rancang bangun modul praktikum operational amplifier
advertisement

HALAMAN JUDUL
TUGAS AKHIR – TF 145565
RANCANG BANGUN MODUL
OPERATIONAL AMPLIFIER
PRAKTIKUM
Arief Satyo Priyantoro
NRP. 2413 031 076
Dosen Pembimbing
Dr. Ir. Purwadi Agus Darwito, MSc
NIP. 19620822 198803 1 001
PROGRAM STUDI D3 METROLOGI DAN INSTRUMENTASI
JURUSAN TEKNIK FISIKA
Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember
Surabaya 2017
ALAMAN JUDUL
FINAL PROJECT TF 145565
PROTOTYPE OF EXPERIMENT MODULE
OPRATIONAL AMPLIFIER
Arief Satyo Priyantoro
NRP. 2413 031 076
Advisor Lecturer
Dr. Ir. Purwadi Agus Darwito, MSc
NIP. 19620822 198803 1 001
Study Program Of D3 Metrology And Instrumentation
Department of Engineering Physics
Faculty of Industrial Technology
Sepuluh Nopember Institute of Technology
Surabaya 2017
ii
LEMBAR PENGESAHAN
RANCANG BANGUN MODIJL PRAKTIKUM
OPERATIONAL AMPLIFIER
TUGAS AKHIR
O leh :
Arief Satvo Privantoro
NRP. 2413 031 076
Surabaya, 18 Januari 2017
Menyetujui,
Dosen Pembimbing
Dr. Ir. Purwadi Aeus Darwito. M.Sc
NIP. 19620822 198803 1 001
Ketua Program Studi
D3 Metrologi dan Instrumentasi
IN 11*. !9 7 J 1 0 ^ r2 § ^ U f 0 0 2
NIP. 19620822 198803 1 001
iii
IIAl\< 'ANG BANGUN MODUL PRAKTIKUM
OPERATIONAL AMPLIFIER
TUGAS AKHIR
I>iajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Ahli Madya
Pada
Program Studi D3 Metrologi dan Instrumentasi
Jurusan Teknik Fisika
Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember
O leh:
Arief Satyo Priyantoro
NRP. 2413 031 076
i >isclujui oleh Tim Penguji Tugas Akhir :
I I)r Ir. Purwadi Agus Darwito, M Sg^^^^V em bim bing)
’ 11 Tutug Dhanardono, MT
Tim Penguji)
t Arief Abdurrakhman, ST, MT
(Penguji I)
4. Ilerry Sufyan Hadi, ST, MT
^PenguJi n)
5. Murry Raditya, ST, MT
(Penguji III)
SURABAYA
JANUARI 2017
IV
RANCANG BANGUN MODUL PRAKTIKUM
OPERATIONAL AMPLIFIER
Nama
NRP
Jurusan
: Arief Satyo Priyantoro
: 2413031076
: D3 Metrologi dan Instrumentasi, Teknik
Fisika, ITS Surabaya
Pembimbing : Dr. Ir. Purwadi Agus Darwito, MSc
ABSTRAK
Berbagai macam perangkat elektronik dikembangkan untuk
memudahkan manusia dalam beraktifitas, berkomunikasi, dan
menyampaikan informasi. Adapun beberapa perangkat tersebut
seperti komputer, kalkulator, radio, pengeras suara, dan lain
sebagainya. Untuk membuat perangkat-perangkat elektronik
tersebut komponen-komponen elektronik dirangkai menjadi satu
sehingga dapat berfungsi sesuai dengan kegunaannya. Dari
berbagai komponen elektronik yang digunakan, operational
amplifier merupakan salah satu dari komponen yang sering
dijumpai pada perangkat elektronik yang digunakan sehari-hari.
Pada tugas akhir ini akan dilakukan monitoring tegangan dc
berbasis mikrokontroler ATMega128 pada modul operational
amplifier, yang dimonitoring adalah output dari keluaran dari
modul operational amplifier. Pada sistem monitoring ini
menggunakan mikrokontroler ATMega128 sebagai alat pemroses
sinyal analog ke digital maupun sebaliknya dan setelah
dilakukan monitoring, didapat Nilai Ketidakpastian, akurasi, dan
koreksi dari pembacaan rangkaian pembagi tegangan sebesar 0.17;
97.71%; 0.374. Berdasarkan dari hasil yang didapat, alat dapat
dikatakan dalam keadaan baik.
Kata kunci : Operational Amplifier, Monitoring, ATMega128
v
PROTOTYPE OF EXPERIMENT MODULE OPRATIONAL
AMPLIFIER
Name
NRP
Program study
Advisor Lecturer
: Arief Satyo Priyantoro
: 2413031076
: Diploma of Metrology and
Instrumentasi, Engineering Physics
FTI-ITS
: Dr. Ir. Purwadi Agus Darwito, MSc
ABSTRACT
Many of electronic devices were developed to make it
easier for people in work, communicate, and convey information.
As for some devices such as computers, calculators, radios,
loudspeakers, etc. To make electronic devices the electronic
components assembled into one so can be function accordance
with its use. Of the various electronic components are used, the
operational amplifier is one of the components that are commonly
found in electronic devices that are used everyday. In this Final
Project will be done monitoring dc voltage based microcontroller
ATMega128 on output of operational amplifier module, monitoring
system are using microcontroller ATMega128 as analogue to
digital signal processing or otherwise and, after monitoring that
got uncertainity value, accuracy, and correction from reading of
voltage divider circuits 0.17; 97.71%; 0.374. Based of the results
obtained, the measuring tool can be said in good condition.
Keywords : Operational Amplifier, Monitoring, ATMega128
vi
KATA PENGANTAR
Puji syukur kehadirat Allah SWT, berkat rahmat dan karuniaNya penulis dapat menyelesaikan Tugas Akhir beserta Laporan
Tugas Akhir yang berjudul “RANCANG BANGUN MODUL
PRAKTIKUM OPERATIONAL AMPLIFIER”. Penulis
mengucapkan terima kasih kepada pihak yang telah membantu
dalam pelaksanaan dan penyusunan laporan Tugas Akhir ini.
Untuk itu penulis mengucapkan terimakasih atas bantuan dan
motivasi kepada :
1. Kedua Orang tua saya yang selalu memberikan dukungan baik
secara materiil, moril, dan doa, dan juga selalu memberikan
semangat kepada penulis sehingga dapat menyelesaikan
Tugas Akhir ini.
2. Bapak Agus Muhamad Hatta, ST, MSi, Ph.D selaku ketua
Jurusan Teknik Fisika ITS.
3. Bapak Dr. Ir. Purwadi Agus Darwito, MSc selaku Ketua
Program Studi Diploma III Metrologi dan Teknik
Instrumentasi, Institut Teknologi Sepuluh Nopember yang
juga telah menjadi Dosen Pembimbing yang selalu
memberikan bimbingan, arahan dan motivasi dalam
pengerjaan tugas akhir.
4. Bapak Andi Rahmadiansah ST. M.T selaku dosen wali yang
membimbing selama menjalani masa perkuliahan.
5. Bapak dan Ibu dosen Teknik Fisika yang telah menambah
wawasan penulis selama perkuliahan
6. Seluruh staff Jurusan Teknik Fisika yang telah membantu
penuli dalam administrasi selama perkuliahan.
7. Sahabat JMMII yang selalu mendukung serta memberikan
motivasi dalam pembuatan tugas akhir.
8. Teman-teman seperjuangan dan satu angkatan F48 yang
selalu mendukung dan memotivasi penulis.
9. Rekan-rekan yang membantu kelancaran pembuatan Tugas
Akhir.
vii
.Penulis menyadari bahwa penulisan laporan Tugas Akhir ini
tidaklah sempurna tetapi penulis berharap laporan ini dapat
memberikan kontribusi yang berarti bagi pembacanya.
Surabaya, 20 Januari 2017
Penulis
viii
DAFTAR ISI
HALAMAN JUDUL................................................................ i
LEMBAR PENGESAHAN .................................................... iii
ABSTRAK................................................................................ v
KATA PENGANTAR ............................................................. vii
DAFTAR ISI ............................................................................ ix
DAFTAR GAMBAR ............................................................... xi
DAFTAR TABEL .................................................................... xiv
BAB I PENDAHULUAN ........................................................ 1
1.1 Latar Belakang................................................................... 1
1.2 Rumusan Masalah.............................................................. 1
1.3 Batasan Masalah ................................................................ 2
1.4 Tujuan Penelitian ............................................................... 2
1.5 Sistematika Laporan .......................................................... 2
BAB II TEORI PENUNJANG ............................................... 5
2.1 Operational Amplifier........................................................ 5
2.2 Teori Pembagi Tegangan ................................................... 14
2.3 LCD (Liquid Crystal Display) 16x2 .................................. 14
2.4 Modul SD Card.................................................................. 15
2.5 Mikrokontroler ATMega 128 ............................................ 16
2.6 Analog Digital Converter .................................................. 17
2.7 Karakteristik Alat Ukur ..................................................... 18
2.8 Analisis Ketidakpastian ..................................................... 21
BAB III PERANCANGAN DAN PEMBUATAN ALAT .... 25
3.1 Perancangan Sistem ........................................................... 25
3.1.1 Perancangan Modul Praktikum Operational
Amplifier ............................................................................ 26
3.2 Perancangan Hardware ...................................................... 27
3.2.1 Perancangan Sensor Tegangan ................................. 27
3.2.2 Perancangan ATMega128 ........................................ 30
3.3 Perancangan Software ....................................................... 31
3.3.1 Sketch ATMega128 ................................................. 31
ix
3.4 Langkah-langkah Penggunaan Modul Praktikum Operational
Amplifier .............................................................................. 33
BAB IV ANALISIS DATA .................................................... 39
4.1 Analisis Data ...................................................................... 39
4.1.1 Penempatan Alat Ukur .............................................. 39
4.1.2 Pengujian Alat Pengukur Tegangan ......................... 39
4.1.3 Pengambilan Data ..................................................... 47
4.2 Pembahasan ....................................................................... 64
BAB V PENUTUP ................................................................... 65
5.1 Kesimpulan ....................................................................... 65
5.2 Saran .................................................................................. 65
DAFTAR PUSTAKA
LAMPIRAN A (Pengujian Sensor)
LAMPIRAN B (Datasheet LM358)
LAMPIRAN C (Datasheet ATMEGA128A)
LAMPIRAN D (Listing Program ATMega128 pada Codevision)
BIOGRAFI PENULIS
x
DAFTAR GAMBAR
Gambar 2.1 Simbol Operational Amplifier ............................. 5
Gambar 2.2 Circuit Diagram operational amplifier LM741 ... 6
Gambar 2.3 Grafik Saturation Op-amp .................................... 6
Gambar 2.4 Rangkaian Inverting Amplifier ............................ 7
Gambar 2.5 Rangkaian Non-Inverting Amplifier .................... 8
Gambar 2.6 Rangkaian Differentiator ..................................... 8
Gambar 2.7 Rangkaian Integrator ........................................... 9
Gambar 2.8 Rangkaian Penjumlah Inverting ........................... 10
Gambar 2.9 Rangkaian Penjumlah Non Inverting ................... 11
Gambar 2.10 Rangkaian Pengurang ....................................... 11
Gambar 2.11 Rangkaian High Pass Filter ................................ 12
Gambar 2.12 Rangkaian Low Pass Filter ................................ 13
Gambar 2.13 Rangkaian Buffer ............................................... 13
Gambar 2.14 Rangkaian Pembagi Tegangan ........................... 14
Gambar 2.15 LCD 16x2........................................................... 15
Gambar 2.16 Modul SD Card .................................................. 15
Gambar 2.17 Konfigutasi ATMega 128A ............................... 16
Gambar 2.18 Analog Digital Convertion ................................. 17
Gambar 2.19 Karakteristik Output Instrumen Linier ............... 18
Gambar 2.20 Grafik non-linieritas ........................................... 19
Gambar 2.21 Penjelasan Akurasi dan Presisi (a) akurasi rendah
presisi rendah (b) akurasi rendah, presisi tinggi (c)
akurasi tinggi presisi tinggi ................................ 20
Gambar 3.1 Diagram Alir Penelitian Tugas Akhir .................. 25
Gambar 3.2 Diagram Alir Modul Praktikum Oprational
Amplifier ............................................................ 26
Gambar 3.3 Skematik Modul Oprational Amplifier ................ 28
Gambar 3.4 Rangkaian Pembagi Tegangan ............................. 28
Gambar 3.5 Sensor Tegangan .................................................. 28
Gambar 3.6 Sampling Sinyal Analog ...................................... 29
xi
Gambar 3.7 Modul Praktikum Op-amp Tampak Atas ............. 30
Gambar 3.8 Modul Praktikum Op-amp Tampak Atas ............. 30
Gambar 3.9 Skematik Minimum System ATmega128 ............ 31
Gambar 3.10 Flowchart Perancangan Sensor Tegangan ......... 32
Gambar 3.11 Flowchart Penggunaan Alat ............................... 33
Gambar 3.12 Rangkaian Opamp Inverting Pada Modul .......... 34
Gambar 3.13 Rangkaian Opamp Non-Inverting Pada Modul .. 35
Gambar 3.14 Rangkaian Opamp Integrator Pada Modul ........ 36
Gambar 3.15 Rangkaian Opamp Differeniator Pada Modul ... 36
Gambar 3.16 Rangkaian Opamp Summing Pada Modul .......... 37
Gambar 3.17 Rangkaian Opamp Differential Pada Modul ...... 38
Gambar 4.1 Penempatan alat ukur pada modul praktikum
operational amplifier ............................................. 39
Gambar 4.2 Pengujian Sensor Tegangan ................................. 40
Gambar 4.3 Grafik Pembacaan Standar dan Pembacaan alat .. 40
Gambar 4.4 Grafik pembacaan Alat dan Pembacaan Standar . 41
Gambar 4.5 Grafik Hysterisis .................................................. 43
Gambar 4.6 Opamp Non-Inverting Sinyal Sinusoida .............. 48
Gambar 4.7 Opamp Non-Inverting Sinyal Segitiga ................. 48
Gambar 4.8 Opamp Non-Inverting Sinyal Kotak .................... 49
Gambar 4.9 Opamp Non-Inverting Sinyal Ramp ..................... 50
Gambar 4.10 Opamp Non-Inverting Sinyal Pulse.................... 50
Gambar 4.11 Opamp Inverting Sinyal Sinusoida .................... 51
Gambar 4.12 Opamp Inverting Sinyal Segitiga ....................... 52
Gambar 4.13 Opamp Inverting Sinyal Kotak .......................... 53
Gambar 4.14 Opamp Inverting Sinyal Ramp........................... 53
Gambar 4.15 Opamp Inverting Sinyal Pulse............................ 55
Gambar 4.16 Opamp Summing Sinyal Sinusoida .................... 55
Gambar 4.17 Opamp Summing Sinyal Segitiga ....................... 56
Gambar 4.18 Opamp Summing Sinyal Kotak .......................... 56
Gambar 4.19 Opamp Summing Sinyal Ramp .......................... 57
Gambar 4.20 Opamp Summing Sinyal Pulse ........................... 58
xii
Gambar 4.21 Opamp Diferential Sinyal Sinusoida ................. 58
Gambar 4.22 Opamp Diferential Sinyal Segitiga .................... 59
Gambar 4.23 Opamp Diferential Sinyal Kotak ....................... 59
Gambar 4.24 Opamp Diferential Sinyal Ramp........................ 59
Gambar 4.25 Opamp Diferential Sinyal Pulse ........................ 60
Gambar 4.26 Opamp Differentiator Sinyal Kotak ................... 60
Gambar 4.27 Opamp Differentiator Sinyal Segitiga ............... 61
Gambar 4.28 Opamp Differentiator Sinyal Sinusoida ............. 61
Gambar 4.29 Opamp Differentiator Sinyal Ramp ................... 61
Gambar 4.30 Opamp Differentiator Sinyal Pulse .................... 62
Gambar 4.31 Opamp Integrator Sinyal Kotak ........................ 62
Gambar 4.32 Opamp Integrator Sinyal Segitiga ..................... 63
Gambar 4.33 Opamp Integrator Sinyal Sinusoida .................. 63
Gambar 4.34 Opamp Integrator Sinyal Ramp ......................... 63
Gambar 4.35 Opamp Integrator Sinyal Pulse.......................... 64
xiii
DAFTAR TABEL
Tabel 4.1 Data Karakteristik Statik Alat ............................... 41
Tabel 4.2 Data Kalibrasi ....................................................... 43
Tabel 4.3 Tabel Lanjutan ...................................................... 44
Tabel 4.4 Pembacaan Tegangan Sinyal Sinusoida................ 47
Tabel 4.5 Pembacaan Tegangan Sinyal Segitiga .................. 48
Tabel 4.6 Pembacaan Tegangan Sinyal Kotak...................... 49
Tabel 4.7 Pembacaan Tegangan Sinyal Ramp ...................... 49
Tabel 4.8 Pembacaan Tegangan Sinyal Pulse....................... 50
Tabel 4.9 Pembacaan Tegangan Sinyal Sinusoida................ 51
Tabel 4.10 Pembacaan Tegangan Sinyal Segitiga ................ 51
Tabel 4.11 Tabel Lanjutan .................................................... 52
Tabel 4.12 Pembacaan Tegangan Sinyal Kotak.................... 52
Tabel 4.13 Pembacaan Tegangan Sinyal Ramp .................... 53
Tabel 4.14 Pembacaan Tegangan Sinyal Pulse..................... 54
Tabel 4.15 Pembacaan Tegangan Sinyal Sinusoida.............. 54
Tabel 4.16 Tabel Lanjutan .................................................... 55
Tabel 4.17 Pembacaan Tegangan Sinyal Segitiga ................ 55
Tabel 4.18 Pembacaan Tegangan Sinyal Kotak.................... 56
Tabel 4.19 Pembacaan Tegangan Sinyal Ramp .................... 57
Tabel 4.20 Pembacaan Tegangan Sinyal Pulse..................... 57
xiv
BAB I
PENDAHULUAN
1.1 Latar Belakang
Berbagai macam perangkat elektronik dikembangkan untuk
memudahkan manusia dalam beraktifitas, berkomunikasi, dan
menyapaikan informasi. Adapun beberapa perangkat tersebut
seperti komputer, kalkulator, radio, pengeras suara, dan lain
sebagainya. Untuk membuat perangkat-perangkat eletronik
tersebut komponen-komponen elektronik dirangkai menjadi satu
sehingga dapat berfungsi sesuai dengan kegunaannya.
Dari berbagai komponen elektronik yang digunakan,
operational amplifier merupakan salah satu dari komponen yang
sering dijumpai pada perangkat elektronik yang digunakan seharihari sehingga diperlukannya pengetahuan dan pembelajaran
mengenai kegunaan dari operational amplifier untuk merancang
serta mengaplikasikan hasil pembelajaran menjadi perangkat
elektronik yang berfungsi, namun terkadang teori yang didapat
serta simulasi yang telah dilaksanakan tidak sesuai dengan
pengaplikasiannya.
Dalam penelitian ini dilakukan perancangan modul praktikum
operational amplifier guna meningkatkan pemahaman menganai
aplikasi operational amplifier. Dikarenakan proses pembelajaran
yang aplikatif lebih bersifat efektif bila dibandingkan dengan
pembelajaran secara teoritis.
1.2 Rumusan Masalah
Adapun rumusan masalah dalam pengerjaan tugas akhir ini
adalah sebagai berikut :
1. Bagaimana merancang bangun modul praktikum operational
amplifier dengan fungsi rangkaian penguat inverting,
rangkaian penguat non-inverting, rangkaian penguat
integrator, rangkaian penguat diferentiator, rangkaian
penjumlah dan rangkaian pengurang?
2. Bagaimana proses membuat sistem perekam data tegangan
pada modul praktikum operational amplifier?
1
2
1.3 Batasan Masalah
Pada tugas akhir ini , ada beberapa batasan yang digunakan
antara lain:
1. Merancang sistem yang berfungsi sebagai media
pembelajaran operational amplifier.
2. Membuat display yang menampilkan variabel yang diukur.
3. Membuat desain hardware modul operational amplifier.
1.4 Tujuan Penelitian
Adapun tujuan dari pengerjaan tugas akhir ini adalah sebagai
berikut :
1. Merancang bangun modul praktikum operational amplifier.
2. Membuat sistem perekam data tegangan yang dihasilkan pada
modul praktikum operational amplifier.
1.5 Sistematika Laporan
Sistematika laporan yang digunakan dalam penyusunan
laporan tugas akhir ini adalah sebagai berikut :
BAB I Pendahuluan
Bab ini berisi latar belakang, permasalahan, batasan masalah,
tujuan dan sistematika laporan. .
BAB II Teori Penunjang
Bab ini berisi teori-teori dan alat yang digunakan dalam
rancang bangun modul praktikum orational amplifier.
BAB III Perancangan dan Pembuatan Alat
Bab ini berisi tentang langkah – langkah dalam pengerjaan
rancang bangun modul praktikum operational Amplifier.
BAB IV Analisis Data
Bab ini berisi tentang hasil dan pembahasan dari rancang
bangun modul praktikum operational amplifier.
3
BAB V Penutup
Bab ini berisi kesimpulan yang berasal dari hasil analisis dan
pengambilan data yang ada serta saran penunjang untuk
pengembangan penelitian kedepannya.
4
(Halaman Ini Memang Dikosongkan)
BAB II
TEORI PENUNJANG
Pada bab ini menjelaskan menegenai teori yang akan
dijadikan referensi dalam melaksanakan penelitian tugas akhir ini.
Referensi yang didapat ataupun yang disajikan berasal dari jurnal
ilmiah, manual book dan dari website atau situs yang mendukung
materi pada penelitian tugas akhir ini.
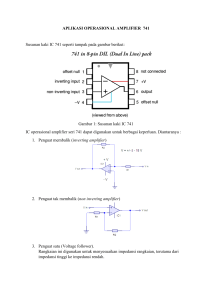
2.1. Oprational Amplifier
Operational Amplifier atau lebih dikenal dengan (op-amp)
merupakan ic yang terbentuk dari kumpulan transistor-transistor,
secara umum menggambarkan tentang sebuah rangkaian penguat
yang membentuk dasar dari rangkaian rangkaian penguat, buffer,
penggerak-penggerak saluran, penguat instrumentasi, komparator
atau pembanding, osilator, dan berbagai rangkaian analog lainnya.
Op-amp memiliki dua buah terminal masukan yaitu masukan
pembalik (-) dan masukan non-pembalik (+), pada umumnya opamp memiliki keluaran tunggal akan tetapi bebarapa jenis op-amp
memiliki dua buah terminal keluaran yang biasa digunakan pada
rangkaian-rangkaian frekuensi radio. Op-amp merupakan sebuah
rangkaian penguat arus searah dengan gain tinggi besarnya gain
(pada umumnya lebih besar dari 10000 atau lenih besar dari 100
dB),
Gambar 2.1 Simbol Operational Amplifier
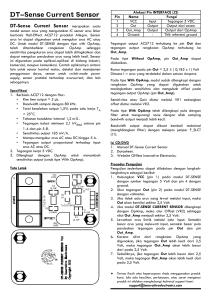
Opamp yang terdiri dari transistor memiliki karakteristik
transistor yaitu saturation, breakdown, cut-off, dan active region.
5
6
Gambar 2.2 Circuit Diagram operational amplifier LM741
Gambar 2.3 Kurva Daerah Aktif Transistor
a. Saturation
Saturation merupakan daerah dimana saat kedua penghubung
kolektor-basis dan emitter-basis mengalirkan arus (forward bias)
dengan tegangan Vce yang mendekati 0 volt, pada penggunaan
transistor digunakan sebagai switch saat memasuki saturation
region berarti switch menyala.
b. Breakdown
Breadown merupakan kondisi saat input tegangan melebihi 40 volt,
dan arus Ic meningkat sehingga dioda kolektor akan rusak.
7
c. Cut-off
Cut-off merupakan kondisi saat arus kolektor dibawah garis arus
emitor (Ie=0) atau Ic = 0, transistor dikatakan cutoff saat
penghubung kolektor - basis dan emitter - basis tidak mengalirkan
arus, saat transistor digunakan sebagai switch saat memasuki cutoff
region berarti switch tidak menyala.
d. Active Region
Active region merupakan kondisi saat penghubung emitterbasis mengalirkan arus dan penghubung kolektor basis tidak
mengalirkan arus.
Opamp memiliki beberapa rangkaian dasar yaitu inverting
amplifier, non-inveerting amplifier, differentiator amplifier, dan
integrator amplifier. Adapun penjelasan rangkaian-rangkaian dasar
op-amp :
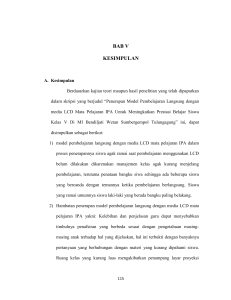
a. Inverting Amplifier
Pada rangkaian ini sinyal yang masuk kedalam op-amp akan diinverting (pembalik) dimana sinyal keluaran akan memiliki fasa
yang berkebalikan dengan fasa sinyal masuk kedalam op-amp.
sedangakan tegangan yang dikeluarkan sama dengan suplai
negative karena gain op-amp tak berhingga.
𝑅𝑖𝑛
𝐴(𝑔𝑎𝑖𝑛) =
𝑅𝑓 + 𝑅𝑖𝑛
𝑅𝑖𝑛
𝑉𝑜𝑢𝑡 = − (
) 𝑥 𝑉𝑖𝑛
𝑅𝑓 + 𝑅𝑖𝑛
8
Gambar 2.4 Rangkaian Inverting Amplifier
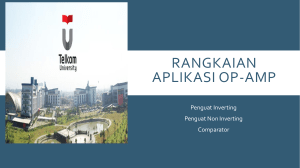
b. Non-inverting amplifier
Pada rangkaian ini sinyal yang masuk kedalam op-amp akan
dikuatkan tetapi memiliki nilai fasa sinyal keluaran yang sama
dengan fasa sinyal masuk kedalam op-amp.
𝑅𝑖𝑛
)
𝐴(𝑔𝑎𝑖𝑛) = 1 + (
𝑅𝑓 + 𝑅𝑖𝑛
𝑉𝑜𝑢𝑡 = (1 + (
𝑅𝑖𝑛
))𝑥 𝑉𝑖𝑛
𝑅𝑓 + 𝑅𝑖𝑛
Gambar 2.5 Rangkaian Non-Inverting Amplifier
c. Differntiator amplifier
Pada rangkaian diferentiator sinyal masukan akan melalui
kapasitor terlebih dahulu maka terdapat aliran arus yang menuju
titik penjumlah op-amp dan tegangan keluaran tidak sama dengan
nol hanya terjadi saat tegangan masukan berubah.
9
𝑉𝑜𝑢𝑡(𝑡) = −𝑅𝑓𝐶
𝑑𝑉𝑖𝑛
𝑑𝑡
Gambar 2.6 Rangkaian Differentiator
d. Integrator amplifier
Pada rangkaian integrator ideal mimiliki dua prinsip kerja yaitu
Tegangan keluaran penguat hanya akan mengambil suatu nilai
tertentu yang diperlukan untuk menjaga agar terminal masukan
pembalik berada pada potensial yang sama dengan potensial
terminal masukan non pembalik. Hal ini mencegah terjadinya
akumulasi atau penumpukan muatan pada terminal masukan
pembalik op-amp.
Adapun prinsip kedua mengenai hubungan antara tegangan
pada sebuah kapasitor dan muatan pada pelat-pelat kapasitor,
tegangan pada kapasitor akan berbanding lurus terhadap integral
waktu dari arus pengisian kapasitor.
Arus masukan akan mengalir menuju terminal masukan
pembalik op-amp, karena op-amp tidak menarik arus pada terminal
masukan pembaliknya maka semua arus yang mengalir melalui
resistor harus mengalir terlebih dahulu melalui kapasitor.
𝑉𝑜(𝑡) =
𝑡
−1
∫ 𝑉𝑖𝑛(𝑡)𝑑𝑡
𝑅𝑖𝑛 𝐶 0
10
Gambar 2.7 Rangkaian Integrator Amplifier
e. Rangkaian penjumlah
Penguat dengan diberikan input lebih dari satu untuk
menghasikan sinyal ouput yang linier sesuai dengan nilai
penjumlahan sinyal input dan faktor penguatan Pada operasi
adder/penjumlah sinyal secara inverting, sinyal input (V1, V2, V3)
diberikan ke line input penguat inverting berturut-turut melalui R1,
R2, R3. Besarnya penjumlahan sinyal input tersebut bernilai
negatif karena penguat operasional dioperasikan pada mode
membalik (inverting).
𝑅𝑓
𝑅𝑓
𝑅𝑓
) + (𝑉2 𝑥
) + (𝑉3 𝑥
))
𝑉𝑜𝑢𝑡 = −((𝑉1 𝑥
𝑅2
𝑅3
𝑅1
Gambar 2.8 Rangkaian Penjumlah Inverting
Rangkaian penjumlah non-inverting memiliki penguatan
tegangan yang tidak melibatkan nilai resistansi input yang
digunakan. Oleh karena itu dalam rangkaian penjumlah noninverting nilai resistor input (R1, R2, R3) sebaiknya bernilai sama
persis, hal ini bertujuan untuk mendapatkan kestabilan dan akurasi
penjumlahan sinyal yang diberikan ke rangkaian. Pada rangkaian
11
penjumlah non-inverting diatas sinyal input (V1, V2, V3)
diberikan ke jalur input melalui resitor input masing-masing (R1,
R2, R3). Besarnya penguatan tegangan (Av) pada rangkaian
penguat penjumlah non-inverting diatas diatur oleh Resistor
feedback (Rf) dan resistor inverting (Ri),
𝑉𝑜𝑢𝑡 =
𝑅1
𝑅2
𝑅3
𝑅𝑖 + 𝑅𝑓
(
+
+
)
𝑅1 + 𝑅2 + 𝑅3 𝑅1 + 𝑅2 + 𝑅3 𝑅1 + 𝑅2 + 𝑅3
𝑅𝑖
Gambar 2.9. Rangkaian Penjumlah Non-Inverting
f. Rangkaian Diferential
Penguat dengan masukan non inverting berupa ground dan
tegangan, yang akan menghasilkan output tegangan yang bernilai
negatif.
𝑅3
𝑅4
𝑅1 + 𝑅3
)(
)
𝑉𝑜𝑢𝑡 = −𝑉1 ( ) + 𝑉2(
𝑅1
𝑅2 + 𝑅4
𝑅1
Gambar 2.10 Rangkaian Diferential
12
g. Rangkaian penyaring aktif
Op-amp sebagai penyaring aktif memiliki dua jenis yaitu Low
Pass Filter (LPF) dan High Pass Filter (HPF), Low Pass Filter
aktif adalah filter yang akan meloloskan frekuensi yang berada
dibawah frekuensi cut off (fc) dan meredam frekuensi diatas fc.
rangkaian filter yang menggunakan penguat operasional (OpAmp) rangkaian terpadu (IC) dimana rangkaian filter aktif low pass
ini akan meloloskan sinyal input dengan frekuensi dibawah
frekuensi cut off rangkaian dan akan melemahkan sinyal input
dengan frekuensi diatas frekuensi cut-off rangkaian filter aktif low
pass tersebut.
Berikut rumus gain low pass filter :
1
𝑓𝑐 = 2𝜋𝑅𝐶
𝐴𝑓 = (1 +
𝑅2
)
𝑅1
dengan penguatan sebesar :
𝐴𝑣 =
𝑉𝑜𝑢𝑡
=
𝑉𝑖𝑛
𝐴𝑓
𝑓
√1 + ( )2
𝑓𝑐
Gambar 2.11 Rangkaian Low Pass Filter aktif
Filter aktif high pass atau sering disebut dengan Active High
Pass Filter (Active HPF) atau juga disebut dengan filter aktif lolos
13
atas adalah rangkaian filter yang akan melewatkan sinyal input
dengan frekuensi diatas frekuensi cut-off rangkaian dan akan
melemahkan sinyal input dengan frekuensi dibawah frekuensi cutoff rangkaian dan ditambahkan rangkaian penguat tegangan
menggunakan operasional amplifier (Op-Amp).
Berikut rumus gain high pass filter :
𝑓
𝐴𝑓( )
𝑉𝑜𝑢𝑡
𝑓𝑐
𝐴𝑣 =
=
𝑉𝑖𝑛
𝑓
√1 + ( )2
𝑓𝑐
Gambar 2.12 Rangkaian High Pass Filter aktif
h. Rangkaian Buffer
Rangkaian buffer adalah rangkaian yang menghasilkan
tegangan output sama dengan tegangan inputnya. Dalam hal ini
seperti rangkaian common colektor yaitu berpenguatan = 1. Fungsi
dari rangkaian buffer pada peralatan elektronika adalah sebagai
penyangga, dimana prinsip dasarnya adalah penguat arus tanpa
terjadi penguatan tegangan. Dengan menghubungkan jalur input
inverting ke jalur output operasional amplifier (op-amp) maka
rangkaian buffer pada gambar diatas akan memberikan
kemampuan mengalirkan arus secara maksimal sesuai kemampuan
maksimal operasional amplifier (op-amp) mengalirkan arus output
14
Gambar 2.13 Rangkaian Buffer
2.2. Teori Pembagi Tegangan
Pengukuran tegangan pada rangkaian menggunkan rangkaian
pembagai tegangan dengan menggunakan Rumus :
𝑅2
𝑥 𝑉𝑖𝑛
(𝑅1 + 𝑅2)
Mikrokontroler memiliki batasan pembacaan 0-5 Volt,
dengan rangkaian pembagi tegangan maka besar Vin yang akan
dibaca oleh diubah menjadi tegangan 0-5 Volt.
𝑉𝑜 =
Gambar 2.14 Rangkaian Pembagi Tegangan
2.3. LCD 16x2
LCD (Liquid Crystal Display) terbagi menjadi dua yaitu
alphanumeric dan grafik, LCD 16x2 merupakan penampil
alphanumeric yang berfungsi untuk menampilkan data yang telah
diolah mikrokontroler menjadi huruf dan angka. Data yang
ditampilkan pada LCD 16x2 dapat berupa 4 bit dan 8 bit, perbedaan
4 bit dengan 8 bit terletak pada pengiriman data dari
mikrokontroler ke LCD dimana 8 bit melakukan pengiriman data
15
sekali sedangkan 4 bit dua kali. LCD 16x2 memiliki 16 pin yang
berupa VSS = GND VDD, Vo, RS, R/W, E, DB0, DB1, DB2, DB3,
DB4, DB5, DB6, DB7, A, dan K.
Gambar 2.15 LCD 16x2
2.4. SD Card Modul
Micro SD Card Modul SPI Antarmuka Mini card reader TF
Modul (MicroSD Card Adapter) adalah modul pembaca kartu
Micro SD, melalui sistem file dan SPI antarmuka driver, MCU
untuk melengkapi sistem file untuk membaca dan menulis kartu
MicroSD. Fitur modul adalah sebagai berikut:
1. Mendukung kartu Micro SD, kartu Micro SDHC (kartu
kecepatan tinggi)
2. tingkat konversi papan sirkuit yang antarmuka level untuk 5V
atau 3.3V
3. power supply adalah 4.5V ~ 5.5V, regulator tegangan 3.3V
papan sirkuit
4. adalah komunikasi antarmuka SPI antarmuka standar
5, empat (4) M2 lubang sekrup posisi untuk kemudahan instalasi
16
Gambar 2.16 Modul SD Card
2.5. Mikrokontroler ATMega 128
Mikrokontroler Atmega128 merupakan generasi AVR ( Alf
and Vegard’s Risk processor). Mikrokontroler AVR memiliki
arsitektur RISC (Reduced Instruction Set Computing) 8 bit, dimana
semua instruksi dalam kode 16-bit (16-bit word) dan sebagian
besar instruksi dieksekusi dalam 1 (satu) siklus clock. AVR
menjalankan sebuah instruksi komponen eksternal dapat dikurangi.
Mikrokontroler AVR didesain menggunakan arsitektur Harvard, di
mana ruang dan jalur bus bagi memori program dipisahkan dengan
memori data. Memori program diakses dengan single-level
pipelining, di mana ketika sebuah instruksi dijalankan, instruksinya
akan di-prefetch dari memori program. Fitur-fitur yang dimiliki
oleh mikrokontroler ATMega128 antara lain:
17
Gambar 2.17 Konfigutasi ATMega 128A[2]
2.6. Analog Digital Converter (ADC)
Mikrokontroler untuk membaca signal analog membutuhkan
ADC yang akan mengubah sinyal analog menjadi digital sehingga
dapat terbaca oleh mikrokontroler, pengubahaan sinyal analog
menjadi digital menggunakan sampling yang akan diubah menjadi
bilangan biner. ADC memiliki tingkat ketelitian yang bergantung
pada jumlah bit sampling. Semakin besar bit ADC maka semakin
teliti proses sampling sinyal analog.
Syarat Nyquist waktu pengambilan sampling data harus 2 kali
lebih cepat dari frekuensi sinyal analog yang dibaca sehingga
sinyal diskrit yang diproses dapat mewakili sifat aslinya, apabila
syarat tersebut tidak terpenuhi maka pembacaan sampling tidak
sesuai atau kurang akurat.
𝑓𝑠 > 2𝑓𝑖𝑛 𝑚𝑎𝑥
18
Gambar 2.18 Analog Digital Convertion
2.7. Karakteristik Alat Ukur
Setiap Instrumen ukur mempunyai karakteristik yang melekat
padanya. Terdapat dua karakteristik instrument ukur yang
digunakan, yaitu karakteristik statik dan karakteristik dinamik.
2.7.1 Karakteristik Statik Alat ukur
Karakteristik statis instrumen merupakan hubungan antara
output sebuah elemen (instrumen) dengan inputnya ketika inputnya
konstan maupun berubah perlahan. Karakteristik statis tidak
bergantung pada waktu. Yang termasuk dalam karakteristik statis
adalah range, linieritas, sensitivitas, resolusi, akurasi, presisi,
toleransi.
a. Range
Range adalah nilai minimum hingga maksimum suatu
elemen. Range terdiri dari range input dan range output.
b. Span
Span merupakan selisih nilai maksimum dengan nilai
minimum. Span terdiri dari span input dan span output.
c. Linieritas
Pengukuran dapat dikatakan ideal saat hubungan antara input
pengukuran (nilai sesungguhnya) dengan output pengukuran (nilai
yang ditunjukkan oleh alat) berbanding lurus. Linieritas
merupakan hubungan nilai input dan output alat ukur ketika
terletak paada garis lurus. Garis lurus ideal merupakan garis yang
menghubungkan titik minimum input/output dengan titik
maksimum input/output. Berikut merupakan persamaannya:
Oideal = KI + a
(2.9)
19
Dengan K adalah kemiringan garis, dapat diketahui melalui
persamaan:
K=
Omax -Omin
(2.10)
Imax -Imin
Dan a adalah pembuat nol (zero bias), dapat dihitung dengan
persamaan:
a = Omin – Kimin
(2.11)
Berikut merupakan grafik karakteristik statis linier suatu
instrume:
Gambar 2.19 Karakteristik Output Instrumen Linier[12]
d. Non – Linieritas
Dalam beberapa keadaan, bahwa dari persamaan linieritas
muncul garis yang tidak lurus yang biasa disebut non-linier atau
tidak linier. Didalam fungsi garis yang tidak linier ini menunjukkan
perbedaan antara hasil pembacaan actual / nyata dengan garis lurus
idealnya. Dengan persamaan sebagai berikut :
𝑁(𝐼) = 𝑂(𝐼) − (𝐾𝐼 + 𝑎)
(2.12)
𝑂(𝐼) = 𝐾𝐼 + 𝑎 + 𝑁(𝐼)
(2.13)
Sedangkan untuk persamaan dalam bentuk prosentase dari
defleksi skala penuh, sebagai berikut:
Prosentase maksimum Nonlinieritas dari defleksi skala
penuh = =
̂
𝑁
𝑥100%
𝑂𝑚𝑎𝑘𝑠 − 𝑂𝑚𝑖𝑛
(2.14)
20
Gambar 2.20 Grafik non-linieritas [5]
e. Sensitivitas
Sensitivitas diartikan seberapa peka sebuah sensor terhadap
besaran yang diukur. Sensitivitas juga bisa diartikan sebagai
perubahan output alat dibandingkan perubahan input dalam satu
satuan. Sebagai contoh timbangan dengan kapasitas 700g
mempunyai sensitivitas 1 mg. Ini berarti timbangan dapat
digunakan untuk mengukur hingga 700g dengan perubahan
terkecil yang dapat terbaca sebesar 1 mg.
Sensitivitas =
∆O
∆I
(2.15)
f.
Resolusi
Resolusi merupakan perubahan terbesar dari input yang dapat
terjadi tanpa adaya perubahan pada output. Suatu alat ukur dapat
dikatakan mempunyai resolusi tinggi saat mampu mengukur
dengan ketelitian yang lebih kecil. Misalkan, alat ukut yang
mampu mengukur perubahan dalam mV mempunyai resolusi yang
lebih tinggi dibanding alat ukur yang mengukur perubahan dalam
skala volt.
g. Akurasi
Akurasi merupakan ketepatan alat ukur untuk memberikan
nilai pengukuran yang mendekati nilai sebenarnya. Karena pada
eksperimen nilai sebenarnya tidak pernah diketahui oleh sebab itu
diganti dengan suatu nilai standar yang diakui secara konvensional.
Contohnya termometer dengan skala 0°-150°C mempunyai akurasi
1°C, ini berarti jika termometer menunjukkan nilai 80°C maka nilai
sebenarnya adalah 79°C-81°C.
21
h. Presisi
Presisi adalah kemampuan instrument/elemen untuk
menampilkan nilai yang sama pada pengukuran berulang singkat.
(a)
(b)
(c)
Gambar 2.21 Penjelasan Akurasi dan Presisi (a) akurasi rendah,
presisi rendah (b) akurasi rendah, presisi tinggi (c) akurasi tinggi
presisi tinggi
2.8 Analisis Ketidakpastian
Ketidakpastian adalah nilai ukur sebaran kelayakan yang
dapat dihubungkan dengan nilai terukurnya. Dimana di dalam nilai
sebaran tersebut terdapat nilai rentang yang menunjukkan nilai
sebenarnya.
a. Klasifikasi ketidakpastian, antara lain :
Tipe A : nilai ketidakpastian yang dilihat dari analisis
pengukuran statistik (ISO GUM B 2.15; VIM 3.5 dalam KAN
DP.01.23).
Di dalam tipe ini dilakukan pengukuran hingga n kali, dimana
dari pengukuran tersebut akan mendapatkan nilai rata-rata,
standar deviasi, dan data keterulangan. Dimana rumus umum
ketidakpastian tipe A sebagai berikut :
-
𝜎
𝑼𝒂𝟏 = 𝑛 (Ketidakpastian hasil pengukuran)
√
Dimana :
σ=Standart deviasi koreksi
n = Jumlah data
√∑(𝑦𝑖 −𝑦̅)2
𝑛−1
𝑆𝑆𝑅
√
(𝐾𝑒𝑡𝑖𝑑𝑎𝑘𝑝𝑎𝑠𝑡𝑖𝑎𝑛
𝑛−2
σ= 𝜎 =
𝑼𝒂𝟐 =
(2.16)
(2.17)
𝑟𝑒𝑔𝑟𝑒𝑠𝑖)
(2.18)
22
Dimana :
SSR (Sum Square Residual) = ∑SR (Square Residual)
SR = R2 (Residu)
Yi (Nilai koreksi) = ti – xi
(2.19)
𝑌𝑟𝑒𝑔 = 𝑎 + (𝑏 𝑥 𝑡𝑖)
(2.20)
(2.21)
𝑎 = 𝑦̅𝑖 + (𝑏 𝑥 𝑡̅𝑖 )
𝑛 .∑ 𝑡𝑖 𝑦𝑖 − ∑ 𝑦 . ∑ 𝑡𝑖
𝑏=
;
(2.22)
2
2
𝑛 . ∑ 𝑡𝑖 − (∑ 𝑡𝑖 )
Dimana :
ti = Pembacaan standar
xi = Pembacaan alat
yi = Nilai koreksi
Tipe B : nilai ketidakpastian yang tidak dilihat dari analisis
pengukuran statistik (ISO GUM B 2.15; VIM 3.5 dalam
KAN DP.01.23). Berikut merupakan rumus umum dari
ketidakpastian tipe B :
1
𝑥 𝑅𝑒𝑠𝑜𝑙𝑢𝑠𝑖
UB1 = 2
𝑎
𝑘
(2.23)
√3
UB2 =
(2.24)
Dimana :
UB1 =
Nilai ketidakpastian resolusi
UB2 =
Nilai ketidakpastian dari alat standar/kalibrator
-
Ketidakpastian Baku Gabungan (Kombinasi)
Ketidakpastian baku gabungan disimbolkan dengan Uc,
dimana nilai ketidakpastian yang digunakan untuk mewakili
nilai estimasi standar deviasi dari hasil pengukuran. Nilai
ketidakpastian baku gabungan didapat dari menggabungkan
nilai-nilai ketidakpastian baku dari setiap taksiran masukan
(hukum propagasi ketidakpastian) (ISO GUM B 2.15; VIM
3.5 dalam KAN DP.01.23).
Berikut merupakan rumus umum ketidakpastian baku
gabungan :
2
2
2
Uc = U AI U A2 U B1 U B 2
Dimana :
2
(2.25)
23
Uc = Nilai ketidakpastian kombinasi
UA1 = Nilai ketidakpastian hasil pengukuran
UA2 = Nilai ketidakpastian regresi
UB1 = Nilai ketidakpastian resolusi
UB2 = Nilai ketidakpastian kalibrator
- Derajat Kebebasan Efektif
Derajat kebebasan efektif ini berfungsi sebagai pemilihan faktor
pengali untuk distribusi Student’s T serta sebagai penunjuk
perkiraan kehandalan ketidakpastian (ISO GUM B 2.15; VIM 3.5
dalam KAN DP.01.23). Derajat kebebasan disimbolkan dengan v,
dengan rumus sebagai berikut :
V = n-1
(2.26)
Dimana :
n = Jumlah data
Sedangkan untuk derajat kebebasan efektif merupakan estimasi
dari derajat kebebasan ketidakpastian baku gabungan yang
dirumuskan sebagai berikut (rumus Welch-Setterthwaite):
𝑉𝑒𝑓𝑓 =
(𝑈𝑐 )4
(𝑈𝑖 )4⁄
∑
𝑉
(2.27)
𝑖
Dimana :
Veff = Derajat kebebasan efektif dari ketidakpastian kombinasi
vi = Derajat kebebasan dari komponen ketidakpastian ke-i
Ui = Hasil ketidakpastian tipe A dan B
Setelah ditentukan nilai derajat kebebasan effektif, maka dapat
dilanjutkan dengan menghitung nilai faktor cakupan sesuai dengan
tingkat kepercayaan yang diinginkan, dimana faktor cakupan (k)
didapat dari tabel T-students.
- Ketidakpastian Diperluas, Uexp
Ketidakpastian diperluas merupakan akhir nilai ketidakpastian
dengan tingkat kepercayaan. Tingkat kepercayaan tingkat
keyakinan mengenai daerah nilai sebenarnya pada suatu
pengukuran (LPF, 2013).
Uexp = k x Uc
(2.28)
24
Dimana :
k = Faktor cakupan
Uc = Nilai ketidakpastian kombinasi[12]
BAB III
METODOLOGI PENELITIAN
3.1 Perancangan Sistem
Pada bab ini akan dijabarkan langkah-langkah alur penelitian
perancangan modul praktikum operational amplifier. Berikut
diagram alir penelitian tugas akhir :
MULAI
RUMUSAN MASALAH
STUDI LITERATUR
PERANCANGAN HARDWARE
PERANCANGAN SOFTWARE
UJI COBA PEMBACAN
TEGANGAN (0 - 15 Volt)
HASIL UJI
PEMBACAAN SENSOR TIDAK
TEGANGAN
SESUAI DENGAN ALAT
STANDAR?
YA
PENGAMBILAN DATA
ANALISIS DATA dan
KESIMPULAN
PENYUSUNAN dan
PENYELESAIAN LAPORAN
SELESAI
Gambar 3.1 Diagram Alir Penelitian Tugas Akhir
Untuk mencapai tujuan penyelesaian tugas akhir yang
direncanakan, maka perlu dilakukan suatu langkah-langkah dalam
menyelesaikan tugas akhir ini. Adapun langkah-langkahnya adalah
sebagai berikut :
25
26
Studi literatur yaitu mengenai operational amplifier.
Studi kebutuhan yaitu menunjang pemilihan dan pengerjaan
perancangan hardware dan software.
Perancangan hardware pada modul praktikum operational
amplifier.
Perancangan software pada modul operational amplifier
menggunakan mikrokontroler Atmega 128 dengan
menggunakan bahasa C.
Pengujian hardware dan software pada modul praktikum
operational amplifier untuk pengambilan data hasil
percobaan.
3.1.1 Perancangan Modul Praktikum Operational Amplifier
Perancangan sistem modul praktikum bertujuan untuk mengatur
penampilan dan penyimpanan data dari hasil keluatan modul
praktikum. Alur perancangan sistem charging control dapat dilihat
pada diagram alir pada gambar 3.2 :
START
Rangkaian
Pembagi
Tegangan
ATMEGA 128
LCD 16x2
&
Micro SD
END
Gambar 3.2 Diagram Alir Modul Praktikum Oprational
Amplifier
27
3.2 Perancangan Hardware
Perancangan hardware dilakukan untuk membuat rangkaian
komponen yang baik. Sistem ini dirancang dan digunakan pada
modul praktikum operational amplifier.
3.2.1 Perancangan Sensor Tegangan
Pada perancangan alat ini menggunakan rangkaian
pembagi tegangan sebagai sensor tegangan. Pada rangkaian
pembagi tegangan terdapat dua buah resistor yang berbeda
nilainya, kedua resistor ini digunakan untuk membandingkan
tegangan yang mengalir di kedua resistor.
𝑅2
𝑉𝑜𝑢𝑡 = 𝑅 +𝑅
× 𝑉𝑖𝑛
(3.1)
2
1
Rangkaian pembagi tegangan berfungsi sebagai konversi
tegangan. Tegangan output dari generator DC adalah 0 sampai 36
Volt, sedangkan tegangan yang diinputkan pada mikrokontroller
adalah 0 sampai 5 Volt. Oleh karena itu masuk ke mikrokontroller
sesuai dengan kriteria pada komponen mikrokontroler.
𝑉𝑜𝑢𝑡 = 𝑅
𝑅2
2 +𝑅1
× 𝑉𝑖𝑛
(3.2)
Misalkan 𝑅2 = 1 𝐾Ω
𝑉𝑜𝑢𝑡 = 5 Volt (V mikrokontroler)
𝑉𝑜𝑢𝑡 = 15 Volt (𝑉𝑜𝑢𝑡 dari generator dan charger controller)
10
× 15
5=
10 + 𝑅1
15 = 5𝑅1 + 5
10 = 5𝑅1
𝑅1 = 20 𝐾Ω
Sehingga, dalam rangkaian voltage divider sebagai sensor
tegangan digunakan dua resistor yaitu resistor1 10 𝐾Ω dan
resistor2 20 𝐾Ω, maka rangkaian untuk sensor tegangan adalah
rangkaian voltage devider, rangkaiannya ditunjukkan pada gambar
3.3.
28
Gambar 3.3 Skematik Modul Oprational Amplifier
Gambar 3.4 Rangkaian Pembagi Tegangan
Gambar 3.5 Sensor Tegangan dan Rangkaian LCD
Output sensor tegangan akan dibaca oleh ADC mikrokontroler
dikarenakan output modul op-amp berupa sinyal sinusoida, sinyal
kotak, sinyal segitga, sinyal ramp, dan berbagai sinyal lainya yang
dapat dihasilkan function generator. Maka proses sampling dan
29
konversi sinyal harus dilakukan 2 kali lebih cepat dari sinyal yang
dibaca, dengan frekuensi sinyal yang masuk sebesar 50 Hz dengan
menggunakana rumus :
1
𝑓=
𝑇
Maka didapat besar periode 0.02 sekon, dikarenakan waktu
sampling harus dua kali lebih cepat, maka waktu pengambilan
sampling sebesar 200 milisekon .
Gambar 3.6 Sampling Sinyal Analog
Data yang didapat dari sampling berupa biner 10-bit atau (01023) data tersebut lalu dikonversi menjadi tegangan menggunakan
rumus :
𝑑𝑎𝑡𝑎
𝑉𝑎𝑑𝑐 = (
𝑥 5) 𝑥3
1023
Rumus dapat berubah sesuai dengan rangkaian sensor yang
digunakan karena pada rangkaian pembagi tegangan yang
digunakan maksimum pembacaan 15 volt maka keluaran rangkaian
pembagi tegangan dikalikan 3.
Modul praktikum op-amp dapat dirangkai menjadi beberapa
jenis rangkaian op-amp diantaranya op-amp inverting, noninverting, differentiator, integrator, summing, dan diferential. Pada
modul op-amp telah disediakan beberapa resistor dan kapasitor
pada bagian depan modul sehingga pada saat melakukan percobaan
30
praktikan hanya menghubungkan resistor dengan op-amp sesuai
dengan yang akan diuji cobakan.
Output opamp
Input opamp
Lubang Komponen
Gambar 3.7 Modul Praktikum Op-amp Tampak Atas
Gambar 3.8 Modul Praktikum Op-amp Tampak Depan
3.2.2
Perancangan ATmega128
Dalam perancangan sistem monitoring ini diperlukan suatu
rangkaian ATmega128 yang berfungsi sebagai gerbang
31
pengidentifikasi data yang masuk maupun yang keluar melewati
ATMega128.
Gambar 3.9 Skematik Minimum System ATmega128
Sebagai pemroses sinyal analog ke digital yang ada di dalam
ATmega128 tersebut yang akan digunakan dalam monitoring arus,
dan voltase pada keluaran generator dan charger controller. Sistem
monitoring tersebut akan menggunakan sensor sebagai pembaca
sinyal analog / digital yang akan diproses oleh ATmega32 sehingga
dapat dibaca lcd 16 x 2 sebagai penampil data.
Untuk penggunaannya minimum sistem ini pada PORT C
akan digunakan sebagai keluaran LCD. Kemudian PORT A0 dan
A1 (Analog 0 dan 1) sebagai inputan dari sensor Voltage Divider
yang lalu data akan dikirim menuju lcd sebagai penampil data
Sensor.
3.3 Perancangan Software
Pada perancangan software, sistem menggunakan beberapa
software untuk menjalankan program, yaitu Sketch ATMega128
sebagai pemrosesan sinyal.
3.3.1 Sketch ATmega128
32
Didalam Sketch ATMega128 inilah pengguna melakukan
proses pengkodingan dengan berbagai macam perintah dan
keinginan, sesuai ketentuan. Dari koding yang telah dilakukan
perlu untuk diupload menuju perangkat keras dari ATMega128
tersebut sebagai alat yang digunakan sesuai keinginan dari
pengguna melalu koding dari ATMega128. Koding yang
digunakan dalam ATMega128 tersebut menggunakan bahasa C
sebagai perintah atau ketentuan yang dibuat dalam koding. Pada
Gambar 3.6 merupakan flowchart dari perancangan sensor
tegangan pada ATMega128.
START
Inisialisasi Port
ADC
(Port A0)
Data Pembacaan
Tegangan
Masuk
Mulai Proses Konversi
DATA SAMPLING
<= 5 ?
TIDAK
YA
Data ADC
END
Gambar 3.10 Flowchart Perancangan Sensor Tegangan
33
Pada flowchart perancangan sensor tegangan, dilakukan
penginisialisasian port adc yang akan digunakan, untuk sensor
tegangan menggunakan port A0 dan A1.
3.4 Langkah-langkah
Penggunaan
Modul
Praktikum
Operational Amplifier
Berikur merupakan flowchart langkah-langkah penggunaan
modul operational amplifier :
START
Mempersiapkan
Peralatan
Praktikum
Penetapan Rangkaian Opamp
yang akan dirangkai dan
menghitung output Opamp
secara teori
Penyusunan rangkaian
Opamp yang ditetapkan
TIDAK
Apakah Output Opamp
Sesuai atau mendekati
hasil perhitungan?
YA
Modul Opamp
Berhasil
Dirangkai
END
Gambar 3.11 Flowchart Penggunaan Alat
Peralatan yang dibutuhkan untuk melakukan percobaan
dipersiapkan terlebih dahulu seperti function generator, osiloskop,
34
dan modul praktikum operational amplifier, setelah itu dilakukan
peenetapan rangkaian operational amplifier yang akan dirangkai
lalu dilakukan perhitungan gain rangkaian. Setelah perhitungan
selesai maka ramgkaian dirangkai pada modul praktikum
operational amplifier, output modul dihubungkan dengan
osiloskop, sedangkan input modul dihubungkan dengan output
function generator. Setelah itu output modul yang terlihat pada
osiloskop dibandingkan dengan hasil perhitungan yang telah
dihitung, apabila output sesuai atau mendekati maka rangkaian
modul telah sesuai apabila output modul tidak sesuai maka
rangkaian modul harus diperbaiki terlebih dahulu.
3.4.1 Rangkaian Opamp Inverting Pada Modul
Pada percobaan rangkaian opamp inverting pada modul
praktikum digunakan input berupa function generator dengan
frekuensi diatur f=50 Hz yang dihubungkan dengan input inverting
(-) sedangkan input non-inverting (+) diberikan pada ground,
komponen yang digunakan 2 buah resistor 1MΩ yang ditempatkan
pada input inverting opamp dan pada feedback output, lalu output
dihubungkan pada osiloskop. Sinyal yang dikeluarkan function
generator pada saat percobaan berupa sinyal sinusoida, kotak,
segitiga, ramp, dan pulse.
Gambar 3.12 Rangkaian Opamp Inverting Pada Modul
3.4.2 Rangkaian Opamp Non-Inverting Pada Modul
35
Pada percobaan rangkaian opamp Non-Inverting pada modul
praktikum digunakan input berupa function generator dengan
frekuensi diatur f=50 Hz yang dihubungkan dengan input Noninverting (+) sedangkan input inverting (-) diberikan ground,
komponen yang digunakan 2 buah resistor 1MΩ yang ditempatkan
pada input inverting opamp dan pada feedback output, lalu output
dihubungkan pada osiloskop. Sinyal yang dikeluarkan function
generator pada saat percobaan berupa sinyal sinusoida, kotak,
segitiga, ramp, dan pulse.
Gambar 3.13 Rangkaian Opamp Non-Inverting Pada Modul
3.4.3 Rangkaian Opamp Integrator Pada Modul
Pada percobaan rangkaian opamp Integrator pada modul
praktikum digunakan input berupa function generator dengan
frekuensi diatur f=50 Hz yang dihubungkan dengan input Inverting
(-) sedangkan input Non-inverting (+) diberikan ground,
komponen yang digunakan 1 buah kapasitor 300nF yang
ditempatkan pada input inverting opamp dan 1 buah resistor 1MΩ
pada feedback output, lalu output dihubungkan pada osiloskop.
Sinyal yang dikeluarkan function generator pada saat percobaan
berupa sinyal sinusoida, kotak, segitiga, ramp, dan pulse.
36
Gambar 3.14 Rangkaian Opamp Integrator Pada Modul
3.4.4 Rangkaian Opamp Differentiator Pada Modul
Pada percobaan rangkaian opamp Differeniator pada modul
praktikum digunakan input berupa function generator dengan
frekuensi diatur f=50 Hz yang dihubungkan dengan input Inverting
(-) sedangkan input Non-inverting (+) diberikan ground,
komponen yang digunakan 1 buah resistor 1MΩ yang ditempatkan
pada input inverting opamp dan 1 buah kapasitor 300nF pada
feedback output, lalu output dihubungkan pada osiloskop. Sinyal
yang dikeluarkan function generator pada saat percobaan berupa
sinyal sinusoida, kotak, segitiga, ramp, dan pulse.
Gambar 3.15 Rangkaian Opamp Differentiator Pada Modul
37
3.4.5 Rangkaian Opamp Summing Pada Modul
Pada percobaan rangkaian opamp inverting pada modul
praktikum digunakan input berupa function generator dengan
frekuensi diatur f=50 Hz yang dihubungkan dengan input inverting
(-) sedangkan input non-inverting (+) diberikan pada ground,
komponen yang digunakan 3 buah resistor 1MΩ yang ditempatkan
pada input inverting opamp dengan input function generator
berbeda dan pada feedback output, lalu output dihubungkan pada
osiloskop. Sinyal yang dikeluarkan function generator pada saat
percobaan berupa sinyal sinusoida, kotak, segitiga, ramp, dan
pulse.
Gambar 3.16 Rangkaian Opamp Summing Pada Modul
3.4.6 Rangkaian Opamp Differential Pada Modul
Pada percobaan rangkaian opamp inverting pada modul
praktikum digunakan input berupa function generator dengan
frekuensi diatur f=50 Hz yang dihubungkan dengan input inverting
(-) sedangkan input non-inverting (+) diberikan output function
generator dengan frekuensi yang sama tetapi tegangan yang
berbeda, komponen yang digunakan 2 buah resistor 1MΩ yang
ditempatkan pada input inverting opamp dan pada feedback output,
lalu output dihubungkan pada osiloskop. Sinyal yang dikeluarkan
function generator pada saat percobaan berupa sinyal sinusoida,
kotak, segitiga, ramp, dan pulse.
38
Gambar 3.17 Rangkaian Opamp Differential Pada Modul
(Halaman Ini Memang Dikosongkan)
BAB IV
ANALISIS DATA DAN PEMBAHASAN
4.1 Analisis Data
4.1.1 Penempatan Alat Ukur
Penempatan alat ukur pada output Oprational Amplifier,
sehingga dapat menampilkan tegangan output operational amplifier
pada saat melakukan percobaan.
Gambar 4.1 Penempatan alat ukur pada modul praktikum
operational amplifier
4.1.2 Pengujian Alat Pengukur Tegangan
a, Pengujian Alat
Setelah dilakukan perancangan alat, dilakukan pengujian alat.
Pengujian pembacaan arus dilakukan pada rentang 2-12 Volt
menggunakan regulator DC.
39
40
Gambar 4.2 Pengujian Sensor Tegangan
Pada setiap ampere diambil pembacaan sebanyak 10 data
dengan pembacaan naik dan pembacaan turun. Alat standar yang
digunakan adalah regulator standard dan multimeter standar.
Berikut ini data yang diperoleh dari pengujian alat, dan grafiknya
pada Gambar 4.3.
Voltase
15
10
Pembacaan
Standar
5
Rata - Rata Alat
0
2
4
6
8
10 12
Range Voltase
Gambar 4.3 Grafik Pembacaan Standar dan Pembacaan alat
Jika tipe grafik dirubah menjadi tipe scatter, maka akan
didapatkan grafik seperti Gambar 4.5.
41
Pembacaan Standar dan Pembacaan Alat
14
y = 0.9263x + 0.3793
R² = 0.9985
Pembacaan Alat
12
10
8
Pembacaan
Alat
6
4
Pembacaan
Standar
2
0
0
5
10
15
Pembacaan Standar
Gambar 4.4 Grafik pembacaan Alat dan Pembacaan Standar
b. Data Spesifikasi Alat
Berdasarkan data yang telah didapatkan dari pengujian
spesifikasi alat melalui data karakteristik statik, menghasilkan data
sebagai berikut:
Tabel 4.1 Data Karakteristik Statik Alat
No
Rentang
Tegangan
Pembacaan
Std
1
2
2.06
2
4
4.03
3
6
6.01
4
8
8
5
10
9.96
6
12
11.9
Pembacaan
Alat
Rata Rata
O -Oideal
Koreksi (y)
Non Linearitas
2.1
2.14
0.02
-0.12
0
4.08
4.016
0.000599327
0.014
-0.042400673
6.05
5.949
0.07591807
0.051
0.06891807
7.91
7.86
0.119806958
0.12
0.128806958
9.74
9.6755
0.2545
0.06798541
11.3
11.1877
0.09648541
0.267777778
0.732222222
1.77636E-15
Sehingga menghasilkan nilai:
Range
: 2 - 12
Span
: 10
Non-Linearitas : 1.379746%
42
Histerisis
: 5.736729%
Akurasi
: 97.91441%
Kesalahan
: 2.085588%
Berikut ini hasil perhitungan nilai karakteristik statik alat ukur arus
berdasarkan data pada Tabel 4.3.
Sensitivitas (dari data pengujian alat) :
sensitivitas =
𝛥𝑂
𝛥𝐼
=
9,3356
9,9
= 0,942985
Non – linieritas maksimum per unit
=
N
x 100%
Omax-Omin
Dimana :
K (sensitivitas) = 0.942985
a (zero bias) = Omin – KImin
a = 2.12– (0.942985)( 2.02)
a = 0.215169
Non-Linearitas (maksimum) = 0.128806958
sehingga :
Non-linieritas maksimum per unit
0,942985
= 11,45−2,12 𝑥 100% =1.379746%
Histerisis :
H(I) = O(I)I↑ - O(I)I↓, Ĥ = H(I)max sehingga :
Ĥ
% maksimum histerisis= Omax-Omin x 100%
1.379
= 11,45-2,12 x 100% = 5.736729%
Dari histerisis tersebut dapat dijadikan grafik. Berikut ini
merupakan grafik histerisis dari pengukuran naik dan turun
tersebut.
43
Pembacaan Naik
Hysterisis
15
10
Pembacaan Naik
5
Pembacaan
Turun
0
0
5
10
15
Pembacaan Standart
Gambar 4.5 Grafik Hysterisis
Akurasi :
Yn-Xn
A =1-│
│x 100%
Yn
Dengan :
Yn = Pembacaan Standar
Xn = Pembacaan Alat
6,98-6,83
A =1-│
│x 100%
6,98
= 97.91441%
Setelah diketahui karakteristik statik dari alat ukur rpm,
langkah berikutnya adalah kalibrasi alat ukur. Yang digunakan
sebagai kalibrator adalah regulator standard. Berikut ini
merupakan hasil pengukuran kalibrasi untuk mencari nilai
ketidakpastian alat ukur.
Tabel 4.2 Data Kalibrasi
No
Range
1
2
2
2
4
4.08
3
6
5.98
Standar
Pembacaan
Alat
Y
Yreg
Residu
SSR
2.14
-0.04
-0.0139
-0.0260
0.00067
4.016
-0.05
0.0618
-0.1118
0.01250
5.949
-0.04
0.1379
-0.1779
0.03167
44
Tabel 4.3 Tabel Lanjutan
4
8
7.99
7.86
0.09
0.2145
-0.1245
0.01550
5
6
10
9.98
9.6755
0.22
0.2898
-0.0698
0.00488
12
11.86
11.1877
0.6
0.3645
0.2354
0.05545
SSR =
0.12070
Jumlah
41.89
40.8282
0.78
Rata2
6.981
6.8047
0.13
Berikut merupakan perhitungan ketidakpastian alat ukur
berdasarkan tabel 4.4.
σ=
√∑ (yi -y̅ )2
n-1
√0,002021931
5
Dimana, σ = 0.2533
Sehingga nilai ketidakpastian tipe A adalah :
σ=
Ua1 =
Ua1 =
σ
√n
0,2533
√5
=0,08955
Sedangkan nilai ketidakpastian regresi Ua2 adalah
SSR
Ua2 = √
n-2
Dimana :
SSR (Sum Square Residual) = ƩSR(Square Residual)
SR = R2 (Residu)
Yi (Nilai koreksi) = Pemb. standar (ti) – Pemb. alat (xi)
Yreg=a+(b x ti)
a= y̅+(b
x t̅i )
i
45
b=
n . ∑ ti yi - ∑ y . ∑ ti
;
2
n . ∑ ti - (∑ ti )2
ti=Pemb.standar,
yi=Nilai koreksi, n=Jumlah data
(5 x 1,90661 ) –(0,1085 x 41,89)
b=
(5
(41,89)2
x 360,5069)-
b = 0,03846
Sehingga nilai :
a= y̅+(b
x t̅i )
i
a= 0,018083333+(0,009481958 x 6,981666667 )
a = -0,093164
Jadi, persamaan regresi menjadi
Yreg=(-0,048116537)+(ti x (0,009481958))
yang menghasilkan nilai SSR = 0,040103535
0.12070753
6-2
Ua2 = √
Ua2 = 0.1418
Nilai ketidakpastian tipe B
Pada ketidakpastian tipe B ini terdapat 2 parameter
ketidakpastia, yaitu ketidakpastian Resolusi (UB1) dan
ketidakpastian alat standar regulator DC (UB2). Berikut ini adalah
perhitungan ketidakpastian tipe B :
UB1 =
UB2 =
1
x
2
Resolusi
√3
a
k
,
=
1
x
2
o,o1
√3
= 0,003
46
dikarenakan pada alat standar terdapat sertifikat kalibrasinya maka
nilai a (ketidakpastian sertifikat kalibrasi) dianggap mendekati 0,
dan nilai faktor cakupan dianggap 2,0. Sehingga hasil : UB2 = 0
Nilai ketidakpastian kombinasi Uc :
Uc =
U AI U A2 U B1 U B 2
Uc =
0,0895544 2 0,1418376 2 0,003 2 0 2
2
2
2
2
Uc = 0.167770443
Dengan kondisi V atau derajat kebebasan dari kedua tipe
ketidakpastian, sebagai berikut :
V = n-1, sehingga :
V1 = 5; V2 = 5; V3 = ∞; V4 = 60 (berdasarkan table T)
Dengan nilai Veff (Nilai derajat kebebasan effektif) sebagai berikut
:
(Uc )4
Veff =
4
∑ (Ui ) ⁄V
i
Veff =
(0.16777)4
0.0895544 4⁄ + 0.14183764⁄ + 0 + 0,004⁄
60
5
5
Veff = 11.82332489
Sehingga, jika dibulatkan menjadi 10, dimana pada table Tstudent menghasilkan nilai k (faktor koreksi) sebesar 2,228.
Oleh karena itu, hasil nilai ketidakpastian diperluang sebesar :
Uexp =k x Uc
Uexp =2,228x 0.1677 = 0.373792547
Sehingga berdasarkan perhitungan ketidakpastian diperluas diatas,
menghasilkan nilai ketidakpastian alat sebesar ±0 0.373792547.
47
dengan tingkat kepercayaan 95% dari tabel T-Student. Nilai
ketidakpastian tersebut akan menjadi acuan untuk pembacaan alat
ukur selama alat ukut tersebut digunakan.
4.1.3 Pengambilan Data
Berikut merupakan data dari hasil percobaan menggunakan
pembangkit sinyal (signal generator) merangkai rangkaian
operational amplifier inverting, non-inverting, differentiator,
integrator. Rangkaian dibuat menggunakan resistor sebesar 4.7 K
Ω dan kapasitor keramik sebesar 100 nJ dengan sinyal masukan
berupa sinyal kotak, sinyal segitiga, dan sinyal sinusoida.
a,
Rangkaian Non-Inverting
Dengan menggunakan penggunaan 2 buah resistor 4.7 K Ω
maka besar Gain yang dihasilkan sebesar 2 kali penguatan.
Tabel 4.4 Pembacaan Tegangan Sinyal Sinusoida
Data opamp Non Inverting Sinyal Sinusoida
Vpp
(V)
Sampling 1
(V)
Sampling 2
(V)
Sampling 3
(V)
Sampling 4
(V)
Sampling 5
(V)
1
0.26
1.32
1.80
1.28
0.15
2
0.37
1.76
3.83
1.00
0.28
3
0.18
1.38
5.88
1.29
0.95
4
0.72
2.24
7.93
3.34
0.22
5
1.03
4.33
9.88
5.32
1.82
48
Gambar 4.6 Opamp Non-Inverting Sinyal Sinusoida
Tabel 4.5 Pembacaan Tegangan Sinyal Segitiga
Vpp
(V)
Data opamp Non Inverting Sinyal Segitiga
Sampling 1
Sampling 2
Sampling 3
Sampling 4
(V)
(V)
(V)
(V)
Sampling 5
(V)
1
0.60
1.28
1.62
1.45
0.60
2
0.95
1.32
3.31
2.05
0.67
3
2.41
4.50
5.28
4.28
0.97
4
1.44
2.21
7.17
2.27
1.39
5
0.47
2.23
9.02
1.92
0.31
Gambar 4.7 Opamp Non-Inverting Sinyal Segitiga
49
Tabel 4.6 Pembacaan Tegangan Sinyal Kotak
Data opamp Non Inverting Sinyal Kotak
Sampling 2
Sampling 3
Sampling 4
(V)
(V)
(V)
Vpp
(V)
Sampling 1
(V)
Sampling 5
(V)
1
1.91
0
1.91
0
1.91
2
4.00
0
4.00
0
4.00
3
6.09
0
6.09
0
6.1
4
8.23
0
8.23
0
8.23
5
10.3
0
10.3
0
10.3
Gambar 4.8 Opamp Non-Inverting Sinyal Kotak
Tabel 4.7 Pembacaan Tegangan Sinyal Ramp
Data opamp Non Inverting Sinyal Ramp
Sampling 2
Sampling 3 Sampling 4
(V)
(V)
(V)
Vpp
(V)
Sampling 1
(V)
Sampling 5
(V)
1
0.14
1.35
1.6
0.78
0.12
2
0.15
0.76
3.3
2.18
0.47
3
0.29
1.74
5.22
3.11
0.41
4
1.03
2.21
6.92
4.43
0.42
5
1.51
2.45
8.61
4.21
0.41
50
Gambar 4.9 Opamp Non-Inverting Sinyal Ramp
Tabel 4.8 Pembacaan Tegangan Sinyal Pulse
Data opamp Non Inverting Sinyal Pulse
Vpp
(V)
Sampling 1
(V)
Sampling 2
(V)
Sampling 3
(V)
Sampling 4
(V)
Sampling 5
(V)
1
0
1.16
1.82
1.54
0
2
0
1.2
3.4
2.21
0
3
0
3.36
5.5
3.67
0
4
0
2.89
3.18
1.64
0
5
0
2.58
8.8
2.6
0
Gambar 4.10 Opamp Non-Inverting Sinyal Pulse
51
b, Rangkaian Inverting
Dengan menggunakan penggunaan 2 buah resistor 4.7 K Ω
maka besar Gain yang dihasilkan sebesar 1 kali penguatan dan
sinyal yang dihasilkan akan memiliki beda fasa 180o.
Tabel 4.9 Pembacaan Tegangan Sinyal Sinusoida
Vpp
(V)
Sampling 1
(V)
1
2
3
4
5
0.22
0.66
0.51
0.82
1.63
Data opamp inverting Sinyal Sinusoida
Sampling 2
Sampling 3
Sampling 4
(V)
(V)
(V)
0.56
1.3
1.19
2.4
2.98
0.79
1.72
2.73
3.68
4.67
0.49
0.47
1.87
2.27
3.55
Sampling 5
(V)
0.19
0.12
0.98
0.94
1.12
Gambar 4.11 Opamp Inverting Sinyal Sinusoida
Tabel 4.10 Pembacaan Tegangan Sinyal Segitiga
Data opamp inverting Sinyal Segitiga
Vpp
(V)
Sampling 1
(V)
Sampling 2
(V)
Sampling 3
(V)
Sampling 4
(V)
Sampling
5
(V)
1
0.1
0.41
0.7
0.66
0.27
2
0.97
1.07
1.69
1.42
1.09
52
Tabel 4.11 Tabel Lanjutan
3
0.56
3.57
2.42
1.41
0.16
4
0.76
2.21
3.31
1.73
0.72
5
0.47
2.55
4.15
2.14
0.73
Gambar 4.12 Opamp Inverting Sinyal Segitiga
Tabel 4.12 Pembacaan Tegangan Sinyal Kotak
Vpp
(V)
Sampling 1
(V)
1
2
3
4
5
0.82
1.86
2.82
3.78
4.75
Data opamp inverting Sinyal Kotak
Sampling 2
Sampling 3
Sampling 4
(V)
(V)
(V)
0
0
0
0
0
0.82
1.86
2.82
3.78
4.75
0
0
0
0
0
Sampling 5
(V)
0.82
1.86
2.82
3.78
4.75
53
Gambar 4.13 Opamp Inverting Sinyal Kotak
Tabel 4.13 Pembacaan Tegangan Sinyal Ramp
Data opamp inverting Sinyal Ramp
Vpp
(V)
Sampling 1
(V)
Sampling 2
(V)
Sampling 3
(V)
Sampling 4
(V)
Sampling 5
(V)
1
0.14
0.43
0.66
0.52
0.34
2
0.15
0.73
1.54
1.32
0.95
3
0.29
1.51
2.45
1.67
0.41
4
0.21
2.21
3.18
2.24
0.37
5
0.44
1.42
4.15
1.36
0.69
Gambar 4.14 Opamp Inverting Sinyal Ramp
54
Tabel 4.14 Pembacaan Tegangan Sinyal Pulse
Data opamp inverting Sinyal Pulse
Sampling 2
Sampling 3
Sampling 4
(V)
(V)
(V)
Vpp
(V)
Sampling 1
(V)
Sampling 5
(V)
1
0
0.21
0.82
0.32
0
2
0
1.11
1.77
0.92
0
3
0
1.26
2.67
1.26
0
4
0
1.51
3.59
1.13
0
5
0
2.86
4.28
1.67
0
Gambar 4.15 Opamp Inverting Sinyal Ramp
c,
Rangkaian Summing
Dengan menggunakan penggunaan 2 buah resistor 4.7 KΩ dan
1 buah Resistor 2 KΩ, rangkaian summing biasanya menghasilkan
sinyal dc dengan gain yang besar karena terdapat dua input yang
diparalel dalam 1 masukan.
Tabel 4.15 Pembacaan Tegangan Sinyal Sinusoida
Data opamp summing Sinyal Sinusoida
Sampling 2 Sampling 3 Sampling 4
(V)
(V)
(V)
Vpp
(V)
Sampling 1
(V)
Sampling 5
(V)
1
0.45
1.1
2.83
1.01
0.54
2
0.28
1.33
5.98
1.47
0.32
55
Tabel 4.16 Tabel Lanjutan
3
0.53
4.88
8.97
3.62
1.42
4
2.52
6.8
11.9
7.02
2.45
5
4.15
9.63
12.9
3.89
0.79
Gambar 4.16 Opamp Summing Sinyal Sinusoida
Tabel 4.17 Pembacaan Tegangan Sinyal Segitiga
Data opamp summing Sinyal Segitiga
Sampling 2 Sampling 3 Sampling 4
(V)
(V)
(V)
Vpp
(V)
Sampling 1
(V)
Sampling 5
(V)
1
0.54
1.66
2.58
1.42
0.32
2
0.16
1.48
5.31
2.3
0.12
3
0.73
4.82
8.06
4.24
1.01
4
2.98
5.41
10.8
5.48
2.49
5
1.13
4.54
11.2
5.35
1.2
56
Gambar 4.17 Opamp Summing Sinyal Segitiga
Tabel 4.18 Pembacaan Tegangan Sinyal Kotak
Data opamp summing Sinyal Kotak
Sampling 2
Sampling 3 Sampling 4
(V)
(V)
(V)
Vpp
(V)
Sampling 1
(V)
Sampling 5
(V)
1
2.98
0
2.96
0
2.98
2
6.16
0
6.14
0
6.14
3
9.24
0
9.24
0
9.24
4
12.3
0
12.3
0
12.3
5
13.3
0
13.3
0
13.3
Gambar 4.18 Opamp Summing Sinyal Kotak
57
Tabel 4.19 Pembacaan Tegangan Sinyal Ramp
Data Opamp Summing Sinyal Ramp
Sampling 2
Sampling 3 Sampling 4
(V)
(V)
(V)
Vpp
(V)
Sampling 1
(V)
Sampling 5
(V)
1
0.62
1.17
2.52
1.79
0
2
0.21
2.36
5.04
0.91
0
3
0.97
3.71
7.43
1.82
0
4
1.03
4.46
9.79
4.13
0
5
1.4
4.93
12.5
6.8
0
Gambar 4.19 Opamp Summing Sinyal Ramp
Tabel 4.20 Pembacaan Tegangan Sinyal Pulse
Data Opamp Summing Sinyal Pulse
Sampling 2
Sampling 3
Sampling 4
(V)
(V)
(V)
Vpp
(V)
Sampling 1
(V)
Sampling 5
(V)
1
0
0
1.64
2.83
0
2
0
3.7
5.85
2.16
0
3
0
2.32
8.8
1.38
0
4
0
4.34
12.4
1.85
0
5
0
9.47
12.53
6.55
0
58
Gambar 4.20 Opamp Summing Sinyal Pulse
d, Rangkaian Diferential
Dengan menggunakan penggunaan 2 buah resistor 4.7 KΩ pada
masukan negatif dan 1 buah Resistor 2 KΩ pada masukan positif,
rangkaian diferential akan menghasilkan sinyal dc dari hasil
perbandingan masukan positif dan negatif.
Gambar 4.21 Opamp Diferensial Sinyal Sinusoida
59
Gambar 4.22 Opamp Diferensial Sinyal Segitiga
Gambar 4.23 Opamp Diferensial Sinyal Kotak
Gambar 4.24 Opamp Diferensial Sinyal Ramp
60
Gambar 4.25 Opamp Diferensial Sinyal Pulse
e, Rangkaian Differentiator
Dengan menggunakan penggunaan 1 buah resistor 4.7 K Ω dan
1 buah kapasitor 100 nJ, rangkaian differentiator digunakan untuk
membatasi sinyal masukan. Besar Gain yang dihasilkan
dipengaruhi kapasitor yang menguatkan tegangan menjadi besar.
Gambar 4.26 Opamp Differentiator Sinyal Kotak
61
Gambar 4.27 Opamp Differentiator Sinyal Segitiga
Gambar 4.28 Opamp Differentiator Sinyal Sinusoida
Gambar 4.29 Opamp Differentiator Sinyal Ramp
62
Gambar 4.30 Opamp Differentiator Sinyal Pulse
f, Rangkaian Integrator
Dengan menggunakan penggunaan 1 buah resistor 4.7 K Ω dan
1 buah kapasitor 100 nJ, rangkaian integrator biasanya
menghasilkan sinyal dc yang stabil bila dibandingkan dengan
penguat lainnya. Besar Gain yang dihasilkan dipengaruhi kapasitor
yang menguatkan tegangan menjadi besar.
Gambar 4.31 Opamp Integrator Sinyal Kotak
63
Gambar 4.32 Opamp Integrator Sinyal Segitiga
Gambar 4.33 Opamp Integrator Sinyal Sinusoida
Gambar 4.34 Opamp Integrator Sinyal Ramp
64
Gambar 4.35 Opamp Integrator Sinyal Pulse
4.2 Pembahasan
Pada Tugas Akhir modul operational amplifier, dilakukan
pengujian pada variabel terukur dengan pengambilan data
pembacaan berulang, pembacaan naik dan pembacaan turun yaitu
dengan melakukan pengujian dengan sensor yang digunakan,
dengan menggunakan alat ukur standart sebagai acuannya.
Tegangan keluaran modul operational diukur menggunakan
rangkaian pembagi tegangan sebagai alat ukur uji dan alat ukur
standar menggunakan multimeter. Data tegangan yang diukur
memiliki
rentang
2-12
Volt,
setelah
pengambilan
data selesai, dapat dilakukan perhitungan dari rata-rata koreksi,
akurasi dari sensor dan ketidakpastian diperluas dari hasil
perhitungan data tersebut yaitu 0.17; 97.71%; 0.374; dari sensor
pembagi tegangan dengan variabel volt. Rangkaian operational
amplifier dasar yang dibuat yaitu operational amplifier Inverting,
Non-Inverting,
Summing, Differential,
Integrator, dan
Differentiator.
Dari keseluruhan data, dilihat dari pengambilan data variabel,
pembacaan uji hampir menyerupai dengan pembacaan standar dan
variabel itu adalah Arus dan Volt. Variabel voltage memiliki error
2.086 %. Sehingga dapat dikatakan sensor tersebut dalam keaadaan
baik dan telah membaca variabel dengan kepresisian yang bagus,
dan hampir akurat.
BAB V
PENUTUP
5.1 Kesimpulan
Berdasarkan pengujian yang telah telah dilakukan, maka
didapatkan beberapa kesimpulan sebagai berikut:
1. Telah dirancang dan dibuat modul operational amplifier dengan
sistem monitoring tegangan, menggunakan sensor pembagi
tegangan, dimana pemrosesan sinyal keluaran sensor digunakan
ATMega 128. Output sensor akan dibaca ADC dari ATMega
128 dan akan ditampilkan pada display dan disimpan dalam
MMC. Pada monitoring ini didapat dari rangkaian pembagi
tegangan nilai ketidakpastian sebesar 0.17; akurasi sebesar
97.71%; dan koreksi sebesar 0.374.
2. Telah dibuat sistem monitoring tegangan yang ditampilkan
menggunakan LCD, dan disimpan menggunakan MMC sebagai
data logger dalam bentuk file “.txt”.
5.2 Saran
Adapun saran yang dapat diberikan dalam pembuatan modul
operational amplifier antara lain :
1. Sebaiknya ditambahkan rangkaian virtual ground untuk
menghasilkan sinyal output keluaran opamp dengan sedikit
noise.
2. Dalam melakukan pengambilan data lebih baik bila noise yang
dihasilkan dapat dikurangi secara signifikan.
65
66
(Halaman Ini Memang Dikosongkan)
DAFTAR PUSTAKA
[1] Clayton G. dan Winder Steve. 2004 Operational Amplifiers
Edisi kelima. Erlangga: Jakarta
[2] Atmel, 2015 Datasheet 8-bit AVR ATMega 128A.
[3] Bogart T.F, Jr. 1997 Electronic Devices And Circuits Edisi ke
empat Prantice Hall inc. New Jersey
[4] L. Wardhana, Belajar sendiri Mikrokontroller AVR Seri
ATMega32 Simulasi, Haerdware,dan Aplikasi, Yogyakarta:
Andi, 2006.
[5] Bentley, Principles of Measurement Systems in: Principles of
Measurement Systems., University of Teesside : Pearson,p.
Fourth Edition, 2005.
[6] Anonim, “Katalog Pudak Scientific”. Bandung.
[7] Selviyani S. , Rancang Bangun Sistem Monitoring Arus Dan
Tegangan Dc Berbasis Mikrokontroler Atmega32 Pada Turbin
Angin Horizontal Axis, Surabaya : ITS 2016
LAMPIRAN A
PENGUJIAN SENSOR
Tabel 1. Data Pengujian Sensor Tegangan
Pembacaan
Std
(V)
2
1
2
3
4
5
1
2
3
4
5
1
Rentang
Tegangan
(V)
2
2.02
2.05
1.82
2.08
1.95
2.14
1.95
2.1
2.1
2
4
4.08
4.18
4.33
4.12
3.9
3.94
4.34
3.87
4.15
3
6
5.98
5.98
5.91
6.29
6.38
6.33
5.87
6.36
4
8
7.99
8.2
8.26
7.96
7.7
7.71
7.7
8.08
5
10
9.98
10.11
10.23
9.6
10.12
10.04
10.1
6
12
11.86
11.35
11.41
11.47
11.32
11.57
12
No
Pembacaan Alat Naik (V)
Pembacaan Alat Turun (V)
Naik
Turun
Rata Rata
koreksi
2.11
1.98
2.08
2.032
-0.032
4.33
3.87
4.09
4.112
4.103
-0.023
6.28
6.2
6.01
6.18
6.144
6.161
-0.181
8.12
7.79
7.74
7.97
7.886
7.926
0.064
9.7
9.69
9.89
9.93
10
9.862
9.941
0.039
11.78
11.4
12
11.6
11.4
11.754
11.589
0.271
LAMPIRAN B
DATASHEET LM358
LAMPIRAN C
DATASHEET ATMEGA 128A
LAMPIRAN D
LISTING PROGRAM ATMEGA 128 PADA CODEVISION
/****************************************************
This program was produced by the
CodeWizardAVR V2.05.3 Standard
Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project :
Version :
Date : 30/12/2016
Author : MISTER
Company :
Comments:
Chip type
: ATmega128A
Program type
: Application
AVR Core Clock frequency: 8.00000 MHz
Memory model
: Small
External RAM size
:0
Data Stack size
: 1024
*****************************************************
/
#include <mega128.h>
#include <stdio.h>
#include <delay.h>
#include <stdlib.h>
#include <i2c.h>
#include <ds1307.h>
#include <alcd.h>
#include <sdcard.h>
#include <ff.h>
#include <spi.h>
#include <string.h>
/* FAT function result */
FRESULT res;
/* number of bytes written/read to the file */
unsigned int nbytes;
/* will hold the information for logical drive 0: */
FATFS fat;
/* will hold the file information */
FIL file;
/* will hold file attributes, time stamp information */
FILINFO finfo;
/* Timer1 overflow interrupt frequency [Hz] */
#define T1_OVF_FREQ 100
/* Timer1 clock prescaler value */
#define T1_PRESC 1024L
/* Timer1 initialization value after overflow */
#define
T1_INIT
(0x10000L(_MCU_CLOCK_FREQUENCY_/(T1_PRESC*T1_OVF_F
REQ)))
#define xtal 7372800L
#define baud 9600
#define ADC_VREF_TYPE 0x00
// Timer1 overflow interrupt service routine
interrupt [TIM1_OVF] void timer1_ovf_isr(void)
{
TCNT1H=T1_INIT>>8;
TCNT1L=T1_INIT&0xFF;
/* card access low level timing function */
disk_timerproc();
}
flash char * flash error_msg[]=
{
"",
"FR_DISK_ERR",
"FR_INT_ERR",
"FR_NOT_READY",
"FR_NO_FILE",
"FR_NO_PATH",
"FR_INVALID_NAME",
"FR_DENIED",
"FR_EXIST",
"FR_INVALID_OBJECT",
"FR_WRITE_PROTECTED",
"FR_INVALID_DRIVE",
"FR_NOT_ENABLED",
"FR_NO_FILESYSTEM",
"FR_MKFS_ABORTED",
"FR_TIMEOUT"
};
char buffer[100];
char filename[30];
unsigned int panjangdatammc;
unsigned char status,status_tulis;
unsigned int sector_size;
unsigned long int sector_count;
char display_buffer[64];
unsigned char counter_detik, vdc[8], counter_detik ;
unsigned int tegangann,j,tamp[33],nilai_adc,pinsensor,tump;
float Voltage,y, receive;
char FBuffer[100]="Fisika UB\n\r";
unsigned int bw;
float receive;
unsigned char lcd_buffer[33];
// Read the AD conversion result
unsigned int read_adc(unsigned char adc_input)
{
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage
delay_us(10);
// Start the AD conversion
ADCSRA|=0x40;
// Wait for the AD conversion to complete
while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10;
return ADCW;
}
float tegangan ()
{
nilai_adc = 0;
tamp[tegangann] = pinsensor;
for(j=0;j<20;j++)
{
pinsensor = read_adc(0);
nilai_adc = (nilai_adc + pinsensor);
delay_ms(1);
}
if(tegangann>20)tegangann = 0;
tump = nilai_adc/20;
Voltage = (((float)tump*5/1023)*3)-0.3;
return(Voltage);
}
void volt_lcd (void)
{
receive=y;
y=tegangan();
lcd_gotoxy(0,0);
lcd_putsf("V=");
lcd_gotoxy(4,0);
ftoa(y,2,vdc);
lcd_puts(vdc);
lcd_gotoxy(8,0);
lcd_putsf("V");
delay_ms(5000);
}
void init_mmc (void)
{
status=disk_initialize(0);
status=0;
lcd_puts("Init OK");
delay_ms(2000);
/* clear the LCD */
lcd_clear();
/* get the sector size */
if
(disk_ioctl(0,GET_SECTOR_SIZE,&sector_size)==RES_O
K)
{
/* sector size read OK, display it */
sprintf(display_buffer,"size=%1u",sector_size);
lcd_gotoxy(0,0);
lcd_puts(display_buffer);
/* wait 2 seconds */
/* clear the LCD */
/* get the sector count */
if
(disk_ioctl(0,GET_SECTOR_COUNT,&sector_count)==RE
S_OK)
{
/* sector count read OK, display it */
sprintf(display_buffer,"count=%lu",sector_count);
lcd_gotoxy(0,1);
lcd_puts(display_buffer);
}
else
lcd_puts("Error reading\nsector count");
}
else lcd_puts("Error reading\nsector size");
/* wait 2 seconds*/
delay_ms(2000);
lcd_clear();
}
void timer_mmc()
{
TCCR1A=0x00;
TCCR1B=0x05;
TCNT1H=T1_INIT>>8;
TCNT1L=T1_INIT&0xFF;
TIMSK=1<<TOIE1;
}
void stop_timer_mmc()
{
TCCR1A=0x00;
TCCR1B=0;
TCNT1H=T1_INIT>>8;
TCNT1L=T1_INIT&0xFF;
TIMSK&=~(1<<TOIE1);
}
void error(FRESULT res)
{
if ((res>=FR_DISK_ERR) && (res<=FR_TIMEOUT))
printf("ERROR: %p\r\n",error_msg[res]);
}
void display_status(char *file_name)
{
if ((res=f_stat(file_name,&finfo))==FR_OK)
{
}
}
//==============================================
==
void inisialisasi_fat(void)
{
timer_mmc();
for(;;)
{
if ((res=f_mount(0,&fat))==FR_OK)
{
break;
}
else
{
error(res);
}
}
stop_timer_mmc();
}
void reset_filename(void)
{
}
unsigned char i_reset;
for(i_reset=0;i_reset<30;i_reset++)
{
filename[i_reset]=0;
}
void file_data_suhu(void)
{
filename[0]='0';
filename[1]=':';
filename[2]='/';
filename[3]='o';
filename[4]='0';
filename[5]='m';
filename[6]='.';
filename[7]='t';
filename[8]='x';
filename[9]='t';
}
void file_baru(void)
{
reset_filename();
file_data_suhu();
timer_mmc();
res=f_open(&file,filename,FA_OPEN_ALWAYS
FA_WRITE);
if (res == FR_OK)
{
//res=f_write(&file, FBuffer, strlen(FBuffer),&bw);
lcd_puts("file berhasil dibuat");
delay_ms(2000);
|
f_close(&file);
}
else if (res == FR_EXIST)
{
//status=0;
lcd_gotoxy(0,1);
lcd_puts("file exist");
delay_ms(2000);
lcd_clear();
}
}
stop_timer_mmc();
void isi_file(void)
{
unsigned ulang;
reset_filename();
file_data_suhu();
display_status(filename);
for(ulang=0;ulang<10;ulang++)
{
timer_mmc();
res=f_open(&file,filename,FA_WRITE);
if (res==FR_OK)
{
lcd_puts("file siap tulis");
delay_ms(2000);
lcd_clear();
}
else
{
lcd_puts("error open");
delay_ms(2000);
lcd_clear();
}
res=f_lseek(&file,finfo.fsize);
if (res==FR_OK)
{
lcd_puts("set lokasi");
delay_ms(2000);
lcd_clear();
}
else
{
lcd_puts("error set");
delay_ms(2000);
lcd_clear();
}
res=f_write(&file,buffer,panjangdatammc+1,&nbytes);
if(res==FR_OK)
{
lcd_puts("data written");
delay_ms(2000);
lcd_clear();
}
else
{
lcd_puts("error write");
delay_ms(2000);
lcd_clear();
}
res=f_close(&file);
if(res==FR_OK)
{
lcd_puts("data written");
delay_ms(2000);
lcd_clear();
}
}
else
{
lcd_puts("error write");
delay_ms(2000);
lcd_clear();
}
}
stop_timer_mmc();
void volt_mmc (void)
{
panjangdatammc++;
buffer[panjangdatammc]='v';
panjangdatammc++;
buffer[panjangdatammc]='o';
panjangdatammc++;
buffer[panjangdatammc]='l';
panjangdatammc++;
buffer[panjangdatammc]='t';
panjangdatammc++;
buffer[panjangdatammc]=':';
panjangdatammc++;
buffer[panjangdatammc]=(pinsensor);
panjangdatammc++;
buffer[panjangdatammc]='V';
panjangdatammc++;
buffer[panjangdatammc]=13;
panjangdatammc++;
buffer[panjangdatammc]=10;
}
void main(void)
{
// Input/Output Ports initialization
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In
Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T
State1=T State0=T
PORTA=0x01;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=Out
Func1=Out Func0=Out
// State7=T State6=T State5=T State4=T State3=T State2=0
State1=0 State0=0
PORTB=0x00;
DDRB=0x07;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In
Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T
State1=T State0=T
PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In
Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T
State1=T State0=T
PORTD=0x00;
DDRD=0x00;
// Port E initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In
Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T
State1=T State0=T
PORTE=0x00;
DDRE=0x00;
// Port F initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In
Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T
State1=T State0=T
PORTF=0x00;
DDRF=0x00;
// Port G initialization
// Func4=In Func3=In Func2=In Func1=In Func0=In
// State4=T State3=T State2=T State1=T State0=T
PORTG=0x00;
DDRG=0x00;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=0xFF
// OC0 output: Disconnected
ASSR=0x00;
TCCR0=0x00;
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: 7372.800 kHz
// Mode: Normal top=0xFFFF
// OC1A output: Discon.
// OC1B output: Discon.
// OC1C output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer1 Overflow Interrupt: On
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
// Compare C Match Interrupt: Off
//TCCR1A=0x00;
//TCCR1B=0x05;
//TCNT1H=T1_INIT>>8;
//TCNT1L=T1_INIT&0xFF;
//ICR1H=0x00;
//ICR1L=0x00;
//OCR1AH=0x00;
//OCR1AL=0x00;
//OCR1BH=0x00;
//OCR1BL=0x00;
//OCR1CH=0x00;
//OCR1CL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer2 Stopped
// Mode: Normal top=0xFF
// OC2 output: Disconnected
//TCCR2=0x00;
//TCNT2=0x00;
//OCR2=0x00;
// Timer/Counter 3 initialization
// Clock source: System Clock
// Clock value: Timer3 Stopped
// Mode: Normal top=0xFFFF
// OC3A output: Discon.
// OC3B output: Discon.
// OC3C output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer3 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
// Compare C Match Interrupt: Off
//TCCR3A=0x00;
//TCCR3B=0x00;
//TCNT3H=0x00;
//TCNT3L=0x00;
//ICR3H=0x00;
//ICR3L=0x00;
//OCR3AH=0x00;
//OCR3AL=0x00;
//OCR3BH=0x00;
//OCR3BL=0x00;
//OCR3CH=0x00;
//OCR3CL=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
// INT3: Off
// INT4: Off
// INT5: Off
// INT6: Off
// INT7: Off
//EICRA=0x00;
//EICRB=0x00;
//EIMSK=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x04;
ETIMSK=0x00;
UCSR0A=0x00;
UCSR0B=0x10;
UCSR0C=0x06;
UBRR0H=(xtal/16/baud-1) >> 8;
UBRR0L=(xtal/16/baud-1) & 0xFF;
// USART1 initialization
// USART1 disabled
UCSR1B=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC disabled
ADMUX=ADC_VREF_TYPE & 0xff;
ADCSRA=0x83;
// SPI initialization
// SPI Type: Master
// SPI Clock Rate: 1843.200 kHz
// SPI Clock Phase: Cycle Start
// SPI Clock Polarity: Low
// SPI Data Order: MSB First
SPCR=0x50;
SPSR=0x00;
// TWI initialization
// TWI disabled
TWCR=0x00;
lcd_init(16);
lcd_clear();
// Global enable interrupts
#asm("sei")
init_mmc();
inisialisasi_fat();
file_baru();
while (1)
{
file_data_suhu();
display_status(filename);
lcd_clear();
volt_lcd();
counter_detik++;
if(counter_detik>=4)
{
lcd_clear();
lcd_gotoxy(0,0);
lcd_puts("simpan data");
volt_mmc();
isi_file();
delay_ms(1000);
lcd_clear();
}
}
}
BIODATA PENULIS
Nama lengkap penulis Arief Satyo Priyantoro
lahir di Surabaya, 25 September 1995. Penulis
merupakan anak kedua dari empat
bersaudara. Saat ini penulis berdomisili di
perumtas 3 blok f9, Wonoayu, Sidoarjo. Pada
tahun
2007
penulis
menyelesaikan
pendidikan tingkat dasar di SDN 04 Pagi
Bintaro, Jakarta Selatan, kemudian tahun
2010 penulis menyelesaikan pendidikan
tingkat menengah pertama di SMPN 178 Jakarta Selatan, lalu
penulis menyelesaikan pendidikan tingkat atas di SMA Kartika X1 Pesanggrahan Jakarta Selatan dan melanjutkan studi di Program
Studi D3 Metrologi dan Instrumentasi Jurusan Teknik Fisika FTIITS. Bagi pembaca yang memiliki kritik, saran atau ingin brdiskusi
lebih lanjut mengenai Tugas Akhir maka dapat menghubungi
penulis melalui email [email protected].