BAB III PERANCANGAN ALAT 3.1 Perancangan
advertisement

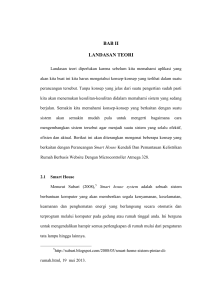
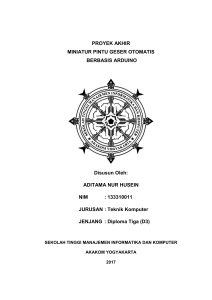
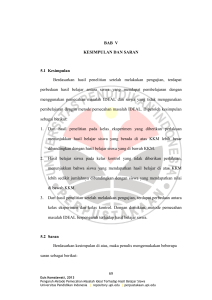
BAB III PERANCANGAN ALAT 3.1 Perancangan Dalam pembuatan suatu alat diperlikan adanya sebuah rancangan yang menjadi acuan dalam proses pembuatannya, sehingga kesalahan yang mungkin timbul dapat ditekan dan dihindari. 3.1.1 Tujuan Perancangan Perancangan ini bertujuan untuk merealisasikan gagasan yang telah direncanakan, dengan demikian dapat menghasilkan alat yang sesuai dengan fungsi pada spesifikasi sistem yang telah ditentukan. 3.2 Langkah – Langkah Perancangan Dalam memudahkan pelaksanaan perancangan alat pengatur kecepatan putaran motor DC menggunakan Arduino Atmega 2560, maka langkah awal yang ditempuh adalah membangun gagasan, kemudian dilanjutkan dengan menentukan spesifikasi dan prinsip kerja alat yang diinginkan, dilanjutkan dengan pencarian data dan informasi perangkat keras (hardware) yang diperlukan serta fungsi-fungsi kerja yang harus dipenuhi, langkah berikutnya adalah pembuatan software yang digunakan untuk mengoperasikan pengontrolan alat, sehingga perangkat keras 31 Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 32 berfungsi sesuai dengan keinginan. Dilanjutkan dengan pengukuran dan pengujian alat, pencatatan hasil pengujian dan penyusuan laporan. 3.3 Flowchart Flowchart adalah sekumpulan simbol-simbol yang menunjukan atau menggambarkan rangkaian kegiatan-kegiatan program dari awal hingga akhir. Berikut ini adalah gambar simbol – simbol standar dalam flowchart beserta dengan arti dari masing – masing simbol : No. 1 Simbol Fungsi Data, merepresentasikan input data atau output data yang diproses atau menunjukan hasil dari suatu proses. 2 Process, mempresentasikan operasi atau menunjukan setiap pengolahan yang dilakukan oleh komputer. 3 Connector, keluar ke atau masuk dari bagian lain flowchart khususnya halaman yang sama. 4 Arus atau Flow, prosedur yang dapat dilakukan dari atas ke bawah, bawah ke atas, kiri ke kanan, atau dari kanan ke kiri. 5 Decision, keputusan dalam program atau suatu kondisi yang akan menghasilkan beberapa kemungkinan pilihan atau jawaban. Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 33 6 Predefined Process, untuk menyatakan sekumpulan langkah proses yang ditulis sebagai prosedur. 7 Terminator, untuk memulai dan mengakhiri suatu program. 8 Document, input atau output dalam format yang dicetak. 9 Preparation, suatu simbol untuk menyediakan tempat pengolahan data dalam storage. Tabel 3.1 Simbol – simbol Flowchart Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 34 Berikut ini adalah flowchart dari perancangan pengatur kecepatan putaran motor DC. START INISIALISASI SERIAL HUB MENGATUR TEGANGAN MASUK Vin ≤ 6V If Vin ≥ 6V Motor Berputar. If Vin ≤ 6V Motor Tidak Berputar Vin ≥ 6V MOTOR BERPUTAR SENSOR MEMBACA KECEPATAN END Gambar 3.1 Flowchart Pengatur Kecepatan Putaran Motor DC Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 35 Penejelasan dari flowchart diatas adalah : Start/mulai kemudian pada input terdapat serial hubung yang digunakan untuk menyambungkan PC/laptop dengan mikrokontroleryang digunakan dan mengatur tegangan masuk, karena semakin besar tegangan masuk yang diberikan maka semakin cepat pula kecepatan putaran motor. Kemudian decision atau keputusan, berdasrkan spesifikasi motor yang digunakan maka motor dapat berputar pada tegangan lebih dari 6 Volt apabila tegangan masuk/input yang diberikan kurang dari 6 Volt maka motor tidak dapat berputar. Setelah itu output yaitu motor berputar dan kemudian sensor akan membaca kecepatan putaran motor berdasarkan dengan tegangan masuk yang diberikan. 3.4 Blok Diagram Berdasarkan perencanaan sistem diatas, maka dibawah ini akan dijelaskan perencanaan sistem pengatur kecepatan putaran motor DC secara blok diagram. PC/laptop menjadi supply untuk arduino, untuk komunikasi diantara keduanya menggunakan hubung serial melalui serial port USB. Karena tegangan out yang dikeluakan oleh arduino hanya 5 V, tidak akan cukup untuk memutarkan motor DC yang mempunyai tegangan inputan 19 V. Karena itu dibutuhkan rangkaian driver, yaitu transistor TIP 122. Transistor berfungsi sebagai penguat tegangan yang artinya untuk menguatkan tegangan 5V yang dikeluarkan oleh mikrokontroler arduino agar tegangan keluaran/outnya bisa memutarkan motor DC 19 V. Setelah melalui rangkaian driver, motor DC 19 V berputar. Untuk mengetahui berapa kecepatan putarannya digunakan sensor optocupler. Kemudian Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 36 sensor optocoupler tersebut mengirimkan data ke arduino yang kemudian diproses menjadi sistem terintegrasi yang ditampilkan melalui PC/laptop menggunakan software Visual Basic. PC/LAPTOP MIKROKONTROLER ARDUINO RANGKAIAN DRIVER MOTOR DC SENSOR OPTOCOUPLER Gambar 3.2 Blok Diagram 3.5 Perancangan Sistem Pengatur Kecepatan Putaran Motor DC Secara umum sistem pengatur kecepatan putaran motor DC terdiri dari input, kontroler, dan output. Bagian masukan (inputan) dari sistem ini adalah sensor optocoupler. Bagian kontroler dari sistem ini adalah mikrokontroler Arduino Atmega 2560 dan rangkaian driver. Bagian keluaran (output) digunakan oleh motor DC 19 V. 3.4.1 Perancangan Hardware 1. Perancangan Model Bahan yang digunakan untuk merancang miniature terduat dari akrilik dengan ketebalan 3 mm untuk alas dengan ukuran 35cm x 30cm, untuk dudukan motor DC akrilik ukuran 10cm x 7cm, papan pcb ukuran 30cm x Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 37 15cm untuk mikrokontroler arduino dan papan pcb untuk rangkaian driver ukuran 6cm x 6cm. Gambar 3.3 Foto model alat 2. Mikrokontroler Mikrokontroler yang digunakan sebagai pusat pengaturan kecepatan motor adalah Mikrokontroler Arduino Atmega 2560, dengan spesifikasi sebagai berikut : Mikrokontroler Atmega 2560 Tegangan Operasi 5V Input Tegangan (disarankan) 7-12 V Input Tegangan (batas) 6-20 V Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 38 Digital Pins I/O 54 (15 untuk output PWM) Analog Pins Input 16 Arus DC untuk Pin I/O 40 mA Arus DC untuk Pin 3.3 50 mA 256 KB yang 8 KB digunakan oleh Flash Memory bootloader SRAM 8 KB EEPROM 4 KB Clock Speed 16 Mhz Tabel 3.2 Spesifikasi Mikrokontroler Arduino Atmega 2560 3. Motor DC Gambar 3.4 Foto Motor DC Motor DC yang digunakan adalah motor DC dengan jenis lilitan magnet permanen, dengan spesifikasi sebagai berikut : Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 39 Tipe DGM-3491-2A Tegangan 19 V Kecepatan Tanpa Beban 161 rpm Arus Terukur 2A Nilai Torsi 80 mN.m Nilai Kecepatan 161 rpm Nilai Daya 24 W Rentang Kecepatan 120 ~ 150 Daya Rentang ≤ 10 W Rentang Tegangan 12 ~ 90 VDC Tabel 3.3 Spesifikasi Motor DC 4. Rangkaian Driver Rangkaian driver ialah sekumpulan rangkaian dari komponen elektronika yang tersusun dan dirangkai guna dijadikan sebagai penggerak atau pengatur kecepatan putaran motor DC. Dikarenakan output tegangan dari Arduino Mega hanya 5VDC, sehingga dibutuhkan rangkaian driver agar Arduino bisa menjalankan dan mengatur kecepatan putaran motor DC 19 V. Berikut gambar rangkaian driver : Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 40 Gambar 3.5 Rangkaian Driver Rangkaian driver ini terdiri dari komponen dioda tipe IN4004, transistor darlington tipe TIP 122 dan resistor 1KΩ. Gambar 3.6 Foto Rangkaian Driver 5. Sensor Optocoupler Sensor kecepatan putaran motor ini berfungsi untuk membaca berapa kecepatan putaran motor DC. Sensor optocoupler inilah yang digunakan sebagai umpan balik (close loop) pada sistem ini. Untuk lebih jelasnya, cara kerja dari sensor optocoupler ini adalah sebagai berikut : 1. Led infra merah dihadapkan langsung pada fototransitor dan diantara keduanya dihalangi oleh ujung piringan yang terpasang pada poros atas motor DC. Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 41 2. Pada piringan yang terpasang sensor optocopler terdapat lubang yang berfungsi meneruskan sinar infra merah ke fototransistor. Sehingga apabila saat piringan berputar dan sensor dalam keaadan aktif, akan membaca berapa kecepatan putaran motor DC. Gambar 3.7 Rangkaian Sensor Optocoupler Rangkaian sensor optocoupler ini terdiri dari komponen sensor optocoupler type WYC H92B4, dan resistor 22KΩ. 3.6 Perancangan Software 3.5.1 Pembuatan Program Arduino Mega Arduino Mega berkomunikasi dengan PC/laptop melalui hubungan serial dengan menggunakan port atau sambungan USB (Universal Serial Bus) yang ada pada PC/laptop yang dihubungkan dengan port USB yang ada pada Arduino Mega. Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 42 Program Arduino Mega dibuat melalui IDE (Integrated Developer Environment) Arduino itu sendiri dengan menggunakan bahasa C, artinya untuk memprogram Arduino kita tidak perlu repot – repot untuk mencari software pemrogrammnya,karena dari Arduino itu sendiri telah disediakan software bernama IDE Arduino untuk memprogram Mikrokontroler Arduino. Gambar 3.8 Tampilan Program Arduino Mega Program alat pada Tugas Akhir ini menggunakan pemrograman bahasa C dengan complier arduino-1.0-windows. Untuk lebih jelasnya, perintah-perintah yang digunakan dapat dilihat pada lampiran. Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 43 3.5.2 Pembuatan Program Visual Basic Dalam rancangan alat ini, digunakan Visual Basic 6.0 yang berfungsi untuk menterjemahkan nilai kecepatan yang terbaca oleh sensor optocoupler pada PC/laptop. Untuk memulai pembuatan program aplikasi di dalam Visual Basic, yang dilakukan adalah membuat project baru. Project adalah sekumpulan form, modul, fungsi, data dan laporan yang digunakan dalam suatu aplikasi. Membuat project baru dapat dilakukan dengan memilih menu [File] >> [New Project] atau dengan menekan ikon [new project] pada Toolbar yang terletak pada pojok kiri atas. Setelah itu akan muncul konfirmasi untuk jenis project dari program aplikasi yang akan dibuat seperti terlihat pada gambar 3.6 dibawah ini : Gambar 3.9 Layar Pemilih Jenis Project Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 44 Seperti pada gambar 3.6, Visual Basic 6.0 menyediakan 13 jenis project yang akan dibuat. Namun penulis memilih menggunakan Standard EXE, karena project jenis ini sangat sederhana tetapi memiliki keunggulan bahwa semua komponennya dapat diakui oleh semua unit komputer dan semua user meskipun bukan administrator. Kemudian akan muncul Form Project. Gambar 3.10 Form Project Kontrol – kontrol pada toolbox akan diletakkan disini sesuai dengan rancangan program aplikasi. Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 45 Gambar 3.11 Tampilan Pengatur pada Form Project Kemudian tulis kode – kode atau syntax program aplikasi pada Form Kode, yang didalamnya memanipulasi, mengatur dan memberikan perintahperintah terhadap project yang kita buat. Gambar 3.12 Form Kode Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu 46 Gambar 3.13 adalah tampilan dari jendela form visual basic 6.0, yang didalamnya sudah terdapat program yang digunakan pada rancangan monitoring. Untuk lebih jelasnya tentang perintah-perintah pada Form Kode, dapat dilihat pada lampiran. Gambar 3.13 Tampilan Interface Software Visual Basic Jeje Rohiman, 2014 PENGATUR KECEPATAN PUTARAN MOTOR DC MAGNET PERMANEN 19 VOLT MENGGUNAKAN MIKROKONTROLER ARDUINO ATMEGA 2560 Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu