UNIT 1 (Transformator – pengujian efisiensi dan regulasi)
advertisement
")
UNIT 1 (Transformator – pengujian efisiensi dan regulasi)
Arus beban dan Efisiensi
100.00
90.00
80.00
Efisiensi
70.00
60.00
50.00
40.00
30.00
20.00
10.00
0.00
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
9.00
arus beban
Regulasi thd Arus Beban
6
5
Regulasi
4
3
2
1
0
0.00
1.00
2.00
3.00
4.00
5.00
Arus Beban
6.00
7.00
8.00
9.00
UNIT 2 (Hubungan primer dan sekunder trafo dan bilangan jam)
UNIT 3
UNIT 4
Unit 3.a
Kesimpulan sementara:
Efisiensi Transformator berbanding terbalik dengan pembebanan yang kita berikan.
Semakin naik beban yang diberikan maka nilai R makin naik sehingga perbandingan X/R menjadi kecil.
Unit 3.a.1
Unit 3.a.2
Unit 3.b
Unit 3.b.1
Unit 3.b.2
Kesimpulan sementara:
Regulasi berbanding lurus dengan power factor. Semakin besar nilai Regulasi, maka tegangan keluaran
semakin besar. Dengan nilai Tegangan output yang besar artinya faktor daya yang didapatkan semakin
besar. Karena Daya keluaran berbanding lurus dengan Tegangan output.
Unit 4.a
Kesimpulan sementara:
Untuk Grafik 4.a (atas)
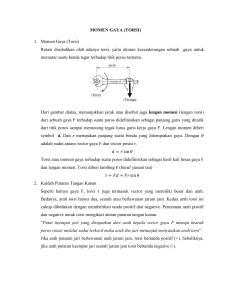
Jika torsi makin besar maka Ia makin besar. Berdasarkan rumus T=k.Φ.Ia
Dan jika Ia besar maka Kecepatan akan berkurang. Berdasarkan rumus N=(Vt-Ia.Ra)/KΦ.
Untuk Grafik 4.a (bawah)
Terlihat bahwa N (kecepatan) berbanding terbalik dengan Ia.
N=(Vt-Ia.Ra)/KΦ
Unit 4.b
UNIT 5
Junesly Milano 33699
Arief Budi M.
35231
Thevenin_Values =
VTh
Theta
1.2606e+002 1.1011e+000
RTh
XTh
2.0591e-001
4.9058e-001
Kesimpulan sementara:
Semakin tinggi nilai shaft speed maka nilai torsi juga meningkat
Nilai torsi terus meningkat sampai mencapai puncaknya pada saat nilai shaft speed 1500 rpm
Setelah 1500 rpm torsi menurun hingga mencapai nilai 0 pada saat shaft speed 1800 rpm
UNIT 5
clear;
p=4; f=60;
R1=0.2268; R2pr=0.12528; X1=0.51252;
X2pr=0.76878;Rc=185.1;Xm=9.8554;
V1=230/sqrt(3);
RcXm=Rc*j*Xm/(Rc+j*Xm);
VTh=RcXm*V1/(R1+j*X1+RcXm); ang=angle(VTh) *180/pi; VTh=abs(VTh);
ZTh=RcXm*(R1+j*X1)/(RcXm+R1+j*X1); RTh=real(ZTh); XTh=imag(ZTh);
Thevenin_Values=[ 'VTh' 'Theta'...
'RTh' 'XTh']
format short e
[ VTh ang RTh XTh ]
pause;
npts=99; s=linspace(0.00001,1,npts); s=fliplr(s); ws=2/p*2*pi*f;
R2pr0=R2pr; X2pr0=X2pr; smax=R2pr/sqrt(RTh^2+(XTh+X2pr)^2);
for i=1:npts
TTd(i)=3*VTh^2*R2pr/s(i)/ws/((RTh+R2pr/s(i))^2+(XTh+X2pr)^2);
nm(i)=(1-s(i))*ws*30/pi;
end
plot(nm,TTd); grid;
title('Speed-torque curve');
xlabel('Shaft speed, rpm'); ylabel('Torque (3T_d),N-m');
Parameter dikali dua
R1=0.2268*2; R2pr=0.12528*2; X1=0.51252*2;
X2pr=0.76878*2;Rc=185.1*2;Xm=9.8554*2;
Parameter dibagi dua
R1=0.2268/2; R2pr=0.12528/2; X1=0.51252/2;
X2pr=0.76878/2;Rc=185.1/2;Xm=9.8554/2;
UNIT 6
Kesimpulan Unit 5
Pembebanan berbanding lurus dengan kenaikan arus jangkar. Semakin besar beban yang
diberikan, maka arus jangkar akan naik.
Hal ini mempengaruhi kecepatan putar motor, dimana semakin besar arus jangkar, kecepatan
putar motor semakin kecil.
T = k Ia
Dari rumus diatas, arus jangkar sebanding dengan torsi dan berbanding terbalik dengan
kecepatan.
Sehingga dapat disimpulkan, penambahan beban menyebabkan kenaikan torsi dan penurunan
kecepatan.
Kesimpulan 6
Power_3phsignaldq menggunakan metode Discrete Three-Phase Programmable Source block
untuk menghasilkan tegangan 1 pu dengan beda fase 15 o urutan positif. Pada detik 0.05
tegangan naik menjadi 1.5 pu dan pada detik ke 0.1 terjadi ketidakseimbangan dengan adanya
penambahan 0.3 pu dengan urutan negatif. Dengan pergeseran fase sebesar -30o.
Sequence Analyzer menggunakan analisis Fourier yang mendeteksi gejala harmonik dan
ketidakseimbangan. Responnya pada step adalah sebuah siklus ramp. Transformasi abc-dq0
adalah instantenous. Ketidakseimbangan menghasilkan ripple pada keluaran tegangan V1 dan
Phi1.
UNIT 6
Kesimpulan Sementara :
Transformasi abc – dq0 mengubah besaran 3 fase (abc) ke sumbu dq0 (2 dimensi) direct axis,
quadrature axis, dan urutan nol.
Transformasi abc – dq0 dapat digunakan untuk mempermudah analisis dari mesin sinkron