bab ii landasan teori
advertisement

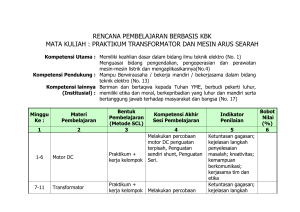
BAB II LANDASAN TEORI 2.1. Motor DC Shunt Pendahuluan 2.1.1 Motor listrik memegang peranan yang sangat penting dalam industri maupun dalam kehidupan sehari-hari. Di industri motor listrik digunakan sebagai penggerak peralatan mekanik, seperti mesin pembuat tekstil, pembuat baja, dan mesin pembuat kertas. Dalam kehidupan sehari-hari mesin listrik banyak dimanfaatkan pada peralatan rumah tangga listrik, kendaraan bermotor, peralatan kantor, peralatan kesehatan, dan sebagainya. Hal inilah yang menyebabkan konsumsi listrik rata-rata suatu industri untuk motor listrik adalah sekitar 65-70% dari total biaya listrik. Selain motor AC, induksi khususnya, jenis motor listrik yang juga sering digunakan di industri adalah motor DC Shunt. Motor DC Shunt memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor DC Shunt disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Motor DC Shunt banyak dipakai di industri kertas, tekstil, kereta api diesel elektrik, dan sebagainya. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen. Jika arus medan dipasok dari sumber di luar motor DC, maka disebut motor DC penguat terpisah (separately excited). Sedangkan jika arus medan dipasok dari sumber di dalam motor DC itu sendiri, maka disebut motor DC penguat sendiri 5 6 (self excited). Selain motor DC seri dan motor DC kompon (kompon panjang dan kompon pendek), jenis motor DC penguat sendiri yang terakhir adalah motor DC shunt. Pada motor DC shunt, gulungan medan (medan shunt) disambungkan paralel dengan gulungan dinamo (A). Oleh karena itu total arus dalam jalur secara merupakan penjumlahan arus medan dan arus dinamo. 2.1.2 Rangkaian dan persamaan Motor DC jenis ini, Motor DC Shunt, mempunyai ciri kumparan penguat medan diparalel terhadap kumparan armatur. Kelebihan dari Motor DC jenis ini yaitu tidak terlalu membutuhkan banyak ruangan karena diameter kawat kecil. Sedangkan kekurangannya yaitu daya keluaran yang dihasilkan kecil karena arus penguatnya kecil. Hal itu dapat dilihat pada gambar 2.1 dan persamaan 2.3 serta persamaan 2.4. Selain itu, kekurangan lainnya dari motor DC Shunt ialah pengaturan kecepatan yang hanya dapat dilakukan dengan cara mengatur Vs yang nantinya akan mengatur Ia juga. + IL Ra I Shunt Ia V Input = 220 V DC R shunt M DC _ Gambar 2.1 Motor DC Shunt Vs Ia.Ra 2V (Volt ) ................................................................................ (2.1) Pin Vs IL (VA) .......................................................................................... (2.2) Adapun daya keluaran dari motor DC Shunt itu sendiri dapat dihitung melalui persamaan 2.2 Pout 2. .Nr Ta (VA) .................................................................................. (2.3) 60 7 2.1.3 Karakteristik 2.1.3.1 Karakteristik putaran Motor DC Shunt memiliki karakteristik putaran yang relatif konstan. Putaran konstan tadi berarti bahwa apabila ada perubahan beban yang besar, hanya relatif terjadi penurunan putaran yang kecil (2 - 8 %). Persamaan kecepatan adalah : n Ea V Ia.Ra ........................................................................................ (2.4) K . K dilihat bahwa perubahan harga Ia akan memberikan pengaruh yang kecil Dapat terhadap n. Hal ini disebabkan oleh nilai Ra (tahanan jangkar) biasanya kecil dan untuk motor DC Shunt pada tegangan jepit (V) yang konstan maka fluks magnit (Φ) juga konstan. Adapun hubungan antara putaran terhadap arus jangkar dapat dilihat pada gambar 2.2 n = rpm Kompoun Differensial Shunt Kompoun Kumulatif Seri Ia (A) Gambar 2.2 Karakteristik putaran : n = f (Ia) Berikut beberapa fakta tentang kecepatan motor DC Shunt (E.T.E., 1997): 1) Kecepatan pada prakteknya konstan tidak tergantung pada beban (hingga torsi tertentu setelah kecepatannya berkurang) dan oleh karena itu cocok untuk penggunaan komersial dengan beban awal yang rendah, seperti peralatan mesin. 2) Kecepatan dapat dikendalikan dengan cara memasang tahanan dalam susunan seri dengan dinamo (kecepatan berkurang) atau dengan memasang tahanan pada arus medan (kecepatan bertambah). 8 2.1.3.2 Karakteristik torsi Persamaan Torsi pada motor DC Shunt adalah : Ta K Ia (Nm) ..................................................................................... (2.5) Tsh Pout 60 (Nm) .................................................................................... (2.6) 2n Pada motor DC Shunt, jika tegangan jepit V konstan, maka arus penguat magnet (Ish) juga konstan sehingga juga konstan. Torsi motor DC Shunt hanya tergantung pada arus jangkar (Ia). Akan tetapi pada beban relatif besar, meskipun arus penguat magnet (Ish) tetap, fluks magnet ( ) relatif berubah akibat reaksi jangkar. Adapun hubungan antara Torsi dan Ia dapat dilihat pada gambar 2.3 T (Nm) Seri Kompoun Shunt Ia (A) Gambar 2.3 Karakteristik Torsi : T= f (Ia) 2.1.3.3 Karakteristik mekanis Dari Persamaan 2.4 dan persamaan 2.5, dapat dilihat bahwa dengan bertambahnya Ia, dengan tetap, Torsi (T) yang bertambah akan mengakibatkan kecepatan akan sedikit turun pada motor DC Shunt. Adapun hubungan antara kecepatan dan Torsi dapat dilihat pada gambar 2.4. 9 n (rpm) Kecepatan Kerja Shunt Kompoun Kumulatif Seri Torsi Kerja T(Nm) Gambar 2.4 Karakteristik Mekanis : n= f (T) 2.1.4 Pengasutan 2.1.4.1 Pengasutan Direct On Line (DOL) Direct On Line (DOL) adalah metode starting (pengasutan) yang paling umum digunakan di industri. Peralatan pengasutan hanya terdiri dari sebuah kontaktor utama dan termal atau relay elektronik arus lebih (electronic overload relay). Kerugian dari metode ini adalah dapat diperoleh arus starting yang sangat tinggi. Kalau jangkar belum bergerak, padahal jangkar biasanya mempunyai tahanan yang sangat kecil, maka pada saat start arus jangkar (Ia) besar. Ist Vs ............................................................................................... (2.7) Ra Rsh Ra Rsh Arus starting ini sendiri sangat besar dan dapat merusak kumparan jangkar. Jika motor yang digunakan kecil, maka bisa cepat berputar karena kelembaman motornya kecil. Hal tersebut juga berlaku sama untuk arus asutnya pula. Untuk motor DC Shunt sendiri, arus starting DOL ini sendiri bisa mencapai 2 sampai 5 kali arus nominal motor. Nilai arus tergantung pada desain dan ukuran dari motor, tapi secara umum, motor dengan daya yang lebih besar memberikan nilai arus starting yang lebih tinggi daripada motor dengan daya yang lebih rendah. Selama starting Direct On Line (DOL), torsi starting juga sangat tinggi. Torsi adalah tenaga yang dibutuhkan untuk memutar motor dan torsi yang tinggi diperlukan untuk memberikan tenaga 10 tekanan yang tinggi pada kopling dan penggunaan lainnya. Tentu, ada kasus di mana metode ini mulai bekerja dengan sempurna dan dalam beberapa kasus juga hanya ada satu metode starting yang bekerja. T Torsi Maximum Torsi starting Torsi nominal rpm Gambar 2.5 Grafik Torsi Fungsi Kecepatan Pada Sistem Pengasutan DOL I (A) I starting I nominal rpm Gambar 2.6 Grafik Arus Fungsi Kecepatan Pada Sistem Pengasutan DOL 2.1.4.2 Pengasutan soft starter Sebuah Pengasutan soft starter memiliki karakteristik yang berbeda dengan metode pengasutan lainnya. Pengasutan soft starter memiliki thyristor atau MOSFET dalam sirkuit utama, dan tegangan motor diatur melalui thyristor atau MOSFET tadi. Namun bila komponen driver yang digunakan adalah thyristor, maka pengaturan sudut alpha maupun duty cycle cukup sulit untuk dilakukan. Hal ini terjadi karena beban yang digunakan adalah beban induktif (motor), dimana gelombang tegangan akan leading terhadap gelombang arus. Tegangan input untuk motor yang terlebih dulu melalui MOSFET diatur dengan cara mengatur duty cycle atau waktu penyulutan. Penyulutan atau trigger tadi nantinya akan memotong gelombang tegangan DC rata yang keluar dari rangkaian 11 penyerah, mulai dari duty cycle 10 %, 20 %, 30%, 40%, 50%, 60%, 70%, 80%, 90%, hingga 100 %. Adapun pengaturan duty cycle tadi dilakukan dan diproses melalui mikrokontroler ATMega 16. Pengasutan soft starter menimbulkan fakta bahwa ketika tegangan motor rendah selama pengasutan, maka arus pengasutan dan torsi pengasutan juga kecil. Pada awal penyalaan, tegangan awal yang disuplai untuk motor sangat rendah sehingga hanya mampu memberikan Torsi yang kecil pula. Dengan kata lain, sentakan tidak perlu terjadi selama pengasutan. Secara bertahap, tegangan dan torsi meningkat sehingga mesin mulai berputar hingga ke kecepatan nominalnya. Salah satu keuntungan dengan metode pengasutan ini adalah kemungkinan untuk menyesuaikan torsi yang digunakan ke torsi yang dibutuhkan. Secara prinsip torsi pengasutan penuh telah tersedia, tapi dengan perbedaan besar bahwa prosedur pengasutan soft starter jauh lebih cocok untuk mesin penggerak, dengan biaya pemeliharaan yang juga lebih rendah. I (A) I nominal I starting rpm Gambar 2.7 Grafik Arus Arus Fungsi Kecepatan Pada Sistem Pengasutan Soft Starter 2.2. Power Supply 2.2.1 Transformator Transformator (trafo) adalah alat yang digunakan untuk menaikkan atau menurunkan tegangan bolak-balik (AC). Transformator terdiri dari 3 komponen pokok yaitu: kumparan pertama (primer) yang bertindak sebagai input, kumparan kedua (skunder) yang bertindak sebagai output, dan inti besi yang berfungsi untuk memperkuat medan magnet yang dihasilkan. 12 Prinsip kerja dari sebuah transformator adalah sebagai berikut. ketika kumparan primer dihubungkan dengan sumber tegangan bolak-balik, perubahan arus listrik pada kumparan primer menimbulkan medan magnet yang berubah. Medan magnet berubah diperkuat oleh adanya inti besi dan dihantarkan inti besi ke yang kumparan sekunder, sehingga pada ujung-ujung kumparan sekunder akan timbul ggl induksi. Efek ini dinamakan induktansi timbal-balik (mutual inductance). Hubungan antara tegangan primer, jumlah lilitan primer, tegangan sekunder, dan jumlah lilitan sekunder, dapat dinyatakan dalam persamaan: Vp Np .......................................................................................................... (2.8) Vs Ns Gambar 2.8 Rangkaian Transformator (trafo) Vp = tegangan primer (volt) Vs = tegangan sekunder (volt) Np = jumlah lilitan primer Ns = jumlah lilitan sekunder Berdasarkan perbandingan antara jumlah lilitan primer dan jumlah lilitan skunder transformator ada dua jenis yaitu: 1) Transformator step up yaitu transformator yang mengubah tegangan bolakbalik rendah menjadi tinggi, transformator ini mempunyai jumlah lilitan kumparan sekunder lebih banyak daripada jumlah lilitan primer (Ns > Np). 2) Transformator step down yaitu transformator yang mengubah tegangan bolakbalik tinggi menjadi rendah, transformator ini mempunyai jumlah lilitan kumparan primer lebih banyak daripada jumlah lilitan sekunder (Np > Ns). 13 Pada transformator (trafo) besarnya tegangan yang dikeluarkan oleh kumparan sekunder adalah: 1) Sebanding dengan banyaknya lilitan sekunder (Vs Ns), 2) Sebanding dengan besarnya tegangan primer (VS VP), 3) Berbanding terbalik dengan banyaknya lilitan primer, Sehingga dapat dituliskan: Vs 1 .......................................................................................................... (2.9) Np Dari persamaan 2.9 didapat : Vs Ns Vp ................................................................................................. (2.10) Np 2.2.2 Dioda bridge Penyearah (rectifier) merupakan salah satu jenis alat yang mengubah energi listrik dari sistem arus bolak-balik (AC) menjadi sistem arus searah (DC). Adapun komponen utama yang digunakan dalam sistem penyearah ialah dioda atau thyristor. Dalam suatu sistem penyearah jika semua komponen aktif yang digunakan berupa dioda, maka sistem penyearah tersebut digolongkan sebagai penyearah yang tidak dapat dikontrol (uncontrolled rectifier). Tegangan keluaran dari sistem penyearah tersebut hanya ditentukan oleh besar (amplitudo) tegangan sumber AC-nya. Akan tetapi, bila sebagian atau semua dari komponen aktif yang digunakan adalah thyristor atau SCR (Silicon Controller Rectifier), maka penyearah ini digolongkan sebagai penyearah yang dapat dikontrol (Controlled Rectifier). Penyearah gelombang penuh model jembatan memerlukan empat buah dioda. Dua diode akan berkondusi saat isyarat positif dan dua diode akan berkonduksi saat isyarat negatif. Untuk model penyearah jembatan ini kita tidak memerlukan transformator yang memiliki center-tap. Seperti ditunjukkan pada gambar 2.9, bagian masukan AC dihubungkan pada sambungan D1-D2 dan yang lainnya pada D3-D4. Katode D1 dan D3 14 dihubungkan dengan keluaran positif dan anode D2 dan D4 dihubungkan dengan keluaran negatif (tanah). Misalkan masukan AC pada titik A berharga positif dan B berharga negatif, maka diode D1 akan terbias maju dan D2 akan terbias mundur. Pada sambungan bawah D4 terbias maju dan D3 terbias mundur. Pada keadaan ini elektron akan mengalir dari titik B melalui D4 ke beban , melalaui D1 dan kembali ke titik A. Pada setengah periode berikutnya titik A menjadi negatif dan titik B menjadi positif. Pada kondisi ini D2 dan D3 akan berpanjar maju sedangkan D1 dan D4 akan berpanjar mundur. Aliran arus dimulai dari titik A melalui D2, ke beban, melalui D3 dan kembali ke titik B. Perlu dicatat di sini bahwa apapun polaritas titik A atau B, arus yang mengalir ke beban tetap pada arah yang sama. Adapun persamaan rumus dari tegangan keluaran rangkaian penyerah gelombang penuh tidak terkendali adalah sebagai berikut : VDC 2Vm ..................................................................................................... (2.11) Gambar 2.9 adalah penyearah gelombang penuh model jembatan. Rangkaian jembatan empat diode dapat ditemukan di pasaran dalam bentuk paket dengan berbagai bentuk. Secara prinsip masing-masing bentuk mempunyai dua terminal masukan AC dan dua terminal masukan DC. D1 D3 AC 1 FASA D4 Trafo Step Down D2 + - Kapasitor DC Rata Beban Gambar 2.9 Rangkaian Penyearah Gelombang Penuh Tidak Terkendali 2.2.3 Kapasitor Kapasitor adalah komponen elektronika yang digunakan untuk menyimpan muatan listrik yang terdiri dari dua konduktor dan di pisahkan oleh bahan penyekat (bahan dielektrik) tiap konduktor disebut keping. Kapasitor atau yang 15 sering disebut kondensator merupakan komponen listrik yang dibuat sedemikian rupa sehingga mampu menyimpan muatan listrik. Coulombs pada abad ke 18 menghitung bahwa 1 Coloumb = 6.25 1018 . Kemudian Michael Faraday membuat postulat bahwa sebuah kapasitor akan memiliki kapasitansi sebesar 1 Farad jika dengan tegangan 1 volt dapat memuat muatanelektron sebanyak 1 Coulomb. Bentuk persamaan untuk menghitung muatan capasitor adalah : Q C V ....................................................................................................... (2.12) Dimana : Q = muatan elektron dalam C Coulombs C = Nilai kapasitansi dalam F (Farad) V = Besaran Tegangan dalam V (Volt) Prinsip sebuah kapasitor pada umumnya sama halnya dengan resistor yang juga termasuk dalam kelompok komponen pasif, yaitu jenis komponen yang bekerja tanpa memerlukan arus panjar. Kapasitor terdiri atas dua konduktor (lempeng logam) yang dipisahkan oleh bahan penyekat (isolator). Isolator penyekat ini sering disebut sebagai bahan (zat) dielektrik. Adapun struktur kapasitor dapat dilihat seperti pada gambar 2.12 Gambar 2.10 Struktur Kapasitor Fungsi Kapasitor adalah sebagai penyimpan arus/tegangan listrik. Untuk arus DC kapasitor berfungsi sebagai isulator/penahan arus listrik, sedangkan untuk arus AC Kapasitor berfungsi sebagai konduktor/melewatkan arus listrik. Dalam penerapannya kapasitor digunakan sebagai filter/penyaring, perata tegangan DC yang di gunakan untuk mengubah tengangan AC ke DC, pembangkit gelombang ac atau oscilator dan sebagainya. 16 Kegunaan kapasitor dalam rangkaian elektronika sangat di perlukan terutama untuk mencegah loncatan bunga api listrik pada rangkaian yang mengandung kumparan, menyimpan muatan atau energi listrik dalam rangkaian, memilih panjang gelombang pada radio penerima dan sebagai filter dalam catu daya (power supply). 2.3 Komponen Switching (MOSFET) MOSFET (Metal Oxide Field Effect Transistor) merupakan komponen yang terdiri dari tiga terminal yang disebut gerbang (gate), drain dan sumber (source). Antara drain dan sumber ada bahan substrat. Bahan substrat ini yang akan mengalirkan arus dari drain ke sumber. Konduktifitas bahan substrat ditentukan oleh tegangan yang diberikan antara gate dan source. MOSFET dikendalikan oleh tegangan dan memiliki impedansi masukan yang sangat tinggi. Gate akan mengalirkan arus bocor yang sangat kecil pada orde nanoampere. Walaupun MOSFET memiliki impedansi yang sangat tinggi, MOSFET masih bisa memberikan tegangan gate ke source. Hal ini akan mempengaruhi sifat konduktivitas substrat yang ada di dalam MOSFET. MOSFET memiliki masalah pengosongan elektro statis karena substrat yang di dalamnya bersifat menyimpan muatan. D Gerbang Drain Sumber n n G bahan substrat S Gambar 2.11 Simbol MOSFET Konstruksi MOSFET Gambar 2.12 Konstruksi MOSFET Karakteristik dapat menjelaskan keistimewaan atau ciri-ciri suatu komponen yang berdasarkan pada hasil rangakain pengujian yang akurat. Karakteristik juga dapat mengindikasikan batasan (range) besaran nilai yang digunakan pada suatu komponen tersebut. Hal ini tentu sangat berguna untuk menetukan pemakaian 17 suatu komponen terhadap kebutuhan suatu sistem. Adapun beberapa parameter penting yang dapat digunakan untuk menetukan penggunaan MOSFET adalah : 1) Drain-Source voltage (VDS); Nilai tegangan maksimum yang akan mengkonduksi bahan substrat yang ada di antara drain dan source agar arus dapat mengalir dari drain ke sumber. 2) Countinuous direct drain current (ID); Nilai arus maksimum yang dapat melewati kanal drain. 3) Gate-Source voltage (VGS); Nilai tegangan yang lebih besar dari nilai tegangan konduksi (VT) agar MOSFET pada kondisi ON dan dapat mengalirkan arus. 4) Total power dissipation (Ptot or PD); Nilai maksimum disipasi daya untuk komponen tersebut. Pada dasarnya fungsi MOSFET dapat dibagi dua, yaitu sebagai saklar dan sebagai penguat arus. Sebagai saklar, MOSFET dapat mengalirkan arus jika diberikan tegangan gerbang-sumber (VGS) yang lebih besar dari tegangan konduksi (VT). Saat VGS < VT maka MOSFET OFF, saat VGS > VT maka MOSFET ON. Kecepatan switching sangat tinggi dalam orde nanodetik. Dalam aplikasinya penulis menggunakan MOSFET enhancement tipe kanal-n. MOSFET tipe enhancement tidak memiliki kanal doping yang menghubungkan antara silicon drain dan sumber secara fisik. Kanal akan terbentuk dengan memberikan VGS. MOSFET tipe enhancement bisa diibaratkan sebuah saklar terbuka, yang akan tertutup apabila diberi VGS yang lebih dari tegangan konduksi MOSFET itu sendiri. Karakteristik MOSFET tipe enhancement kanal-n dapat dilihat pada gambar 2.13. 18 ID (mA) ID (mA) VGS = 7 8 8 VGS = 6 VGS = 5 VGS = 4 1 2 3 4 5 6 7 (a) VGS = 3 VGS = 2 VDS VGS = VT =1 VGS (b) Karakteristik MOSFET tipe enhancement kanal-n Gambar 2.13 Karakteristik MOSFET (a) ID = f (VGS) (b) ID = f (VDS) Pada MOSFET tipe enhancement kanal-n. tegangan pada drain lebih positif dari pada tegangan pada source. Dan sumber diberi tegangan yang lebih negatif dari pada gate. Jika VGS di-set pada 0 V maka arus keluaran (ID) yang dihasilkan = 0 A (MOSFET OFF). MOSFET akan mengalirkan arus apabila diberi V GS yang lebih besar dari tegangan konduksi/ disebutkan juga tegangan Tresh hold (VT). Arus akan mengalir dari drain ke source. Apabila VGS diperbesar terus maka arus drain ID akan lebih besar, dan karakteristik kenaikan arusnya terlihat seperti pada gambar 2.13. Perbedaan MOSFET tipe enhancement kanal-p dan kanal-n, adalah terletak pada polaritas dan arah arus yang mengalir. Parameter yang bisa didapat : ID = k(VGS-VT)2 .............................................................................................. (2.13) k I D (on) ....................................................................................... (2.14) (VGS (on) vT ) 2 2.4 Rangkaian Kontrol Rangkaian kontrol adalah rangkaian yang berfungsi untuk mengatur dan menghasilkan gelombang pulsa berupa PWM yang nantinya akan diteruskan ke MOSFET (driver) untuk kemudian mencacah tegangan keluaran dari power supply. Adapun rangkaian kontrol itu sendiri terdiri dari mikrokontroler ATMega 16 dan optocoupler. 19 2.4.1 Sismin (sistem minimum) mikrokontroler ATMega 16 2.4.1.1 Pulse Width Modulation (PWM) Pulse Width Modulation (PWM) adalah teknik mendapatkan efek sinyal analog dari sebuah sinyal digital yang terputus-putus. PWM dapat dibangkitkan hanya dengan menggunakan digital i/o yang difungsikan sebagai output. Gambar 2.14 Contoh PWM Dengan Duty Cycle 50% Gelombang di atas dikatakan memiliki duty cycle 50%. Duty cycle adalah perbandingan antara lebar sinyal high dengan lebar keseluruhan siklus (cycle). Pada ATMEGA 16 ada 2 cara membangkitkan PWM, yang pertama PWM dapat dibangkitkan dari port input/ outputnya yang difungsikan sebagai output. Kedua adalah dengan memanfaatkan fasilitas PWM dari fungsi timer/ counter yang telah disediakan. Dengan adanya fasilitas ini proses pengaturan waktu high/low sinyal digital tidak akan mengganggu urutan program lain yang sedang dieksekusi oleh processor. Selain itu, dengan menggunakan fasilitas ini kita tinggal memasukkan berapa porsi periode waktu on dan off gelombang PWM pada sebuah register. OCR1A, OCR1B dan OCR2 adalah register tempat mengatur duty cycle PWM. Adapun duty cycle dapat dihitung melalui persamaan 2.15. DutyCycle T (on) 100% ............................................................. (2.15) T (on) T (off ) 2.4.1.2 AVR ATMega 16 AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general-purpose, timer/Counter fleksibel dengan mode compare, interrupt internal dan eksternal, serial UART, programmable Watchdog Timer, dan mode power saving, ADC dan PWM internal. AVR juga mempunyai In-System Programmable Flash on-chip 20 yang mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI. ATMega16. ATMega16 mempunyai throughput mendekati 1 MIPS per MHz membuat disainer sistem untuk mengoptimasi konsumsi daya versus kecepatan proses. Beberapa keistimewaan dari AVR ATMega16 antara lain: 1) Sistem Mikrokontroler AVR 8 bit yang memiliki kemampuan tinggi dengan daya rendah. 2) CPU yang terdiri atas 32 register. 3) Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi 16 MHz. 4) Memiliki kapasitas flash memori 16 Kbyte, SRAM 1 Kbyte, dan EEPROM 512 byte. 5) Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D. 6) Unit interupsi internal dan eksternal. 7) Port USART untuk komunikasi serial. 8) Fitur Peripheral, antara lain: a) Tiga buah Timer/Counter dengan kemampuan perbandingan. b) Analog to Digital Converte (ADC)) 10 bit sebanyak 8 channel. c) Real time Counter dengan Oscilator tersendiri. d) Empat channel PWM. e) Watchdog timer dengan Oscilator internal. f) Byte-oriented Two-Wire Serial Interface. g) Port antarmuka SPI. h) Tegangan operasi 2,7 V – 5,5 V pada ATMega16L. 2.4.1.3 Konfigurasi pin AVR ATMega16 Pin-pin pada ATmega16 dengan kemasan 40-pin DIP (dual in line package) ditunjukkan oleh gambar 2.16 Kemasan pin tersebut terdiri dari 4 Port yaitu Port A, Port B, Port C,Port D yang masing masing Port terdiri dari 8 buah pin. Selain itu juga terdapat RESET, VCC, GND 2 buah, VCC, AVCC, XTAL1, XTAL2 dan AREF. 21 Gambar 2.15 Konfigurasi Pin ATMega 16 Diskripsi dari pin-pin ATmega16 adalah sebagai berikut : 1) VCC : Suplai tegangan digital. 2) GND : Ground 3) Port A; Port A sebagai input analog ke A/D konverter. Port A juga sebagai 8 bit bi-directional port I/O, jika A/D konverter tidak digunakan. Pin-pin port dapat menyediakan resistor-resistor internal pull-up. Ketika port A digunakan sebagai input dan pull eksternal yang rendah akan menjadi sumber arus jika resistor- resistor pull-up diaktifkan. Pin-pin port A adalah tri-state ketika kondisi reset menjadi aktif sekalipun clock tidak aktif. 4) Port B; Port B adalah port I/O 8-bit bi-directional dengan resistor-resistor internal pull-up. Buffer output port B mempunyai karakteristik drive yang simetris dengan kemampuan keduanya sink dan source yang tinggi. Sebagai input, port B yang mempunyai pull eksternal yang rendah akan menjadi sumber arus jika resistor- resistor pull-up diaktifkan. Pin-pin port B adalah tristate ketika kondisi reset menjadi aktif sekalipun clock tidak aktif. 5) Port C; Port C adalah port I/O 8-bit bi-directional dengan resistor-resistor internal pull-up. Buffer output port C mempunyai karaketristik drive yang simetris dengan kemampuan keduanya sink dan source yang tinggi. Sebagai 22 input, port C yang mempunyai pull eksternal yang rendah akan menjadi sumber arus jika resistor- resistor pull-up diaktifkan. Pin-pin port C adalah tri-state ketika kondisi reset menjadi aktif seklipun clock tidak aktif. Jika antarmuka JTAG enable, resistor- resistor pull-up pada pin-pin PC5(TDI), PC3(TMS), PC2(TCK) akan diktifkan sekalipun terjadi reset. 6) Port D; Port D adalah port I/O 8-bit bi-directional dengan resistor-resistor internal pull-up. Buffer output port D mempunyai karaketristik drive yang simetris dengan kemampuan keduanya sink dan source yang tinggi. Sebagai input, port D yang mempunyai pull eksternal yang rendah akan menjadi sumber arus jika resistor- resistor pull-up diaktifkan. Pin-pin port D adalah tri state ketika kondisi reset menjadi aktif sekalipun clock tidak aktif. 7) Reset : Sebuah low level pulsa yang lebih lama daripada lebar pulsa minimum pada pin ini akan menghasilkan reset meskipun clock tidak berjalan. 8) XTAL1: Input inverting Oscilator dan input intenal clock operasi 9) XTAL2: Output dari inverting penguat Oscilator. 10) AVCC : Pin supply tegangan untuk Port A dan A/D converter. Sebaiknya eksternalnya dihubungkan ke VCC meskipun ADC tidak digunakan. Jika ADC digunakan seharusnya dihubungkan ke VCC melalui low pass filter. 11) AREF : Pin referensi analog untuk A/D konverter. 2.4.1.4 Arsitektur ATMega 16 Mikrokontroler AVR menggunakan konsep arsitektur Harvard yang memisahkan memori dan bus untuk data dan program untuk memaksimalkan kemampuan dan kecepatan. Instruksi dalam memori program dieksekusi dengan pipelining single level. Dimana ketika satu instruksi dieksekusi, instruksi berikutnya diambil dari memori program. Konsep ini mengakibatkan instruksi dieksekusi setiap clock cycle. Selain itu, mikrokontroler AVR juga mengimplementasikan RISC sehingga eksekusi instruksi dapat berlangsung sangat cepat dan efisien. 23 Gambar 2.16 Diagram Blok ATMega 16 2.4.1.5 Serial pada ATMega16 Universal synchronous dan asynchronous pemancar dan penerima serial adalah suatu alat komunikasi serial sangat fleksibel. Jenis yang utama adalah : 1) Operasi full duplex (register penerima dan pengirim serial berdiri sendiri) 2) Operasi Asychronous atau synchronous 3) Master atau Slave mendapat clock dengan operasi synchronous 4) Pembangkit baud rate dengan resolusi tinggi 5) Dukung frames serial dengan 5, 6, 7, 8 atau 9 Data bit dan 1 atau 2 Stop bit 24 6) Tahap odd atau even parity dan parity check didukung oleh hardware 7) Pendeteksian data overrun 8) Pendeteksi framing error 9) Pemfilteran gangguan (noise) meliputi pendeteksian bit false start dan pendeteksian low pass filter digital 10) Tiga interrupt terdiri dari TX complete, TX register empty dan RX complete. 11) Mode komunikasi multi-processor 12) Mode komunikasi double speed asynchronous 2.4.1.6 Sistem minimum ATMega 16 Sistem minimum terdiri dari komponen-komponen dasar yang dibutuhkan oleh suatu mikrokontroler untuk dapat berfungsi dengan baik. Pada umumnya, suatu mikrokontroler membutuhkan tiga elemen untu berfungsi yaitu power supply, kristal oscillator (XTAL), dan Rangkaian RESET. 1) Power Supply; Catu daya merupakan nyawa bagi sismin ATMega 16. Tanpa catu daya, komponen sismin ini tidak akan pernah berfungsi. Catu daya untuk sismin ini adalah tegangan DC yang inputnya diberi 5 Volt DC. 2) Oscillator; Analogi fungsi kristal oscillator adalah jantung pada tubuh manusia, perbedaan jantung memompa darah dan seluruh kandungannya sedangkan XTAL memompa data. Kristal yang digunakan 16 MHz, lebih dari 0,9 MHz sehingga kapasitor yang dipasang masing – masing bernilai 22 pF. Mode operasi kristal dapat dilihat pada tabel 2.1. berikut. Tabel 2.1 Mode Operasi Osilator Kristal 25 Gambar 2.17 Rangkaian Kristal Untuk kombinasi asinkron maka digunakan seting baudrate 9600 bps karena yang digunakan 16 MHz sehingga error yang terjadi hanya 0,2%. kristal Tabel 2.2 Contoh Pengaturan Frekuensi Osilator Untuk 16 MHz 2.4.2 Optocoupler Optocoupler merupakan piranti elektronika yang berfungsi sebagai pemisah rangkaian power dengan rangkaian kontrol. Optocoupler merupakan salah satu jenis komponen yang memanfaatkan sinar sebagai pemicu on/off-nya. Opto berarti optic dan coupler berarti pemicu. Sehingga bisa diartikan bahwa optocoupler merupakan suatu komponen yang bekerja berdasarkan picu cahaya optic optocoupler termasuk dalam sensor, dimana terdiri dari dua bagian yaitu transmitter dan receiver. 26 Bagian pemancar atau transmitter dibangun dari sebuah LED infra merah untuk mendapatkan ketahanan yang lebih baik daripada menggunakan led biasa. Sensor ini bisa digunakan sebagai isolator dari rangkaian tegangan rendah ke rangkaian tegangan tinggi. Selain itu juga bisa dipakai sebagai pendeteksi adanya penghalang antara transmitter dan receiver dengan memberi ruang uji di bagian tengah antara led dengan photo transistor. Gambar 2.19 Konfigurasi Pin Optocoupler Keterangan : 1. NC 2. Anoda 3. Katoda 4. NC 5. Ground 6. NC 7. Vo 8. Vo (Output)