Tesis_Bab I, II, III, IV, V, Daftar Pustaka
advertisement

1
BAB I
PENDAHULUAN
A. Latar Belakang
Motor DC (Direct Current) atau motor arus searah termasuk dalam
kategori jenis motor yang paling banyak digunakan baik dalam lingkungan
industri, peralatan rumah tangga hingga ke mainan anak-anak ataupun
sebagai piranti pendukung sistem instrumen elektronik. Motor DC memiliki
jenis yang beragam mulai dari tipe magnet permanen, seri, shunt ataupun
jenis magnet kompon. Tipe motor DC diimplementasikan berdasarkan
jenis magnet yang digunakan. Kelebihan motor DC memiliki torsi yang
tinggi, tidak memiliki kerugian daya reaktif dan tidak menimbulkan
harmonisa pada sistem tenaga listrik yang mensuplainya.
Perencanaan suatu sistem tenaga baik dalam skala industri besar
ataupun kecil tidak akan lepas dari suatu asumsi bagaimana sistem ini
akan berjalan dengan baik melalui suatu sudut tinjauan perilaku atau
karakteristik sistem. Karakteristik utama yang harus diketahui adalah
karakteristik elektrik sistem tersebut seperti lonjakan arus start, profil
tegangan transien hingga analisa transien pada saat sistem terjadi
gangguan. Kemampuan mengetahui kondisi sistem yang sebenarnya
akan memberikan hasil perencanaan yang baik dan optimal. Proses
interpretasi atau menafsirkan perilaku sistem bukan merupakan pekerjaan
2
yang mudah karena akan berkaitan dengan perilaku statik dan dinamik
sistem.
Penggunaan perangkat lunak komputer juga akan menentukan
akurasi model yang diambil.
Kontrol otomatik telah memegang peranan yang penting dalam
perkembangan ilmu pengetahuan. Kontrol otomatik merupakan bagian
terpenting dalam industri saat ini.
Kontrol PID (Proportional – Integral – Derivative) merupakan
kombinasi dari ketiga jenis kontroler. Jika masing-masing dari ketiga jenis
kontroler tersebut berdiri sendiri maka hasil yang dicapai akan kurang baik
sebab masing-masing memiliki kelemahan maupun kelebihan sendirisendiri.
Untuk memenuhi sistem yang diinginkan maka ketiga parameter
PID harus ditetapkan secara optimal. Ada beberapa metode tuning PID
konvensional yang telah dikembangkan, seperti metode coba-coba (cut
and try method), metode Ziegler-Nichols, metode tanggapan (step
respons), dan metode analitik.
Dari beberapa percobaan yang telah dilakukan dengan metodemetode diatas dapat dilihat bahwa dengan menggunakan pengendali PID
dalam suatu sistem mempunyai kelemahan, yakni bahwa parameterparameter dalam pengendali harus selalu diubah (tuned up) bila terjadi
perubahan didalam sistem, perubahan tersebut akan menyebabkan
terjadinya penalaan kembali dari parameter-parameter PID tersebut
(Thomas & Poongodi, 2009).
3
Dengan melihat hal tersebut diatas, penulis mencoba melakukan
penalaan dari parameter-parameter dengan mempertahankan kondisi
yang sudah ditentukan.
Penalaan pengendali PID adalah yang paling popular abad ini
karena
keefektifannya,
sederhana
dalam
implementasi
dan
luas
penggunaannya. Konfigurasi standar penalaan dari pengendali PID
memiliki parameter- parameter Kp, Ki dan Kd yang dipilih atau ditentukan
agar karakteristik plant sesuai dengan kriteria desain yang diharapkan.
Untuk penelitian ini, model yang dipilih adalah pengendalian
kecepatan dari motor arus searah. Alasannya adalah bahwa model ini
sering ditemui di instalasi industri. Pengendali PID ini akan dirancang
menggunakan metoda penalaan Ziegler Nichols dan dianalisa hasilnya.
B. Rumusan Masalah
Berdasarkan latar belakang diatas, maka dapat dirumuskan
beberapa permasalahan, antara lain:
1. Bagaimana merancang parameter PID dengan penalaan Ziegler
Nichols untuk kendali kecepatan motor arus searah.
2. Bagaimana menguji hasil penalaan PID dengan menggunakan
simulasi.
4
C. Definisi Masalah
Definisi masalah dalam penelitian ini adalah :
1. Plant yang dipakai untuk pengujian adalah plant motor arus searah
terkendali jangkar yang dapat merepresentasikan suatu plant.
2. Kriteria performansi sistem yang direncanakan meliputi konstanta
Kp, Ki dan Kd menggunakan metode penalaan Ziegler Nichols.
3. Hasil penelitian akan ditampilkan dengan menggunakan proses
simulasi Matlab.
D. Tujuan Penelitian
Tujuan dari penelitian ini adalah:
1. merancang parameter PID dengan penalaan Ziegler Nichols untuk
kendali kecepatan motor arus searah terkendali jangkar berbasis
perhitungan nilai akar kuadrat rata-rata.
2. Mengsimulasikan hasil penalaan PID dengan metode Ziegler
Nichols untuk mengendalikan kecepatan motor arus searah
terkendali jangkar sehingga memiliki performa yang lebih optimal.
E. Manfaat Penelitian
Adapun
manfaat
dan
kontribusi
dari
penelitian
ini
adalah
mengembangkan dan meningkatkan pemahaman tentang pengendali PID
tertala berbasis perhitungan nilai akar rata-rata dalam memperoleh
5
parameter-parameter PID yang optimal sehingga dihasilkan sistem yang
memenuhi kriteria performansi yang diharapkan.
F. Sistematika Penulisan
Untuk memudahkan pembatasan, laporan tugas akhir ini disusun
dengan sistematika sebagai berikut:
BAB I : PENDAHULUAN
Pada bab ini menjelaskan tentang Latar belakang, Rumusan Masalah,
Batasan Masalah, Tujuan penelitian, Manfaat Penelitian, dan Sistematika
Penulisan.
BAB II : TINJAUAN PUSTAKA
Pada bab ini membahas tentang teori-teori yang berkaitan dengan
penelitian yang akan dilakukan, seperti penjelasan umum dari Motor arus
searah, Roadmap Penelitian, dan Kerangka Pikir.
BAB III : METODE PENELITIAN
Pada bab ini akan diuraikan tahapan metode perancangan sistem
pengendalian motor arus searah dengan pengendali PID tertala berbasis
perhitungan nilai akar kuadrat rata-rata.
BAB IV : PERANCANGAN DAN SIMULASI
Pada bab ini berisi tentang data hasil penelitian
dari simulasi
pengendalian kecepatan motor arus searah dan analisa dari performansi
sistem pengendalian dengan pengendali PID tertala berbasis perhitungan
nilai akar kuadrat rata-rata.
6
BAB V : KESIMPULAN
Pada bab ini berisi kesimpulan yang diperoleh dari hasil analisa.
7
BAB II
TINJAUAN PUSTAKA
A. Motor DC
Motor listrik merupakan perangkat elektromagnetis yang mengubah
energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk,
misalnya memutar impeller pompa, fan atau blower, menggerakkan
kompresor, mengangkat bahan, dan lain-lain (Pinem, 2009). Motor listrik
digunakan juga di rumah (mixer, bor listrik, fan angin) dan di industri.
Motor arus searah memerlukan suplai tegangan yang searah pada
kumparan medan untuk diubah menjadi energi mekanik. Kumparan
medan pada motor arus searah disebut stator (bagian yang tidak berputar)
dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi
putaran pada kumparan jangkar dalam pada medan magnet, maka akan
timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah
putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus
searah
adalah
membalik phasa
tegangan
dari
gelombang
yang
mempunyai nilai positif dengan menggunakan komutator, dengan
demikian arus yang berbalik arah dengan kumparan jangkar yang
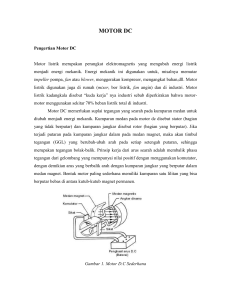
berputar dalam medan magnet. Bentuk motor paling sederhana memiliki
kumparan satu lilitan yang bisa berputar bebas diantara kutub-kutub
magnet permanen.
8
Gambar 1. Motor DC Sederhana (Pinem, 2009)
Catu tegangan dc dari baterai menuju ke lilitan melalui sikat yang
menyentuh komutator, dua segmen yang terhubung dengan dua ujung
lilitan. Kumparan satu lilitan pada gambar diatas disebut angker dinamo.
Angker dinamo adalah sebutan untuk komponen yang berputar di antara
medan magnet.
Motor arus searah dibedakan berdasarkan sumber penguatannya
(exciter), penggolongan motor arus searah adalah sebagai berikut:
a. Motor DC berpenguatan bebas
Pada motor DC berpenguatan bebas, sumber penguatnya tersendiri,
biasanya berupa sumber DC yang lain. Oleh karena itu, kumparan
medannya
terpisah
(tidak memiliki
hubungan
listrik)
dengan
kumparan jangkarnya.
b. Motor DC berpenguatan sendiriMotor DC berpenguatan sendiri tidak
memiliki sumber penguat tersendiri. Kumparan medan dihubungkan
dengan kumparan jangkar. Berdasarkan hubungan itu, motor DC
berpenguatan sendiri dapat dibedakan menjadi:
9
-. Motor DC seri (kumparan medan seri dengan kumparan jangkar)
-. Motor DC shunt (kumparan medan parallel dengan kumparan
jangkar)
-. Motor DC kompon (memiliki dua kumparan lainnya dihubung seri
dengan
kumparan
jangkar,
sedangkan
kumparan
lainnya
dihubung paralel dengan kumparan jangkar).
Model
fisik
dari
sebuah
motor
DC
secara
lengkap
yang
menggambarkan bagan elektrik dan mekanik:
Gambar 2. Model fisik motor DC Terkendali Jangkar (Harifuddin, 2008)
1. Model Dinamik motor DC :
Bagian elektrik :
ea (t) − eb (t) = R a ia (t) + La
dia (t)
dt
dia (t)
1
= [ ea (t) − eb (t) − R a ia (t) ]
dt
La
(1)
Bagian mekanik :
dω(t) 1
= [ T(t) − Bω(t) ]
dt
J
(2)
Sifat motor, berlaku: T(t) = K m ia (t)
(3)
Sifat generator, berlaku: eb (t) = K b ω(t)
(4)
10
2. Model Bagan Kotak :
Berdasarkan model dinamik diatas maka motor arus searah dapat
direpresentasikan dalam bentuk bagan kotak, sebagai berikut :
Elektrik
Raia(t)
ea( t)
1
𝐿𝑎
Mekanik
B 𝜔(t)
Ra
dia( t)
dt
𝑑𝑡
ia(t)
Km
B
1
T(t)
J
d𝜔( t)
dt
𝜔(t)
𝑑𝑡
eb(t)
Kb
Gambar 3. Model bagan kotak Motor DC Terkendali Jangkar
3. Model Nisbah Alih
Model nisbah alih yang akan dicari, yaitu :
a. Masukan tegangan jangkar Ea , keluaran berupa kecepatan putar ω
Ea (S)
G 1 (S)
ω(S)
b. Masukan tegangan jangkar Ea, keluaran berupa arus jangkar Ia
Ea (S)
G 2 (S)
Ia(S)
Asumsikan keadaan awal = 0, maka dapat dilakukan transformasi
Laplace dari bagan kotak pada gambar 3 menjadi sebagai berikut :
Ea (s) = ℒ[ea (t)],
Eb (s) = ℒ[eb (t)]
Ia (s) = ℒ[ia (t)],
ω(s) = ℒ[ω(t)]
11
Maka akan diperoleh gambar 4 sebagai berikut :
Elektrik
RaIa(s)
Ea(s)
B 𝜔(𝑠)
Ra
(
sIa (s)
1
𝐿𝑎
1
s
Ia(s)
Mekanik
B
)
1 sω(s)
Km
T(s)
J
1
s
ω(s)
Eb(s)
Kb
Gambar 4(a)
Penyederhanaan model bagan kotak diatas, sebagai berikut :
E a (s)
_
+_
1
La s R a
I a (s)
Km
1
Js B
ω(s)
E b (s)
K
b
Gambar 4(b)
E a (s)
Km
L a s R a Js B
+_
ω(s)
E (s)
b
K
b
Gambar 4(c)
E a (s)
Km
La s R a Js B K m K b
ω(s)
Gambar 4(d)
Gambar 4. Penyederhanaan bagan kotak motor DC Terkendali Jangkar
12
Analisis Nisbah Alih Motor DC Kendali Jangkar
a. Untuk masukan Ea(s) dan keluaran ω(s) :
Dari gambar diatas maka :
G1 (s) =
ω(s)
Km
=
(L
)(Js
Ea (s)
+ B) + K m K b
as + Ra
=
JLa
=
G1 (s) =
s2
Km
+ (JR a + BLa )s + (BR a +K m . K b )
K m /JLa
JR + BL
BR +K . K
s2 + ( a JL a ) s + ( a JL m b )
a
a
Ko
(s 2 + 2ξωn s + ωn 2 )
(5)
Dari persamaan (5) terlihat bahwa :
Ko =
Km
JLa
;
2ξωn =
(𝐽𝑅𝑎 + 𝐵𝐿𝑎 )
𝐽𝐿𝑎
;
ωn 2 =
(BRa + Km . Kb )
JLa
Dimana :
𝜉
= Nisbah redaman (damping ratio)
ωn = Frekuensi alamiah tak teredam (undamped natural
frequency) (rad/sec)
b. Untuk masukan Ia(s) dan keluaran ω(s) :
ω(s)
Km
=
Ia (s) Js + B
G2 (s) =
=
→
Ia (s) Js + B
=
ω(s)
Km
Ia (s) ω(s) Js + B
Km
∗
=
x
ω(s) Ea (s)
Km
(La s + R a )(Js + B) + K m K b
1⁄JLa
Js + B
x
JLa s2 + (BLa + JR a )s + (BR a + K m K b ) 1⁄JLa
13
1
B
La s + JLa
G2 (s) =
(BR a + K m K b )
(BLa + JR a )
s2 +
s+
JLa
JLa
1
B
s
+
L
JLa
G2 (s) = 2 a
s + 2ωn s + ω2n
G2 (s) =
G2 (s) =
1
1
B
1
s( 2
)+
( 2
)
2
La
s + 2ωn s + ωn
JLa s + 2ωn s + ω2n
s2
as + b
+ 2ωn s + ω2n
(6)
(7)
Dari persamaan (6) terlihat bahwa :
1
=a
La
;
B
=b
JLa
4. Analisis Kecepatan Putar Motor ω(t) dan Arus Jangkar Ia (t):
a. Analisis Kecepatan Putar Motor ω(t)
G1 (s) =
ω(s)
Ea (s)
ω(s) = G1 (s) ∗ Ea (s)
(8)
dimana: Ea (s) = ℒ {ea (t)} = Ea nom x
1
S
(9)
Dengan mengsubstitusi persamaan (5) dan (9) ke persamaan (8),
maka:
(s) =
s2
Ko
Ea nom
x(
)
2
+ 2n s + n
s
(s) = (K o . Ea nom ) x
1
s(s 2 + 2n s + n 2 )
(10)
14
Sehingga, (t) dapat dicari dengan invers Transformasi Laplace :
(t) = ℒ −1 {(s)}
−1
= ℒ
{(Ko . Ea nom ) x
(t) = (K o . Ea nom ) [
s(s2
1
}
+ 2n s + n 2 )
1
1
−
e−n t sin(d t + )]
2
n
n d
(11)
Dimana :
d ≡ ωn √1 − 2
∅ ≡ Cos−1
dan
b. Analisis Arus Jangkar ia (t)
Jika Ea (s) = ℒ {𝑒𝑎 (𝑡)} = Ea nom x
dan
1
S
Ia (s) = G2 (s) x Ea (s)
(12)
(13)
Dengan memasukkan pers.(6) dan pers.(12) ke persamaan (13),
diperoleh :
Ia (s) = [
=
1
1
B
1
Ea nom
s( 2
)+
( 2
)] ∗
2
2
La
s + 2ωn s + ωn
JLa s + 2ωn s + ωn
s
Ea nom
1
B. Ea nom
1
[ 2
]+
[ 2
]
2
La s + 2ωn s + ωn
JLa
s(s + 2ωn s + ω2n )
Sehingga nilai ia(t) diperoleh yaitu:
ia (t) = ℒ −1 {Ia (s)}
=
Ea nom −1
1
B. Ea nom −1
1
ℒ [ 2
]
+
ℒ
[
]
La
s + 2ωn s + ω2n
JLa
s(s2 + 2ωn s + ω2n )
15
Dengan menggunakan tabel laplace maka persamaan diatas
diubah menjadi:
ia (t)
E .B 1
Ea 1 ςωnt
1
ςωnt
e
.sin ω t a
e
.sin(ω t )
d L J 2 ω ω
d
La ω
a ωn
n d
d
B. Roadmap Penelitian
Beberapa penelitian sebelumnya yang berhubungan dengan
penelitian tesis ini, antara lain:
1. “Pemodelan Dan Pengendalian Motor DC Terkendali Jangkar” oleh
Harifuddin (2008). Penelitian ini menjelaskan bahwa pengendalian
sebuah motor dimaksudkan untuk memperkecil arus pengasutan
saat motor terhubung ke jala-jala, memperkecil adanya pengaruh
gangguan terhadap kecepatan motor dan bagaimana mengatur
variasi kecepatannya. Metode yang digunakan adalah metode
deskriptif dimana data sheet sebuah motor dianalisis dengan
menggunakan persamaan matematik.
2. “Sistem Kendali Umpan balik (Feedback Control) Menggunakan
Teknik Pengendalian PID (Proporsional Integral Derivative)” oleh
A.Y. Erwin Dodu (2009). Penelitian ini menjelaskan mengenai
sistem pengendalian yang bisa digunakan untuk memperbaiki
performansi suatu sistem dinamis karena terdapat mekanisme
umpan-balik dari kondisi aktual (keluaran sistem) ke keadaan yang
diinginkan (masukan sistem) sehingga didapatkan error yang bisa
16
digunakan untuk mengarahkan kondisi aktual menuju ke keadaan
yang diinginkan.Penggunaan PID pada sistem kendali umpan-balik
akan semakin mempercepat waktu tanggapan sistem.
3. “Pengembangan Metoda Self Tuning Parameter PID Controller
Dengan Menggunakan Genetic Algorithm Pada Pengaturan Motor
Induksi Sebagai Penggerak Mobil Listrik” oleh Era Purwanto,dkk
(2010). Dalam penelitian ini, metode alternatif yang digunakan
adalah Genetic Algorithm (GA) yang diimplementasikan untuk
mendapatkan kombinasi parameter P, I, dan D dari kontroler PID
dalam simulasi pengaturan kecepatan motor induksi tiga fasa
sehingga kecepatan motor dapat dipertahankan agar sama dengan
kecepatan referensi dalam steady-state.
4. “Metode Algoritma Genetika dengan Sistem Fuzzy Logic untuk
Penentuan Parameter Pengendali PID” oleh Bhakti Yudho Suprapto
dan Sariman (2012). Dalam penelitian ini, Algoritma Genetika
dengan sistem Logika Samar (Fuzzy Logic) pada sistem motor arus
searah dipergunakan untuk mendapatkan parameter pengendali PID
yang didasarkan pada nilai mean square error (MSE).
Penelitian yang akan dilakukan ini berbeda dengan penelitianpenelitian sebelumnya. Penelitian ini akan membahas pengendalian
kecepatan motor arus searah terkendali jangkar dengan pengendali PID
tertala berbasis perhitungan nilai akar kuadrat rata-rata.
17
C. Kerangka Pikir
Kerangka pikir pada penelitian ini akan ditunjukkan pada blok
diagram berikut:
Permasalahan
Penggunaan Pengendali PID dengan metoda ZieglerNichols
Solusi
Mendesain sistem pengendali agar diperoleh parameter
Kp, Ki dan Kd sesuai kriteria performansi yang
diharapkan
Metodologi
Mengendalikan kecepatan motor DC terkendali jangkar
dengan pengendali PID tertala berbasis perhitungan
nilai akar kuadrat rata-rata
Hasil Penelitian
Diperoleh parameter Kp, Ki dan Kd yang terbaik
Gambar 5. Kerangka Pikir
18
BAB III
METODE PENELITIAN
A. Pengendali PID
1. Respon Sistem
Respon suatu sistem kontrol selalu menunjukkan osilasi teredam
sebelum
mencapai
steady-state
(Purwanto,
2009).
Penggolongan
karakteristik respons transien suatu sistem kendali terhadap masukan
tangga satuan secara grafik ditunjukkan pada gambar 6.
Pengelompokan ini didefinisikan sebagai berikut:
a. Waktu naik tr :
Waktu naik adalah waktu yang diperlukan oleh respons untuk
naik dari 10% menjadi 90%, 5% menjadi 95%, atau 0% menjadi
100% dari nilai akhir yang biasa digunakan. Untuk sistem atas
redaman waktu naik yang biasa digunakan 10% menjadi 90%.
b. Overshoot maksimum Mp :
Overshoot maksimum adalah nilai puncak kurva respons diukur
dari satuan.
c. Waktu steady-state ts :
Waktu steady-state adalah waktu yang diperlukan untuk
merenspons kurva agar dapat mencapai dan tetap berada dalam
gugus
nilai
akhir
ukuran
yang
disederhanakan
dengan
19
presentase mutlak harga akhirnya (biasanya 2% atau 5%).
Waktu steady-state tadi dihubungkan tetapan waktu terbesar
sistem kontrol.
Gambar 6. Kurva respon tangga satuan menunjukkan tr, Mp dan
ts (Purwanto, 2009)
2. Kendali PID
Sesuai dengan namanya, pengendali ini merupakan kombinasi dari
tiga sistem kendali yaitu proportional, integral dan derivative. Jika masingmasing dari ketiga pengendali tersebut berdiri sendiri, hasil yang dicapai
kurang bagus sebab masing-masing memiliki kelemahan dan kelebihan
sendiri-sendiri (Tatang dkk., 2007). Karena itu kombinasi dari ketiga
sistem kendali tersebut diharapkan dapat mengeliminasi kelemahan
masing-masing dan mampu memberikan kontribusi dari kelebihan masingmasing. Tanggapan sistem kendali PID terhadap perubahan parameter
seperti terlihat pada Tabel 1 sebagai berikut.
20
Tabel 1. Tanggapan sistem kendali PID terhadap perubahan parameter
(Erwin, 2009)
Tanggapan
loop tertutup
Waktu
naik
Overshoot
Waktu
turun
Kesalahan
keadaan
tunak
Proporsional
(Kp)
Menurun
Meningkat
Perubahan
kecil
Menurun
Integral (Ki)
Menurun
Meningkat
Meningkat
Hilang
Derivative (Kd)
Perubahan
Menurun
kecil
Menurun
Perubahan
kecil
Masing-masing kendali dapat bekerja dan diimplementasikan baik
secara terpisah maupun kombinasi secara bersamaan dengan tujuan
saling melengkapi diantara masing-masing karakteristik kendali tersebut.
Penjelasan untuk masing-masing kendali, berikut ini:
Pada aksi kendali proporsional, keluaran sistem kendali akan
berbanding lurus dengan masukan dan error, dan menghasilkan
tanggapan yang cepat. Akan tetapi overshoot meningkat sehingga sistem
cukup bermasalah terutama saat awal beroperasi.
Untuk kendali integral, keluaran sistem berubah dengan cepat
sesuai perubahan error, sehingga error steady state mendekati nol.
Sedangkan aksi kendali derivative bekerja sesuai dengan laju perubahan
error. Oleh karena itu, kendali ini berfungsi mereduksi laju perubahan error
sehingga menjaga kestabilan sistem. Dalam perancangan sistem kontrol
PID yang perlu dilakukan adalah mengatur parameter Kp, Ki dan Kd
supaya tanggapan keluaran sistem sesuai yang diinginkan.
21
Pengendali PID ini paling banyak dipergunakan karena sederhana
dan mudah dipelajari serta penalaan parameternya. Lebih dari 95 %
proses
di
industri menggunakan
pengendali
ini
(Sumiati, 2009).
Pengendali ini merupakan gabungan dari pengendali proportional (P),
integral (I), dan derivative (D).
Secara umum fungsi dari masing-masing kontroler dalam kontroler
PID adalah sebagai berikut (Purwanto, 2009):
a. Proportional
- Berfungsi untuk mempercepat terjadinya respons terhadap
sinyal error.
- Bekerja efektif pada daerah sebelum sistem mencapai daerah
set point / kondisi start.
b. Integral
- Berfungsi memelihara sinyal kontrol konstan.
- Bekerja efektif pada daerah di mana sistem mencapai set point.
c. Derivative
- Berfungsi mendapatkan sinyal kontrol dari perubahan errornya.
- Bekerja efektif pada daerah transient.
Berikut ini merupakan blok diagram dari sistem pengendali
berumpan balik (closed loop) seperti pada Gambar 7 berikut.
22
error
SP
PID
-
Plant
Output
PV
Sensor
Gambar 7. Diagram blok sistem pengendali berumpan balik
(Sukendar, 2007)
dimana :
Plant
: sistem yang akan dikendalikan
Controller : Pengendali yang memberikan respon untuk memperbaiki
respon
Error
: SP – PV
dengan Set Point (SP) adalah suatu parameter nilai referensi atau nilai
yang diinginkan. Present Value (PV) adalah variable terukur yang di
umpan balikan oleh sensor. Keluaran pengendali PID akan mengubah
respon mengikuti perubahan yang ada pada hasil pengukuran sensor dan
set point yang ditentukan. Pembuat dan pengembang pengendali PID
menggunakan nama untuk mengidentifikasi ketiga model pada pengendali
yaitu:
P (Kp) = Konstanta Proportional
1
Ki
i
s
I (Ki) = ∫ T S =
D (Kd) = Td
d e(t)
dt
= Konstanta Integral
= Konstanta Derivative
Atau secara umum persamaannya adalah sebagai berikut (Sumiati, 2009):
u(t) = K p . e(t) + Ki. ∫ e(t)dt + Kd.
(14)
d e(t)
dt
23
B. Metode Penalaan Ziegler Nichols
Metode penentuan parameter pengendali PID Ziegler Nichols
memiliki kelebihan dibandingkan dengan metode klasik. Salah satu
kelebihan
tersebut
adalah
tidak
ditekankannya
penurunan
model
matematik komponen yang akan diatur (plant).
Penalaan parameter pengendali PID selalu didasari atas tinjauan
terhadap karakteristik yang diatur (plant). Dengan demikian betapapun
rumitnya suatu plant, perilaku plant tersebut harus diketahui terlebih
dahulu
sebelum
penalaan
parameter
PID
itu
dilakukan.
Kerena
penyusunan model matematik plant tidak mudah, maka dikembangkan
suatu metode eksperimental. Metode ini didasarkan pada reaksi plant
yang dikenal suatu perubahan. Dengan menggunakan metode itu model
matematik
perilaku
plant
tidak
diperlukan
lagi,
karena
dengan
menggunakan data yang berupa kurva keluaran. Penalaan bertujuan
untuk mendapatkan kinerja sistem sesuai spesifikasi perancangan.
Cara menentukan PID berdasarkan metode penalaan ZieglerNichols dilakukan secara eksperimen (asumsi model belum diketahui).
Metode ini bertujuan untuk pencapaian maximum overshoot (MO) : 25 %
terhadap masukan step.
Metode open loop adalah metode pertama Ziegler-Nichols untuk
penalaan kendali PID (Zaidir, 2015) dengan memperoleh secara
eksperimen
tanggapan
menghasilkan kurva S.
plant
terhadap
masukan
unit-step
akan
24
Kurva bentuk S memiliki karakteristik dengan dua buah konstanta,
yaitu waktu tunda L dan konstanta waktu T. Kedua parameter tersebut
diperoleh dengan menggambar garis tangensial pada titik infleksi dari
kurva penalaan PID Ziegler Nichols dan memperoleh perpotongan garis
tangensial dengan garis axis waktu dan garis c(t) = K seperti pada
gambar 9.
Gambar 8. Tanggapan unit step (Zaidir, 2015)
Gambar 9. Kurva Penalaan PID Ziegler-Nichols (Zaidir, 2015)
Berdasarkan
kurva
penalaan
PID
diatas,
Zigler-Nichols
menentukan parameter Kp, Ti dan Td pada metode pertama berbasis
tanggapan undak open loop dirangkum pada Tabel 2. Untuk kendali PID
yang dirancang dalam paralel atau tiga aksi terpisah maka Ti dan Td harus
konversi untuk mendapatkan Ki dan Kd dengan rumus (Zaidir, 2015):
Ki =
Kp
Ti
(15)
25
Kd = Kp x Td
(16)
Berikut tabel perhitungan nilai PID:
Tabel 2. Aturan penalaan Ziegler Nichols open loop (Zaidir, 2015):
Tipe
Kp
Ti
Td
P
T/L
~
0
PI
0.9T/L
L/0.3
0
PID
1.2T/L
2L
0.5L
C. Root Mean Square (RMS)
Nilai Root Mean Square (RMS) adalah nilai akar rata-rata kuadrat
dari suatu besaran yang berubah sebagai fungsi waktu selama suatu
interval waktu t. Untuk perhitungan kesalahan pengukuran kecepatan
RMSE (Root Mean Square Error) dan perhitungan kesalahan pengukuran
tegangan jangkar RMS_Ea pada setiap waktu t dapat dilihat seperti pada
persamaan (17) dan (18).
RMSE (t)
1
2
error(t) dt
t
(17)
dimana error(t) = ωref – ω(t)
dengan ωref adalah suatu parameter nilai acuan atau nilai yang diinginkan
dari putaran nominalnya, sedangkan ω(t) adalah nilai pembacaan sensor
saat itu atau variabel terukur yang di umpan balikkan oleh sensor dari
kecepatan putar itu sendiri.
26
RMSEa(t)
1
2
errorEa(t) dt
t
(18)
dimana errorEa(t) = Earef – ea(t)
dengan Earef adalah suatu parameter nilai acuan atau nilai yang diinginkan
dari tegangan nominalnya, sedangkan ea(t) adalah nilai pembacaan
sensor saat itu atau variabel terukur yang di umpan balikkan oleh sensor
dari tegangannya itu sendiri.
D. Rancangan Penelitian
Proses perancangan sistem ini dilakukan beberapa tahap, antara
lain:
Start
Menentukan parameter PID yaitu Kp, Ki
dan Kd berdasarkan Ziegler Nichols
Penalaan pengendali PID berbasis
perhitungan nilai akar kuadrat rata-rata
Tidak
Validasi
plant
Ya
Selesai
Gambar 10. Diagram Alir Penelitian
27
BAB IV
PERANCANGAN DAN SIMULASI
A. Motor Arus Searah
Motor arus searah yang digunakan adalah motor arus searah
terkendali jangkar tipe 73186 class 0.3. Parameter motor arus searah
terkendali jangkar dalam simulasi diberikan pada Tabel 3.
Tabel 3. Parameter data motor DC Terkendali Jangkar
No
1
2
Parameter
Daya
Kecepatan putar
nominal
Simbol
Nilai
Satuan
P
0,3
KWatt
nom
2000
RPM
3
Tegangan Jangkar
Ea
220
Volt
4
Arus Jangkar
Ia
1,8
Ampere
5
Tahanan Jangkar
Ra
12
6
Induktansi Jangkar
La
0.0080
Hendry
7
Momen Inersia
J
0,177
Nmsec2/rad
Sumber: Motor DC Terkendali Jangkar Type 73186 class 0.3 pada
Laboratorium
Elektronika Daya Fakultas Teknik Jurusan
Teknik Elektro Universitas Hasanuddin.
Dari data-data yang ada diatas dapat dikonversi ke sistem MKS
dan menganalisis parameter lainnya. Adapun perhitungannya adalah
sebagai berikut:
1. Kecepatan nominal (nom)
nom = 2000 RPM x 2/60 = 209,440 rad/sec
28
2. Konstanta gesekan/friction (B)
B
T
ωnom
Dimana nilai T :
Tnom
Tnom
P(watt)
ω(rad/sec)
300
watt
209,440 rad/sec
Tnom 1,432
N.m/sec
rad
Tnom 1,432
kg.m 2
sec 2
Sehingga:
B
T
ω
B
1,432
Nm
209,440 rad/sec
B 6,837x10 3
Nm.sec
rad
B 6,837x10 3
kg.m 2
rad.sec
3. Konstanta motor (Km)
Km
T 1,432
N.m
0,796
Ia
1,8
Amp
29
4. Konstanta GGL lawan (Kb)
Kb
Ea Ia .R a 220 (1,8x12)
0,947
ω
209,440
Volt.sec
rad
Tabel 4. Parameter Motor DC Terkendali Jangkar dan hasil analisis
parameter lainnya:
No.
1.
Parameter
Simbol
Daya
P
2.
Kecepatan putar nominal
nom
3.
Tegangan Jangkar
5.
Nilai
Satuan
0,3
KWatt
2000
RPM
209,440
rad/sec
Ea
220
Volt
Arus Jangkar
Ia
1,8
Ampere
6.
Tahanan Jangkar
Ra
12
7.
Momen Inersia
J
0,177
Nmsec2/rad
B
6,837x10-3
Kg.m2/rad.sec
8.
Konstanta
gesekan/friction
9.
Konstanta motor
Km
0,796
N.m/Amp.
10.
Konstanta GGL lawan
Kb
0,947
Volt.sec/rad
11.
Torsi
T
1,432
Kg.m2/sec2
Sumber :
Motor DC Terkendali Jangkar Type 73186 class 0.3 pada
Laboratorium Elektronika Daya Fakultas Teknik Jurusan
Teknik Elektro Universitas Hasanuddin dan hasil analisis.
30
B. Motor DC Kendali Jangkar tanpa Gangguan
Pada kondisi ini motor dalam keadaan normal (steady state) dan
belum mengalami gangguan, seperti diperlihatkan pada gambar simulink
di bawah ini :
220
220*pi/sqrt(2)
220
Tegangan Jala2
1
1
s
time
Constant
Integrator
Waktu [sec]
AC In
Tegangan Jangkar
Alpha
Ea
VariAC
Tegangan Jangkar [Volt]
Penyearah Terkendali
1997
220
90
Tachometer
ea(t) [Volt]
alpha
Display
alpha
omega
w(t) [RPM]
Alpha
90
Display1
Putaran Motor [RPM]
0.007
B [N.m.sec/rad]
Beban Nominal
Arus Jangkar [Ampere]
ia(t) [Ampere]
0
arus
Ra-serie
Tidak ada Tambahan Rs
MOTOR DC
1.83
Amperemeter
Gambar 11. Model simulasi motor DC tanpa gangguan
Berdasarkan gambar simulasi motor DC tanpa gangguan (Gambar
11) diatas pada kecepatan motor ω(t) dan arus jangkar ia(t) hampir
mendekati nilai yang tertera pada name plate motor DC terkendali jangkar
yaitu kecepatan motor sekitar 2000 RPM dan arus jangkar sekitar 1,8
Ampere. Bila simulink diatas di jalankan maka akan terlihat grafik hasil
simulasi sebagai berikut :
31
Ea(t)[Volt]
221
220
219
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time [sec]
50
60
70
80
10
20
30
40
time [sec]
50
60
70
80
10
20
30
40
time[sec]
50
60
70
80
91
alpha [deg]
Ia(t) [Ampere]
0
90
89
200
0
-200
0
omega [RPM]
4
2
x 10
1
0
0
Gambar 12. Grafik hasil simulasi antara tegangan (Ea), kecepatan motor
(omega) alpha dan arus jangkar terhadap waktu tanpa
gangguan.
C. Motor DC Kendali Jangkar dengan Gangguan tanpa Pengendali
Pada kondisi motor dalam kondisi gangguan seperti diperlihatkan
pada gambar simulasi dibawah ini :
Waktu
(t)
Bagian
elektrik
Ea nom
Penghitung
RMS_Ea
Km
Kb
RMS_Ea (t)
Kecepatan (RPM)
Bagian
mekanik
Waktu
(t)
Penghitung RMSE (t)
RMSE
+
+
B nom
Gangguan beban
Gambar 13. Gambar bagan simulasi motor DC kondisi gangguan
tanpa pengendali
32
Perubahan kecepatan putaran motor arus searah terjadi seiring
dengan perubahan beban, artinya cepat atau lambatnya putaran motor
tergantung pada naik atau turunnya beban motor tersebut. Perubahan
beban itu sendiri kemudian disebut dengan gangguan (disturbance).
Walaupun ada gangguan yang terjadi namun kecepatan putaran
motor arus searah sedapat mungkin tetap berputar pada kecepatan
nominalnya. Sebagaimana yang telah dijelaskan diatas bahwa yang
dimaksud dengan kondisi gangguan adalah seberapa besar perubahan
beban yang diberikan ke motor yang berdampak pada perubahan
kecepatan motor arus searah.
Berdasarkan gambar simulasi motor DC tanpa pengendali (Gambar
13) diatas jika dijalankan diperoleh RMSE = 68,63 RPM dan RMS_Ea = 0,
B[kg.m2/rad.sec]Ea(t)[Volt]
alpha [deg]
dengan grafik hasil simulasi sebagai berikut.
221
220
219
omega [RPM] error[RPM]
arus[Ampere]
0.02
0.01
0
91
90
89
4
2
0
200
0
-200
2200
2000
1800
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time[sec]
50
60
70
80
Gambar 14. Grafik hasil simulasi antara tegangan, beban, alpha (sudut
penyalaan), arus jangkar, error dan kecepatan putar
terhadap waktu tanpa pengendalian.
33
Nilai besaran gangguan yang terjadi pada arus dan putaran motor
pada gambar grafik diatas :
a. Gangguan arus terendah mencapai 0,3396 Ampere
sedangkan
gangguan arus tertinggi mencapai 3,311 Ampere dari arus nominalnya
sebesar 1,8 Ampere.
b. Gangguan putaran terendah terjadi pada 1818 RPM sedangkan
gangguan putaran tertinggi mencapai 2177 RPM dari putaran
nominalnya sebesar 2000 RPM.
Untuk perhitungan RMSE dan RMS_Ea pada setiap waktu t dapat
dilihat seperti pada persamaan (17) dan (18).
RMSE(t)
1
t
error(t) dt
2
dimana error(t) = ωref – ω(t)
RMSEa(t)
1
t
errorEa(t)
2 dt
dimana errorEa(t) = Earef – ea(t)
Berdasarkan perhitungan pada persamaan (17) dan (18) jika
dijalankan tanpa pengendali diperoleh kesalahan pengukuran kecepatan
RMSE sebesar
68,63 RPM (3,4315 %) dan Kesalahan pengukuran
tegangan jangkar RMS_Ea tanpa pengendali 0. Kesalahan pengukuran
tegangan jangkar RMS_Ea = 0 krn tidak ada umpan balik.
34
D. Motor Arus Searah Kendali Jangkar Dengan Pengendalian Pada
Kondisi Gangguan (Closed loop Control)
Pengendali yang digunakan yaitu kendali Proporsional-IntegralDerivatif (PID). Diperlihatkan potongan grafik hasil simulasi kecepatan
motor arus searah terhadap kondisi gangguan tanpa pengendali seperti
Gambar 15.
K
0
L
T
Gambar 15. Potongan grafik hasil simulasi kecepatan motor terhadap
waktu dengan gangguan tanpa pengendalian.
Dari gambar grafik diatas diperoleh : L = 0,63 dan T= 1,89.
Sehingga diperoleh :
Kp = 1.2T/L
= 1.2 (1.89/0.63)
= 3.6
Ti = 2L
= 2 x 0.63
= 1.26
Ki = Kp / Ti
= 3.6 / 1.26
= 2.857
35
Td = 0.5L
= 0.5 x 0.63
= 0.315
Kd = Kp x Td
= 3.6 x 0.315
= 1.134
Dalam membuat pengendalian daur tertutup pada motor arus
searah terkendali jangkar, dapat dilihat pada model motor arus searah
yang telah dibuat sebelumnya dengan memposisikan saklar pada posisi
closed. Selengkapnya dapat dilihat pada gambar simulink berikut ini :
Waktu
(t)
AC
Tegangan
Jangkar
++
alpha
RMS_Ea (t)
Penghitung
RMS_Ea
Ea(t)
Km
Bagian
elektrik
d_alpha
Kecepatan (RPM)
Bagian
mekanik
Kb
Pengendali
Volt
Rasio
Tachometer
Waktu
(t)
Penghitung RMSE (t)
RMSE
RPM
+
+
B nom
Gangguan beban
Gambar 16. Gambar bagan simulink motor DC kondisi gangguan dengan
pengendali (closed loop control)
Bila motor arus searah closed loop control dengan inisialisasi
sistem PID : Pengendali Proporsional-Integral-Derivative (Kp = 3,6 ,
36
Ki = 2,857 , Kd = 1,134), maka diperoleh diperoleh kesalahan pengukuran
kecepatan RMSE sebesar 65,99 RPM (3,2995 %) dan kesalahan
pengukuran tegangan jangkar RMS_Ea sebesar 4,362 Volt (1,9827 %)
serta dihasilkan grafik tegangan, beban, alpha, error (selisih antara
kecepatan putar referensi dengan kecepatan putar yang terukur) dan
kecepatan putar seperti pada Gambar 17.
220
200
error[RPM]
omega [RPM]
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time[sec]
50
60
70
80
0.02
0.01
0
alpha [deg]
B[kg.m 2/rad.sec]
Ea(t)[Volt]
240
95
90
85
500
0
-500
2500
2000
1500
Gambar 17. Grafik hasil simulasi motor arus searah dengan
pengendali Kp = 3,6 , Ki = 2,857 dan Kd = 1,134
Dari Grafik hubungan kesalahan pengukuran kecepatan RMSE
(RPM) dengan penguatan K untuk K = 1 sampai K = 5 seperti pada
Gambar 18.
37
70
65
60
RPM
55
50
45
40
35
1
1.5
2
2.5
3
3.5
4
4.5
5
k
Gambar 18. Grafik hubungan kesalahan pengukuran kecepatan RMSE
(RPM) dengan penguatan K untuk K = 1 sampai K = 5
Dari grafik hubungan kesalahan pengukuran tegangan jangkar
RMS_Ea (Volt) terhadap penguatan K untuk K = 1 sampai K = 5 seperti
pada Gambar 19.
9
8.5
8
7.5
Volt
7
6.5
6
5.5
5
4.5
4
1
1.5
2
2.5
3
3.5
4
4.5
5
k
Gambar 19. Grafik hubungan kesalahan pengukuran tegangan
jangkar RMS_Ea (Volt) terhadap penguatan K untuk
K = 1 sampai K = 5
38
Dengan Kp = 3,6 , Ki = 2,857 , dan Kd = 1,134 sesuai penalaan
Ziegler-Nichols, maka untuk menentukan titik optimum dapat diambil
perpotongan dari grafik RMSE dan RMS_Ea dengan mengambil titik
minimum dari selisihnya seperti terlihat pada Gambar 20.
4
3.5
3
%
2.5
2
1.5
1
RMSE
RMSEa
Selisih
0.5
0
1
1.5
X: 1.94
Y: 0.003636
2
2.5
3
3.5
4
4.5
5
k
Gambar 20. Grafik hubungan RMSE (%), RMS_Ea (%) dan selisihnya
(%) terhadap penguatan K untuk K =1 sampai K = 5
Dari grafik seperti gambar 20 diatas dapat dianalisis :
1. Semakin besar nilai K maka RMSE semakin kecil dan RMS_Ea
semakin besar.
2. Titik optimum dari RMSE dan RMS_Ea berada pada titik minimum dari
selisihnya yaitu 0,0036 (K = 1,94 ,
RMSE = 57,9 RPM (2,8950 %) ,
RMS_Ea = 6,361 Volt (2.8914 %). Maka diperoleh nilai pengendali PID
tertala secara manual sebagai berikut:
Kp = 1,94 x 3,6 = 6,984
Ki = 1,94 x 2,857 = 5,543
Kd = 1,94 x 1,134 = 2,199
39
Bila motor arus searah closed loop control dengan inisialisasi
sistem dengan parameter PID hasil penalaan untuk Kp = 6,984 ,
Ki = 5,543 , Kd = 2,199 , maka diperoleh diperoleh kesalahan pengukuran
kecepatan RMSE sebesar 57,9 RPM (2,8950 %) dan kesalahan
pengukuran tegangan jangkar RMS_Ea sebesar 6,361 Volt (2.8914 %)
serta dihasilkan grafik tegangan, beban, alpha, error (selisih antara
kecepatan putar referensi dengan kecepatan putar yang terukur) dan
kecepatan putar seperti pada Gambar 21.
220
200
error[RPM]
omega [RPM]
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time [sec]
50
60
70
80
0
10
20
30
40
time[sec]
50
60
70
80
0.02
0.01
0
alpha [deg]
B[kg.m 2/rad.sec]
Ea(t)[Volt]
240
95
90
85
200
0
-200
2200
2000
1800
Gambar 21. Grafik hasil simulasi motor arus searah dengan pengendali
Kp = 6,984 , Ki = 5,543 , dan Kd = 2,199 hasil penalaan
Perbandingan RMSE tanpa pengendali, RMSE dengan pengendali
PID dengan metode Ziegler Nichols serta RMSE pengendali PID dengan
memperhitungkan RMS_Ea seperti diberikan pada tabel 5.
40
Tabel 5. Perbandingan RMSE tanpa pengendali, RMSE dengan
pengendali PID dengan metode Ziegler Nichols dan RMSE
dengan pengendali PID dengan memperhitungkan RMS_Ea.
RMSE
Tanpa Kendali
(%)
RMSE Dengan
Kendali PID
dengan metode
Ziegler Nichols(%)
RMSE Dengan
Kendali PID
dengan
Memperhitungkan
RMS_Ea (%)
3,4315
3,2995
2,8950
E. Penalaan Otomatis
Untuk menentukan parameter PID tertala dengan metode Ziegler
Nichols secara otomatis dengan memperhitungkan RMSE (RPM) dan
RMS_Ea (Volt) sebagai masukannya pada pengendali. Selengkapnya
dapat dilihat pada gambar bagan berikut ini,
Waktu
(t)
AC
Tegangan
Jangkar
++
alpha
RMS_Ea (t)
Penghitung
RMS_Ea
Ea(t)
Bagian
elektrik
d_alpha
Km
Kecepatan (RPM)
Bagian
mekanik
Kb
Volt
Rasio
Tachometer
Waktu
(t)
Penghitung
RMSE
RMSE (t)
RPM
Pengendali
+
+
B nom
Gangguan beban
Gambar 22. Gambar Bagan simulasi motor arus searah kondisi
gangguan dengan pengendali tertala.
41
Model subsistem pengendali tertala dari bagan simulasi motor arus searah
dapat dilihat pada gambar bagan berikut ini,
Referensi
Kecepatan (RPM)
Rasio
Tachometer
d_alpha
RMSE
+
_
Algoritma
Kendali
Saturasi
K
dari Tachometer
(Volt)
RMSE (RPM)
RMSEa (Volt)
Algoritma
Penalaan
delta_Kp
delta_Ki
delta_Kd
Gambar 23. Gambar subsistem pengendali tertala dari bagan
simulasi motor arus searah.
Bila motor arus searah closed loop control dengan inisialisasi
sistem dengan parameter PID tertala untuk k = 0,045 , maka diperoleh
gain K sebesar 2,663 seperti terlihat pada gambar 24 berikut,
2.8
2.6
X: 282.7
Y: 2.663
2.4
Gain K
2.2
2
1.8
1.6
1.4
1.2
1
0
50
100
150
200
250
300
time [sec]
Gambar 24. Grafik hasil simulasi motor arus searah dengan
pengendali tertala untuk k = 0,045
350
42
Dari grafik hasil simulasi motor arus searah dengan pengendali
tertala untuk k = 0,045 diperoleh gain K sebesar 2,663. Maka diperoleh
nilai pengendali PID tertala secara otomatis sebagai berikut:
Kp = 2,663 x 3,6 = 9,587
Ki = 2,663 x 2,857 = 7,608
Kd = 2,663 x 1,134 = 3,019
43
BAB V
KESIMPULAN
Dari hasil simulasi diatas dapat diambil beberapa kesimpulan :
1. Untuk kesalahan pengukuran kecepatan RMSE tanpa pengendali
68,63 RPM (3,4315 %), RMSE dengan pengendali PID dengan metode
Ziegler Nichols 65,99 RPM (3,2995 %) serta RMSE dengan pengendali
PID dengan memperhitungkan RMS_Ea 57,9 RPM (2,8950 %) selama
80 detik dan mengalami gangguan koefisien gesek sekitar 20 detik.
2. Kesalahan pengukuran tegangan jangkar RMS_Ea tanpa pengendali 0,
dengan pengendali PID dengan metode Ziegler Nichols sebesar
4,362 Volt (1,9827 %) serta dengan pengendali
PID dengan
memperhitungkan RMS_Ea sebesar 6,361 Volt (2.8914 %). Kesalahan
pengukuran tegangan jangkar RMS_Ea = 0 karena tidak ada umpan
balik.
3. Dari hasil pengendali PID tertala untuk Gain k = 2,663 diperoleh
Kp = 9,587 , Ki = 7,608 , dan Kd = 3,019. Dengan nilai Kp, Ki dan Kd
tersebut, sistem dapat berjalan dengan baik dengan mempertahankan
kecepatan putaran motor mendekati setpoint.
44
DAFTAR PUSTAKA
Pinem, A. 2009. Pengaturan Kecepatan Motor DC Dengan Integral Siklus
Kontrol (Aplikasi Pada Laboratorium Konversi Energi Listrik FTUSU) (Skripsi). Medan: Universitas Sumatera Utara.
Bobal, Vladimir. 1999. Self-Tuning PID Controller. Department of
Automatic Control, Faxculty of Technology Zlin: Proceedings of the
7th Mediterranean Conference on Control and Automation (MED99)
Haifa, Israel - June 28-30.
Purwanto E., Mukti W., & Soebagio. 2009. Pengembangan Metoda Self
Tuning Parameter PID Controller Dengan Menggunakan Genetic
Algorithm Pada Pengaturan Motor Induksi Sebagai Penggerak
Mobil Listrik, Seminar Nasional Aplikasi Teknologi Informasi, di
Yogyakarta 20 Juni.
Erwin, S. 2009. Kontrol Proporsional Integral Derivatif (PID) Untuk Motor
DC Menggunakan Personal Computer. Departemen Teknik Elektro
Institut Teknologi Telkom Bandung.
Harifuddin. 2008. Pemodelan dan Pengendalian Motor DC Terkendali
Jangkar. Jurnal MEDIA ELEKTRIK, Volume 3 Nomor 1, Juni.
Ogata K. 1991. Teknik Kontrol Automatik –terjemahan: Ir. Edi Laksono,
Jakarta:Erlangga.
Tatang S & Berayan M. 2007. Sistem Pengaturan Motor AC Servo
Dengan Kontroller PID Self Tuning Berbasis Fuzzy Logic. Jurnal
DiSainTek Vol. 01, No. 01, Desember.
Thomas N & Poongodi P. 2009. Position Control of DC Motor Using
Genetic Algorithm Based PID Controller. Proceedings of the World
Congress on Engineering Vol II WCE 2009, London, U.K – July 1-3.
Ruzita S. 2009. Analisis Pengendalian Motor DC Menggunakan Logika
PID Dengan Mikro Kontroler ATMEGA 8535. Jurnal Teknik Mesin
Vol. 6, No. 2, Desember.
Zaidir J. 2015. Implementasi Kendali PID Penalaan Ziegler Nichols
Mengunakan Mikrokontroler. Jurnal Informatika, Vol.15, No.1, Juni.
45