BAB II TINJAUAN PUSTAKA 2.1 Pengenalan Hardware Pengenalan
advertisement

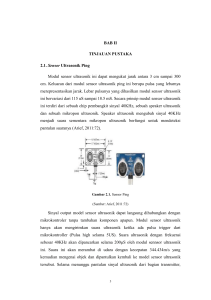
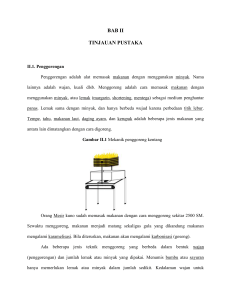
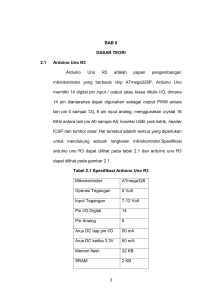
BAB II TINJAUAN PUSTAKA 2.1 Pengenalan Hardware Pengenalan hardware ini dimaksud sebagai referensi bagimana output suatu hardware sebagai input ke mikrokontroler apakah berupa sinyal analog atau digital. Adapun hardware yang digunakan dalam perancangan kursi roda ini adalah Mikrokontroler ATMega 16, Sensor Ultrasonik, Motor DC, Motor Servo, IC L293D, IC LM7805,LCD, dan Baterai Lippo. 2.1.1 Kursi roda Kursi roda adalah alat bantu yang digunakan oleh orang yang mengalami kesulitan berjalan menggunakan kaki, baik dikarenakan oleh penyakit, cedera, maupun cacat. Alat ini bisa digerakan dengan didorong oleh pihak lain, digerakan dengan menggunakan tangan, atau dengan menggunakan mesin otomatis. Pemakaian pertama kursi roda di Inggris tercatat pada tahun 1670-an. 2.1.2 Jenis – jenis Kursi Roda 1. Kursi roda manual Adalah kursi roda digerakkan dengan tangan si penderita cacat, merupakan kursi roda yang biasa digunakan untuk semua kegiatan. Kursi roda manual dapat dioperasikan dengan bantuan orang lain maupun oleh penggunanya sendiri. Kursi roda seperti ini tidak dapat dioperasikan oleh penderita cacat yang mempunyai kecacatan ditangan juga. Kursi roda manual yang ada di Indonesia ada yang buatan lokal dan ada kursi roda import. 2. Kursi roda listrik Merupakan kursi roda yang digerakkan dengan motor listrik biasanya digunakan untuk perjalanan jauh bagi penderita cacat atau bagi penderita cacat ganda sehingga tidak mampu untuk menjalankan sendiri kursi roda, untuk menjalankan kursi roda mereka cukup dengan menggunakan tuas seperti joystick 5 6 untuk menjalankan maju, mengubah arah kursi roda belok kiri atau belok kanan dan untuk mengerem jalannya kursi roda. Biasanya kursi roda listrik dilengkapi dengan alat untuk mengecas/mengisi ulang aki/baterainya yang dapat terus dimasukkan dalam stop kontak dirumah/bangunan yang dikunjungi. 3. Kursi roda untuk sport Kursi roda manual untuk kegiatan olah raga, pada balapan kursi roda yang direncanakan untuk berjalan dengan cepat dibutuhkan upaya untuk meningkatkan kestabilan dengan menggunakan tambahan 1 roda di depan seperti trike (sepeda roda tiga). Merupakan perangkat yang umum ditemukan dalam pekan olah raga/olimpiade bagi penderita cacat. 4. Kursi roda untuk anak Kursi roda yang di desain khusus untuk anak-anak, kursi roda yang satu ini memiliki ukuran yang lebih kecil dibandingkan lainnya. Masalah kegunaan serta fungsinya tentu tidak jauh berbeda dengan produk kursi roda yang lainnya. Biasanya desain menggunakan warna yang cerah sesuai peruntukannya. Salah satu ciri khas kursi roda anak adalah dimensi dudukannya selalu dibawah 50 cm (Wikipedia, 2015). 2.2 Sistem Kendali Sistem Kendali adalah suatu sistem yang bertujuan untuk mengendalikan suatu proses agar output yang dihasilkan dapat dikontrol sehingga tidak terjadi kesalahan. Dalam hal ini outpiut yang dikendalikan adalah sistem navigasi. Sistem kendali yang digunakan adalah remote kontrol. 2.2.1 Remot Kontrol Remote Kontrol atau yang biasa disebut pengendali jarak jauh merupakan sebuah alat elektronik yang digunakan untuk mengoperasikan sebuah mesin dari jarak jauh. Istilah remote kontrol juga sering disingkat menjadi remot saja. Remot juga sering mengacu pada istilah controller, donker, donker, doofer, zapper, click-buzz, box, flipper, zippity clicker atau changer. Pada umumnya, 7 pengendali jarak jauh digunakan untuk memberikan perintah dari kejauhan kepada televisi atau barang-barang elektronik lainnya seperti sistem stereo dan pemutar DVD. Remot kontrol untuk perangkat-perangkat ini biasanya berupa benda kecil nirkabel yang digenggam dengan sederetan tombol untuk menyesuaikan berbagai setting, seperti misalnya saluran televisi, nomer trek dan volume suara. Pada kebanyakan peranti modern dengan control seperti ini, remot kontrolnya memiliki segala kontrol fungsi sementara perangkat yang dikendalikan itu sendiri hanya mempunyai sedikit kontrol utama yang mendasar. Kebanyakan remot berkomunikasi dengan perangkatnya masing-masing melalui sinyal-sinyal infra merah dan beberapa saja melalui sinyal radio. Remot kontrol biasanya menggunakan baterai AAA yang kecil atau AA sebagai satu dayanya. (Sumber: Hijriyanthi W, 2014:3) 2.2.2 Radio Frequency PT2262 (Encoder) PT2262 adalah penyandi digital untuk pengendali nirkabel (remote control encoder) yang dikembangkan dengan teknologi CMOS. IC ini akan menyandikan pin-pin data dan alamat tujuan dalam bentuk serial coded waveform yang cocok digunakan untuk modulasi RF (radio frequency) dan IR (infrared / infra merah). Pasangan/komplemen dari IC ini adalah PT2272 Remote Control Decoder yang berfungsi sebagai pengurai sandi (decoder) signal yang disandikan oleh PT2262. Remote RF sering digunakan pada pengendali jarak jauh tanpa kabel (remote control) dengan menggunakan Amplitude Shift Keying (ASK). Frekuensi yang digunakan pada proses pengiriman dan penerimaan harus sama agar tidak adanya kegagalan komunikasi yaitu sebesar 315 MHz. Radio Frequensi (RF) mempunyai frekuensi sinyal dari 300 MHz sampai dengan 3 GHz (3.000 MHz). Gambar 2.1 Konfigurasi Pin PT2262 8 Tabel 2.1 Keterangan Pin PT2262 Nama Pin I/O Deskripsi Pin# Pin masukan kode alamat A0..A5 A0..A5 I Setiap pin dapat diset ke "0", "1", atau "f" 1–6 (mengambang, floating) Pin masukan kode alamat A6..A11 atau pin data #5..#0 A6/D5 ~ Saat digunakan untuk kode alamat, setiap pin dapat diset ke I "0", "1", atau "f" (mengambang, floating). Apabila A11/D0 digunakan untuk data, pin ini hanya bisa diset ke "0" atau "1". OSC1 O Pin Oscillator no. 1 Sebuah resistor 7-8 dan 10 13 15 yang menghubungkan kedua pin ini OSC2 I Pin Oscillator no. 2 menentukan 16 frekuensi fundamental dari PT2262 Pin keluaran (Data Output Pin) DOUT O Setiap pin dapat diset ke "0", "1", atau "f" 17 (mengambang, floating) Pin sumber daya, hubungkan dengan positive power VCC - VSS - Hubungkan pin ini dengan ground (GND) supply (4 hingga 15 Volt) 18 9 Di dalam IC PT2262 terdapat rangkaian encoder yang berfungsi untuk mengubah sinyal seperti data atau bitstream ke dalam bentuk yang dapat diterima untuk transmisi data atau penyimpanan data yang kemudian transmisi data tersebut 9 akan diterima oleh penerima (receiver) RF (Indoware, 2015). 2.2.2 Radio Frequency PT2272 (Decoder) PT2272 adalah decoder Remote Control yang bekerja berpasangan dengan IC PT2262 (remote control encoder) digunakan untuk menerima sinyal dari transmitter Sebuah penerima (receiver) RF menggunakan beberapa komponen pendukung untuk menerima sinyal yang dikirimkan pemancar RF salah satunya yaitu antena. Antena biasanya digunakan untuk menerima sinyal radio frekuensi yang harus diubah menjadi osilasi listrik dan kemudian diperkuat. Peralatan deteksi juga digunakan untuk demodulasi dan dalam kasus penerima radio frekuensi. (Indoware, 2015). Gambar 2.2 Konfigurasi PIN PT2272 Tabel 2.2 Keterangan Pin PT2272 Nama PIN I/O Deskripsi Kode Alamat Pin Nos 0 -. 5. AO - A5 I Keenam pin tri-state terdeteksi oleh PT2272 untuk menentukan dikodekan gelombang bit 0 - bit 5. Setiap pin dapat diatur untuk "O", "1", atau "f '(floatinq). No. Pin 18pins 20pins 1 – 6 1-6 10 Kode Alamat Pin No 6 -.. 11 / Data Pin Nos 5 - 0 Keenam pin digunakan sebagai tinggi bit alamat input atau pin data output tergantung pada versi (jenis) dari PT2272 digunakan. A6/D5 A11/D0 I/O Ketika digunakan sebagai input alamat, pin ini adalah pin 7 __ 8 input tri-state dan setiap pin dapat diatur untuk "O", "1", atau 10 – 13 7 __ 8 12 - 15 "f '(floating). Ketika digunakan sebagai pin output, pin ini didorong untuk VCC jika (1) alamat diterjemahkan dari gelombang yang diterima sesuai alamat pengaturan pada pin alamat input, dan Data Input (2) data bitPin. yang sesuai diterima adalah "1" bit . Jika tidak, DIN I Gelombang dikodekan mereka didorong untukditerima VSS. serial diumpankan ke 14 16 15 17 16 18 17 19 PT2272 pada pin ini. Sebuah resistor OSC 1 I Osilator Pin No.1 OSC 2 0 Osilator Pin No. 2 dihubungkan antara kedua pin menentukan frekuensi dasar PT2272. Valid Transmission. VT O Aktif tinggi Signal. VT dalam keadaan tinggi menandakan bahwa PT2272 menerima gelombang transmisi valid. VCC - Positive Power Supply 18 20 VSS - Neqative Power Supply 9 9 NC - No Connection - 10-11 11 2.3 Sensor Sensor adalah alat yang mengukur suatu nilai fisik untuk kemudian dijadikan suatu sinyal yang bisa terbaca oleh sistem. Ada beberapa jenis sensor yang digunakan untuk mengukur dan mengetahui berbagai parameter penting diantaranya parameter jarak, parameter posisi, dan seterusnya. 2.3.1 Sensor Jarak/Ultrasonik Sensor Jarak dapat diartikan sebagai sensor yang berfungsi untuk mengukur serta mengetahui letak dari suatu objek yang berbeda jaraknya. Sensor untuk mengetahui jarak ini pada perkembangannya memiliki dua kelompok, yang pertama adalah sensor ultrasonic dan yang kedua adalah sensor infamerah. Sensor ultrasonic untuk mengukur jarak dihasilkan dari gelombang ultrasonic yang dipancarkan atau dikeluarkan oleh transmitter atau alat pemancar gelombang ultrasonik,transmitter 2.3.1.1 Cara Kerja Sensor Ultrasonik Speaker ultrasonik mengubah sinyal 40 KHz menjadi suara sementara mikropon ultrasonik berfungsi untuk mendeteksi pantulan suaranya. Sinyal output modul sensor ultrasonik dapat langsung dihubungkan dengan mikrokontroler tanpa tambahan komponen apapun. Modul sensor ultrasonik hanya akan mengirimkan suara ultrasonik ketika ada pulsa trigger dari mikrokontroler (Pulsa high selama 5μS). Suara ultrasonik dengan frekuensi sebesar 40KHz akan dipancarkan selama 200μS oleh modul sensor ultrasonik ini. Suara ini akan merambat di udara dengan kecepatan 344.424m/detik (atau 1cm setiap 29.034μS) yang kemudian mengenai objek dan dipantulkan kembali ke modul sensor ultrasonik tersebut. Selama menunggu pantulan sinyal ultrsonik dari bagian trasmiter, modul sensor ultrasonik ini akan menghasilkan sebuah pulsa. Pulsa ini akan berhenti (low) ketika suara pantulan terdeteksi oleh modul sensor ultrasonik. Oleh karena itulah lebar pulsa tersebut dapat merepresentasikan jarak antara modul sensor ultrasonik dengan objek. (Fahmizal, 2015:1) 12 Gambar 2.3 Sensor Ultrasonik (Fahmizal, 2015:1) 2.4 Mikrokontroler Mikrokontroler adalah sebuah sistem komputer yang seluruh atau sebagian besar elemennya dikemas dalam satu keping IC (Integrated Circuits) sehingga sering disebut mikrokomputer cip tunggal. Lebih lanjut, mikrokontroler merupakan sistem komputer yang mempunyai satu atau beberapa tugas yang sangat spesifik, berbeda dengan Personal Computer (PC) yang memiliki beragam fungsi (Suyadhi, 2010:264). Pemrograman mikrokontroler merupakan dasar dari prinsip pengontrolan kerja robot, dimana orientasi dari penerapan mikrokontroler adalah untuk mengendalikan suatu sistem berdasarkan informasi input yang diterima, yang kemudian diproses oleh mikrokontroler (Budiharto, 2010:77). Berbeda dengan CPU serbaguna, mikrokontroler tidak selalu memerlukan memori eksternal sehingga mikrokontroller dapat dibuat dengan biaya yang lebih murah dalam kemasan yang lebih kecil dengan jumlah pin yang lebih sedikit. Umumnya, sebuah cip mikrokontroler memiliki fitur-fitur berikut : 1. Central Processing Unit (CPU), mulai dari prosesor 4-bit yang sederhana hingga prosesor kinerja tinggi 64-bit. 2. Input/Output (I/O) antarmuka jaringan, seperti portal serial (UART) dan portal paralel. 3. Antarmuka komunikasi serial lain, seperti I2C, Serial Peripheral Interface, dan Controller Area Network untuk sambungan sistem. 4. Periferal, seperti pewaktu/timer dan watchdog. 13 5. RAM untuk penyimpanan data. 6. ROM, EPROM atau memori kilat untuk menyimpan program komputer. 7. Pembangkit jam/clock, biasanya berupa resonator rangkaian RC 8. Analog to Digital Converter (ADC). (Suyadhi, 2010:263). 2.4.1 Mikrokontroler ATMEGA16 Mikrokontroler yang terkenal dan mudah didapatkan di Indonesia saat ini salah satunya ialah AVR ATMega16. Mikrokontroler ini memiliki beberapa port yang dapat digunakan sebagai I/O (Input/Output). Gambar berikut adalah gambar dari mikrokontroler ATMega16 yang memiliki 40 pin. Gambar 2.4 Bentuk Fisik Mikrokontroler ATMega16 (Setiawan, 2011 : 4) 2.4.1.1 Konfigurasi Pin ATMega16 Konfigurasi pin mikrokontroler ATMega16 untuk 40 pin DIP (dual in line package) ditunjukkan pada Gambar 2.2. 14 Gambar 2.5 Konfigurasi Pin ATMega16 (Setiawan, 2011 : 4) Untuk dapat memahami lebih jauh tentang konfigurasi pin ATMega16 maka pada Tabel 2.1 diberikan deskripsi kaki-kaki atau pin ATMega16. Tabel 2.3 Keterangan pin ATMega16 No Nama Pin Fungsi Port B.0/ Counter/ Clock eksternal untuk 1 PB0 (XCK/TO) 2 PB1 (T1) 3 PB2 (INT1/AIN0) 4 PB3 (OC0/AIN1) 5 PB4 (SS) Port B.4 / SPI Slave Select Input (SS) 6 PB5 (MOSI) Port B.5 / SPI bus Master Out Slave In USART (xck) Port B.1/ Counter 1 Port B.2/ Input (+) Analog Komparator (AIN0) dan interupsi eksternal 2 (INT2) Port B.3 / Input (-) Analog Komparator (AIN1) dan output PWM 0 15 7 PB6 (MISO) Port B.6 / SPI bus Master In Slave Out 8 PB7 (SCK) Port B.7 / Sinyal Clock Serial SPI 9 RESET Me-reset Mikrokontroler 10 VCC Catu Daya (+) 11 GND Sinyal Ground terhadap catu daya XTAL2 – XTAL1 Sinyal Input Clock eksternal (kristal) 14 PD0 (RXD) Port D.0 / Penerima data serial 15 PD1 (TXD) Port D.1 / Pengirim data serial 16 PD2 (INT0) Port D.2 / interupsi eksternal 0 17 PD3 (INT1) Port D.3 / interupsi eksternal 1 18 PD4 (OC1) Port D.4 / Pembanding timer-counter 1 19 PD5 (OC1A) Port D.5 / Output PWM 1A 20 PD6 (ICP1) Port D.6 / Timer-Counter 1 Input 21 PD7 (OC2) Port D.7 / Output PWM 2 22 PC0 (SCL) Port C.0 / Serial bus clock line 23 PC1 (SDA) Port C.1/ Serial bus data input-output 24-27 PC2 – PC5 Port C.2 – Port C.5 28 PC6 (TOSC1) Port C.6 / Timer Osilator 1 29 PC7 (TOSC2) Port C.7 / Timer Osilator 2 30 AVCC Tegangan ADC 31 GND Sinyal Ground ADC 32 AREFF Tegangan referensi ADC PA0 (ADC0) – PA7 Port A.0 – Port A.7 dan input untuk ADC (ADC7) (8 channel : ADC0 – ADC7 12-13 33-40 (Setiawan, 2011:5-6) 2.4.1.2 Fitur Atmega16 Fitur Atmega16 yang merupakan produksi ATMEL yang berjenis AVR adalah sebagai berikut: 16 1. 32 Saluran I/O yang terdiri dari 4 port (Port A, Port B, Port C dan Port D) yang masing-masing terdiri dari 8 bit. 2. ADC 10 bit (8 pin di Port A.0 sampai dengan Port A.7). 3. 2 buah Timer/Counter (8 bit). 4. 1 buah Timer/Counter (16 bit). 5. 4 channel PWM. 6. 6 Sleep Modes : Idle, ADC Noise Reduction, Power-save, Power-down, Standby and Extended Standby. 7. Komparator analog. 8. Watchdog timer dengan osilator internal 1 MHz. 9. Memori 16 KB Flash. 10. Memori 512 byte SRAM . 11. Memori 512 byte EEPROM yang dapat di program saat operasi. 12. Kecepatan maksimal 16 MHz. 13. Tegangan operasi 4,5 Volt DC sampai dengan 5,5 Volt DC 14. 32 jalur I/O yang dapat deprogram. 15. Interupsi Internal dan Eksternal. 16. Komunikasi serial menggunakan Port USART dengan kecepatan maksimal 2,5 Mbps. 17. Pemrograman langsung dari port parallel computer (Setiawan, 2011 : 2-3). 17 2.4.1.3 Arsitektur ATMega16 Gambar 2.6 Blok Diagram Arsitektur ATMega16 (Setiawan, 2011 : 6) 2.5 Motor DC Motor DC merupakan sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik (Fathurohim,2012:1). 18 Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung/directunidirectional. Motor DC memiliki 3 bagian atau komponen utama untuk dapat berputar sebagai berikut: 2.5.1 Bagian Atau Komponen Utama Motor DC a. Kutub medan Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub selatan. Garis magnetik energi membesar melintasi ruang terbuka diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat satu atau lebih elektromagnet. b. Current Elektromagnet atau Dinamo Dinamo yang berbentuk silinder, dihubungkan ke as penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi. c. Commutator Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah untuk transmisi arus antara dinamo dan sumber daya (Fathurohim M, 2010:07). Gambar 2.7 Motor DC (Sumber: Fathurohim M, 2010:07) 19 2.6 Motor Servo Motor Servo merupakan motor DC yang mempunyai kualitas tinggi. Motor ini sudah dilengkapi dengan sistem kontrol. Pada aplikasinya, motor servo sering digunakan sebagai kontrol loop tertutup, sehingga dapat menangani perubahan posisi secara tepat dan akurat begitu juga dengan pengaturan kecepatan dan percepatan (Budiharto, 2014:81). Gambar 2.8 Bentuk Fisik Motor Servo (Budiharto, 2014:81) Sistem pengkabelan motor servo terdiri dari 3 bagian, yaitu Vcc, Gnd, dan Kontrol (PWM). Penggunaan PWM pada motor servo berbeda dengan penggunaan PWM pada motor DC. Pada motor servo, pemberian nilai PWM akan membuat motor servo bergerak pada posisi tertentu lalu berhenti (kontrol posisi). Pengaturan dapat menggunakan delay pada setiap perpindahan dari posisi awal menuju posisi akhir. Motor servo dibedakan menjadi 2, yaitu continous servo motor dan uncontinous servo motor. Pada continous servo motor, motor servo dapat berputar 360° sehingga memungkinkan untuk bergerak rotasi. 2.7 Sirkuit Terpadu atau Integreted Circuit (IC) Sirkuit terpadu (Bahasa Inggris:Integreted Circuit atau IC) adalah komponen dasar yang terdiri dari resistor, transistor dan lain-lain. IC adalah komponen yang dipakai sebagai otak peralatan elektronika (Daryanto, 2010:22). 20 Dalam pembangunan sistem navigasi kursi koda ini digunakan beberapa IC, yaitu IC L293D dan LM7805. Berikut penjelasan singkat mengenai kedua IC tersebut: 2.7.1 IC L293D IC L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC Gambar 2.9 IC L293D Gambar 2.10 Konstruksi Pin IC L293D Fungsi Pin IC L293D 1 Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC. 2 Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC 21 3 Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC 4 Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan. 5 Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan. 2.7.2 IC Regulator 7805 IC LM 7805 (regulator) adalah untuk menstabilkan tegangan dari catu daya bila terjadi perubahan tegangan. Keuntungan memakai ic LM 7805 ini Tidak membutuhkan penambahan komponen luar yang sangat sedikit (Indraharja, 2012:8). 1. Mempunyai proteksi terhadap arus hubungan singkat 2. Mempunyai tegangan output yang konstan 3. Mempunyai arus rendah 4. Memiliki ripple output yang sangat kecil 5. Pembiayaan rendah Gambar 2.11 IC 7805 (Salinsalim, 2014:12) 22 2.8 LCD (Liquid Cristal Display) LCD merupakan salah satu perangkat penampil yang sekarang ini mulai banyak digunakan. Penampil LCD mulai dirasakan menggantikan dari penampil CRT (Cathode Ray Tube), yang sudah berpuluh-puluh tahun digunakan manusia sebagai penampil gambar/text. Gambar 2.12 Bentuk Fisik LCD 16x2 (Setiawan, 2011 : 24) Sebuah LCD (Liquid Crystal Display) dibentuk oleh suatu jenis cairan khusus yang ditempatkan di antara dua buah lempengan kaca. Terdapat sebuah bidang latar (backplane), yang merupakan lempengan kaca bagian belakang, dengan sisi dalam yang ditutupi oleh lapisan elektroda transparan. Dalam keadaan normal, cairan yang digunakan memiliki warna yang cerah. Daerah-daerah tertentu pada cairan akan berubah warnanya menjadi hitam, ketika tegangan bolak-balik diterapkan antara bidang latar dan pola ekstroda yang terdapat pada sisi dalam lempeng kaca bagian depan (Bishop, 2004:158). Fungsi dari LCD dalam suatu aplikasi mikrokontroler sangat penting sekali, di antaranya untuk : 1. Memastikan data yang kita masukkan valid 2. Mengetahui hasil suatu proses 3. Memonitor suatu proses 4. Men-debug program 5. Menampilkan pesan (Sanjaya, 2015:5). 23 Gambar 2.13 Konfigurasi pin LCD (Sumber : Setiawan, 2011:25) Operasi dasar pada LCD terdiri dari empat, yaitu instruksi mengakses proses internal, instruksi menulis data, intruksi membaca kondisi sibuk, dan instruksi membaca data. ROM pembangkit sebanyak 192 tipe karakter, tiap karakter dengan huruf 5 x 7 dot matriks. Kapasitas pembangkit RAM 8 tipe karakter (membaca program), maksimum pembacaan 80 x 8 bit tampilan data. Perintah utama LCD adalah Display clear, Cursor Home, Display ON/OFF, Cursor ON/OFF, Display Character Blink, Cursor Shift, dan Display Shift (Setiawan, 2011 : 26). Tabel 2.4 Konfigurasi Pin LCD No. Pin 1 2 3 4 5 6 7 8 9 10 11 Keterangan GND VCC VEE RS RW E DO D1 D2 D3 D4 Konfigurasi Hubung Ground Tegangan + 5VDC Ground Kendali RS Ground Kendali E/Enable Bit 0 Bit 1 Bit 2 Bit 3 Bit 4 24 12 D5 13 D6 14 D7 15 A 16 K (Setiawan, 2011 : 26) Bit 5 Bit 6 Bit 7 Anoda (+5VDC) Katoda (Ground) 2.9 Baterai Lippo Baterai yang digunakan adalah baterai lithium polimer atau lippo 12 volt. Baterai ini berfungsi sebagai pendistribusi daya pada kursi roda sehingga kursi roda dapat bergerak tanpa menggunakan sumber tenaga listrik. Baterai ini memiliki rating 3,7 volt per sell. Sehingga dapat menyuplai daya pada kursi roda lebih maksimal. Gambar 2.14 Baterai Lippo (Sumber : http://ivanadhi2012.blogspot.co.id/2015/04/baterai-lipodrop.html) 2.10 Basic Compiler AVR (BASCOM AVR) BASCOM-AVR adalah program basic compiler berbasis windows untuk mikrokontroler keluarga AVR merupakan pemrograman dengan bahasa tingkat tinggi ” BASIC ” yang dikembangkan dan dikeluarkan oleh MCS elektronika sehingga dapat dengan mudah dimengerti atau diterjemahkan. Dalam program BASCOM-AVR terdapat beberapa kemudahan, untuk membuat program software ATMEGA 128, seperti program simulasi yang sangat berguna untuk melihat, simulasi hasil program yang telah kita buat, sebelum 25 program tersebut kita download ke IC atau ke mikrokontroler (Eko Sediyono, 2007 : 3). Ketika program BASCOM-AVR dijalankan dengan mengklik icon BASCOM-AVR, maka jendela berikut akan tampil : Gambar 2.15 Tampilan jemdela program BASCOM-AVR (Setiawan, 2011: 31) Tabel 2.5 Fungsi-Fungsi Submenu pada Menu File Icon Nama File New Open File File Close File Save Save as Print preview Print Exit Syntax check Show result (Setiawan, 2011: 31) Fungsi Membuat file baru Untuk Membuka File Untuk Menutup proram yang dibuka Untuk menyimpan file Menyimpan dengan nama yang lain Untuk melihat tampilan sebelum dicetak Untuk mencetak dokumen Untuk Keluar dari program Untuk memeriksa kesalahan bahasa Untuk menampilkan hasil kompilasi program Shortcut Ctrl+N Ctrl+N Ctrl+O Ctrl+S Ctrl+P Ctrl+F7 Ctrl+W