6 BAB II DASAR TEORI 2.1. Tektonik Lempeng Bumi berbentuk
advertisement

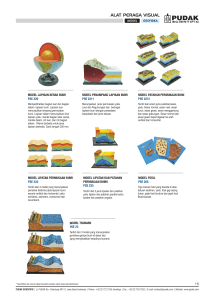
BAB II DASAR TEORI 2.1. Tektonik Lempeng Bumi berbentuk ellipsoid. Bumi terdiri dari beberapa lapisan seperti yang diilustrasikan pada gambar 2.1. Lapisan-lapisan tersebut memiliki sifat dan karakteristik yang berbeda-beda satu sama lain. Lapisan tersebut dibagi atas: 1. Inti bumi terdiri dari inner core (inti dalam) dan inti luar (outer core). Inti dalam bumi merupakan zat padat yang dikelilingi oleh lapisan outer core yang cair. Inti bumi memiliki jari-jari 3500 km. 2. Lapisan mantel bumi terdiri dari lapisan mesosfer dan lapisan asthenosfer (upper mantle). Lapisan mantel bumi memiliki ketebalan 2900 km dan lapisan upper mantle memiliki ketebalan 670 km. Lapisan mesosfer mengelilingi inti bumi. Mesosfer terdiri dari batuan-batuan padat (besi dan silikat magnesium) dan juga lapisan batuan leleh (magma) yang sebagian muncul ke permukaan bumi pada saat letusan gunung api. Lapisan asthenosfer, adalah lapisan atas dari mesosfer, lapisan ini memiliki sifat panas, fluida dan dapat bergerak. 3. Lapisan lithosfer, adalah lapisan terluar bumi, tempat berpijaknya benua dan samudera. Bersifat padat dan kaku dengan suhu yang lebih dingin. Lapisan lithosfer memiliki ketebalan 100 km. Gambar 2.1 Geometri lapisan bumi 6 Lapisan lithosfer seolah olah mengapung dan selalu dalam keadaan tidak stabil, bergerak karena adanya beban atau gaya yang bekerja padanya. Salah satu tenaga endogen yang menyebabkan terjadinya pergerakan lempeng adalah distribusi panas atau dikenal dengan arus konveksi. Arus konveksi terjadi karena massa temperatur tinggi (lapisan inti, mesosfer, dan asthenosfer) mengalir ke daerah bertemperatur rendah (lithosfer) dan sebaliknya massa temperatur rendah mengalir ke daerah bertemperatur tinggi. Menurut teori lempeng tektonik, lithosfer bumi tidak merupakan kesatuan melainkan terpecah-pecah menjadi beberapa bagian yang disebut lempeng (plate) bumi. lempeng terdiri atas dua jenis yaitu, lempeng benua (continental plate) dan lempeng samudera (oceanic plate). Lempeng benua ialah lempeng yang menopang benua, tersusun dari batuan yang relatif ringan seperti granit. Contohnya adalah lempeng Erasia yang menopang benua Asia dan Eropa. Sedangkan lempeng samudera adalah lempeng yang menopang samudera, tersusun dari material batuan yang relatif padat seperti basalt. Contohnya adalah lempeng Pasifik. Tepi-tepi dari lempeng ini, dimana satu sama lainnya akan bertemu dan melawan, merupakan zona dimana aktivitas geologinya tinggi. Ukuran lempeng bervariasi, mulai yang berukuran kecil hingga sangat besar, lempeng-lempeng tersebut bergerak dengan arah dan kecepatan yang berbeda-beda. Visualisasi lempeng benua dan lempeng samudera dapat dilihat pada gambar 2.2. Gambar 2.2 Visualisasi Lempeng Samudera dan Lempeng Benua 7 Secara umum pergerakan lempeng yang terjadi dapat digolongkan ke dalam tiga jenis yaitu: 1. Transform Slip, yaitu pergerakan sejajar antara dua buah lempeng. Batas kedua lempeng yang begerak ini disebut zona singgungan (transform). Zona ini ditandai dengan adanya dua lempeng yang berdekatan bergerak relatif sejajar satu sama lain sehingga pada bidang batas terjadi gesekan. Contoh batas semacam ini adalah sesar San Andreas di California USA. Pada zona singgungan, apabila dua lempeng yang berbatasan bergerak relatif satu sama lain, maka akan timbul gaya saling tekan pada bidang batas kedua lempeng disertai timbulnya energi akibat daya dorong lempeng. 2. Convergance Slip, yaitu pergerakan antara dua buah lempeng yang saling mendekat (menumbuk). Pada batas antara kedua lempeng yang bergerak dapat dibagi menjadi dua zona, yaitu: a. Zona tumbukan (collusion zone) Pergerakan pada zona tumbukan kedua lempeng mengakibatkan terbentuknya pegunungan lipatan karena kedua lempeng tersebut memiliki berat jenis yang sama. b. Zona subduksi (subduction zone) Secara umum bila berat jenis kedua lempeng yang bertumbukan berbeda, dimana lempeng benua bertemu lempeng samudera, lempeng yang lebih berat (lempeng samudera) akan menghujam dibawah lempeng yang lebih ringan (lempeng benua). 3. Divergence Slip, yaitu pergerakan antara dua buah lempeng yang saling menjauh (berlawanan arah). Batas kedua lempeng yang bergerak ini disebut zona divergen. Hasil aktivitas tektonik semacam ini adalah terjadinya semacam punggungan (ridge) di tengah-tengah samudera. Kemudian bila lempeng-lempeng bergerak membentuk celah, mengakibatkan material lelehan dari athenosfer terinjeksi naik keatas, mendingin lalu membentuk lantai samudera baru berupa pematang ditengah samudera, seperti yang terjadi di Samudera Atlantik. Contohnya adalah terbentuknya Atlantik Mid-Ocean Ridge yang memisahkan lempeng benua Afrika dengan lempeng benua Amerika. Pada zona singgungan, apabila dua lempeng yang berbatasan bergerak relatif satu sama lain, maka timbul gaya saling tekan pada bidang batas kedua lempeng disertai timbulnya energi akibat daya dorong masing-masing lempeng. Apabila pergerakan tersebut terjadi terus menerus maka dalam kurun waktu yang lama, energi yang terakumulasi semakin besar. 8 Pada kondisi dimana batuan atau materi pembentuk lempeng tidak dapat lagi menahan gaya yang ditimbulkan oleh gerak relatif tersebut maka energi yang terakumulasi tersebut akan dilepaskan dalam bentuk gelombang gempa yang menjalar ke segala arah. Terjadinya gempa bumi juga dapat dijelaskan dengan Elastic Rebound Theory (gambar 2.3) . Berdasarkan teori ini, diasumsikan pada suatu blok batuan pembentuk lempeng atau blok tektonik bekerja dua gaya yang berlawanan arah. Akibat bekerjanya kedua gaya tersebut blok batuan akan mengalami deformasi atau perubahan bentuk. Pada saat akumulasi gaya masih tidak terlalu besar, respon batuan akan berupa deformasi yang elastis. Tetapi jika saat akumulasi yang bekerja melampaui batas elastisitas batuan, maka batuan akan patah atau fracturing dan pada saat yang bersamaan energi elastik yang terakumulasi akan dilepaskan secara tiba-tiba dalam bentuk gelombang elastik. Elastic Rebound Theory (Puspito, 1998). Gaya dorong penyebab deformasi menyebabkan akumulasi energi pada batas sesar, pada kondisi elastis energi yang ada masih dapat diimbangi oleh elastisitas bidang sesar. Sedangkan pada kondisi fracturing akumulasi energi yang ada sudah tidak dapat dimbangi oleh elastisitas bidang sesar, sedingga menimbulkan patahan. 9 Gambar 2.3 Ilustrasi Elastic Rebound Theory yang dikemukakan oleh Harry Fielding Reid mengenai mekanisme terjadinya gempa Berdasarkan cakupannya, skala gejala geodinamika bumi dapat dibagi menjadi tiga sebagai berikut: 1. Skala Global, skala yang menyangkut bumi secara keseluruhan atau sebagian bumi dan bumi yang dapat dibandingkan sama dengan lempeng tektonik yang terbesar. Informasi tentang pergerakan dapat diperoleh dan disurvey pada jaring geodetik kontinental atau nasional. Gejala-gejala yang termasuk pada skala global ini adalah gerakan antar lempeng, rotasi bumi, gerakan kutub, gaya berat, dinamika konveksi dan sebagainya. 2. Skala Regional, gejala dinamika bumi skala regional terjadi dalam jarak kurang dari ukuran lempeng tektonik yang umum tetapi tidak lebih besar dan beberapa ratus 10 kilometer. Yang termasuk dalam skala ini adalah deformasi regional sepanjang sesar dan geologi regional. 3. Skala Lokal, gejala dinamika bumi skala lokal membicarakan fenomena gerakan regional lebih awal. Beberapa fenomena terjadi dalam skala lokal diantaranya gerakan tanah, perubahan muka air tanah, dan dampak geomagnetik dan geolistrik lokal. 2.2. Sesar Sesar merupakan salah satu bentuk patahan dari lapisan batuan yang mengakibatkan suatu lapisan bergerak relatif turun atau naik, ataupun bergerak ke kanan atau ke kiri terhadap lapisan batuan yang lainya. Berdasarkan pergerakan relatifnya, sesar dapat dikelompokan menjadi tiga bagian, yaitu: 1. Patahan naik (Reverse Fault), menurut teori dasar sama halnya dengan patahan turun, tapi untuk patahan naik ini bagian hanging wall nya relatif bergerak naik terhadap bagian foot wall nya. Salah satu ciri patahan naik adalah sudut kemiringan dari patahan itu termasuk kecil. Kemiringan daripada bidang patahan akan mempunyai sudut kurang dari 45° (thrust fault). Patahan naik dengan kemiringan yang kecil (<10°) disebut over thrust fault. Patahan naik disebabkan batuan bergerak saling mendekat sehingga terjadi gaya tekan. Contoh reserve fault yang dapat dilihat pada gambar 2.4. Gambar 2.4. Patahan naik 2. Sesar normal atau disebut juga sesar turun (Normal Fault), adalah sesar dengan arah gerakan dominan pada arah vertikal, Dip Angle untuk sesar ini cukup besar bila dibandingkan dengan jenis sebelumnya. Atau bisa disebut sebagai suatu rekahan pada lapisan bumi yang memungkinkan satu blok batuan bergerak relatif turun terhadap 11 blok lainya, dalam hal ini kedua batuan saling menjauh. Dapat dilihat pada gambar 2.5. Gambar 2.5. Patahan turun 3. Sesar geser (Strike Slip Fault), adalah sesar dengan arah gerakan domian pada arah horisontal. Sesar ini dibedakan menjadi dua jenis, yaitu sesar geser menganan (RightLateral Strike-Slip fault), sesar geser mengiri (Left-Lateral Strike-Slip Fault). Ilustrasi sesar geser dapat dilihat pada gambar 2.6. Gambar 2.6. Patahan Geser Pada batas lempeng yang berupa sesar, sering kali ditemui gempa-gempa kecil sebelum terjadinya sebuah gempa besar, seperti halnya dijelaskan dalam Gambar 2.7 dibawah ini: 12 Gambar 2.7 Karakteristik Bidang Sesar Apabila bidang kontak dari sesar rata, maka tidak akan terjadi akumulasi energi, kemungkinan tidak akan terjadi gempa , karena blok-blok yang berbatasan saling melewati begitu saja. Energi yang terjadi kecil dan masih dapat diimbangi oleh sifat elastik dari lempeng. Tetapi, bidang kontak sesar biasanya tidak rata sehingga pada waktu terjadi kontak, blok-blok tektonik yang bertemu pada suatu saat akan mengalami mekanisme saling menahan atau mengunci sehingga kedua blok tertahan dan tidak dapat bergerak. Pada saat itu akan terjadi akumulasi energi akibat adanya dua gaya yang berlawanan arah, energi yang terkumpul semakin lama semakin besar sampai pada suatu saat akumulasi energi tersebut tidak dapat diibangi oleh elastisitas dari bidang kontak. Blok-blok lempeng yang tadi saling mengunci akan terlepas disertai pelepasan energi yang menjadi gelombang gempa. Setelah pelepasan energi tersebut, kedua blok lempeng akan mulai bergerak kembali sampai pada suatu saat blok – blok lempeng itu akan menemukan keadaan stabil lagi. Pada saat terkuncinya blok lempeng tektonik, titik-titik pada daerah yang berada di daerah sekitar sesar mempunyai kecepatan gerak yang kecil, namun memiliki energi yang besar karena pada daerah tersebut terdapat akumulasi energi. Sedangkan titik-titik yang terletak jauh dari pusat penguncian sesar akan memiliki kecepatan gerak yang besar, tetapi akumulasi energinya tidak sebesar pada daerah sekitar sesar. Pada titik dimana pergerakannya nol dapat diprediksi sebagai pusat penguncian sesar (locked area). Ini berguna sebagai salah satu cara memprediksi posisi sesar. Sebagai contoh, pada gambar dibawah ini, dapat dikatakan bahwa 13 pusat penguncian sesar terletak pada perpotongan salib sumbu dimana nilai pergerakannya nol. Kecenderungan besarnya vektor pergeseran akan berbanding lurus dengan jarak posisi titik dari tempat kedua blok terkunci. Mekanisme pengakumulasian energi pada sesar diilustrasikan pada Gambar 2.8 dibawah: Gambar 2.8. Kecepatan Bidang sesar dan perbandingan dalam koordinat kartesian 2.3. Deformasi Deformasi adalah perubahan posisi, bentuk dan ukuran suatu materi (Kuang, 1996). Bekerjanya beban atau gaya berat yang disertai pengaruh gaya berat dari suatu materi di sekitarnya dalam selang waktu tertentu mempengaruhi bentuk geometrik materi tersebut. Deformasi terjadi pada suatu materi memiliki dua sifat, yaitu: 1. Sifat Elastik. Materi mengalami deformasi akan kembali ke bentuk semula setelah gaya deformasinya tidak berkerja pada materi tesebut. 2. Sifat Plastik. Materi yang mengalami deformasi tidak akan kembali ke bentuk awal setelah adanya deformasi karena efek-efek yang terjadi menempel pada materi terdeformasi. Sedangkan berdasarkan jenisnya, deformasi yang terjadi pada suatu benda dapat dikelompokan kedalam 4 jenis yaitu: 1. Translasi materi yang bersifat kaku (gambar 2.9), Perpindahan posisi materi tanpa mengalami bentuk sesuai acuan. 14 Gambar 2.9. Translasi Materi 2. Rotasi (gambar 2.10), yaitu perubahan posisi materi tanpa mengalami perubahan bentuk yang membentuk perubahan sudut (a) terhadap koordinat acuan. Gambar 2.10. Rotasi Materi 3. Regangan Normal (gambar 2.11), merupakan perbandingan perubahan panjang (dx) terhadap panjang asalnya (X). 15 Gambar 2.11 Regangan Normal 4. Regangan geser (gambar 2.12), atau regangan menyilang, merupakan perubahan sudut dalam benda padat ketika terdeformasi. Gambar 2.12 Regangan Geser 2.4. Metode Analisis Deformasi Analisis deformasi bertujuan untuk menentukan kuantitas pergeseran dan parameterparameter deformasi yang mempunyai karakteristik dalam ruang dan waktu (Chrzanowski et al, 1986). Parameter-parameter deformasi ini didapat dari hasil pergeseran koordinat titik objek dari pengamatan yang dilakukan berkala. Secara garis besar, tahapan-tahapan yang dilakukan dalam analisis deformasi yaitu: 1. Penyelenggaraan kerangka dasar serta penentuan metode pengukuran yang tepat 2. Pengolahan serta analisis data 16 3. Analsis nilai pergeseran yang terjadi pada benda terdeformasi 4. Penentuan model deformasi yang sesuai 2.4.1 Analisis geometrik Analisis geometrik dilakukan jika kita hanya tertarik pada status geometric (ukuran dan dimensi) dari objek terdeformasi, dengan menggunakan data hasil pengamatan geodetic terhadap efek-efek respon suatu materi terhadap gaya yang bekerja padanya, maka disusun model matematik yang mewakili jenis deformasi. Analisis geometric terdiri dari dua jenis: 1. Pergeseran Analsis pergeseran merupakan analisis yang menunujukan perubahan posisi suatu benda dengan menggunakan data perbedaan posisi yang didapat dari perataan data pengamatan pada kala berbeda. 2. Regangan Analsis regangan merupakan analisis yang menunjukan perubahan posisi, bentuk dan ukuran suatu benda dengan menggunakan data pengamatan geodetic langsung atau menggunakan data regangan yang diperoleh dari data pengamatan geodetic perubahan posisi. 2.5. Teori Elastisitas Jika suatu benda dikenai gaya luar, maka benda tersebut akan mengalami perubahan bentuk melewati batas elastisitasnya, perubahan bentuk benda tersebut akan kembali kebentuk semula apabila gaya luar sudah dilepas. Teori elastisitas ini perlu dikaji karena merupakan dasar dalam mempelajari tegangan (stress) dan regangan (strain). 2.5.1. Regangan (Strain) Perpindahan partikel suatu benda elastis selalu menimbulkan terjadinya perubahan benda tersebut. Menurut (Timonesko, 1986 seperti dikutip Ma’ruf, 2001) jika perubahan bentuk tersebut dipandang sebagai perubahan kecil. Dalam sistem koordinat kartesian tiga dimensi, perpindahan kecil partikel yang berubah bentuk diuraikan dalam komponen εx, εy dan εz, yang masing-masing sejajar terhadap sumbu koordinat kartesian X, Y, Z. 17 Jika benda mengalami perubahan bentuk dengan g, h dan i merupakan komponen perpindahan titik P, maka perpindahan titik A yang searah dengan sumbu X adalah turunan tingkat pertama dalam dx yaitu: (2.1) Akibat perubahan panjang fungsi u sebesar sesuai dengan pertambahan panjang elemen PA adalah . Oleh karena itu satuan perpanjangan pada titik P dalam arah X adalah . Dengan cara yang sama satuan perpanjangan dalam arah Y dan Z adalah dan . Untuk perubahan sudut, tinjaulah sudut antara elemen PA dan PB pada gambar (…). Jika g dan h adalah perpindahan titik P dalam arah X dan Y, maka perpidahan titik A dalam arah Y dan titik B dalam arah X adalah (h+ ) dan (g+ ). Akibat dari perpindahan ini maka P’A’ merupakan perpindahan baru elemen PA yang letaknya miring terhadap arah awal dengan sudut kecil . Dengan cara yang sama arah P’B’ miring terhadap PB dengan sudut kecil . Dengan demikian sudut antara elemen PA dan PB berkurang sebesar sudut + . Sudut ini adalah regangan geser antara bidang XY dan YZ. Dengan cara yang sama maka regangan geser antara bidang XY dan XZ serta bidang YX dan YZ dapat diperoleh. Dengan demikian terdapat 6 komponen regangan, yaitu 3 komponen satuan perpanjangan dalam arah saling tegak lurus (εxx, εyy, εzz) dan regangan geser dengan arah yang sama (εxy, εxz, εyz). Keenam besaran ini dirumuskan sebagai berikut: ; ; ; ; (2.2) 2.5.2. Translasi dan Rotasi Translasi adalah bergesernya posisi suatu benda sesuai dengan koordinat acuan tanpa mengalami perubahan bentuk, pada gambar (….) translasi dinyatakan searah sumbu X (g), searah sumbu Y (h) dan searah sumbu Z (i). sedangkan rotasi adalah perubahan posisi benda yang membentuk perubahan sudut sumbu koordinat acuan tanpa mengalami perubahan bentuk. 18 Ω Ω Ω Ω 2.6. ; Ω Ω (2.3) Penentuan parameter deformasi Jenis-jenis deformasi dalam sistem koordinat merupakan fungsi dari parameter-parameter deformasi. Parameter-parameter deformasi ini terdiri dari parameter translasi, rotasi dan regangan, parameter ini dapat dihitung jika fungsi pergeseran dari benda diketahui. Fungsi pergeseran suatu benda dalam koordinat toposentrik tiga dimensi dinyatakan sebagai: , , ; ! !" # , , ; ! !" # $ , , ; ! !" # % , , ; ! !" # (2.4) Dimana dn, de, du; sebagai komponen yang menggambarkan pergeseran kea rah n,e, u yang merupakan fungsi dari posisi dan waktu. Dalam sistem koordinat toposentrik tiga dimensi parameter-parameter benda yang terdeformasi adalah: a0 : translasi dalam arah sumbu n b0 : translasi dalam arah sumbu e c0 : translasi dalam arah sumbu u Ω&' Ω() ) ( Ω&* Ω+) + ) Ω'* Ω+( + ( && '' ** ,& ( ) + ) + ( : rotasi terhadap sumbu u : rotasi terhadap sumbu e : rotasi terhadap sumbu n & : regangan normal pada arah sb n ,' ' : regangan normal pada arah sb e ,* * : regangan normal pada arah sb u 19 ε&' ε() ) ( + + ε&* ε+) ) ε'* ε+( ( ( ) + ) + ( : regangan geser pada arah sb n dan e : regangan geser pada arah sb n dan u : regangan geser pada arah sb e dan u Hubungan fungsional antara pergeseran dan parameter-parameter deformasi ditulis sebagai berikut (Ma’ruf, 2001): d = T + εX + ΩX (2.5) dimana: d = vektor pergeseran T = matrik translasi ε = matrik regangan Ω = matrik rotasi Elemen-elemen matrik regangan (ε): .&& .&' . / .'& .'' .*& .*' .&* .&& .'& .'* 0 = / .&' .'' .** .&* .'* .*& .*' 0 .** (2.6) Elemen-elemen matrik rotasi (Ω): 0 Ω&' Ω&* 0 Ω&' Ω&* Ω / Ω'& 0 Ω'* 0 = / Ω&' 0 Ω'* 0 Ω*& Ω*' 0 Ω&* Ω'* 0 (2.7) Berdasarkan persamaan (2.6) dan persamaan (2.7), maka persamaan (2.5) dapat dinyatakan sebagai berikut: 34 .&& .&' / 0 /54 0 / .'& .'' .*& .*' 64 .&* 0 Ω&' Ω&* .'* 0 7 8 / Ω&' 0 Ω'* 0 7 8 .** Ω&* Ω'* 0 Dalam bentuk persamaan linear menjadi: 20 (2.8) dn = a0 + εnn n + εne e + εnu u + Ωne e + Ωnu u de = b0 + εne n + εee e + εeu u - Ωne n + Ωeu u du = c0 + εnu n + εeu e + εuu u - Ωnu n - Ωeu u dalam bentuk matrik dapat ditulis sebagai berikut: d = Bc (2.9) dengan d = [dn de du]T 1 0 0 0 0 0 0 0 1 0 0 0 0 0 9 : < 0 0 1 0 0 0 0 c = [a0 b0 c0 εnn εee εuu εne εnu εeu Ωeu Ωnu Ωne] Σ,, >,& $ >,',& >,*,& >,&,' >,' >,*,' >,&,* >,',* % >,* Setelah vektor pergeseran (d), matriks desain (B), matriks variansi-kovariansi vektor pergeseran (Σdd) diperoleh, maka parameter-parameter deformasi (c) dapat dihitung dengan menggunakan hitung perataan kuadrat terkecil: c = (BT Σdd B)-1 (BT Σdd d) (2.10) dengan standar deviasi parameter-parameter diperoleh dari: Σpp = (BT Σdd B)-1 (2.11) 21 2.7. Global Positioning System Global Positioning System (GPS) adalah sistem satelit navigasi dan penentuan posisi milik Amerika Serikat yang didesain untuk memberikan posisi dan kecepatan tiga dimensi yang teliti serta informasi mengenai waktu, secara kontinu di seluruh dunia tanpa bergantung waktu dan cuaca, kepada banyak orang tanpa tergantung pada batas-batas politik dan batas alam. [Abidin, 2001]. Konsep dasar penentuan posisi dengan GPS adalah reseksi (pengikatan kebelakang) dengan jarak, yaitu dengan pengukuran jarak secara simultan ke beberapa satelit GPS yang koordinatnya diketahui. Dimana posisi satelit diketahui kemudian dihitung posisi pengamat, dengan mengukur jarak antara satelit dan pengamat. Dalam hal ini terdapat tiga parameter posisi pengamat (Xr, Yr, Zr). Pengukuran jarak dari satelit ke receiver dapat dilakukan melalui pengamatan Pseudorange dan Carier Phase. Prinsip pengamatan pseudorange adalah pengukuran jarak, yaitu dengan membandingkan kode yang diterima dari satelit, dengan kode replika yang diformulasikan didalam receiver. Waktu yang diperlukan untuk menghimpitkan kedua kode tersebut adalah waktu yang diperlukan oleh kode tersebut untuk menempuh jarak dari satelit ke pengamat. Dengan mengalikan lama waktu yang diperlukan untuk menghimpitkan kedua kode tersebut dengan kecepatan cahaya, maka jarak antara pengamat dengan satelit dapat ditentukan. Untuk pengukuran jarak dengan fase, nilai ambiguitas fase harus ditentukan terlebih dahulu, karena hasil ukuran fase sinyal GPS bukanlah merupakan jarak absolut dari satelit ke receiver. Untuk mendapatkan jarak antara pengamat dan satelit, panjang gelombang dikalikan dengan jumlah hasil ukuran fase + cycle ambiguity. 2.7.1. Kesalahan dan Bias Dalam perjalanannya dari satelit hingga mencapai antena receiver di permukaan bumi, sinyal GPS akan dipengaruhi oleh beberapa kesalahan dan bias. Kesalahan itu diantaranya: 1. Cycle slips Fenomena berubahnya nilai ambiguitas fase, yang disebabkan oleh terputusnya sinyal dari satelit ke penerima sehingga menyebabkan terjadinya inisiasi ulang dalam penetapan nilai 22 ambiguitas fase. Sumber penyebab cycle slips dapat dikategorikan menjadi tiga bagian, yaitu (1) terhalangnya sinyal satelit oleh pohon, gedung, dsb, (2) rendahnya nilai SNR akibat kondisi ionosfer yang kurang baik, dan (3) terjadinya gangguan dalam sistem alat penerima sehingga menyebabkan kesalahan dalam pemrosesan sinyal 2. Multipath Suatu fenomena dimana satu atau lebih sinyal yang dipantulkan oleh objek di permukaan bumi, mencapai antenna sebagai tambahan pada sinyal yang datang langsung dari satelit sehingga sinyal yang diterima antenna merupakan perpaduan (interferensi) antara sinyal langsung dari satelit dan sinyal-sinyal pantul tersebut . 3. Noise Bagian dari suatu radiasi yang merupakan informasi yang tidak dapat dimengerti atau tidak diinginkan oleh penerima. Istilah ini biasa digunakan dalam bidang elektronika untuk menyatakan besarnya variasi acak dari gelombang radio, tegangan, dsb. a. Ambiguitas fase Jumlah gelombang penuh antara satelit dan alat penerima yang tidak teramati / tidak diketahui. b. Kesalahan jam receiver Adalah tidak stabilnya dan tidak telitinya jam yang digunakan receiver dibandingkan dengan jam atom yang digunakan oleh satelit. 2.7.2. Ketelitian Posisi Ketelitian posisi yang diperoleh dari survai GPS mempunyai tingkat ketelitian yang berbedabeda dari yang sangat teliti (orde millimeter) sampai orde meter. Tingkat ketelitian tersebut secara umum bergantung pada empat faktor yaitu ketelitian data yang digunakan, geometri pengamatan, strategi pengamatan yang digunakan, dan strategi pengolahan data yang diterapkan. Faktor-faktor tersebut dapat digambarkan pada Tabel 2.1 berikut [Abidin,2001]: 23 Tabel 2.1 Faktor-faktor yang mempengaruhi ketelitian survey GPS KETELITIAN DATA GEOMETRI PENGAMATAN STRATEGI PENGAMATAN STRATEGI PENGOLAHAN DATA 2.7.3 •Jenis data • Kualitasreceiver GPS • Level dari kesalahan dan bias • Lokasi titik • Jumlah titik •Konfigurasi jaring • Karakteristik baseline • Jumlah satelit • Lokasi dan distribusi satelit • Metode pengamatan • Waktu pengamatan • Lama pengamatan • Pengikatan ke titik tetap • Perangkat lunak • Pengolahan awal • Eliminasi kesalahan dan bias • Pengolahan baseline • Perataan jaring • Kontrol kualitas • Transformasi koordinat Metode Penentuan Posisi Berdasarkan mekanisme pengaplikasiannya, metode penentuan posisi dengan GPS dapat dikelompokkan atas beberapa metode yaitu [Abidin, 2000]: absolute, differential, static, kinematic, rapid static, pseudo-kinematic, dan stop and go. Metode penentuan posisi dengan GPS dapat dibagi menjadi 2 metode secara garis besar, yaitu absolut positioning dan differential positioning. Metode-metode ini yang menentukan ketelitian posisi yang diinginkan. Metode differential positioning minimal membutuhkan 2 receiver, ketelitian yang diperoleh bisa sampai ke fraksi millimeter. Hal ini disebabkan atara lain karena differencing process dapat mengeliminir atau mereduksi efek-efek dari berbagai kesalahan dan bias. Selain itu, posisi titik juga ditentukan relatif terhadap monitor station. Efektifitas differencing process sangat tergantung pada dekat-jauhnya dari monitor station, semakin dekat akan semakin efektif. Titik yang ditentukan posisinya bisa diam (statik) atau bergerak (kinematik) dan dapat menggunakan data pseudorange atau dan data fase. Aplikasi 24 utama yang biasa digunakan pada metode ini adalah survey geodesi, geodinamika dan seismik maupun navigasi yang berketelitian tinggi. Untuk kasus studi geodetik aktifitas sesar, tentunya dibutuhkan peralatan, metode penentuan posisi, dan strategi pengolahan data yang memadai karena diharapkan dapat memberikan nilai vektor pergerakan dengan tingkat presisi sampai beberapa mm. Dengan kemampuan dan konsistensi yang dimiliki GPS maka diharapkan besarnya pergerakan sesar yang kecil dan lamban akan dapat terdeteksi dengan baik. Prinsip penentuan aktivitas sesar dengan metode survei GPS adalah dengan cara menempatkan beberapa titik di beberapa lokasi yang dipilih, secara periodik ditentukan koordinatnya secara teliti dengan menggunakan metode survei GPS. Sedangkan Metode yang dipakai dalam penelitian Sesar Cimandiri ini adalah metode diferensial (baseline) + data Fase dan psudorange dengan moda jaring. Dalam hal ini metode yang dipilih adalah statik geodetik (penentuan posisi dengan differensial) dengan tipe episodik (ilustrasi dapat dilihat pada gambar 2.13). Gambar 2.13 Pemantauan deformasi sesar [Abidin 2001] 25 2.8 Euler Pole Titik – titik pengamatan GPS sesar Cimandiri mengalami beberapa pergerakan. Pergerakan tersebut harus dihilangkan agar vektor pergeseran yang didapatkan nantinya adalah vektor pergeseran sesar yang sesungguhnya. Pergerakan tersebut antara lain: 1. Pergerakan sumbu rotasi bumi relatif terhadap kerak bumi atau yang disebut pergerakan kutub bumi. 2. Pergerakan sunda block (sunda block motion). Sesar cimandiri merupakan bagian dari sunda blok, untuk mendapatkan vektor pergeseran titik – titik pengamatan sesar cimandiri yang sesungguhnya, maka efek dari sunda block motion ini harus dihilangkan Vektor pergeseran yang didapat dari pengolahan data GPS masih dipengaruhi oleh pergerakan sunda blok. Selanjutnya untuk mendapatkan nilai pergeseran titik yang menggambarkan aktifitas sesar, maka efek dari pergerakan blok sunda (sunda block motion) harus dihilangkan. Untuk menghitung besarnya pergerakan sunda blok, digunakan metode Euler Pole. Ilustrasi penentuan pergerakan sunda blok dengan metode euler pole dapat dilihat pada gambar 2.14 : Gambar 2.14 Ilustrasi euler pole Pergerakan lempeng pada permukaan bumi atau ellipsoid dihitung berdasarkan kecepatan pergerakan lempeng tersebut terhadap suatu sumbu/pole. Dengan sumbu ini kita menentukan pergerakan pada titik – titik di permukaan bumi. Titik–titik tersebut digambarkan dalam 26 lintang (λ), bujur (φ) dan sudut rotasi (ө). Kecepatan rotasi digambarkan dengan arah dan besar sudut rotasi (ө). Namun sudut rotasi tersebut sangat kecil (dθ), maka kecepatan sudut rotasi dirumuskan sebagai berikut: ω = dθ/dt (2.12) Maka kecepatan blok (dalam cm/tahun) dihitung berdasarkan dengan persamaan: V =ω sin R α (2.13) Dimana: R adalah panjang jari – jari bumi. α adalah sudut antara suatu titik pada blok dengan sumbu putar / pole. Setelah nilai pergeseran sunda blok diketahui maka vektor pergeseran masing – masing titik – titik pengamatan dikurangkan dengan vektor pergerakan sunda blok pada titik tersebut. = e sesar n sesar e pengolahan =n −e pengolahan (2.14) sundablock −n (2.15) sundablock 27
![IPBA_2_c_Tektonik Lempeng [Compatibility Mode]](http://s1.studylibid.com/store/data/000167428_1-721baf6c672bdd2e349e738c9d3aa5e6-300x300.png)