perancangan sistem pengontrolan pengukuran berat pada
advertisement

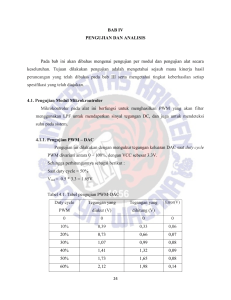
PERANCANGAN SISTEM PENGONTROLAN PENGUKURAN BERAT PADA TIMBANGAN KENDARAAN SECARA AUTOMATIS Julkarnine Marpaung, Eddy Warman Konsentrasi Teknik Energi Listrik, Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara (USU) Jl. Almamater, Kampus USU Medan 20155 INDONESIA e-mail: [email protected] Abstrak Dalam hal pengukuran massa, pengukuran massa biasanya dilakukan secara manual dengan menggunakan timbangan manual. Timbangan merupakan alat bantu untuk mengetahui berat suatu benda Salah satu penggunaan timbangan di bidang perindustrian dan untuk jalan umum, untuk mengetahui berat muatan suatu kendaraan. Pada tulisan ini, dirancang suatu alat pengontrolan berat muatan kendaraan dengan menggunakan mikrokontroller ATmega 8535 sebagai pengendali. Alat ini untuk menimbang berat muatan kendaraan secara otomatis. Alat ini menggunakan satu buah sensor yaitu load cell. Sensor diletakkan di tengah agar alat dapat menimbang secara baik. Pada saat alat mendeteksi adanya beban. Secara otomatis, sensor akan membaca dan mengirimkan sinyal ke mikrokontroler yang kemudian berat muatan kendaraan tersebut ditampilkan oleh LCD disertakan mengirim pesan lewat sms. Berdasarkan hasil analisis data yang dilakukan dengan skala 1 : 1000 yang artinya 1 kg tampilan di LCD sama dengan berat 1 ton yang sebenarnya. Pesan normal load akan terkirim apabila berat muatan kendaraan diantara 2000 kg ≤ 5000 kg. Apabila berat muatan kendaraan melebihi dari 5000 kg maka pesan over load akan terkirim. Kata kunci : Mikrokontroller AT89S52, LCD, Load cell, Motor stepper (DC) SRAM ,512 EEPROM ,32 bit in/out, timer/counter, 10 bitADC, 32 register umum, USART, dan fitur fitur yang lain. Sedangkan untuk mikrokontroler 89S52 dan memori eksternal 24c64 serta LC6 16x2 karakter. Adapun prinsip kerja mikrokontroller AT 89S52, yaitu[1, 2, 3]: 1. Pendahuluan Seiring dengan perkembangan Ilmu dan Teknologi di bidang Elektro yang begitu cepat dan telah membawa manusia ke era globalisasi, maka perlu ditemukan teknologi yang sesuai kebutuhan dan memiliki efisiensi serta efektivitas yang baik. Atas dasar pemikiran tersebut, penulis merasa bahwa aplikasi Ilmu Elektro telah dapat menggantikan sistem kontrol yang konvensional dengan teknologi ini. Praktek dan penerapan prototype bisa diaplikasikan pada industri kecil dan besar, baik sebagai proteksi dan efisiensi kerja. Detailnya, aplikasinya ini banyak digunakan pada Industri Kelapa sawit. a) Berdasarkan nilai yang berada pada register Program Counter, mikrokontroler mengambil data pada ROM dengan alamat sebagaimana yang tertera pada register Program Counter. Selanjutnya isi dari register Program Counter ditambah dengan satu (increment) secara otomatis. b) Instruksi yang diambil tersebut diolah dan dijalankan oleh mikrokontroler. Proses pengerjaan bergantung pada jenis instruksi, bisa membaca, mengubah nilainilai pada register, RAM, isi port, atau melakukan pembacaan dan dilanjutkan dengan pengubahan data. c) Program Counter telah berubah nilainya (baik karena penambahan otomatis pada langkah a), atau karena pengubahan- 2. Mikrokontroller AT89S52 Perancangan perangkat keras atau hardware telah ditetapkan dengan menggunakan mikrokontroller tipe AVR atmega 16 digunakan sebagai master dengan 16 Kbyte Flash program memori, 1Kbyte – 53 – copyright@ DTE FT USU SINGUDA ENSIKOM VOL.10 NO.27/Februari 2015 pengubahan pada langkah b). Selanjutnya yang dilakukan oleh mikrokontroler adalah mengulang kembali siklus ini pada langkah a). Demikian seterusnya hingga power dimatikan. 2.1 Sensor Load Cell Load cell adalah komponen utama pada sistem timbangan digital. Tingkat keakurasian timbangan bergantung dari jenis load cell yang dipakai. Sensor load cell apabila diberi beban pada inti besi maka nilai resistansi di strain gauge-nyaakan berubah yang dikeluarkan melalui empat buah kabel. Dua kabel sebagai eksitasi dan dua kabel lainnya sebagai sinyal keluaran ke kontrolnya, seperti ditunjukkan padaGambar 1 [4, 5]. Gambar2.Display LCD 16x2 2.3 Operasi Amplifier(Op-Amp) Op-amp merupakan penguat audio, pengaturan nada, osilator atau pembangkit gelombang, sensor circuit, dan sebagainya. Op-Amp banyak disukai karena faktor penguatannya yang besar (100.000kali). Adapun karakteristik ideal op-amp, yaitu [6]: a) Penguatan tegangan tak terhingga (Av=~), penguatan tegangan bergantung pada tegangan sumber Vcc. b) Impedansi input tak berhingga (Zin = ~). c) Bandwithnya mendekati tak hingga dengan demikian delay timenya hamper tak ada Bw = ~ t = 0. d) Impedansi Out put kecil sekali (Zout = 0) e) Vout = 0, jika Vin = 0. Op-amp yang dipakai pada perancangan ini adalah tipe IC LM 324, seperti yang diperlihatkan pada Gambar 3. Gambar 1.Bentuk fisik dari sensor load cell. 2.2 Display LCD 16 x 2 Display merupakan salah satu output yang berfungsi menampilkan pesan atau status sistem. Dalam hal ini, pesan proses misalnya membuka atau menutup pintu palang pesan data yaitu data berat muatan kendaraan yang terukur oleh sensor dan pesan status yaitu status normal atau tidak normal. Display yang digunakan adalah display CD tipe / M1632 yang dapat menampilkan 16 x 2 karakter. Merek display adalah HITACHI dengan kode H44780. Display dikendalikan langsung oleh Mikrokontroler ATmega 8535 pada port C. Gambar 2 menunjukkan Display LCD 16 x 2. Gambar 3.IC LM 324 – 54 – copyright@ DTE FT USU SINGUDA ENSIKOM VOL.10 NO.27/Februari 2015 palang keluar tidak bisa dibuka sekaligus mengirim pesan kepada pemilik yang isi pesannya adalah over load. Untuk membuka pintu palang keluar solusinya adalah dengan mengurangi berat muatan kendaraan. Flow chart perancangan cara kerja sistem ditunjukkan pada Gambar 5. 3. Perancangan Sistem Dan Cara Kerja Sistem Diagram blok pada Gambar 4 adalah diagram rancangan dasar system Perancangan sistem kontrol pengukuran berat padatimba ngan kendaraan secara automatis. Diagram menggambarkan aliran proses dari input hingga output, dimana input sistem ada beberapa masukan yaitu input data dari smart card dan input data dari smart card dan berat kendaraan yang ditimbang proses kerja sistem adalah mengolah input menjadi suatu output yang diinginkan yang akan dibahas lebih detail pada bagian berikutnya sebagai pemroses adalah sebuah rangkaian pengendali yaitu mikrokontroler output sistem adalah kondisi yang diberikan oleh mikrokontroler yaitu status proses dan kendali pintu palang, output juga menentukan pengiriman pesan melalui sms. Adapun bagian-bagian sistem adalah sebagai berikut : sensor, pengendali Mikrokontroler, Driver (penguat arus), Plant, Display, dan Handphone (pengirim pesan). Gambar 4.Diagram blok sistem Adapun cara kerja sistem ini adalah dengan cara membaca output dari sensor berat, jika berat yang diukur sesuai dengan berat yang diinginkan, maka lampu indikator warna hijau akan menyala yang menandakan bahwa pintu palang keluar bisa dibuka dengan menggunakan kartu pengenal (RFID) sekaligus mengirim pesan kepada pemilik yang isi pesannya adalah load normal, dan sebaliknya jika berat yang diukur melebihi kapasitas, maka lampu indikator warna merah akan menyala yang menandakan bahwa pintu Gambar 5.Flow chart perancangan kerja sistem – 55 – copyright@ DTE FT USU SINGUDA ENSIKOM VOL.10 NO.27/Februari 2015 Tabel 2 dan Tabel 3 serta Tabel 4. Analisa data dilakukan berdasarkan perhitungan penguatan tegangan pada persamaan (1). 4. Pengujian Dan Analisa Alat Pengujian rangkaian proximity reader adalah untuk mengetahui apakah proximity reader dapat menbaca kode dari kartu akses danmengirimkan kode tersebut rangkaian mikrokontroller AVR 8535. Adapun langkahlangkah pengujian adalah sebagai berikut : 1. Memasukkan catu daya pada rangkaian. 2. Memeriksa pin output dari RFID pada pin 9 dengan menggunakan logika probe. Adapun data hasil pengujian proximity reader diperlihatkan pada Tabel 1. = Pin 6 Tegangan Output (V) Mengidentifikasi Pulsa Keluar 0-5 Tidak Ada Pulsa 0 Tidak Mengidentifikasi ( ) (1) ( ) Jadi diperoleh hasil perhitungan berikut: = . . = 157.143 . (2) Adapun perhitungan deviasi dinyatakan pada persamaan (6).Faktor pengali (Q) dalam penyesuaian berat sesungguhnya dengan berat miniatur dari data pengujian. Tabel 1.Data hasil pengujian rangkaian proximity reader. Kondisi Proximity = = = ℎ =| 4.1 Pengujian Rangkaian Driver Load Cell dan Op-Amp Pengujian dilakukan pada rangkaian sensor yaitu load cell dan penguat yaitu untuk menguji respon sensor terhadap berat serta fungsi penguat dalam menguatkan sinyal keluaran sensor, diperlihatkan pada Gambar 6. (3) = − (4) (5) | ℎ (6) Jadi, diperoleh perhitungan sebagai berikut: = 370 = 4625 0.08 Tabel 2. Data hasil pengujian sensor load cell dan penguat operasi In TP1 TP2 TP3 TP4 TP5 no LCD (Kg) mV mV mV mV mV Gambar 6 Rangkaian driver load cell dan Opamp. Adapun data hasil pengujian sensor load cell dan op-amp; hasil analisa data op-amp tegangan; serta data percobaan perhitungan deviasi masing-masing ditunjukkan pada – 56 – 1 0.08 27.1 26.7 47.9 0.33 0.05 370 2 0.16 26.5 26.1 46.5 0.54 0.05 820 3 0.24 25.5 25 45 0.76 0.05 1240 4 0.32 25.3 24.9 38.5 0.98 0.05 1640 5 0.40 24.6 24.4 42.4 1.18 0.05 2060 6 0.48 24 23.6 41.1 1.37 0.05 2480 7 0.56 23.1 23.1 39.8 1.58 0.05 2900 8 0.64 22.6 22.5 38.3 1.51 0.05 3340 9 0.72 21.9 21.9 36.9 2.03 0.05 3770 10 0.8 21.2 21.2 35.4 2.25 0.05 4220 11 0.95 21.3 21.1 32.9 2.63 0.05 5000 12 0.98 21.1 20.8 32.3 2.73 0.05 5160 copyright@ DTE FT USU SINGUDA ENSIKOM VOL.10 NO.27/Februari 2015 Tabel 3. Hasil analisa data penguat operasi tegangan. NO Vin(-) Vout Vin A V V (+) V 1 2 3 4 5 6 7 8 9 10 11 12 No 1 2 3 4 5 6 7 8 9 10 11 12 0.0479 0.0465 0.045 0.0385 0.0424 0.0411 0.0398 0.0383 0.0369 0.0345 0.0329 0.0323 0.33 0.54 0.76 0.98 1.18 1.37 1.58 1.51 2.03 2.25 2.63 2.73 0.05 0.05 0.05 0.05 0.05 0.05 0.05 0.05 0.05 0.05 0.05 0.05 4.2 Pengujian Rangkaian Driver Motor Stepper atau Penguat Arus. Pengujian dilakukan pada rangkaian penguat arus yaitu penguat untuk menjalankan motor stepper, pengujian dilakukan dengan memberikan input pada rangkaian driver dan mengukur tegangan input dan output yaitu pada basis dan kolektor untuk transistor pada BD 139. Rangkaian driver motor stepper atau penguat arus ditunjukkan pada Gambar 8. 157.143 154.286 152 85.2174 155.263 153.933 154.902 129.06 154.962 154.11 153.801 154.237 Tabel 4.Data percobaan perhitungan deviasi Berat Berat Faktor Berat tampilan sesungguhnya pengali perhitungan LCD (Kg) (k) Kg (Kg) 0.08 370 4625 0.0718 0.16 820 5125 0.1593 0.24 1240 5166 0.2409 0.32 1640 5125 0.3086 0.4 2060 5150 0.4002 0.48 2480 5166 0.4818 0.56 2900 5178 0.5634 0.64 3340 5218 0.6489 0.72 3770 5236 0.7324 0.8 4220 5275 0.8199 0.95 5000 5263 0.9714 0.98 5160 5233 1.0025 Deviasi 0.008 0.006 0.009 0.001 0.002 0.001 0.003 0.008 0.012 0.01 0.021 0.016 Gambar 8 Rangkaian drivermotor stepper atau penguat arus. Adapun data pengujian rangkaian driver motor stepper atau penguat arus, dirangkum pada Tabel 5. Tabel 5 Data pengujian rangkaian drivermotor stepper atau penguat arus Adapun grafik berat tampilan outputterhadap berat sesungguhnya, ditampilkan pada Gambar 7. L O G 0 1 V B1 V B2 V B3 V B4 V C1 V C2 V C3 VC 4 0 0.6 0 0.6 0 0.6 0 0.6 12. 0.2 12. 0.2 12. 0.2 12 0.2 Adapun perhitungannya, yaitu: pada Logika 1, = (7) Dimana, =ℎ × ;ℎ = Gambar 7. Grafik berat tampilan output terhadap berat sesungguhnya = 110; = + − Jadi, diperoleh perhitungan sebagai berikut: – 57 – copyright@ DTE FT USU SINGUDA ENSIKOM = VOL.10 NO.27/Februari 2015 12 − 0.61 = 0.00251 4700 2. Lampu indikator warna hijau akan menyala dan kendaraan boleh keluar. 3. Pesan over load akan terkirim apabila berat muatan kendaraan melebihi 5000kg, lampu indikator warna merah akan menyala = 110 × 0.00251 = 0.27617 = 0.00251 + 0.27617 = 0.27868 = 12.41 − 0.2 = 44.2119 ℎ 0.27617 Daftar Pustaka Adapun Tabel 6, menunjukkan data resistansi tahanan dalam motor DC. [1] http:/www.atmel/products/prod20.html [2] Lingga Wardhana, “Mikrokontroler AVR seri ATM 8535 simulasihardware dan aplikasi”, ANDI, Jakarta, 2006. [3] Syablan Rangkuti, “Mikrokontroler ATMEL AVR Simulasi dan praktek ISIS & PROTEUS Code vision AVR”, Jakarta, 2011 [4] Aris Agung Setyawan, “Load Cell Handbook”, [5] www.loadcellteori.wordpress.com [6] Bruce Carter,Hand book of Operational amplifier applications. Tabel 6 Data resistansi tahanan dalam motor DC. Logika No 1 1 0.00251 0.27617 0.2786 44.2119 1 2 0.00251 0.27617 0.2786 44.2119 1 3 0.00251 0.27617 0.2786 44.2119 1 4 0.00251 0.27617 0.2786 44.2119 4.3 Pengujian Pin AT MEGA 8535 Bagian ini merupakan pemroses keseluruhan dari sistem ini. Rutin yang dikerjakan ditulis dalam bahasa C yang selanjutnya didownload pada memori internal yang tersedia. Adapun data hasil pengujian pin AT MEGA 8535 ditunjukkan pada Tabel 7. Tabel 7. Data hasil pengujian pin AT MEGA 8535. Teg Teg Teg Teg.Pin Pin Pin Pin Pin Pin Pin Pin (V) (V) (V) (V) 1 0.06 11 5 21 5 31 1.66 2 0.06 12 5 22 1.61 32 5 3 0.06 13 5 23 1.61 33 5 4 0.06 14 5 24 1.61 34 5 5 0.06 15 5 25 1.74 35 5 6 0.06 16 5 26 1.74 36 5 7 5 17 1.79 27 1.66 37 5 8 5 18 1.79 28 1.57 38 5 9 0 19 2.19 29 1.66 39 5 10 5 20 0 30 1.66 40 5 5. Kesimpulan Dari hasil analisis perhitungan dan pengukuran deviasinya sangat kecil yang artinya sistem bekerja akurat. Pada perhitungan didapat hasil: 1. 0.971452508kg sementara pengukuran sebenarnya 0.95kg jadi hasil deviasinya sebesar 0.021453.Pesan normal load akan terkirim apabila berat muatan kendaraan 2000 kg ≤5000 kg – 58 – copyright@ DTE FT USU