Alat Ukur Intensitas Cahaya dan Suara Portabel
advertisement

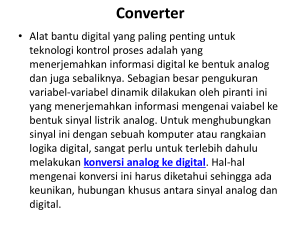
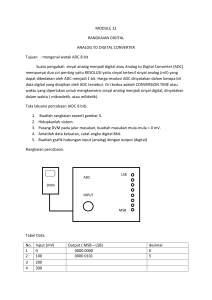
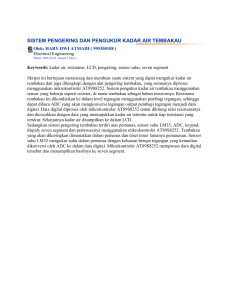
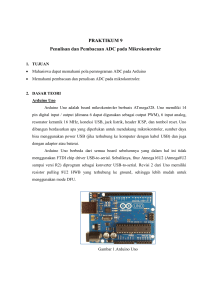
BAB II DASAR TEORI Pada bab ini akan dibahas mengenai definisi dan dasar teori yang menunjang dalam merancang pengukur intensitas cahaya dan suara. Antara lain dasar akustika dan pendengaran manusia, Light Dependent Resistor (LDR), mikrofon kondenser, tapis pembobot A dan C, True RMS to DC Converter. Bagian pengendali akan dijelaskan dasar mikrokontroler ATMega 8535 dan seven segment sebagai media penampil hasil pengukuran. 2.1. Cahaya 2.1.1. Definisi cahaya Cahaya adalah energi berbentuk gelombang elektromagnetik yang kasat mata dengan panjang gelombang sekitar 380-700 nm dan kecepatan merambat dalam ruang hampa sebesar 3x108 m/s. Intensitas cahaya merupakan jumlah energi radiasi yang dipancarkan oleh sumber cahaya ke suatu arah tertentu dan dinyatakan dengan satuan candela (cd) dengan lambang I. Intensitas penerangan di suatu bidang adalah fluk cahaya yang jatuh pada 1 m2 dari bidang itu dinyatakan dengan satuan lux dengan lambang E. Intensitas penerangan rata-rata dapat dihitung dengan persamaan berikut ini: Erata-rata = dimana Lux A ..........................2.1 E = fluk cahaya (lumens) A = luas bidang (m2) 5 2.1.2. Tranduser Isyarat Cahaya Tranduser berfungsi untuk mendeteksi perubahan cahaya dengan menggunakan LDR (Light Dependent Resistor). LDR yang digunakan adalah Cadmium Sulphide Photoconductive Cell. Berikut simbol dari LDR: Gambar 2.1. Simbol LDR LDR merupakan resistor yang nilai resistansi berubah-ubah sesuai dengan intensitas cahaya yang diterima. Pada kondisi terang cadmium sulphide mengalami penurunan resistansi, sehingga akan lebih banyak melepaskan muatan atau arus listrik meningkat. Saat cahaya gelap, resistansi sangat besar mencapai 1 MΩ dan ketika kondisi sangat terang maka resistansi akan sangat kecil hingga 0,1 Ω. Cadmium sulphide merupakan bahan semi konduktor dimana elektron hanya tersedia pada pita valensi dan membutuhkan energi untuk mengeksitasi elektron untuk berpindah. Jalur pada LDR dibuat melengkung menyerupai kurva agar jalur tersebut dapat dibuat panjang pada area yang sempit. Saat cahaya mengenai permukaan maka energi foton dari cahaya akan diserap sehingga terjadi perpindahan elektron dari pita valensi ke pita konduksi. Perpindahan elektron bebas mengakibatkan hambatan dari cadmium sulphide berkurang dan sebanding dengan intensitas cahaya yang mengenai LDR. 6 2.2. Suara 2.2.1. Dasar Akustika dan Pendengaran Manusia Akustika adalah bidang ilmu yang mempelajari tentang suara termasuk hal reproduksi, perambatan, dan akibat yang ditimbulkan. Menurut Kinsler dan Frey dari bukunya Fundamental of Acoustics, 3rd, akustika meliputi: Ultrasonics , daerah frekuensi lebih dari 20 kHz ACOUSTICS Sonics , daerah frekuensi antara 20-20 kHz Infrasonics , daerah frekuensi kurang dari 20 Hz Studi akustika saat ini semakin diperlukan karena meningkatnya kesadaran manusia akan akibat dari polusi akustik yaitu kerusakan pada indera pendengaran manusia akibat tekanan suara yang terlalu tinggi, lingkungan kerja yang memiliki taraf kebisingan yang melebihi batas dapat menurunkan produktifitas kerja. Kebisingan yang terus menerus dan di atas ambang batas kebisingan dapat menimbulkan gangguan psikis pada manusia. Definisi suara dari gejala gelombang adalah usikan pada sejumlah kecil volume udara yang diteruskan oleh sejumlah kecil udara di sekitarnya dan seterusnya yang mengandung mengandung informasi dan tenaga yang dirambatkan dari suatu tempat ke tempat lainnya. Partikel udara yang bergetar tidak merambat. Kepesatan udara merambat tergantung jenis media dan keadaan media. Sebagai contoh diudara pada suhu 20°C 343 meter/detik, sedangkan di air tawar pada suhu 20°C sebesar 14 meter/detik. Kepesatan itu dilambangkan dengan huruf c. c = .f ..........................2.2 7 dimana c = kepesatan bunyi (meter/detik) = panjang gelombang (meter) f = frekuensi (Hz atau 1/detik) Aras tekanan suara disebut Sound Pressure Level (SPL) mempunyai persamaan: Sound Pressure Level dalam dBSPL = 20 log dimana P P Pref ..........................2.3 = tekanan suara (Pa) Pref = tekanan referensi (2.10-5 Pa) Rata-rata percakapan manusia (average conversation) jika diukur dengan Sound Level Meter menunjukkan sekitar 70 dBA SPL, lalu mesin pemadat tanah misalnya menunjukkan 100 dBA SPL. Ambang tidak dengar telinga manusia (inaudible) ditetapkan sebesar 0 dBA SPL dan ambang sakit telinga manusia sekitar 140 dBA SPL. Dalam teknik audio pengukuran dilakukan dengan sumber sinyal dari sinyal elektrik juga jadi tidak diperlukan konversi dari besaran tekanan suara ke elektrik. Skala yang digunakan untuk sinyal audio adalah dBVoltrms dengan tegangan referensi 1 voltrms. Sebagai contoh tegangan 1 voltrms diperoleh dari sinyal masukan DC sebesar 1 volt atau sinyal AC sebesar 2,8 volt peak to peak. dBVoltrms = 20 log10 [ X / Vref] dimana X ..........................2.4 = tegangan masukan (VRMS) Vref = tegangan referensi (1 VRMS) 8 Contoh konversi voltrms ke dBVoltrms ditunjukkan pada tabel 2.1 berikut: Tabel 2.1. Konversi Vrms ke dBVrms Vrms 10 5 1 0.5 0.1 0.05 0.01 Vref 1 1 1 1 1 1 1 dBVrms 20 13.9794 0 -6.0206 -20 -26.0206 -40 2.2.2. Karakteristik Telinga Manusia Karakteristik telinga manusia dalam menanggapi suara dapat digambarkan sebagai berikut: Gambar 2.2. Kurva Fletcher Munson Gambar 2.2 menunjukkan respon telinga manusia terhadap frekuensi yang diterima. Pada frekuensi 100 Hz memiliki tingkat kekerasan sebesar 50 dB, maka akan memiliki tingkat kekerasan yang sama sebesar 40 dB pada frekuensi 1 KHz. 9 2.2.3. Tingkat Kebisingan Tabel 2.2. Taraf bising yang diizinkan Lamanya dengar Tanggapan SPL per hari (jam) dalam dBA 8 90 6 92 4 95 3 97 2 100 1.5 102 1 105 0.5 110 0.25 115 Berdasarkan Tabel 2.2 dapat dilihat bagaimana dan seberapa besar bising yang diizinkan untuk manusia dengar setiap harinya. Contoh: bunyi yang mempunyai tekanan suara sebesar 100 dBA SPL hanya boleh didengar oleh telinga manusia paling lama 2 jam, semakin tinggi tekanan suaranya maka semakin pendek waktu yang diizinkan. Jika melebihi taraf yang diizinkan maka akan menimbulkan kerusakan alat pendengaran. 2.2.4. Tranduser Isyarat Akustik Tranduser berfungsi untuk mendeteksi isyarat akustik yang ada di udara bebas, yaitu dengan menggunakan mikrofon. 10 Gambar 2.3. Struktur Mikrofon Kondenser Gambar 2.4. Ilustrasi pengubahan isyarat akustik ke elektrik Mikrofon yang digunakan menggunakan jenis tranduser elektrostatik seperti kapasitor, sering disebut mikrofon kondenser. Perubahan tekanan yang diterima tranduser mengakibatkan perubahan kapasitansi. Prinsip kerja tranduser ini adalah tekanan suara akan mengakibatkan perubahan kapasitansi dan mengubah jumlah muatan. Q = C.V ..........................2.5 Keterangan : C = kapasitansi (farad) V = tegangan keluaran (volt) Q = muatan (coulomb) 11 2.2.5. Tapis Pembobot A Tanggapan frekuensi audio yang dapat didengar oleh manusia adalah antara 20 Hz - 20.000 Hz. Gambar 2.5. Tanggapan frekuensi audio 20 hingga 20 KHz Tapis pembobot A (weighting filter A) mempunyai karakteristik penguatan mendekati respons dengar telinga manusia, sehingga tapis ini digunakan pada alat ukur yang dibuat. Berikut Gambar 2.5 yang menunjukkan karakteristik tapis pembobot A. 12 Gambar 2.6. Grafik respons frekuensi filter pembobot A dan C Tapis pembobot C, A dan B mempunyai fungsi pindah sebagai berikut: Hc(s) Ha(s) 4 π 2 12200 2 s 2 s 2 π 20.62 s 2 π122002 4 π 2 12200 2 s 4 ..........................2.6 s 2 π 20.62 s 2 π122002 s 2 π107.7 s 2 π 738 ..................2.7 2.3. Penguat Operasi Opamp merupakan salah satu hasil revolusi dalam bidang elektronika yang memungkinkan penggunaannya secara luas. Penguat operasi (opamp) adalah salah satu rangkaian linier yang sering digunakan dalam alat elektronik. Dalam tugas akhir ini opamp digunakan dalam beberapa hal antara lain, filter aktif dan penguat. 2.3.1. Penguat Membalik Penguat membalik merupakan salah satu konfigurasi dalam penggunaan opamp dengan keluaran yang berselisih fasa dengan masukan sebesar 180 derajat. 13 Pada Gambar 2.7 dengan asumsi opamp yang ideal maka pada masukan membalik dan tak membalik mempunyai beda tegangan sebesar 0 volt. Gambar 2.7. Konfigurasi Penguat Membalik Sehingga persamaan dari penguat membalik adalah sebagai berikut: ..........................2.8 ..........................2.9 2.3.2. Penguat Tak Membalik ……………Persamaan 2.14 Penguat tak membalik merupakan konfigurasi penguatan pada opamp, dimana masukan dan keluaran memiliki fasa yang sama. Pada Gambar 2.8 mengasumsikan keidealan opamp bahwa pada titik membalik dan tak membalik mempunyai beda tegangan sebesar 0 volt dan besar arus yang masuk ke masing-masing masukan adalah nol (IB = 0). Arus masukan dari VIN pada masukan tak membalik dan karena keidealan opamp sehingga pada titik membalik juga mendapat tegangan yang sama sehingga arus keluaran opamp mengalir melalui RF dan kemudian RG sehingga tidak 14 ada beda fasa pada masukan dan keluarannya Sehingga jika masukan berpolaritas positif, maka pada keluaran akan berpolaritas positif juga dan sebaliknya. Gambar 2.8. Konfigurasi Tak Membalik Opamp ..........................2.10 ..........................2.11 2.4. True RMS to DC Converter ……………Persamaan 2.16 Root Mean Square merupakan pengukuran untuk mengetahui nilai magnitude dari sinyal AC. Nilai RMS sinyal AC merupakan besarnya nilai sinyal DC yang dibutuhkan untuk menghasilkan panas pada sebuah beban. Sebuah sinyal AC dengan amplitudo 1 volt rms dan sinyal DC 1 volt akan menghasilkan panas yang sama pada sebuah resistor. Nilai RMS dapat dihitung dengan persamaan berikut ini : E RMS AVG .(V 2 ) ..........................2.12 15 Tabel 2.3. Nilai RMS Sinyal AC Sinyal 1VPP Gelombang Sinusoidal Gelombang Kotak Gelombang Gigi Gergaji Nilai RMS VP 2 0.707volt VP 1volt 1 VP 3 0.707volt 2.5. ADC (Analog to Digital Converter) ATMega8535 Pengubahan besaran analog ke digital diperlukan karena data dari sensor diolah dengan menggunakan mikrokontroler. Masukan ADC mikrokontroler dihubungkan ke sebuah 8 channel analog multiplexer yang digunakan untuk single ended input channel. Secara umum, proses inisialisasi ADC meliputi proses penentuan clock, tegangan referensi, format output data, dan metode pembacaan. Register yang perlu di atur nilainya adalah ADMUX, ADCSRA, dan SFIOR. ADMUX merupakan register 8 bit yang berfungsi menentukan tegangan referensi ADC, format data keluaran dan saluran ADC yang digunakan. Gambar 2.9. Register ADMUX Dalam memilih kanal ADC yang digunakan, atur nilai MUX4:0, misalnya kanal ADC0 sebagai input ADC, maka MUX4:0 diberi nilai 00000b. Tegangan referensi ADC dapat dipilih antara lain pada pin AREF, pin AVCC, atau menggunakan referensi 16 internal sebesar 2,56 volt. Fitur ADC jika ingin digunakan maka ADEN harus diberi logika high „1‟. Setelah konversi selesai (ADIF high), hasil konversi dapat diperoleh pada register hasil (ADCL, ADCH). Untuk konversi single ended, hasilnya adalah: ADC VIN .1024 VREF ..........................2.13 Dimana VIN adalah tegangan masukan pada kanal ADC, dan VREF adalah tegangan referensi untuk konversi. Jika menggunakan ADC 10 bit, maka dikalikan 1024 untuk mendapatkan nilai digital. 2.6. Mikrokontroler AVR Tipe ATMega8535 Secara garis besar arsitektur mikrokontroler ATMega8535 terdiri dari : a. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, Port D b. ADC 10 bit dengan 8 saluran (Analog to Digital Converter) c. 4 saluran PWM d. 4 sleep mode : Idle, ADC Noise Reduction, Power save, Power down, Standby dan Extended Standby e. 3 buah timer/counter f. Analog Komparator g. Watchdog timer dengan osilator internal h. 512 byte SRAM i. 512 byte EEPROM j. 8 Kb Flash memory dengan kemampuan Read While Write k. Unit interupsi (internal&eksternal) l. Port antarmuka SPI 8535 “memory map” 17 m. Port USART untuk komunikasi serial dengan kecepatan maksimal 2,5 Mbps n. Tegangan operasi 4,5 - 5,5 v, dan crystal 0 sampai 16MHz Gambar 2.10. Konfigurasi pin ATMega8535 ATMega 8535 memiliki jumlah kaki sebanyak 40 buah yang memiliki kegunaan sebagai berikut : a. VCC = pin masukan catu daya b. GND = pin ground c. Port A (PA0-PA7) = pin I/O (bidirectional), pin ADC d. Port B (PB0-PB7) = pin I/O (bidirectional), pin timer/counter, analog komparator, SPI e. Port C (PC0-PC7) = pin I/O (bidirectional), TWI, analog komparator, timer oscillator f. Port D (PD0-PD7) = pin I/O (bidirectional), analog komparator, interupsi eksternal, USART g. RESET = pin reset mikrokontroler h. XTAL1 dan XTAL2 = pin untuk clock eksternal i. AVCC = pin input tegangan ADC j. AREF = pin input tegangan referensi ADC 18 2.7. Dekoder 7447 Dekoder 7447 merupakan komponen yang digunakan untuk mengendalikan seven segment (common anode). Berikut ini merupakan konfigurasi dari dekoder 7447: Gambar 2.11. Konfigurasi IC Decoder 7447 Dekoder 7447 mendapatkan masukan BCD 4 bit dengan urutan 8, 4, 2, 1 kemudian keluaran dengan urutan a, b, c, d, e, f, g, dimana akan diubah menjadi pola tertentu agar bisa tertampil di seven segment. Masukan BCD akan aktif jika diberikan logika high „1‟ dan keluaran dari dekoder 7447 aktif low „0‟. Tegangan maksimum yang dibutuhkan untuk mengaktifkan dekoder 7447 adalah 7 volt dan tegangan masukan maksimal 5,5 volt. Di bawah ini merupakan tabel konversi nilai 4 bit masukan menjadi pola tertentu pada seven segment: Tabel 2.4. Tabel Kebenaran Dekoder 7447 19 2.8. Penampil Seven Segment Penampil seven segment secara umum digunakan untuk menampilkan informasi secara visual mengenai data-data yang sudah diolah. Seven segment tersusun atas 8 bagian yang setiap bagiannya merupakan LED (Light Emitting Diode). Gambar 2.12. Seven Segment Arus maju LED berkisar antara 10-20 mA untuk kecerahan maksimum, maka diperlukan hambatan agar LED tidak terbakar atau putus. Terdapat dua buah jenis seven segment yaitu jenis common anode dan common cathode. Ada beberapa cara untuk mengendalikan seven segment dengan mikrokontroler, diantaranya dengan menggunakan IC dekoder. 20