bab iii analisa dan perancangan
advertisement

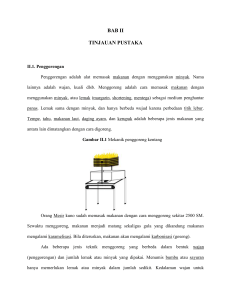
BAB III ANALISA DAN PERANCANGAN III.1. Analisa Masalah Dalam perancangan dan implementasi alat perajang dan penggorengan kentang otomatis berbasis mikrokontrolermenggunakan beberapa metode rancang bangun yang pembuatannyaterdapat beberapa masalah yang harus dipecahkan. Permasalahan-permasalahan tersebut antara lain : a. Perajang kentang Masalah awal dalam perancangan alat perajang kentang, dimana sebuah kentang harus masuk satu persatu untuk dirajang persegi empat memanjang. b. Tingkat kematangan kentang Masalah yang kedua yaitu dalam proses penggoreng kentang yang sudah dirajang harus benar – benar matang atau layak dikonsumsi. c. Pemindahan kentang dari tempat perajangan ke tempat penggorengan Masalah yang terakhir proses pemindahan kentang harus tepat pada posisi baik pada posisi penampung kentang yang sudah dirajang maupun tempat penggoreng(wajan). Pergerakkan tersebut menggunakan motordc yang di kontrol oleh IC untuk menentukan posisi yang sudah di tentukan. III.2. Strategi Pemecahan Masalah Ada beberapa permasalahan yang terjadi dalam perancangan dan implementasi alat perajang dan penggorengan kentang otomatis berbasis mikrokontroler, maka dibutuhkan solusi atau pemecahan masalah, antara lain: 1. Dengan merancang mata pisau secara vertikal dan horizontal secara sejajar maja kita dapat merajang kentang yang berukuran persegi empat memanjang dan dengan dilengkapi sebuah motor penggerak kita dapat mengorong kentang kearah mata pisau. 2. Dengan memanfaatkan sensor suhu lm35 kita bias mengetahui suhu dari minyak yang di panaskan oleh kompor. III.3. Identifikasi Kebutuhan Adapun identifikasi kebutuhan dari simulasi perancangan dan implementasi alat perajang dan penggorengan kentang otomatis berbasis mikrokontroleryang akan dirancang yaituanalisis kebutuhan softwaredan analisis kebutuhan hardware. III.3.1 Kebutuhan Perangkat Keras (Hardware) yang Digunakan Dalam perancangan dan implementasi alat perajang dan penggorengan kentang otomatis berbasis mikrokontroler, membutuhkan perangkat keras (hardware) yang mempunyai spesifikasi minimal sebagai berikut: 1. LaptopProccessor Intel Core I3. 2. Memory2.00GB 3. Harddisk500GB 4. Monitor dengan resolusi 1366 x 768pixel. III.3.2 Kebutuhan Desain yang Digunakan Adapun kebutuhan perangkat antara lain : 1. Kompor listrik 700 Watt. 2. Pisau perajang 3. Motor DC 4. kabel pelangi 5. Sensor Suhu LM35 6. Alummunium 7. Acrilic 8. Lem 9. Solder 10. Timah 11. Papan PCB 12. Buzzer 13. Beberapa baut dan mur 14. LCD 16 x 2 15. Limit III.3.3 Kebutuhan Perangkat Lunak (Software) yang Digunakan Adapun perangkat lunak (software) yang dibutuhkan dalam perancangan dan implementasi alat perajang dan penggorengan kentang otomatis berbasis mikrokontroler, membutuhkan dalam pembuatan program pada sistem operasi MS-Windows2000/XP/Vista/7. Dan dalam perancangan ini juga menggunakan aplikasi CodeVision AVR adalah program C compiler berbasis windows untuk mikrokontroler keluarga AVR. III.4. Diagram Blok Rangkaian Secara garis besar, perancangan dan implementasi alat perajang dan penggorengan kentang otomatis berbasis mikrokontrolerini terdiri dari sensor suhu LM35, Driver motor, Kompor listrik, motorDC, LCD 16x2, minimum sistem Mikrokontroler ATMega8535. Diagram blok dari simulasi perancangan dan implementasi alat perajang dan penggorengan kentang otomatis berbasis mikrokontrolerditunjukkan pada gambar III.1. BUZZER Sensor suhu LCD 16x2 LIMIT Driver Motor TOMBOL ATmega 8535 Motor CD Perajang MotorDC untuk memindahkan kentang yang sudah dirajang dan yang sudah di goreng Gambar III.1. Diagram Blok Rangkaian 1. Minimum sistem ATMega8535 merupakan pusat kendali dari seluruh rangkaian 2. Sensor Suhu LM35 berfungsi sebagai pengukur Suhu pada minyak goreng. 3. Tombol berfung untuk Start alat. 4. Buzzer berfung sebagai memberi tanda kentang sudah selesai di goring. 5. Deriver motor yang di pasang berfungsi untuk mengatur laju kecepatan potaran motor hal tersebut digunakan untuk keakuratan posisi penampung maupun pada saat menggoreng. 6. Limit digunakan untuk mengintruksikan pada atmega dimana posisi penampung kentang. 7. LCD 16x2 sebagai tampilan media data secara hardware. III.5. Sensor Suhu LM35 Sensor suhu IC LM 35 merupkan chip IC produksi Natioanal Semiconductor yang berfungsi untuk mengetahui temperature suatu objek atau ruangan dalam bentuk besaran elektrik, atau dapat juga di definisikan sebagai komponen elektronika yang berfungsi untuk mengubah perubahan temperature yang diterima dalam perubahan besaran elektrik. Sensor suhu IC LM35 dapat mengubah perubahan temperature menjadi perubahan tegangan pada bagian outputnya. Sensor suhu IC LM35 membutuhkan sumber tegangan DC +5 volt dan konsumsi arus DC sebesar 60 µA dalam beroperasi.Bentuk fisik sensor suhu LM 35merupakan chip IC dengan kemasan yang berfariasi. Bentuk fisik sensor LM35 bisa dilihat pada gambar.III.2. Gambar III.2. Bentuk Fisik Sensor LM35 Sumber : (http://elektronika-dasar.web.id/sensor-suhu-ic-lm35/) Dari gambar diatas dapat diketahui bahwa sensor suhu IC LM35 pada dasarnya memiliki 3 pin yang berfungsi sebagai sumber supply tegangan DC +5 volt, sebagai pin output hasil penginderaan dalam bentuk perubahan tegangan DC pada Vout dan pin untuk Ground. Karakteristik Sensor suhu IC LM35 adalah : Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius. Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC seperti terlihat pada gambar 2.2. Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC. Bekerja pada tegangan 4 sampai 30 volt. Memiliki arus rendah yaitu kurang dari 60 µA. Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam. Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA. Memiliki ketidaklinieran hanya sekitar ± ¼ ºC. Sensor suhu IC LM35 memiliki keakuratan tinggi dan mudah dalam perancangan jika dibandingkan dengan sensor suhu yang lain, sensor suhu LM35 juga mempunyai keluaran impedansi yang rendah dan linieritas yang tinggi sehingga dapat dengan mudah dihubungkan dengan rangkaian kontrol khusus serta tidak memerlukan seting tambahan karena output dari sensor suhu LM35 memiliki karakter yang linier dengan perubahan 10mV/°C. Sensor suhu LM35 memiliki jangkauan pengukuran -55ºC hingga +150ºC dengan akurasi ±0.5ºC. Tegangan output sensor suhu IC LM35 dapat diformulasikan sebagai berikut : Vout LM35 = Temperature º x 10 mV Sensor suhu IC LM 35 terdapat dalam beberapa varian sebagai berikut : LM35, LM35A memiliki range pengukuran temperature -55ºC hingga +150ºC. LM35C, LM35CA memiliki range pengukuran temperature -40ºC hingga +110ºC. LM35D memiliki range pengukuran temperature 0ºC hingga +100ºC. LM35 Kelebihan dari sensor suhu IC LM35 antara lain : Rentang suhu yang jauh, antara -55 sampai +150ºC Low self-heating, sebesar 0.08 ºC Beroperasi pada tegangan 4 sampai 30 V Rangkaian menjadi sederhana Tidak memerlukan pengkondisian sinyal. III.6. Deriver Motor Driver motor merupakan suatu rangkaian khusus yang memiliki fungsi untuk mengatur arah ataupun kecepatan pada motor DC. Perlunya rangkaian driver motor ini dikarenakan pada umumnya suatu motor DC membutuhkan arus lebih dari 250mA untuk beberapa IC contohnya NE555, ATMEGA 16 dan IC seri 74 tidak bisa memberikan arus lebih dari nilai tersebut. Jika motor langsung dihubungkan ke IC, maka hal ini akan menyebabkan kerusakan pada IC tersebut. Beberapa contoh driver motor yang akan dibahas yaitu tipe IC : L298D & L293D, tipe transistor : BJT dan MOSFET dan relay. III.6.1 Prinsip Kerja Driver Motor Bentuk rangkaian driver motor yang umum digunakan yaitu H-Bridge. Berbentuk seperti huruf H yang memiliki perbedaan fungsi di setiap sisinya. Prinsip sederhana dari pergerakan rangkaian driver motor DC ini bias dilihat pada gambar III.3. Gambar III.3. Prinsip kerja Driver Motor Sumber :(http://www.geyosoft.com/2014/merancang-driver-motor-dc) Pada gambar III.3 driver motor yang digunakan yaitu Transistor Bipolar (BJT). Motor akan bergerak forward atau searah jarum jam apabila transistor pada sebelah kiri atas dan kanan bawah aktif (high) serta transistor kiri bawah dan kanan atas tidak aktif (low). Pada kondisi ini kutub positif pada motor DC mendapatkan tegangan sumber dan kutub negatifnya terhubung dengan ground sehingga ada perbedaan potensial yang menyebabkan motor berputar. Untuk pergerakan berlawanan jarum jam (reverse) kebalikan dari seluruh kondisi pada keadaan forward. III.7. Perancangan MinimumSistem Mikrokontroler ATMEGA8535 Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Komponen utama dari rangkaian ini adalah IC mikrokontrolerATMega8535. Dalam IC mikrokontroler ATMega8535 terdapat rangkaian ADC yang dapat mengkonversi data-data analog menjadi datadata digital. IC mikrokontroler ATMega8535 ini juga memiliki kapasitas memori yang cukup besar. Pada IC inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki.Mikrokontroler memiliki 4 port I/O dengan data yang berbeda-beda, yaitu port A (PA0…PA7) merupakan pin I/O dua arah dan pin masukan catu ADC, Port B (PB0…PB7) merupakan pin I/O dua arah dan pin fungsi khusus yaitu Timer/Counter, komparator analog, dan SPI, Port C (PC0…PC7) merupakan pin I/O dua arah dan pin fungsi khusus TWI, komparator analog dan Timer Oscillator, Port D (PD0…PD7) merupakan pin I/O dua arah dan pin fungsikhusus yaitu komparator analog, Interupsi ekternal, dan komunikasi serial. Pin 9 digunakan untuk reset yang dihubungkan dengan pin 10 (VCC). XTAL1 dan XTAL2 (pin 12 dan 13) merupakan pin masukan clock internel, nilai Kristal akan mempengaruhi kecepatan Mikrokontroler dalam mengeksekusi suatu perintah tertentu. Pin 10 dihubungkan dengan VCC 5Volt dan pin 11 di ground. Pada pin 9 dihubungkan dengan sebuah kapasitor 22 uF yang dihubungkan ke positif dan sebuah resistor 10 Kohm yang dihubungkan ke ground. Keduan komponen ini berfungsiagar program pada mikrokontroler dijalankan beberapa saat setelah power aktif. Pada umumnya,mikrokontroler membutuhkan tiga elemen utama yaitu power supply, kristal osilator (XTAL), dan reset. Analogi fungsi kristal osilator (clock) yaitu untuk memompa data. Fungsi rangkaian RESET adalah untuk membuat mikrokontroler memulai kembali pembacaan program dengan kondisi aktif low atau ketika diberi logika 0. Hal tersebut dibutuhkan pada saat mikrokontroler mengalami gangguan dalam eksekusi program. Sistem kendali yang digunakan pada pembuatan alat ini adalah mikrokontroler jenis ATMega8535 dengan dilengkapi 40 port yang bisa digunakan sebagai input maupun output. Mikrokontroler jenis ATMega8535 memiliki fitur ADC dan PWM. Rangkaianminimumsistem Mikrokontroler ATMega8535 dapat dilihat pada gambar III.4 : Gambar III.4. SkematikMiminumSystem Mikrokontroler ATMega8535 Tersedia 4 bagian besar PORT pada mikrokontroler ATMega8535 yaituPORTA (0-7), PORTB (0-7), PORTC (0-7), dan PORTD (0-7). Pada tabel III.4dapat dilihat konfigurasi pin yang digunakan : Tabel III.1. Konfigurasi Pin Pada ATMega8535 Nama Pin No.Pin Fungsi Keterangan XCK/T0 (PORTB.0) 1 Output LCD(RS) T1 (PORTB.1) 2 Output LCD(RW) INT2/AIN0(PORTB.2) 3 Output LCD(E) OC0/AIN1(PORTB.3) 4 Output LCD(DB4) SS (PORTB.4) 5 Output LCD(DB5) MOSI (PORTB.5) 6 Output LCD(DB6) MISO (PORTB.6) 7 Output LCD(DB7) SCK (PORTB.7) 8 Input Tombol Start ADC4 (PORTA.0) 40 Input SENSOR Suhu LM35 OC1B (PORTD.4) 18 Output PWM Driver Motor OC1A (PORTD.5) 19 Output PWM Driver Motor INT1(PORTD.3) 17 Output Driver Motor ICP1(PORTD.6) 20 Output Driver Motor RXD(PORTD.0) 14 Output Rilay Tabel III.1. Konfigurasi Pin Pada ATMega8535 Nama Pin TXD(PORTD.1) No.Pin Fungsi 15 Output Keterangan Rilay III.8. Perancangan rangkaian Downloader Perancangan sistem pengendalian listrik secara bergantian menggunakan metode random bersyaratini akan menggunakan downloader untuk memasukkan data program dari komputer ke mikrokontroler ATMega8535. AVR USB Downloader memiliki interface USB untuk memudahkan dalam memprogram mikrokontroler melalui laptop menggunakan portparalel sebagai downloadernya. Downloader ini menggunakan USB sebagai penghubungnya.Ini merupakan rangkaian USBasp downloader yang berfungsi untuk memasukkan program ke rangkaian minimum sistem ATMega8535. Rangkaian downloaderdapat dilihat pada gambar III.4. Gambar III.5. Skematik USB Downloader Sumber : http://www.fischl.de/usbasp Rangkaian ini menggunakan chip ATMEGA8 yang diprogram khusus sebagai media untuk memasukkan data file.hexyang akan disikan ke mikrokontroler ATMega8535. III.9. Flowchart Agar dapat melihat struktur jalannya program maka dibuat flowchart (diagram alur). Flowchart digunakan sebagai dasar acuan dalam membuat program. Struktur program akan lebih mudah dibuat atau didesain.Selain itu juga jika terdapat kesalahan akan lebih mudah untuk mendeteksi letak kesalahannya serta untuk lebih memudahkan dalam menambahkan instruksiinstruksi baru pada program jika nantinya terjadi pengembangan pada struktur programnya. Gambar III.6.Flowchart hardware III.10. Algoritma Flowchart hardware 1. Start. 2. Inisialisasi Perangkat, ini dimaksudkan apakah perangkat sudah terpasang dengan benar sesuai dengan skematik rangkaian. 3. Hidupkan perangkat, dengan memberikan tegangan pada rangkaian dan mulai memanaskan kompor. 4. Masukkaan kentang pada penampung untuk nantinya akan secara otomatis dirajang berukuran persegi4 memanjanag. 5. Proses selanjutnya adalah melakukan pemberian data input dari tombol . 6. Mikrokontroler akan mendeteksi data dari inputanlalu motor akan bekerja setelah kentang sudah pada posisi yang sebenarnya untuk dirajang. 7. Setelah proses perajangan pada kentang, penampung kentang akan menunggu sampai minyak yang sudah di panaskan benar pada suhu yang sudah di tetapkan. 8. Pada lcd 16*2 akan selalu menampilkan kondisi pada suhu minyak goreng. 9. Jika sensor suhu > 80 % maka motor penampung kentang akan bergerak pada posisi yang sebenarnya untuk memasukkan kentang ke dalam penggorengan. 10. Jika kentang sudah matang penampung kentang akan memindahkan ke tempat penirisan untuk kengurangi kadar minyak pada kentang. 11. Perangkat akan berada pada posisi standbyatau posisi dimana perangkat terus menerus membaca data inputan tombol hingga terjadi perubahan data. 12. Finish