cara pengasutan / starting
advertisement

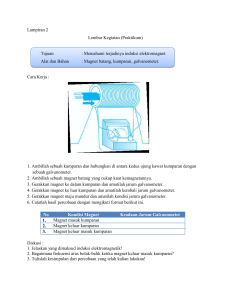
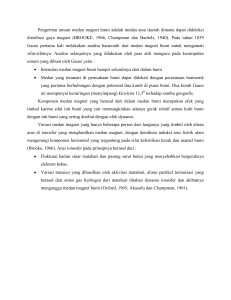
TUGAS TEKNIK TENAGA LISTRIK Disusun oleh: Dwi Ayu Putri (03091002077) JURUSAN TEKNIK PERTAMBANGAN FAKULTAS TEKNIK UNIVERSITAS SRIWIJAYA INDRALAYA 2011 CARA PENGASUTAN / STARTING Semua mesin listrik dengan daya lebih besar dari 370 W/0.37 Kw harus disuplai melalui sebuah pengasut motor yang tepat. Hal ini disebabkan oleh pada motor-motor AC dengan daya besar atau diatas 500 W pada saat starting awal akan menarik arus yang cukup besar untuk membangkitkan torsi, (daya putar) awal pada motor, untuk itu diperlukan sebuah sistem pengasutan yang tepat untuk tujuan proteksi. Beberapa jenis pengasut motor yang umum digunakan adalah: 1) Pengasut Langsung (Direct On Line) Rangkaian untuk pengasut langsung (DOL Direct On Line) akan memutus atau menghubungkan suplai utama ke motor secara langsung. Karena arus pengasutan motor dapat mencapai tujuh / delapan kali lebih besar dari arus kondisi normal, maka pengasut langsung ini hanya digunakan untuk motor-motor kecil dengan daya kurang dari 5 Kw. Gambar 1. Direct On Line Starter Rangkaian pengasut langsung ini ditunjukkan oleh gambar. Jika tombol mulai (Start) ditekan maka arus akan mengalir dari fasa merah (R) melalui rangkaian kendali dan kumparan kontaktor ke fasa biru. Arus ini akan mengkatifkan kumparan kontraktor sehingga kontaktor akan menutup untuk menghubungkan suplai 3 fasa ke motor. Jika tombol mulai dilepaskan rangkaian kendali akan tetap dipertahankan seperti semula melalui sebuah kontak penahan. Jika selanjutnya tombol berhenti (stop) ditekan atau jika kumparan-kumparan beban lebih bekerja maka rangkaian kendali akan terputus dan kontaktor akan membuka untuk memutuskan suplai listrik 3 fasa ke motor. Penghubungan kembali suplai ke motor hanya dapat dilakukan dengan menekan kembali tombol mulai, jadi rangkaian ini juga dapat memberi proteksi terhadap kehilangan tegangan suplai. Untuk aplikasi-aplikasi industri dimana digunakan motor-motor dengan kapasitas daya yang besar, rangkaian pengasutan harus dirancang agar dapat mengurangi kelebihn arus asut. Salah satu metode yang digunakan ialah pengasutan bintang delta. 2) Pengasutan Bintang Delta Untuk 3 buah beban, misalnya belitan-belitan dari otor 3 fasa, dihubungkan dalam hubungan bintang, maka arus saluran akan bernilai sepertiga dari nilai yang dimiliki jika beban yang sama dihubungkan dalam hubungan delta, sebuah pengasut yang mula-mula dapat menghubungkan belitan-belitan motor dalam hubungan bintang & kemudian mengubahnya dalam hubungan delta akan dapat mengurangi arus lebih pengasutan. Susunan rangkaian untuk pengasutan bintang delta (star delta) ini diperlihatkan pada gambar. Untuk kondisi pengasutan, belitan-belitan motor dihubungkan dalam hubungan bintang pada titik a-b-c dari ujung-ujung belitan melalui sebuah kontaktor pembentuk hubungan bintang. Hal ini akan dapat mengurangi besarnya tegangan fasa sebesar 58 % dari tegangan kerja motor dalam kondisi berputar normal serta mengurangi arus & besarnya torsi motor. Jika motor telah berputar maka sebuah saklar ganda akan mengubah hubungan belitan motor dari hubungan bintang ke hubungan delta sehingga dapat diperoleh arus asut minimum dan torsi motor dalam kondisi berputar yang maksimum. Pengasut motor ini harus juga dengan perlatan proteksi beban lebih serta proteksi terhadap terjadinya kehilangan tegangan, walaupun pada gambar peralatan proteksi tidak ditunjukkan. Gambar 2. Pengasutan Bintang Delta 3) Pengasutan dengan Autotransformator Sebuah pengasutan motor dengan Autotransformator merupakan salah satu metode lain yang dapat digunakan untuk mengurangi besarnya arus pengasutan motor dengan jalan mengurangi besarnya tegangan selama proses-proses awal pengasutan karena pengurangan tegangan akan berakibat pada berkurangnya torsi asut maka tegangan akan direduksi secukupnya saja untuk mengurangi arus pengasut, dengan cara memilih tingkat tegangan tertentu di kenal sebagai tapping tegangan. Rangkaian pengasutan dengan autotrafo ditunjukkan pada gambar dengan memposisikan saklar pada posisi mulai (Start) maka akan diperoleh hubungan seri antara belitan-belitan auto trafo, dengan belitan pengasut motor yang terhubung delta. Ketika kecepatan puataran motor telah cukup tinggi, maka saklar dipindahkan ke posisi jalan (Run) yang akan menghubungkan belitanbelitan motor secara langsung ke suplai tegangan 3 fasa. Keuntungan dari metode pengasutan ini ialah hanya memerlukan 3 buah kawat penghantar penghubung antara rangkaian pengasut motor dan rangkaian motor walaupun tidak terlihat di dalam gambar. Pengasut motor ini juga dilengkapi juga dengan peralatan proteksi beban lebih serta proteksi terhadap terjadinya kehilangan tegangan. Gambar 3. Pengasutan dengan Autotrafo 4) Pengasutan Dengan Tahanan Rotor Untuk melakukan pengasutan motor dalam kondisi berbeban umumnya digunakan motor induksi dengan jenis rotor belitan karena memberi kemungkinan untuk melakukan penyambungan rangkaian rotor dengan tahanan luar melalui cincin slip dan sikat untuk meningkatkan torsi asut motor. Pada saat awal pengasutan motor, resistansi rotor luar adalah bernilai maksimum, kemudian seiring dengan meningkatnya putaran motor, resistansi rotor luar ini dikurangi secara bertahap hingga pada saat kecepatn penuh motor tercapai nilai resistansinya adalah nol dan motor bekerja normal sepertin halnya rotor motor sangkar. Rangkaian pengasut motor ini dilengkapi juga dengan peralatan proteksi beban lebih, proteksi terhadap terjadinya kehilangan tegangan serta system interlocking untuk mencegah terjadinya pengasutan motor dalam kondisi pengasutan motor dalam kondisi resistansi rotor tak terhubungkan. Rangkaian seperti pada gambar, tetapi rangkaian proteksinya tidak ditunjukkan. Pengaturan Putaran motor Induksi Motor induksi pada umumnya berputar dengan kecepatan konstan, mendekati kecepatan sinkronnya. Meskipun demikian pada penggunaan tertentu dikehendaki juga adanyã pengaturan putaran. Pengaturan putarari motor induksi memerlukan biaya yang aqak tinggi. Biasanya pengaturan mi dapat dilakukan dengan beberapa cara: 1. Mengubah jumlah kutub motor Karena ns = 120.f / p maka perubahan jumlah kutub (p) atau frekwensi (f) akan mempengaruhi putaran. Jumlah kutub dapat diubah dengan merencanakan kumparan stator sedemikian rupa sehinqga dapat menerima tegangan masuk pada posisi kumparan yang berbeda-beda. Biasanya diperoleh dua perubahan kecepatan sinkron dengan mengubah jumlah kutub dari 2 menjadi 4, seperti terlihat pada gambar berikut: 2 kutub menjadi 4 kutub 2. Mengubah frekwensi jala—jala. Pengaturan putararn motor induksi dapat dilakukan derigan mengubah-ubah harga frekwensi jala. Hanya saja untuk menjaga keseimbangan kerapatan fluks, perubahan tegangan harus dilakukan bersamaan dengan perubahan frekwensi. Persoalannya sekarang adalah bagaimana mengatur frekwensi dengan cara yang efektip dan ekonornis. Cara pengaturan frekwensi dapat dilakukan dengan menggunakarn solid state frequency converter 3. Mengatur tegangan jala-jala Dari persamaan kopel motor iriduksi di atas diketahui bahwa kopel sebanding dengan pangkat dua tegangan yang diberikan. Untuk karakteristik beban seperti terlihat pada gambar dibawah ini, kecepatan akan berubah dan n1 ke 2 untuk tegangan masuk setengah tegangan semula. Cara ini hanya rnenghasilkan pengaturan putaran yang terbatas (daerah pengaturan sempit). 4. Pengaturan tahanan luar Tahanan luar motor induksi rotor belitan dapat diatur, dengan demikian dihasilkan karakteristik kopel kecepatan yang berbeda-beda. Putaran akan berubah dan n1 ke n2 ke n3 dengan bertambahnya tahanan luar yang dihubungkan ke rotor. Kesirnpulan: Pengaturan putaran motor induksi umumnya mahal, sedangkan daerah pengaturan yang diperoleh tidak begitu lebar, kecuali cara pengaturan 2, yaitu pengaturan frekwensi jala. MOTOR ARUS SEARAH Motor arus searah adalah suatu mesin yang berfungsi mengubah tenaga listrik arus searah ( Listrik DC ) menjadi tenaga gerak atau mekanik, dimana tenaga gerak tersebut berupa putaran dari pada motor. Dalam kehidupan kita sehari – hari motor DC dapat kita lihat pada motor starter mobil, pada tape recorder, pada mainan anak–anak dan pada pabrik– pabrik motor DC digunakan untuk traksi, elevator, conveyor, dan sebagainya. dimana tidak ada perbedaan konstruksi antara motor DC dan generator DC. Bahan penting yang digunakan pada mesin – mesin arus searah adalah bahan ferogmagnetik. Garis–garis gaya magnet cenderung untuk melewati bahan – bahan yang termaksud jenis ini ( bahan yang permeabilitasnya jauh lebih besar dari 1 ) . Kutub-kutub magnet yang digunakan untuk mesin arus searah biasanya menggunakan magnet buatan yang dibuat dengan prinsip elektromagnetisme, yang pembuatanya adalah dengan melilitkan kawat email pada bahan feromagnetik yang kemudian di aliri arus searah. Prinsip dasar dari pembuatan kutub magnet buatan tersebut ialah hasil percoban oersted, yang menyatakan jarum kompas akan menyimpang apabila berada didekat kawat berarus. Jarum kompas akan menyimpang bila disekitarnya terdapaat medan magnet. Dari percobaan oersted dapat disimpulkan bahwa disekitar kawat berarus listrik terdapat medan magnet. Arah medan magnet yang terbentuk disekitar kawat yang berarus listrik diperoleh berdasarkan percobaan Maxwell. Bila arus listrik yang mengalir didalam kawat arahnya menjauhi pengamat ( maju ), maka medan yang terbentuk disekitar kawaat berarus arahnya searah dengan putaran arah jarum jam. Sebaliknya bilamana arus listrik yang mengalir didalam kawat arahnya mendekati kita ( mundur ) maka medan medan magnet yang berbentuk disekitar kawat arahnya berlawanan dengan arah jarum jam. Prinsip dasar dari motor arus searah adalah: apabila sebuah kawat berarus diletakan antara kutub magnet ( U – S ), maka pada kawat itu akan bekerja suatu gaya yang menggerakan kawat itu. Arah gerak kawat itu dapat ditentukan dengan “ KAIDAH TANGAN KIRI ” yang berbunyi sebagai berikut : Apabila tangan kiri terbuka diletakan antara kutub U dan S, sehingga garis-garis gaya yang keluar dari kutub utara menembus telapak tangan kiri dan arus didalam kawat mengalir searah dengan keempat jari, maka kawat itu akan mendapat gaya yang arahnya sesuai dengan arah ibu jari. Lihat gambar berikut : Gaya pada kawat berarus yang berada dalam medan magnet ini disebut gaya lorentz ,yang besarnya adalah : F = B L I Sin teta Newton Dimana : B adalah kerapatan fluk magnet dalam satuan weber L adalah pajang penghantar dalam satuan meter I adalah arus listrik yang mengalir dalam satuan ampere teta adalah sudut yang terbentuk antara arah medan magnet dengan arah arus yang mengalir pada kawat dalam satuan derajat (°) Kalau sebatang kawat terdapat diantara kutub U – S dengan garis garis gaya yang homogen ,sedangkan didalam kawat ini mengalir arus listrik yang arahnya menjauhi kita (+ ) , maka disebelah kanan kawat garis gaya kutub magnet dan garis gaya arus listrik sama arahnya dan disebelah kiri kawat arahnya berlawanan ,sehingga bentuk medan magnet akan berubah Dilihat dari sudut kegunaan utamanya,motor arus searah dapat dibagi dalam dua kelompok utama yaitu: motor Listrik dan Generator atau sering disebut dinamo. Suatu motor listrik pada intiya dapat dianggap terdiri dari bagian-bagian yang diam yang dinamakan stator (rangka atau ganbar) dan suatu bagian yang berputar dinamakan rotor, pada mesin arus searah lazim disebut jangkar. Dalam konversi energi, baik dari energi listrik ke energi mekanik (motor listrik) atau dari energi mekanik ke energi listrik (Generator) selalu melalui suatu medium medan magnit. Dalam hal ini ada 3 parameter yang selalu berinteraksi yaitu: 1. Fluksi magnit 2. Konduktor berarus 3. Gerak (force) Ketiga parameter tersebut dipenuhi dengan adanya: 1. Kumparan medan 2. Kumparan jangkar 3. Sistim poros dan bantalan Motor arus searah terdiri dari lima bagian utama yaitu: 1. Poros yang terbuat dari baja 2. Inti rotor terbuat dari plat dinamo 3. Kumparan Rotor 4. Kumparan medan 5. Komutator dilengkapi dengan lamel-lamel sebagai terminal kumparan jangkar motor Gambar 2.1 Bagian uatama mesin listrtik arus searah A. Stator/Rangka gandar Pada motor arus searah, gandar berfungsi sebagai bagian dari rangkaian magnetik yang biasanya di buat dari besi tuang. Pada gandar terdapat seperangkat kutub-kutub medan yang dibuat dari inti laminasi baja pelat dan kumparan medan dipasngkan pada kutub-kutub medan tersebut, seperti ditunjukkan pada gambar 2.2. Gambar 2.2 Stator dan rangka gandar Sepatu kutub dibuat dari besi lapis yang cukup tipis (plat dinamo) yang dijadikan satu, dimasukkan kedalam kumparan magnitnya yang telah di bungkus isolasi yang memadai. Sepatu kutub ini dipasangkan pada rangka (yoke) yang sekaligus jadi badan mesin dengan dua buah baut Bagian dalam badan motor arus searah (yoke) dibubut agar sepatu kutubnya mempunyai celah udara serapat mungkin (minimum) dan lingkaran dalam betul-betul bulat. Dalam rangka ini ditempatkan sejumlah pasang sepatu kutub. Pasangan kutub U dan S selalu berurutan seperti letak sepatu kutubnya dan ujung-ujung kawat kumparannya dihubungkan satu pada yang lain sehingga keluar hanya 2 ujung dan dipasang pada kotak klem dengan tanda huruf simbol F1 dan F2; pada kotak/plat klem itu juga ditempatkan klem untuk kabel peralatan sikat yang berhubungan dengan jangkar (armature) atau rotor dan diberi huruf simbol A1 dan A2 B. Kumparan Medan Kumparan medan juga dikenal dengan kumparam penguat untuk menghasilkan medan magnit pada kutub uama ( main pole ) .gambar 2.3 menunjukkan penepatan kumparan medan pada inti kutub. Gambar 2.3 penempatan kumparan medan C. Rotor atau Jangkar Rotor motor arus searah dilengkapi dengan komutator dengan lamel-lamel sebagai terminal kumparan jangkar motor dan dipasangkan pada poros. Rotor atau jangkar dibuat dari plat-plat tipis baja campuran dalam bentuk tertentu. Alur-alur pada jangkar dibuat untuk meletakkan lilitan jangkar , lihat gambar 2.4. Gambar 2.4 Rotor/jangkar D. Bantalan (Bearing) Bantalan pada motor/dinamo berfungsi sebagai: 1. Memperlancar gerak putar poros 2. Mengurangi gesekan putaran dan perlu diberi pelumas 3. Penstabil poros terhadap gaya horizontal dan gaya vertikal poros motor. Menurut tipe bantalan (bearing) dapat dibedakan antara lain: 1. Bantalan peluru 2. Bantalan roller 3. Bantalan bos. E. Tutup (End Plate) Tutup rangka mesin Gambar 2.5 Bagian tutup Pada setiap motor listrik atau generator mempunyai 2 (dua) buah tutup, masing masing ditempatkan pada dua sisi rangka di ikat dengan baut. Kedua tutup tersebut befungsi sebagai: 1. Dudukan bantalan poros motor/dinamo 2. Titik senter antara rotor/poros dengan rumah stator 3. Pelindung bagian dalam motor/dinamo F. Bagian Mekanik Sikat Arang Sikat karbon ditempatkan diatas perputaran komutator berfungsi sebagai jaringan untuk memindahkan arus antara jangkar dan kumparan medan. Peralatan sikat, terdiri dari pemegang sikat (A) yaitu tempat dudukan sikat yang diikatkan pada rangka mesin, (B) Sikat arang , (C) Komutator dan (D) Pegas. Dengan tekanan pegas sikat arang akan selalu menekan pada komutator tanpa mengganggu kelancaran putaran rotor. Setiap sikat terpasang pada dudukan sikat , yang disatukan dengan pegas untuk mempertahankan tekanan sikat yang konstan pada komutator. Perlengkapan (Rigging Brush) digunakan untuk dukungan pemegang sikat terdiri dari sepatu dan gagang sikat. Bagian-bagian mekanik sikat arang dapat dilihat pada gambar 2.5. Sekalipun sudah dibentuk, nyatanya kita tidak dapat membuat sikat arang berbentuk lengkungan seperti lengkungan komutatornya terutama ujung-ujung sikat arangnya. Bersihkan selalu serbuk arang dan abrasip lainnya dengan memakai sikat halus atau alat pengisap debu. CARA KERJA MOTOR ARUS SEARAH Motor arus searah merupakan salah satu mesin listrik yang mengubah energi listrik searah menjadi energi gerak. Motor arus searah banyak sekali dipakai, motor-motor kecil untuk aplikasi elektronik menggunakan motor arus searah seperti: pemutar kaset, pemutar piringan magnetik di harddisk komputer, kipas pendingin komputer, dan tentu saja mainan legendaris ‘tamiya’ menggunakan motor arus searah. Tentu saja untuk keperluan-keperluan yang berdaya besar, motor arus searah masih dipakai pada aplikasi tertentu. Gerak atau putaran yang dihasilkan oleh motor arus searah diperoleh dari interaksi dua buah medan yang dihasilkan oleh bagian ‘jangkar‘ (armature) dan bagian ‘medan‘ (field) dari motor arus searah. Pada gambar ilustrasi diatas, bagian medan berbentuk suatu kumparan yang terhubung ke sumber arus searah. Sedangkan bagian jangkar ditunjukkan sebagai magnet permanen (U-S), bagian jangkar ini tidak harus berbentuk magnet permanen, bisa juga berbentuk belitan yang akan menjadi elektro-magnet apabila mendapatkan sumber arus searah. Sehingga apabila motor arus searah kita berjenis jangkar belitan, maka kita harus menyediakan dua sumber arus searah, satu untuk bagian jangkarnya, satu lagi untuk bagian medannya. Bagian lain yang tidak kalah penting pada motor arus searah adalah adanya ‘komutator’ (comutator). Komutator merupakan suatu konverter mekanik yang membuat arus dari sumber mengalir pada arah yang tetap walaupun belitan medan berputar. Komutator berpasangan dengan ‘cincin belah‘ (slip-rings) untuk menjalankan tugas yang saya sebut baru saja. Pada gambar ilustrasi diatas, gambar lingkaran yang dibagi menjadi dua buah dan terhubung ke bagian belitan medan merupakan cincin belah yang saya maksud. Bagian yang digambarkan berbentuk kotak menempel pada cincin belah tersebut yang dinamakan komutator. Tentu saja pada aplikasi yang sebenarnya, jumlah cincin belah tidak hanya dua dan terhubung ke sejumlah banyak belitan medan. Sekarang bagaimana putaran dapat dihasilkan?? Untuk menjawab ini, tentu saja kita harus ingat aturan tangan kanan bahwa gaya, medan magnet, dan arus membentuk suatu sumbu tiga dimensi seperti ditunjukkan di gambar sebelumnya. Semua setuju bahwa medan magnet berarah dari kutub Utara (N) ke kutub Selatan (S), sehingga di gambar yang atas seharusnya ada medan magnet yang berarah dari N ke S. Interaksi adanya arus dan medan magnet dengan menggunakan aturan tangan kanan mengakibatkan munculnya gaya. Pada gambar yang atas, dapat dicoba sendiri, di konduktor yang dekat dengan kutub S akan muncul gaya ke arah atas, sebaliknya pada konduktor yang dekat dengan kutub N akan muncuk gaya ke arah bawah. Akibatnya bagian medan akan berputar karena adanya dua gaya yang berlawanan arahnya. Setelah satu putaran maka konduktor yang tadinya dekat dengan kutub S akan berpindah dekat ke kutub N, dan juga sebaliknya. Akibat adanya pasangan cincin belahkomutator, arus akan mengalir dengan arah yang tetap, walaupun konduktornya berganti, sehingga gaya pada titik tersebut akan selalu tetap arahnya. Begitu seterusnya sehingga motor arus searah akan berputar pada arah yang tetap. Secara sederhana, apabila sumber arus searahnya kita balik arahnya maka putaran yang dihasilkan akan berlawanan arah.