bab i pendahuluan
advertisement

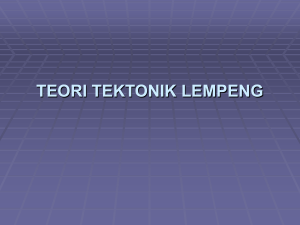
BAB I PENDAHULUAN I.1. Latar Belakang Indonesia merupakan negara kepulauan yang terletak pada pertemuan tiga lempeng benua, yaitu lempeng Eurasia, Indo-Australia, dan Pasifik yang menjadikan Indonesia memiliki tatanan tektonik yang kompleks. Teori Pelat Tektonik, lempenglempeng kerak bumi ini bergerak relatif satu terhadap yang lain. Dalam kasus di Indonesia, lempeng-lempeng ini bergerak saling bertumbukan yang mengakibatkan terkumpulnya energi potensial seiring dengan regangan dan tegangan yang terjadi. Ketika daerah pertemuan tersebut tidak lagi mampu menahan besarnya tegangan yang terakumulasi, maka terjadilah pelepasan energi yang diikuti oleh dislokasi bagian lempeng-lempeng tersebut. Fenomena ini mengakibatkan terjadinya getaran tanah yang lazim disebut sebagai gempa tektonik (Wegener, 1966). Berdasarkan uraian tersebut, tidaklah mengherankan jika Indonesia merupakan daerah rawan gempa. Gambar penunjaman lempeng di Indonesia dapat dilihat pada Gambar I.1. Gambar I.1. Penunjaman lempeng dunia (sumber: www.USGS.gov) Pulau Jawa berada di tepi tenggara Daratan Sunda (SundaLand). Pada Daratan Sunda ini terdapat dua sistem gerak lempeng. Lempeng Laut Cina Selatan di utara dan 1 2 Lempeng Samudera Hindia di selatan. Lempeng Laut Cina Selatan (Eurasia) bergerak ke tenggara sejak Oligosen, sedangkan Lempeng Samudera Hindia yang berada di selatan bergerak ke utara sejak Mesozoikum dan menunjam ke bawah sistem busur kepulauan Sumatera dan Jawa (Liu, dkk., 1983 dalam Widiasworo, 2011). Pola geodinamika lempeng bumi yang dinamis seperti terjadi di Pulau Jawa tersebut dapat diukur secara geometris dengan menggunakan receiver GNSS (Global Navigation Satellite Sistem) yang ditempatkan pada suatu titik pengamatan geodinamika dan diukur secara berkala. Penggunaan teknologi GNSS memiliki kelebihan antara lain, dapat beroperasi selama 24 jam dan tidak terpengaruh oleh kondisi cuaca, tidak perlu saling terlihat antara titik pengamatan, mudah dalam proses akuisisi data yang berjumlah besar dan memiliki ketelitian tinggi dalam waktu yang cepat, serta dapat digunakan untuk memantau area yang luas tanpa mengurangi presisi pengukuran 3D (Widjajanti, 2010). Studi pergeseran beberapa titik pasang surut (pasut) di Pulau Jawa yang dilakukan oleh Taftazani (2013) dengan menggunakan data pengamatan GNSS pada rentang waktu 2009 s.d. 2012, terdapat anomali pola pergerakan pada satu titik terhadap titik yang lain. Lima stasiun pasut yang diamat yaitu Prigi, Tanjung Mas, Cilacap, Pamengpeuk, dan Sunda Kelapa. Titik pengamatan yang dilakukan di Sunda Kelapa mengalami pergerakan horizontal ke arah barat daya sedangkan titik pengamatan yang lain mengalami pergerakan horizontal ke arah tenggara. Kondisi ini menimbulkan pertanyaan mengapa titik di Sunda Kelapa pergerakannya tidak konsisten dengan titik lain. I.2. Identifikasi Masalah Pada penelitian studi geodinamika lima stasiun pasut di Pulau Jawa pada tahun 2009 s.d. 2012, yang dilakukan oleh Taftazani terdapat satu titik yang memiliki arah pergerakan horizontal yang berbeda dengan pergerakan titik lainnya. Empat titik (Prigi, Cilacap, Tanjung Mas, Pameungpeuk) mengalami pergerakan horizontal ke arah tenggara, sedangkan satu titik (Sunda Kelapa) mengalami pergerakan horizontal ke arah barat daya. Salah satu titik tersebut melenceng dari arah pergerakan tektonik Pulau Jawa. Oleh karena itu perlu dikaji lebih lanjut tentang pergerakan horizontal dan vertikal lima stasiun pasut di Pulau Jawa dengan data pengamatan GNSS tahun 3 selanjutnya (2013). Kajian tersebut diperlukan untuk memastikan arah pergeseran titik di Sunda Kelapa. I.3. Pertanyaan Penelitian Berdasarkan identifikasi permasalahan tersebut, maka pertanyaan penelitiannya sebagai berikut: 1. Berapa nilai dan ketelitian koordinat lima stasiun pasut di Pulau Jawa pada tahun 2012 dan 2013 yang dihitung dengan menggunakan titik ikat global ? 2. Berapa besar dan arah pergeseran pada sumbu X, Y, dan Z lima stasiun pasut Pulau Jawa tersebut pada rentang waktu antara tahun 2012 s.d. 2013 ? 3. Apakah arah pergerakan horizontal dan vertikal lima stasiun pasut Pulau Jawa pada rentang waktu 2012 s.d. 2013 konsisten dengan arah pergerakan penelitan sebelumnya yang dilakukan oleh Taftazani (2013) pada rentang waktu 2009 s.d. 2012 ? I.4. Cakupan Penelitian Penelitian ini dibatasi dalam hal berikut ini: 1. Data yang digunakan adalah data pengamatan GNSS selama empat hari pengamatan (empat doy) pada tahun 2012 dan 2013 di lima stasiun pasut Pulau Jawa (Prigi, Cilacap, Tanjung Mas, Pameungpeuk, Sunda Kelapa). 2. Pengolahan data menggunakan perangkat lunak GAMIT/GLOBK. 3. Metode analisis pergeseran ke arah sumbu X, Y, dan Z menggunakan uji signifikansi dua parameter t-student. I.5. Tujuan Penelitian Tujuan penelitian ini adalah: 1. Menentukan nilai koordinat dan ketelitian koordinat lima stasiun pasut di Pulau Jawa yang diikatkan pada titik ikat global pada tahun 2012 dan 2013. 2. Menentukan besar dan arah pergeseran ke arah sumbu X, Y, dan Z lima stasiun pasut Pulau Jawa pada rentang waktu antara tahun 2012 s.d. 2013. 3. Menentukan pola pergerakan horizontal dan vertikal lima stasiun pasut Pulau Jawa pada rentang waktu 2012 s.d. 2013 terhadap pergerakan titik pada rentang waktu 2010 s.d. 2012. 4 I.6. Manfaat Penelitian Manfaat dari penelitian ini dapat diperoleh koordinat dan ketelitian dari lima stasiun pasut di Pulau Jawa pada tahun 2012 dan 2013, serta untuk mengetahui besar kecepatan, arah pergerakan horizontal dan vertikal serta pola pergerakan lima stasiun pasut di Pulau Jawa. Dengan mengetahui pola pergerakan horizontal dan vertikal serta kecepatan stasiun pasut tersebut serta dengan melihat catatan kegempaan yang ada, dapat diketahui potensi gempa bumi akibat aktivitas penunjaman lempeng. I.7. Tinjauan Pustaka Pada tahun 20013 Bock, dkk., melakukan studi pergeseran lempeng di Kepulauan Indonesia untuk mengetahui pergeseran lempeng Kepulauan Indonesia relatif dengan lempeng yang berada di sekitarnya, antara lain Lempeng Eurasia, Lempeng Hindia-Australia, Lempeng Pasifik dan sebagainya. Penelitian menggunakan pengamatan data GPS pada 150 lebih titik pengamatan di seluruh Indonesia dari tahun 1991 s.d. 2001. Hasil dari penelitian tersebut menyebutkan adanya pergeseran lempeng secara relatif terhadap lempeng-lempeng di sekitarnya. Salah satunya Lempeng Asia Tenggara bergerak relatif terhadap Lempeng Eurasia dengan kecepatan 6 cm ± 3 mm per tahun. Setiadi (2007) melakukan hitung koordinat stasiun pasut dengan perangkat lunak ilmiah GAMIT/GLOBK dari data pengamatan selama 3 x 24 jam. Data yang digunakan adalah data pengamatan pada lima stasiun pasut di Pulau Jawa (Tanjung Priok, Jepara, Tanjung Perak, Prigi, dan Cilacap) dengan menggunakan delapan buah titik ikat IGS (COCO, DGAR, GUAM, IISC, JABI, KARR, KUNM, dan PIMO). Hasil penelitian tersebut berupa koordinat pada masing-masing stasiun pasut dengan ketelitian fraksi milimeter sampai sentimeter. Ketelitian baseline yang dihasilkan yaitu antara 0,00323 s.d. 0,01125 mm. Ketelitian baseline tertinggi terletak pada baseline stasiun KARR ke CILA sebesar 3,23 mm, sedangkan yang terendah terletak pada baseline stasiun PRIG ke DGAR sebesar 1,125 cm. Abidin, dkk., (2009) telah melakukan studi deformasi kerak bumi di Pulau Jawa untuk mengetahui deformasi antar seismik di tiga patahan aktif di Jawa Barat, serta studi deformasi sebelum dan sesudah peristiwa seismik pada 15 Mei 2006 hingga Juli 2008 di bagian selatan Jawa. Penelitian tersebut menggunakan data pengamatan GNSS. 5 Hasil yang diperoleh bahwa di sekitar tiga patahan aktif (Cimandiri, Lembang dan Baribis) Jawa Barat mengalami pergeseran horizontal sebesar 1 s.d. 2 cm/tahun. Sedang pada penelitian sebelum dan sesudah gempa bumi Yogyakarta tahun 2006 dihasilkan bahwa saat gempa terjadi karena pergeseran patahan Opak sejauh kurang dari 10 cm. Setelah gempa, masih terjadi pergeseran sejauh kurang dari 5 cm pada tahun 2006 s.d. 2007, dan kurang dari 3 cm pada tahun 2007 s.d. 2008. Mc.Caffrey (2009) meneliti tentang kerangka tektonik pada zona tumbukan Lempeng Sumatera-Jawa. Metode yang dilakukan yaitu studi geologi lempeng, dimana pada kawasan Sumatera-Jawa terjadi tumbukan lempeng antara Lempeng HindiaAustralia dengan Lempeng Eurasia. Selain itu dari studi geologi ditemukan Patahan Sumatera di bagian daratan Pulau Sumatera, serta patahan di dasar laut sebelah selatan Sumatera dan Jawa. Studi tektonik diketahui, bahwa dari patahan di dasar laut selatan Sumatera telah terjadi gempa bumi akibat dari penunjaman lempeng tersebut. Sejarah mencatat sejak tahun 1800-an sampai 2006 telah terjadi lebih dari sepuluh kali gempa bumi dengan kekuatan lebih dari 6,0 SR di wilayah selatan Sumatera. Gempa bumi itu berasal dari pelepasan energi akibat dari penunjaman Lempeng Hindia-Australia dengan lempeng Eurasia. Sedang pada wilayah Busur Sunda yang membentuk Pulau Jawa, tercatat baru beberapa kali gempa pada rentang tahun 1800-an sampai 2006 dengan kekuatan lebih dari 6,0 SR. Gempa terbesar yang terakhir terjadi pada tahun 2006 dengan kekuatan 6,3 SR (USGS, 2006). Penelitian yang berkaitan dengan geodinamika Pulau Jawa dilakukan oleh Taftazani (2013). Penelitian tersebut melakukan analisis geodinamika lima stasiun pasut dengan tiga tahun (2009, 2010, 2012). Penelitian tersebut menggunakan data pengamatan GNSS di lima stasiun pasut yang tersebar di Pulau Jawa (Prigi, Tanjung Mas, Cilacap, Pameungpeuk, dan Sunda Kelapa). Pengolahan diikatkan dengan tujuh buah titik ikat IGS (COCO, DARW, KARR, KUNM, NTUS, PIMO dan GUUG). Koordinat lima stasiun pasut Pulau Jawa pada tahun 2009, 2010 dan 2012 diolah dengan menggunakan GAMIT/GLOBK. Hasil yang diperoleh terdapat perbedaan koordinat yang relatif kecil pada masing-masing tahun, yakni dalam cakupan fraksi milimeter sampai dengan sentimeter. Pola pergerakan horizontal stasiun pasut pada rentang tahun 2009 s.d. 2010, 2010 s.d.2012 dan 2009 s.d. 2012 sebagian besar memiliki kecenderungan bergerak ke arah tenggara dengan kecepatan berkisar antara 0,9 s.d. 65,9 6 mm/tahun. Akan tetapi ada satu titik yang melenceng dari arah pergeseran tektonik Pulau Jawa, yaitu Sunda Kelapa yang bergeser ke arah barat daya. Penelitian ini merupakan studi lanjutan yang telah dilakukan oleh Taftazani (2013) tentang pergerakan horizontal dan vertikal titik kontrol di lima stasiun pasut Pulau Jawa yaitu Prigi, Tanjung Emas, Cilacap, Pameungpeuk, dan Sunda Kelapa. Pada penelitian sebelumnya terdapat anomali pola pergerakan horizontal dan vertikal salah satu titik terhadap titik yang lain. Pada penelitian ini pengukuran dilakukan menggunakan receiver GNSS tipe geodetic selama empat hari pengamatan (empat doy) pada tahun 2012 dan 2013. Sedangkan pengolahannya menggunakan perangkat lunak ilmiah GAMIT/GLOBK. I.8. Landasan Teori I.8.1. Geodinamika Teori lempeng tektonik dikemukakan oleh Mc.Kenzie dan Parker (1967) ahli Geofisika Inggris. Kedua ahli itu menjadikan teori-teori sebelumnya sebagai satu kesatuan konsep yang lebih sempurna sehingga diterima oleh para ahli geologi. Teori lempeng tektonik diyakini oleh banyak ahli sebagai teori yang menerangkan proses dinamika bumi, antara lain gempa bumi dan pembentukan jalur pegunungan. Menurut teori ini kulit bumi (kerak bumi) yang disebut litosfer terdiri dari lempengan yang mengambang di atas lapisan yang lebih padat yang disebut astenosfer. Ada dua jenis kerak bumi, yaitu kerak samudra dan kerak benua. Kerak samudra tersusun atas batuan yang bersifat basa, sedangkan kerak benua tersusun atas batuan yang bersifat asam. Kerak bumi menutupi seluruh permukaan bumi. Namun, akibat adanya aliran panas yang mengalir diastenosfer menyebabkan kerak bumi pecah menjadi bagianbagian yang lebih kecil. Bagian-bagian itulah yang disebut lempeng kerak bumi (lempeng tektonik). Aliran panas tersebut untuk selanjutnya menjadi sumber kekuatan terjadinya pergeseran lempeng. Lempeng tektonik, merupakan dasar dari “terbangunnya” sistem kejadian gempa bumi, peristiwa gunung berapi, pemunculan gunung api bawah laut, dan peristiwa geologi lainnya. Pola pergeseran lempeng yang dikemukakan oleh Mc.Kenzie dan Parker (1967) dapat dibagi menjadi tiga macam, yaitu: 7 1. Pergeseran lempeng saling mendekat Pergeseran lempeng yang saling mendekat dapat menyebabkan terjadinya tumbukan yang salah satu lempengnya menunjam ke bawah tepi lempeng yang lain. Daerah penunjaman tersebut membentuk palung yang dalam dan merupakan jalur gempa bumi yang kuat. Sementara itu di belakang jalur penunjaman terjadi aktivitas vulkanisme dan terbentuknya cekungan pengendapan. Contoh pergeseran lempeng ini di Indonesia adalah pertemuan Lempeng Indo-Australia dan Lempeng Eurasia. Pertemuan kedua lempeng tersebut menghasilkan jalur penunjaman di selatan Pulau Jawa, jalur gunung api di Sumatera, Jawa, dan Nusa Tenggara, serta berbagai cekungan di Sumatera dan Jawa. Batas antar lempeng yang saling mendekat hingga mengakibatkan tumbukan dan salah satu lempengnya menunjam ke bawah lempeng yang lain (subduct) disebut batas konvergen atau batas lempeng destruktif. 2. Pergeseran lempeng saling menjauh Pergeseran lempeng yang saling menjauh menyebabkan penipisan dan peregangan kerak bumi hingga terjadi aktivitas keluarnya material baru yang membentuk jalur vulkanisme. Meskipun saling menjauh, kedua lempeng ini tidak terpisah karena di belakang masing-masing lempeng terbentuk kerak lempeng yang baru. Proses ini berlangsung secara kontinu. Contoh hasil dari pergeseran lempeng ini adalah terbentuknya gunung api di punggung tengah samudra di Samudra Pasifik dan Benua Afrika. Batas antar lempeng yang saling menjauh hingga mengakibatkan terjadinya perluasan punggung samudra disebut batas divergen atau batas lempeng konstruktif. 3. Pergeseran lempeng saling melewati Pergeseran lempeng yang saling melewati terjadi karena gerak lempeng sejajar dengan arah yang berlawanan sepanjang perbatasan antar lempeng. Pada pergeseran ini kedua perbatasan lempeng hanya bergesekan. Oleh karena itu, tidak terjadi penambahan atau pengurangan luas permukaan. Namun, gesekan antar lempeng ini kadang-kadang dengan kekuatan dan tegangan yang besar sehingga dapat menimbulkan gempa yang besar. Contoh hasil dari pergeseran lempeng ini 8 adalah Patahan San Andreas di California. Patahan tersebut terbentuk karena Lempeng Amerika utara bergerak ke arah selatan, sedangkan Lempeng Pasifik bergerak ke arah utara. Batas antar lempeng yang saling melewati dengan gerakan yang sejajar disebut batas menggunting (shear boundaries). Lempeng kerak bumi dibagi menjadi dua kelompok, yaitu lempeng mayor (lempeng besar) dan lempeng minor (lempeng kecil). Pengelompokan lempeng mayor dan minor dapat dilihat pada Tabel I.1. berikut ini. Tabel I.1. Pengelompokan lempeng mayor dan minor (sumber: topex.ucsd.edu) No Lempeng Mayor Lempeng Minor 1. Lempeng Eurasia Lempeng Filipina 2. Lempeng Amerika Utara Lempeng Juan De Fuka 3. Lempeng Amerika Selatan Lempeng Karibia 4. Lempeng Afrika Lempeng Kokos 5. Lempeng Indo-Australia Lempeng Nazca 6. Lempeng Pasifik Lempeng Skotia 7. Lempeng Antartika Lempeng Arabia Berlandaskan pada teori lempeng tektonik, kerak bumi terpecah-pecah menjadi lempengan-lempengan yang mengapung di atas lapisan yang lebih cair. Lempeng tektonik tebalnya dapat mencapai 80 km, tetapi ada juga yang lebih tipis dengan luas yang beragam. Jika lempeng-lempeng tersebut bergerak saling bertumbukan, maka menyebabkan penunjaman. Sesuai dengan hukum fisika sederhana, lempengan yang berat jenis atau massanya lebih besar, menunjam dan menyusup ke bawah lempeng yang lebih ringan. Pergeseran lempeng tektonik tersebut sangat lambat, yaitu antara 1 dan 10 cm per tahun. Namun, pergeseran yang sangat lambat tersebut ternyata mengumpulkan energi yang sangat kuat secara pelan-pelan di kedalaman sekitar 80 km. Apabila tekanan dan regangan tumbukan lempeng mencapai titik jenuh, biasanya terjadi gerakan lempeng tektonik secara tiba-tiba. Gerakan tersebut menimbulkan getaran di muka bumi yang disebut gempa. 9 I.8.2. Pengamatan GNSS GNSS merupakan suatu sistem penentuan posisi di permukaan bumi dengan menggunakan satelit. Beberapa sistem satelit navigasi yang dapat digunakan secara umum yaitu GPS dan GLONASS. GNSS merupakan suatu sistem navigasi dan penentuan posisi yang dimiliki dan dikelola oleh Amerika Serikat. Sistem ini berguna untuk memberikan posisi dan kecepatan tiga dimensi serta informasi mengenai waktu dan cuaca, kepada banyak orang secara simultan (Abidin, 2007). Sampai saat ini satelitsatelit GNSS ada 24 satelit aktif yang mengorbit di angkasa luar dan tersebar merata di luar bumi. Sekarang ini, kegunaan GNSS sebagai metode penentuan posisi sudah dimanfaatkan secara luas, salah satunya digunakan untuk pengamatan pergeseran tanah. Pada dasarnya, penggunaan GNSS untuk pergeseran tanah dilakukan dengan menentukan koordinat titik-titik pantau secara teliti dan berkala. Dengan mempelajari perubahan koordinat titik-titik pantau tersebut secara kontinyu dari waktu ke waktu, maka besarnya kecepatan dan arah pergeseran dapat diketahui. Dengan diketahuinya besar kecepatan dan arah pergeseran, analisis dan estimasi mengenai regangan yang terjadi dapat dilakukan. I.8.3. Penentuan Posisi dengan GNSS Konsep dasar penentuan posisi dengan GNSS menggunakan metode pemotongan ke belakang dengan jarak. Pada Gambar I.2 pengukuran jarak antara receiver GNSS dan beberapa satelit GNSS yang mengorbit di angkasa luar dilakukan secara simultan. Untuk menentukan koordinat suatu titik di bumi, receiver setidaknya membutuhkan empat satelit yang dapat diterima dengan baik. 10 Gambar I.2. Penentuan posisi relatif pengamatan GNSS (Widjajanti, 2010) Keterangan Gambar I.2: (SV)i : satellite vehicle Q dan P : posisi receiver di permukaan bumi (φ,λ) : lintang dan bujur geodetis Posisi suatu titik di permukaan bumi dapat ditentukan menggunakan receiver GNSS dengan metode penentuan posisi absolut (point positioning), maupun terhadap titik lain yang diketahui koordinatnya dengan metode penentuan posisi relatif (differential positioning) yang minimal dua receiver GNSS (Abidin, 2007). I.8.3.1. Penentuan posisi absolut. Penentuan posisi koordinat di suatu titik dengan menggunakan satu receiver, koordinat yang diperoleh ditentukan terhadap suatu sistem koordinat yang telah terdefinisikan. Persamaan untuk menentukan jarak titik dari dapat dituliskan dalam rumus I.1 dan I.2 sebagai berikut (Adiwibawa, 2007): ( )……………...............................................................................(I.1) ( )………………………………………..……………………….(I.2) 11 Dalam hal ini, : jarak titik di permukaan bumi (A) ke satelit : panjang gelombang : fase (gelombang tidak penuh) :jumlah gelombang penuh Penentuan posisi absolut tidak terlepas dari kesalahan orbit, bias ionosfer dan troposfer, kesalahan dan offset dari jam receiver dan jam satelit, serta multipath pada hasil pengamatan, sehingga persamaan I.1 dan I.2 menjadi I.3: .......... (I.3) I.8.3.2. Penentuan posisi relatif. Posisi yang diperoleh ditentukan terhadap titik lain yang telah diketahui koordinatnya dan dianggap sebagai titik acuan dengan menggunakan minimal dua receiver GNSS (Sunantyo, 2000). Penentuan posisi secara diferensial dapat memberikan ketelitian posisi yang relatif tinggi dengan level sentimeter sampai dengan milimeter. Teknik yang digunakan pada penentuan posisi secara diferensial adalah teknik differencing, yakni dengan mengurangkan data pengamatan GNSS untuk mengeliminasi dan mereduksi efek dari sebagian kesalahan dan bias yang terjadi pada saat melakukan pengamatan GNSS. Data pengamatan hasil pengurangan tersebut menjadi relatif lebih teliti. Dalam pengolahan data pengamatan GNSS secara differencing, dikenal beberapa teknik, yaitu single difference, double difference dan triple difference. 1. Penentuan posisi single difference, merupakan penentuan posisi dengan cara pengurangkan (differencing) dua persamaan pengamatan penentuan posisi one way (OW). Jika terdapat dua receiver (A dan B) yang mengamati satu satelit (satelit c), dapat dituliskan dengan persamaan I.4: …..(I.4) 2. Penentuan posisi double difference, merupakan teknik penentuan posisi dengan cara mengurangkan (differencing) dua persamaan pengamatan penentuan posisi relatife single difference (SD), pada dua receiver (di titik A dan B) yang mengamati dua satelit ( satelit c dan satelit d), dapat dituliskan dengan persamaan I.5: ……...…(I.5) 12 Proses differencing tersebut meliputi pengeliminasian kesalahan jam satelit dan receiver, mereduksi efek kesalahan orbit, bias ionosfer dan bias troposfer pada data pengamatan, pengestimasian ambiguitas fase. 3. Penentuan posisi triple difference, merupakan suatu teknik penentuan posisi dengan cara mengurangkan dua data pengamatan double difference dengan kala yang berbeda, misalnya dua receiver (di titik A dan B) yang mengamati dua satelit (c dan d) secara simultan sebanyak dua kala. Proses pengurangan data dapat dituliskan dengan persamaan I.6: ……..… (I.6) I.8.4. Bias dan Sumber Kesalahan Dalam perjalanannya dari satelit ke pengamat di permukaan bumi, sinyal GPS harus melalui medium propagasi, yaitu ionosfer dan troposfer dimana sinyal GPS mengalami refraksi di dalamnya. Selain itu, sinyal GPS juga dapat dipantulkan oleh benda-benda di sekitar pengamat dan menyebabkan efek multipath. Kesalahan dan bias juga dapat disebabkan oleh kesalahan orbit satelit, jam satelit, kesalahan jam satelit dan receiver, kesalahan antena, ambiguitas fase, dan cycle slips (Abidin, 2007). I.8.4.1. Kesalahan orbit satelit. Kesalahan ini disebut juga dengan kesalahan efemeris dimana orbit satelit yang terdapat dalam broadcast efemeris tidak sama dengan orbit satelit yang sebenarnya, sehingga posisi satelit yang dilaporkan tidak sama dengan posisi satelit yang sebenarnya dan nantinya akan mempengaruhi ketelitian posisi titiktitik yang diamat. Besarnya efek kesalahan orbit satelit dapat dihitung dengan persamaan I.7 (Abidin, 2007): ..........................................................................................................(1.7) Dalam hal ini, db : besarnya efek kesalahan orbit pada panjang baseline dr : besarnya kesalahan orbit b : panjang baseline r : jarak rata-rata pengamat ke satelit I.8.4.2. Cycle slips. Cycle slips adalah ketidak-kontinyuan dalam jumlah gelombang penuh dari fase gelombang pembawa yang diamati, pengamatan sinyal oleh receiver terputus oleh satu dan lain hal (Abidin, 2007). 13 I.8.4.3. Multipath. Multipath adalah fenomena dimana sinyal yang ditransmisikan oleh satelit GNSS ditermia oleh receiver melalui dua atau lebih lintasan berbeda karena efek pantulan benda-benda di sekitar pengamat seperti bangunan, jalan, permukaan air. Perbedaan jarak tempuh dapat menyebabkan sinyal-sinyal tersebut berinterferensi ketika diterima oleh antena sehingga menyebabkan kesalahan hasil pengamatan (Abidin, 2007). I.8.4.4. Ambiguitas fase. Ambiguitas fase adalah jumlah gelombang penuh yang tidak terukur oleh receiver GPS. Ambiguitas fase berupa bilangan bulat kelipatan panjang gelombang. Ketidaktepatan dalam mendefinisikan besarnya ambiguitas fase menyebabkan kesalahan dalam penentuan jarak dari satelit ke pengamat (Abidin, 2007). I.8.4.5. Kesalahan jam satelit dan receiver. Setiap satelit GPS membawa beberapa buah jam atom yang digunakan untuk mendefinisikan sistem waktu satelit. Seiring dengan berjalannya waktu, jam-jam atom tersebut mengalami penyimpangan (offset, drift, dan drift-rate). Pada umumnya receiver GPS dilengkapi dengan jam kristal quartz yang relatif lebih kecil, lebih murah, dan relatif memerlukan daya yang relatif lebih kecil dibandingkan jam atom yang digunakan di satelit (Abidin, 2007). Ketidaksinkronan antara jam satelit dengan jam receiver memberikan informasi mengenai waktu yang berbeda dan dapat menjadi sumber kesalahan. I.8.4.6. Kesalahan antena. Pada pengukuran jarak dari satelit ke antena receiver GPS, jarak ukuran diasumsikan mengacu ke pusat geometris dari antena yang lokasinya tetap. Akan tetapi, sebenarnya secara elektronik pengukuran jarak tersebut mengacu ke pusat fase antena, bukan ke pusat geometris antena. Adanya perbedaan lokasi antara pusat fase dan pusat geometris antena menyebabkan terjadinya kesalahan pada jarak ukuran (Abidin, 2007). I.8.4.7. Refraksi troposfer. Troposfer merupakan lapisan dari atmosfer yang berbatasan dengan permukaan bumi dan mempunyai ketebalan setinggi 9 s.d 16 km, tergantung pada tempat dan waktu. Ketika melalui troposfer, sinyal GPS mengalami refraksi yang menyebabkan perubahan pada kecepatan dan arah dari sinyal GPS. Efek utama dari refraksi troposfer adalah kesalahan terhadap hasil ukuran jarak (Abidin, 2007). I.8.4.8. Refraksi ionosfer. Ionosfer merupakan lapisan atas dari atmosfer. Elektron-elektron bebas yang terdapat dalam lapisan ionosfer mempengaruhi propagasi 14 sinyal GPS yang kemudian turut mempengaruhi kecepatan, arah, polarisasi, dan kekuatan dari sinyal GPS yang melaluinya. Efek terbesar dari refraksi ionosfer terletak pada kecepatan sinyal dimana ionosfer memperlambat pseudorange dan memperlambat fase dari sinyal GPS yang mempengaruhi ukuran jarak dari pengamat ke satelit (Abidin, 2007). I.8.5. Pengertian ITRF International Terrestrial Reference Frame (ITRF) adalah realisasi dari International Terestrial Reference System (ITRS). ITRS pada pada prinsipnya adalah Conventional Terrestrial System (CTS) yang didefinisikan, direalisasikan, dikelola dan dipantau oleh International Earth Orientation System (IERS). Ada beberapa produk yang dihasilkan oleh IERS selain ITRF yaitu realisasi dari International Celestial Reference System (ICRS) dan penentuan parameter orientasi bumi atau Earth Orientation Parameter (EOP) yang menghubungkan ITRS dan ICRS (Witchayangkoon, 2000). ITRS direalisasikan dengan koordinat dan kecepatan dari sejumlah titik yang tersebar di seluruh permukaan bumi, dengan menggunakan metode-metode pengamatan Very Long Baseline Interferometry (VLBI), Lunar Laser Ranging (LLR), Global Positioning System (GPS), Satelite Laser Ranging (SLR), dan DORIS. ITRF mempunyai origin di pusat massa bumi. Kerangka atau jaring titik hasil realisasi ini dinamakan ITRF (ITRF, 2006) I.8.6. Pengertian IGS International GNSS Service (IGS) adalah suatu organisasi internasional yang merupakan kumpulan dari berbagai agensi dan badan multinasional di seluruh dunia. IGS mengumpulkan sumber dan data permanen dari stasiun GNSS dan memelihara sistem GNSS tersebut. IGS didirikan oleh International Association of Geodesy (IAG). Pada tahun 1993, dan secara formal beroperasi mulai tahun 1994. Setiap negara berkontribusi dalam IGS dengan membangun stasiun IGS. Saat ini IGS mempunyai sekitar 200 stasiun penjejak satelit yang tersebar di seluruh dunia yang mengamati satelit-satelit GNSS secara kontinyu. Data 26 pengamatan stasiun IGS diolah dan dikelola oleh 16 Operational Data Centers, lima Regional Data Centers dan tiga Global Data Centers. Data ini selanjutnya diolah oleh tujuh Analysis Centers yang kemudian 15 hasilnya disebarluaskan secara global. IGS juga menerbitkan spesifikasi dan standar internasional dari data GNSS. I.8.7. Perangkat GAMIT/GLOBK GAMIT/GLOBK adalah sebuah perangkat lunak komprehensif untuk analisis data GPS yang dikembangkan oleh MIT, Harvard-Simthsonian Center for Astrophysics (CfA) dan Scripps Institution of Oceanography (SIO). GAMIT/GLOBK dapat mengestimasi koordinat dan kecepatan stasiun, representasi fungsional dan stokastik dari pasca kejadian deformasi, delay atmosfer, orbit satelit dan parameter orientasi bumi. GAMIT adalah singkatan dari GPS Analysis of Masshachusstes Institute of Technology, sedangkan GLOBK adalah singkatan dari Global Kalman Filter VLBI and GPS Analysis Program. Perangkat lunak ini didesain untuk running di sistem operasi berbasis UNIX dan melibatkan bahasa Fortran atau C untuk proses compile di direktori /libraries, /gamit dan /kf. I.8.7.1. GAMIT. GAMIT adalah paket analisis data GNSS yang komprehensif yang dikembangkan oleh MIT untuk melakukan perhitungan posisi tiga dimensi dan satelit orbit. Perangkat lunak GAMIT dikembangkan mulai tahun 1970-an ketika Massachusetts Institute of Technology (MIT) mengembangkan receiver GNSS. Setelah pengembangannya, GAMIT bermigrasi dengan platform sistem operasi Unix pada tahun 1987. Dengan berdirinya IGS pada tahun 1992 semakin memungkinkan pengembangan skema pengolahan data GNSS secara otomatis. Pada pertengahan tahun 1990, GAMIT menjadi perangkat lunak ilmiah fully automatic processing yang menyertakan data stasiun-stasiun kontinyu di seluruh dunia diantaranya IGS (Anonim, 2000). Dalam proses pengolahannya, GAMIT membutuhkan delapan macam input data, antara lain (Herring, 2010): 1. Raw data dari data pengamatan GPS. 2. l-file, yang berisi koordinat dari semua stasiun pengamatan atau titik ikat yang digunakan. Koordinat yang digunakan menggunakan koordinat geosentrik. 3. File station.info, berisi informasi stasiun-stasiun yang digunakan, seperti tempat/lokasi stasiun, tinggi antena, model antena, model receiver, waktu pengamatan (tahun, doy/day of year, start dan stop pengamatan), serta firmware yang digunakan oleh receiver. 16 4. File session.info, yang berisi sesi dari data yang diolah. Informasi yang tercantum antara lain tahun, doy, sesi pengamatan, sampling rate, banyak kala, dan nomornomor satelit. 5. File navigasi, bisa berupa rinex (Receiver INdependent EXchange Format), Navigation Messages maupun efemeris yang disediakan IGS. 6. File sestbl memuat control table mengenai karakteristik proses yang dieksekusi oleh GAMIT. 7. File sittbl digunakan untuk memberikan konstrain pada setiap stasiun pengamatan yang digunakan. 8. File GPS efemeris yang didapat dari IGS dalam format SP3. Hasil akhir dari proses pengolahan data pengamatan GPS dengan perangkat lunak GAMIT sebagai berikut: 1. q-file, memuat semua informasi hasil pengolahan data pengamatan GPS dengan GAMIT, yang disajikan dalam dua versi Biasses-free Solution dan Biasss-fixed Solution. 2. h-file, yang berisi hasil pengolahan dengan Lossely Constraint Solutions yang berupa parameter-parameter yang digunakan serta matriks varian kovarian pada pengolahan lanjutan dengan GLOBK (Global Kalman Filter VLBI and GPS Analysis Program). Input yang digunakan adalah h-file yang berisi parameter-parameter hasil pengolahan dengan perataan Lossely Constraint serta matriks varian kovarian. 3. autcln.summary-file, yang terdiri atas file autcln.prefit.sum dan autcln.post.sum. Kedua file tersebut berisi data statistik hasil editing dengan autcln. I.8.7.2. GLOBK. GLOBK adalah satu paket program yang dapat mengkombinasikan hasil pemrosesan data survei terestris ataupun data survei ekstra terestris. Kunci data input pada GLOBK adalah matriks varian kovarian dari data koordinat stasiun, parameter rotasi bumi, parameter orbit, dan koordinat hasil pengamatan lapangan (Herring, dkk., 2006). Sebagai file input digunakan h-file hasil pengolahan dengan GAMIT. Namun selain hasil pengolahan GAMIT, GLOBK juga dapat menerima input file hasil pengolahan dari perangkat lunak ilmiah lain, misal: GIPSY dan Bernesse (Herring, 2010). Terdapat tiga moda aplikasi yang dapat dijalankan dengan menggunakan GLOBK, yaitu: 17 1. Mengkombinasikan hasil pengolahan individu (misal: harian) untuk menghasilkan koordinat stasiun rata-rata dari pengamatan yang dilakukan lebih dari satu hari; 2. Mengkombinasikan hasil pengamatan selama bertahun-tahun untuk menghasilkan koordinat stasiun; 3. Melakukan estimasi koordinat stasiun dari pengamatan individu, yang digunakan untuk menggeneralisasikan data runut waktu (time series) dari pengamatan teliti harian atau tahunan. Hal yang tidak dapat dijalankan oleh GLOBK antara lain (Herring, 2010): 1. Membuat sebuah model linier, karena terdapat banyak proses perataan yang dijalankan (adjustment) pada koordinat stasiun dan parameter orbit. 2. GLOBK tidak dapat menghilangkan cycle slips, data yang buruk dan atmospheric delay modelling errors. 3. GLOBK tidak dapat melakukan resolving ambiguitas fase. I.8.8. Perataan Jaring pada GAMIT/GLOBK Pada perangkat lunak GAMIT, perataan dilakukan untuk pengecekan konsistensi terhadap sesama data ukuran. Perangkat lunak GAMIT menggunakan hitungan kuadrat terkecil parameter berbobot dengan menggunakan teknik double difference dari pengamatan data fase untuk melakukan estimasi posisi dan orbital dari titik pengamatan. Pengolahannya mengacu pada koordinat stasiun observasi, koordinat stasiun titik ikat dan parameter orbit (King dan Bock, 2002). Hasil perataan pada jaring GPS menggunakan perangkat lunak GAMIT adalah loosely constrained network dengan menggunakan free-network quasi-observation. Dengan melibatkan matriks varian kovarian sebagai persamaan hitungan kuadrat terkecil parameter berbobot, pendekatan ini menggunakan perataan baseline (King dan Bock, 2002). Persamaan (I.18) berikut ini model matematis yang belum mengalami iterasi. La = F(Xa).....................................................................................................(I.18) Sebagai contoh apabila terdapat dua receiver yang berada pada stasiun A dan B yang mempunyai vektor koordinat XA, YA, ZA pada stasiun A dan XB, YB, ZB pada stasiun B dan melakukan pengamatan terhadap dua satelit yaitu m dan n maka persamaan double difference menjadi persamaan (I.19) dan (I.20): 18 Am X Bn X m n t X A 2 Y m t YA 2 Z m t Z A 2 ...............................................(I.19) t X B 2 Y n t YB 2 Z n t Z B 2 ......................................................(I.20) Koordinat stasiun A dianggap memiliki suatu nilai pendekatan yaitu X 0 A , YA0 , Z A0 sehingga diperoleh nilai XA, YA, dan ZA seperti pada persamaan (I.21), (I.22), dan (I.23) XA = X0A + dXA .........................................................................................................(I.21) YA = Y0A + dYA .........................................................................................................(I.22) ZA = Z0A + dZA...........................................................................................................(I.23) Kemudian persamaan (I.19) dan (I.20) dapat dilinierisasi sehingga menjadi persamaan (I.24) dan (I.25) Am t Am cx m t .dX A cy m t .dY A cz m t .dZ A Bn t Bn cx n t .dX B cy n t .dYB cz n t .dZ B ...........................................(I.24) ...........................................(I.25) Dengan melakukan substitusi persamaan tersebut ke dalam persamaan matrikss residu, menghasilkan penyelesaian double difference menjadi persamaan (I.26) : LAB t rCAB t AB mn mn mn t cx mn t .dX A cy mn t .dYA cz mn t .dZ A .N AB mn …....(I.26) Selanjutnya penerapan metode parameter berbobot pada persamaan I.18 sehingga menjadi persamaan (I.27) : L’a = Xa .............................................................................................................(I.27) Dengan matriks bobot seperti tertera pada persamaan (I.28) dan persamaan matriks residu pada (I.29) berikut ini : P1 0 …………………………………………….…….……..…......…........(I.28) P 0 P 2 V = A X + L ………………………………………………..………...…......…........(I.29) Dalam hal ini matriks A, X dan L dapat dilihat dalam persamaan (I.30) s.d (I.32): 19 mn mn A cx AB t cy AB t L LAB mn cz AB mn t ………………..….......….........(I.30) t AB mn t .................................................................................(I.31) dX A dY A …………..……………….…………...............................................(I.32) X dZ A N AB Hasil persamaan observasi (I.29) yang telah dilinierisasi menjadi persamaan (I.35): X0 Xb L' Y0 Yb ………………………………………………....…………..............(I.35) Z 0 Z b Dalam hal ini, L : matriks observasi A : matriks desain X : matriks parameter ρ : jarak geometri antara satelit dengan titik pengamatan N : ambiguitas fase m,n : satelit yang teramat A, B : stasiun pengamatan (X0,Y0,Z0) : koordinat pendekatan Setelah melakukan perataan jaringan dengan menggunakan GAMIT, proses selanjutnya yaitu pendefinisian kerangka referensi dari loosely constrained network dilakukan pada pengolahan lanjutan menggunakan GLOBK, dengan hasil titik diberikan constraint yang sangat besar dan beberapa titik dianggap fixed (King dan Bock, 2002). 20 I.8.9. Evaluasi Hasil Pengolahan GAMIT dan GLOBK Evaluasi hasil pengolahan dengan menggunakan perangkat lunak GAMIT dapat dilakukan dengan memperhatikan dua parameter evaluasi pada output file GAMIT (Anonim, 2000) yaitu: 1. Postfit nrms (normalized root mean square) Nilai postfit nrmsditentukan dengan menggunakan persamaan I.36. postfit nrms = √ Dengan nilai x2 = ………………………………….……………… (I.36) ………………………………...…...……………. (I.37) Dalam hal ini, x2 : chi-squared n-u : degree of freedom 𝜕 2 : varian apriori dari unit bobot 𝜃 2 : varian aposteriori dari unit bobot : jumlah ukuran : ukuran minimum Standar kualitas nilai postfit nrms < 0,25 namun apabila nilai melebihi 0,5 berarti dimungkinkan terdapat cycle slips yang belum dihilangkan. 2. Adjust, Adjust, menunjukkan besarnya koreksi yang diberikan terhadap parameter yang digunakan pada perhitungan. 3. Fract Fract merupakan hasil perbandingan antara nilai adjust dan nilai formal seperti pada persamaan I.38. Nilai fract dapat digunakan untuk mengindikasikan apakah terdapat nilai adjust yang janggal dan perlu tidaknya diberikan iterasi untuk mendapatkan nilai adjust yang bebas dari efek non-linear. Nilai adjust menunjukkan besarnya perataan yang diberikan terhadap parameter yang digunakan dalam perhitungan. Nilai formal disebut juga nilai formal error. Nilai formal menunjukkan ketidakpastian pada pemberian data bobot untuk perhitungan kuadrat terkecil. Besar nilai fract tidak boleh lebih dari 10 (fract < 10) (Herring, 2006). 21 I.8.10. Analisis Deformasi Secara umum deformasi diartikan sebagai perubahan posisi titik, bentuk, dan dimensi benda secara absolut maupun relatif. Salah satu contohnya adalah gerakan tanah. Prinsip pengukuran deformasi adalah dengan memantau perubahan jarak, beda tinggi, sudut maupun koordinat antara titik-titik yang mewakili daerah tersebut (Abidin, 2007). Survei deformasi dilakukan secara berulang pada periode yang berlainan. Hasil dari survei tersebut selanjutnya diolah dan dilakukan hitung perataan sehingga dihasilkan koordinat hasil pengukuran. Salah satu analisis deformasi adalah analisis geometrik yang bertujuan untuk memberikan informasi tentang status geometrik obyek deformasi seperti perubahan posisi obyek (analisis pergerakan) dan perbedaan posisi, bentuk dan dimensi obyek deformasi (analisis regangan) (Taftazani, 2013). Pada penelitian ini analisis yang dilakukan adalah analisis pergerakan. Analisis ini dimaksudkan untuk mengidentifikasi besar perubahan geometrik melalui perpindahan posisi titik-titik pantau yang berada pada daerah yang diamati. Data tersebut salah satunya dapat dicari dengan menggunakan pengamatan geodetik. Dalam metode statik yang dihitung adalah selisih koordinat titik pantau antara dua periode pengamatan. Hasil yang diperoleh adalah besar dan arah perpindahan posisi titik-titik obyek yang diamati. I.8.11. Kecepatan I.8.12. Uji Statistik Uji statistik yang digunakan pada penelitian ini adalah uji signifikansi beda dua parameter. Uji tersebut digunakan untuk mengetahui nilai perbedaan yang signifikan antara dua parameter. Pengujian ini melakukan analisis dengan cara menghitung beda dua parameter dibagi dengan akar kuadrat masing-masing simpangan bakunya. Apabila dituliskan dalam suatu model matematis menjadi persamaan I.40 (Widjajanti, 2010). √ ………………………………………………………………….……..(I.40) Dengan penerimaan untuk hipotesis nol (H0) adalah sebesar T < tf,α/2 Dalam hal ini, T : nilai t hitungan tf,α/2 : distribusi t pada tabel t (student) dengan tingkat kepercayaan sebesar α 22 Xi : koordinat stasiun pada project 1 Xii : koordinat stasiun pada project 2 SXi2 : simpangan baku koordinat stasiun pada project 1 SXii2 : simpangan baku koordinat stasiun pada project 2 Pengujian tersebut mengidentifikasikan bahwa nilai koordinat untuk kedua project besarnya sama seperti pada persamaan I.41. ……………………………………………………....……..(I.41) …………………………………………………………..….……..(I.42) Daerah penerimaan untuk hipotesis nol (H0) adalah sebesar T < tf,α/2. I.9. Hipotesis Hasil dari penelitian geodinamika Pulau Jawa pada tahun 1991 s.d 2001, terdapat pergerakan horizontal ke arah tenggara dengan kecepatan 6 cm ± 3mm/tahun (Bock, dkk., 2003). Pada tahun 2009 s.d. 2012 didapatkan kecepatan pergerakan horizontal sebesar 4 s.d. 7 cm/tahun (Taftazani, 2013). Penelitian ini menggunakan data pengamatan GNSS pada sesi pengamatan tahun 2012 dan 2013. Data GNSS diolah dengan GAMIT/GLOBK dengan referensi ITRF 2008 dan titik ikat tujuh stasiun IGS untuk mendapatkan pola variasi pergerakan horizontal dan pola pergerakan stasiun pasut. Pola pergerakan horizontal yang didapatkan diduga memiliki kecepatan berkisar antara 4 s.d. 7 cm/tahun dengan arah cenderung ke tenggara karena pengaruh penunjaman lempeng Hindia-Australia di bawah lempeng Eurasia dan Indo-Australia, sedangkan pola pergerakan vertikal yang didapatkan diduga memiliki kecepatan bekisar 9 s.d.13 cm/tahun karena penurunan muka tanah.