PERANCANGAN OTOMATISASI PINTU PADA SHELTER BUSWAY
advertisement

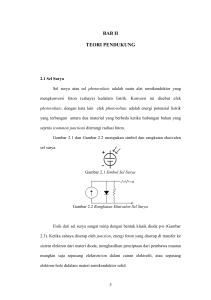
PERANCANGAN OTOMATISASI PINTU PADA SHELTER BUSWAY DENGAN MIKROKONTROLER AT89S51 Darmawan Julianto Jurusan Teknik Elektro, Fakultas Teknologi Industri, Universitas Gunadarma, Margonda Raya 100 Depok 16424 telp. (021) 78881112, 7863788 Tanggal Pembuatan : 27 Januari 2010 Pintu otomatis yang diaplikasikan pada jalur busway, diharapkan dapat memaksimalkan kinerja dari transportasi busway yang sudah ada. Komponen utama alat ini terdiri dari pasangan LED inframerah dengan photodioda yang digunakan sebagai sensor. Mikrokontroler AT89S51 berfungsi untuk mengendalikan buka/tutupnya pintu dan penampilan angka pada seven segment. Pada bagian sensor, LED berfungsi sebagai pemancar sinar inframerah dan photodioda berfungsi sebagai pendeteksi sinar inframerah dari LED yang dipantulkan oleh busway. Alat ini menggunakan 2 buah sensor. sensor 1 yang berada di ujung masuk shelter, berfungsi untuk membuka/menutup pintu shelter, sedangkan sensor 2 yang berada di ujung keluar shelter berfungsi untuk membuka/menutup palang pintu pada jalur busway. Berdasarkan uji coba yang telah dilakukan, sistem berfungsi dengan baik. Pintu shelter akan terbuka selama 30 detik ketika busway berhenti tepat didepan pintu shelter, dan palang pintu yang ada pada jalur busway terbuka ketika busway mulai bergerak untuk meninggalkan shelter. 1. PENDAHULUAN Dalam penerapan transportasi busway, masih banyak hal yang dapat mengurangi kinerja dari transportasi busway itu sendiri. Seperti waktu kedatangan busway yang belum teratur sehingga terjadi penumpukan penumpang dan busway di dalam satu waktu dan tempat tertentu. Terjadinya penumpukan dan ketidaktepatan kedatangan busway salah satunya disebabkan karena lamanya busway yang berhenti di suatu shelter tidak sama dengan busway yang lain, sehingga diperlukan suatu sistem yang dapat mengatur lamanya waktu pemberhentian busway di setiap shelter-nya. Untuk mengatasi masalah tersebut, diperlukan suatu sistem yang dapat mengatur berapa lama suatu busway berhenti di setiap shelter. Sistem yang dirancang pada penulisan ini dapat dilihat pada Gambar 1.1. menyala. Pada saat itu palang pintu pada jalur busway akan terbuka untuk memberi jalan busway tersebut. 2. LANDASAN TEORI 2.1 LED Inframerah LED Inframerah adalah dioda yang dapat memancarkan cahaya dengan panjang gelombang lebih panjang dari cahaya yang dapat dilihat tetapi lebih pendek dari gelombang radio, apabila LED Inframerah tersebut dilalui arus. Simbol dan bentuk fisik dari LED Inframerah diperlihatkan pada Gambar 2.1. Gambar 2.1 Lambang Infrared dan Bentuk Fisiknya Gambar 1.1 Sistem Otomatisasi Pintu Pada Shelter Busway Busway yang datang akan dideteksi oleh sebuah sensor yang dihubungkan ke motor yang akan membuka pintu shelter. Pintu shelter akan kembali menutup sesuai dengan waktu yang telah ditentukan. Kemudian busway meninggalkan shelter setelah lampu hijau yang berada dibagian luar dari shelter 2.2 Photodioda Photodioda digunakan sebagai komponen pendeteksi ada tidaknya cahaya inframerah. Photodioda mempunyai resistansi yang rendah pada kondisi forward bias, kita dapat memanfaatkan photodioda ini pada kondisi reverse bias dimana resistansi dari photodioda akan turun seiring dengan intensitas cahaya yang masuk. Lambang dan benuk fisik dari photodioda dapat dilihat pada Gambar 2.2. Gambar 2.2 Lambang dan Bentuk Fisik Photodioda 2.3 Operational Amplifier (Op-Amp) Sebuah pembanding adalah rangkaian dengan dua tegangan masuk (inverting (-) dan non inverting (+) dan satu tegangan keluaran. Bila tegangan terminal positif lebih besar dari pada tegangan terminal negatif, pembanding akan menghasilkan tegangan keluar yang tinggi (high). Bila masukan terminal positif lebih kecil dari pada masukan terminal negatif maka keluarannya rendah (low). Keluaran yang tinggi nilainya ‘ + saturasi’ dan keluaran yang rendah nilainya ‘- saturasi’. Untuk mendapatkan konsep dasar yang sederhana pada sebuah pembanding adalah dengan memasang sebuah Op-Amp tanpa tahanantahanan umpan balik. Bila masukan terminal negatif dihubungkan dengan tegangan masukan yang amat kecil (dalam satuan milivolt), sudah cukup untuk membuat Op-Amp menjadi jenuh. Karakteristik komparator diperlihatkan pada Gambar 2.5. Gambar 2.3 Bentuk Dasar Op-Amp Bentuk dasar dari Op-Amp dapat dilihat pada Gambar 2.3. Op-Amp terdiri dari dua masukan yaitu terminal non-inverting (+) dan terminal inverting (-). Umumya Op-Amp bekerja dengan dual suplly (VCC dan VEE), namun banyak juga Op-Amp dibuat dengan single supply (VCC - ground). Simbol rangkaian didalam Op-Amp pada Gambar 2.3 adalah parameter umum dari sebuah Op-Amp. Op-Amp memiliki Rin yang merupakan resistansi input yang nilai idealnya infinite (tak terhingga), Rout yang merupakan resistansi output dan besar resistansi idealnya 0 (nol), dan AOL yang merupakan nilai penguatan open loop dan nilai idealnya tak terhingga. Gambar 2.5 Karakteristik Op-Amp 2.4 Mikrokontroler Mikrokontroler adalah single chip komputer yang memiliki kemampuan untuk diprogram dan digunakan untuk tugas-tugas yang berorientasi kontrol. Pada perancangan alat ini digunakan mikrokontroler tipe AT89S51. Untuk konfigurasi Pin pada AT89S51 dapat dilihat pada Gambar 2.6. 2.3.1 Op-Amp Sebagai Pembanding Tegangan Pembanding tegangan akan membandingkan sebuah tegangan masukan dengan tegangan masukan lainnya. Gambar 2.4 menunjukkan pembanding tegangan sederhana. Vcc R1 V1 Vout V2 RL R2 Vcc Gambar 2.4 Rangkaian Pembanding Tegangan Gambar 2.6 Konfigurasi Pin Pada AT89S51 Berikut adalah penjelasan fungsi tiap pin pada seri mikrokontroler AT89S51: • Pin 1-8 Pin ini adalah port 1. Saluran/bus I/O 8 bit dua arah. Dengan internal pull-up yang dapat digunakan untuk berbagai keperluan. Pada port ini juga digunakan sebagai saluran alamat pada saat pemograman dan verifikasi. • Pin 9 Masukan reset (aktif tinggi), pulsa transisi dari rendah ke tinggi akan me-reset mikrokontroler ini. • Pin 10 sampai 17 Saluran/bus I/O 8 bit dua arah dengan internal pull-ups yang memiliki fungsi pengganti. Bila fungsi pengganti tidak dipakai, maka port ini dapat digunakan sebagai port paralel 8 bit serbaguna. Selain itu sebagian dari port 3 dapat berfungsi sebagai sinyal kontrol pada saat proses pemrograman dan verifikasi. • Pin 18 dan 19 Masukan ke penguat osilator berpenguat tinggi. Pada mikrokontroler ini memiliki seluruh rangkaian osilator yang diperlukan pada serpih yang sama (on chip) kecuali rangkaian kristal yang mengendalikan frekuensi osilator. Karenanya 18 dan 19 sangat diperlukan untuk dihubungkan dengan kristal. Selain itu XTAL 1 dapat juga sebagai masukkan untuk inverting oscilator amplifier dan masukkan ke rangkaian internal clock sedangkan XTAL 2 merupakan keluaran dari inverting oscilator amplifier. • Pin 20 Ground sumber tegangan yang diberi simbol GND. • Pin 21 sampai 28 Saluran/bus I/O 8 bit dua arah dengan internal pull-ups. Saat pengambilan data dari program memori eksternal atau selama mengakses data memori eksternal yang menggunakan alamat 16 bit (MOVX @ DPTR), port 2 berfungsi sebagai saluran/bus alamat tinggi (A8– A15). Sedangkan pada saat mengakses ke data memori eksternal yang menggunakan alamat 8 bit (MOVX @ R1), port 2 mengeluarkan isi dari P2 pada Special Function Register. • Pin 29 Program Store Enable (PSEN) merupakan sinyal pengontrol untuk mengakses program memori eksternal masuk ke dalam bus selama proses pemberian/pengambilan instruksi (fetching). • Pin 30 Address Latch Enable (ALE)/PROG merupakan penahan alamat memori eksternal (pada port 1) selama mengakses ke memori eksternal. Pena ini juga sebagai pulsa/sinyal masukkan pemograman • • • (PROG) selama proses pemograman. Pin 31 External Acses Enable (EA) merupakan sinyal kontrol untuk pembacaan memori program. Apabila diset rendah (L) maka mikrokontroler akan melaksanakan seluruh instruksi dari memori program eksternal, sedangkan apabila diset tinggi (H) maka mikrokontroler akan melaksanakan instruksi dari memori program internal ketika isi program counter kurang dari 4096. ini juga berfungsi sebagai tegangan pemograman (VPP = +12V) selama proses pemrograman. Pin 32 sampai 39 Pin ini adalah port 0 yang merupakan saluran/bus I/O 8 bit open colector, dapat juga digunakan sebagai multipleks bus alamat rendah dan bus data selama adanya akses ke memori program eksternal. Pada saat proses pemograman dan verifikasi port 0 digunakan sebagai saluran/bus data. External pull-ups diperlukan selama proses verifikasi. Pin 40 Sumber tegangan positif yang diberi simbol VCC. 2.5 Motor DC dan IC L293D Motor DC adalah motor yang biasa digunakan pada perangkat elektronika. Dalam hal ini motor digunakan untuk menggerakkan pintu dari shelter busway. Motor dapat berputar searah jarum jam (CW) dan lawan arah jarum jam (CCW). Konfigurasi motor dapat dilihat pada Gambar 2.7. . Gambar 2.7 Lambang Motor DC Motor driver merupakan suatu rangkaian yang mengatur kerja motor atau biasa dikatakan sebagai suatu rangkaian penggerak motor sehingga motor tersebut bekerja atau beroperasi sesuai dengan apa yang kita kehendaki. Pada saat motor ini beroperasi atau bekerja biasanya terjadi induksi yang mengakibatkan tegangan menjadi sangat tinggi, sehingga diperlukan suatu rangkaian motor driver yang mengatur motor agar pada saat motor tersebut beroperasi dia tidak akan mengakibatkan gangguan kepada rangkaian-rangkaian lain yang berhubungan dengan motor. Gambar 2.8 memperlihatkan IC L293D yang merupakan rangkaian penyangga (Buffer) pada system digital yang dapat mempertahankan jumlah tegangan maupun arus sehingga dapat menggerakkan motor DC dengan stabil tanpa mempengaruhi rangkaian lainnya. Untuk menggunakan tujuh ruas Common Anoda, decoder yang harus digunakan adalah decoder bersifat aktif low. Namun pada alat pendeteksi jarak ini penulis menggunakan mikrokontroler AT89S51, dimana mikrokontroller ini bersifat aktif low baik masukan maupun keluarannya. Resistor digunakan sebagai pembatas arus yang melewati LED pada ruas, dimana standar arus pada LED bernilai 10mA sampai 20mA. 2.7 IC 74LS47 (BCD to Seven Segment Decoder) BCD (Binary Coded Decimal) to seven segment merupakan sebuah decoder yang dapat mengubah kode biner menjadi tampilan angka pada seven segment. Gambar 2.11 memperlihatkan konfigurasi pin IC74LS47. Gambar 2.8 IC L293D 2.6 Seven Segment Penampil seven-segment merupakan sekumpulan LED yang disusun sedemikian rupa. Sehingga dengan menyalanya LED akan membentuk angka desimal yang dikehendaki. Sebuah seven-segment dapat menampilkan bilangan desimal 0 sampai 9 atau suatu abjad. Bentuk tampilan seven-segment dapat dilihat pada Gambar 2.9. Gambar 2.11 Konfigurasi Pin IC 74LS47 Gambar 2.9 Seven Segment Seven-segment yang digunakan berjenis CA (Common Anoda). Penampil tujuh ruas ini merupakan tujuh buah LED, dimana anoda dari LED terhubung ke Vcc atau “High” dan katoda dihubungkan ke decoder, seperti diperlihatkan Gambar 2.10. Gambar 2.10 Seven Segment Common Anoda 2.8 Motor Stepper Tidak seperti motor DC konvensional yang berputar secara terus-menerus (Continue), perputaran motor stepper adalah secara langkah per langkah (step by step). Gerakan motor stepper sesuai dengan pulsa-pulsa digital yang diberikan. Seperti halnya motor konvensional DC biasa, motor stepper juga dapat berputar dalam dua arah yaitu searah jarum jam (CW) atau berlawanan arah jarum jam (CCW) yaitu dengan memberikan polaritas yang berbeda . Kecepatan motor stepper pada dasarnya ditentukan oleh kecepatan pemberian data pada komutatornya. Semakin cepat data yang diberikan maka motor stepper akan semakin cepat pula berputarnya. Pada kebanyakan motor stepper kecepatannya dapat diatur dalam daerah frekuensi audio dan akan menghasilkan putaran yang cukup cepat. Untuk mengatur gerakan motor per langkahnya dapat dilakukan dengan dua cara berdasarkan simpangan sudut gerakannya yaitu full step dan half step. Pada Tabel 2.1 dapat dilihat contoh dari pergerakan full step pada motor stepper. Tabel 2.1 Motor Stepper Dengan Gerakan Full Step Step S3 S2 S1 S0 1 0 0 0 1 2 0 0 1 0 3 0 1 0 0 4 1 0 0 0 1 0 0 0 1 Pada Tabel 2.2 dapat dilihat contoh dari pergerakan half step pada motor stepper. daya dc ini dapat dibangun dengan menggunakan trafo step down, dioda penyearah dan kapasitor. 2.10.1 Transformator ( Trafo ) Step Down Trafo ini akan menurunkan tegangan PLN menjadi lebih kecil, sesuai dengan perbandingan jumlah lilitannya. Simbol Trafo dapat dilihat pada Gambar 2.12. Primer Sekunder Gambar 2.12 Simbol Transformator (Trafo) Tabel 2.2 Motor Stepper Dengan Gerakan Half Step Step S3 S2 S1 S0 1 0 0 0 1 2 0 0 1 1 3 0 1 0 0 4 0 1 1 0 5 0 1 0 0 6 1 1 0 0 7 1 0 0 0 8 1 0 0 1 1 0 0 0 1 Sama halnya dengan motor DC, motor stepper juga memerlukan suatu rangkaian penggerak motor (motor driver) yang mengatur motor agar pada saat motor tersebut beroperasi dia tidak akan mengakibatkan gangguan kepada rangkaianrangkaian lain yang berhubungan dengan motor. 2.9 Saklar Push Button dan Mikro Switch Saklar push button dan mikro switch merupakan komponen elektronika yang berfungsi sebagai pengkondisi on atau off suatu rangkaian, atau merupakan komponen yang berfungsi untuk penghubung atau pemutus suatu rangkaian dengan rangkaian lain. 2.10 Catu Daya Catu daya digunakan sebagai suplai tegangan pada beberapa rangkaian elektronika. Catu Dimana : η = Efisiensi transformator Np = Jumlah lilitan primer NS = Jumlah lilitan sekunder Vp = Tegangan Primer Vs = Tegangan sekunder Ip = Arus lilitan primer Is = Arus lilitan sekunder 2.10.2 Dioda Sebagai Penyearah Dioda penyearah berfungsi untuk merubah tegangan bolak-balik (AC) menjadi tegangan searah (DC). Dioda digunakan sebagai penyearah gelombang penuh. Selama setengah siklus positif tegangan sekunder, Tegangan positif phasa yang pertama diteruskan oleh D1 sedangkan phasa yang berikutnya dilewatkan melalui D2 ke beban R1 dengan CT transformator sebagai common ground.. Dengan demikian beban R1 mendapat supply tegangan gelombang penuh seperti Gambar 2.13. Walaupun terlihat di sini tegangan ripple dari kedua rangkaian di atas masih sangat besar. Gambar 2.13 Rangkaian Penyearah Gelombang Penuh 2.10.3 Kapasitor Sebagai Filter Untuk menghaluskan ripple pada keluaran diode, maka digunakan kapasitor. Kapasitor berfungsi sebagai filter, yang dimaksud disini adalah menghaluskan tegangan yang berbentuk pulsa-pulsa pada tahanan R1, sehingga dihasilkan tegangan yang lebih rata. Rangkaian filter dapat dilihat pada Gambar 2.14. D1 C1 R CT D2 Gambar 2.15 Tegangan Keluaran Setelah Melewati Filter Keterangan : t1 - t2 = Waktu untuk mengosongkan muatan t2 - t3 = Waktu untuk mengisi muatan Gambar 2.14 Rangkaian Filter Kapasitor Pada saat D1 berada pada bias forward (pada setengah siklus positif), dan pada saat D2 dibias forward (pada setengah siklus negatif), maka kapasitor akan mengisi muatan sampai penuh dengan; VCP = Vs ( 1 – e –t/RC) Dimana : VCP = Tegangan kapasitor saat pengisian Vs = Tegangan sumber t = Waktu untuk mengisi muatan kapasitor sampai penuh RC = Konstanta waktu rangkaian 3. PERANCANGAN ALAT Dalam perancangan otomatisasi pintu pada shelter busway dengan mikrokontroler AT89S51, terbagi atas perancangan bentuk fisik alat (miniatur) dan perancangan elektronik. 3.1 Perancangan Bentuk Fisik Alat (Miniatur) Sebelum melakukan perancangan elektronik, memikirkan bentuk fisik alat dapat membantu memberi gambaran tentang perancangan elektroniknya. Seperti aplikasi apa saja yang akan diterapkan pada alat yang akan dirancang. Sedangkan pada saat tegangan pulsa turun menjadi lebih rendah dari VCP, maka dioda akan reverse, kapasitor akan mengosongkan muatannya melalui R1, sehingga tegangan kapasitor akan jatuh secara eksponensial menjadi; VL = Vs e – t/RC Dimana : VL = Tegangan kapasitor saat pengosongan muatan Vs = Tegangan sumber t = Waktu untuk mengisi muatan kapasitor sampai penuh RC = Konstanta waktu rangkaian Gambar 3.1 Bentuk Fisik Alat (Miniatur) Pada bagian pintu shelter terdapat tiga buah mikro switch (MS.1, MS.2, MS.3). Mikro switch berfungsi sebagai saklar terhadap motor 1. Untuk lebih jelasnya, cara kerja dari pintu shelter dapat dilihat pada Gambar 3.2. Proses ini akan terjadi secara continue. Beda antara VCP dan VCL disebut dengan tegangan ripple kapasitor ( Vr ) seperti terlihat pada Gambar 2.15. Gambar 3.2 Pintu Shelter Busway Motor 1 berfungsi sebagai penggerak pintu. Pintu shelter akan membuka sampai pintu memicu MS.1. Begitu pula pada saat menutup, pintu shelter akan menutup sampai pintu memicu MS.2. Pada bagian dalam pintu terdapat MS.3 yang berfungsi sebagai pengaman. Apabila ada yang menghalangi saat pintu menutup hingga memicu MS.3, pintu akan kembali terbuka sampai waktu yang telah ditentukan. 3.2 Perancangan Elektronik Pembuatan alat palang pintu otomatis untuk shelter busway dengan mikrokontroler AT89S51 terdiri dari beberapa buah blok rangkaian yang memiliki fungsi dan cara kerjanya masing-masing. Interaksi dari blok-blok rangkaian tersebut dalam membentuk fungsi masukan terhadap keluaranya diperlihatkan pada Gambar 3.3 Gambar 3.3 Blok Rangkaian Adapun komponen yang digunakan pada tiap– tiap blok rangkaian akan dijelaskan dari sub bab ini. Gambar 3.4 memperlihatkan rangkaian keseluruhan dari alat yang dibuat. Gambar 3.4 Rangkaian Keseluruhan 3.2.1 Blok Catu Daya Pada blok rangkaian catu daya digunakan IC 7812 dan IC7805. IC ini mempunyai karakeristik diantaranya sebagai berikut : 1. Tegangan keluarannya 7805 adalah 4,8 V sampai 5,2 V 2. Tegangan keluarannya 7812 adalah 11,8 V sampai 12,2 V 3. Arus keluarannya adalah 5 mA sampai 1A Rangkaian ini disebut sebagai rangkaian catu daya atau biasa disebut sebagai power regulator. Jenis rangkaian power regulator tersebut adalah rangkaian rectifer dua fase. Tegangan DC yang dihasilkan adalah tegangan DC 12Volt (fan) dan tegangan DC 5 Volt (mikrokontroler AT89S51, indikator LED, inframerah, seven-segment, motor DC dan motor stepper). 3.2.2 Blok Sensor Rangkaian sensor merupakan alat yang berfungsi sebagai pendeteksi adanya busway yang datang. Ketika ada busway yang dan berhenti, maka akan terdeteksi oleh sensor, dan sensor akan memberikan data masukkan pada mikrokontroler untuk diproses. Untuk menghasilkan pancaran sinar inframerah, tegangan yang digunakan yaitu sebesar 5 Volt. Karena arus maksimum pada LED inframerah sebesar 60 mA, maka berdasarkan perhitungan, untuk menghindari kerusakan akibat kelebihan arus pada LED inframerah dapat menggunakan resistansi sebesar 100Ω. R= V I = 5 = 83,33Ω 60mA Dengan nilai resistansi minimal 83,33Ω maka untuk lebih aman menggunakan resistansi sebesar 100Ω. Rangkaian sensor yang digunakan dalam perancangan alat ini ditunjukkan pada Gambar 3.6. Prinsip kerja dari sensor tersebut yaitu apabila photodioda mendapatkan cahaya inframerah yang dipantulkan dari pemancar inframerah maka kondisi photodioda menjadi saturasi. photodioda diasumsikan sebagai saklar, sehingga keadaan antara anoda-katoda seakan-akan terhubung pada saat menerima cahaya dari LED inframerah, sehingga tegangan yang dihasilkan antara anoda-katoda sebesar 0V karena langsung terhubung ke ground. Sehingga masukan pada kaki 5 dan kaki 7 (terminal positif) pada Op-Amp LM339 mendapatkan masukan 0V yang menyebabkan mikrokontroler akan aktif. 3.2.3 Blok Kendali Mikrokontroler Blok mikrokontroler ini berfungsi sebagai pengatur kerja alat agar dapat bekerja secara sistematis. Hasil keluaran dari blok sensor dikirim ke mikrokontroler untuk diproses. Setelah proses, mikrokontroler mengirimkan data ke blok keluaran untuk mengaktifkan blok keluaran tersebut. Pada perancangan ini, Port yang diperlukan adalah Port.0 (P0), Port.1 (P1), Port.2 (P2) dan Port.3 (P3). Semua aplikasi yang menggunakan Port ini adalah aktif low (0 V) sehingga komponen yang terhubung pada Port disesuaikan fungsi masukan maupun keluarannya. IC Mikrokontroller AT89S51 ini adalah komponen inti pada blok kendali yang dihubungkan dengan komponen seperti kapasitor, resistor dan saklar push-button sebagai reset, serta X-Tal 12 MHz dan dua kapasitor non polar 30 pF sebagai osilator. 3.2.4 Indikator LED Indikator LED yang ada pada P3.0 dan P3.1 digunakan sebagai indikator yang ditujukan pada pengemudi busway. Indikator LED merah pada P3.0 menyala dan memberi tanda supaya busway berhenti dan waktu pemberhentian aktif. Bila waktu pemberhentian telah selesai menghitung, indikator LED hijau pada P3.1 menyala, dan memberi tanda pada pengemudi busway untuk jalan kembali. Rangkaian Indikator LED yang digunakan dalam perancangan alat ini ditunjukkan pada Gambar 3.6. 5V 100 P 3.0 LED P 3.1 100 Gambar 3.5 Rangkaian Sensor A T 8 9 S 5 1 Gambar 3.6 Rangkaian Indikator LED 3.2.5 Motor Stepper Pada perancangan alat ini digunakan motor stepper sebagai simulasi dari palang pintu pada jalur busway. Motor stepper yang digunakan ini adalah jenis bi-polar dimana untuk menggerakkan perlangkahnya dibutuhkan tegangan, dengan kata lain motor stepper tersebut aktif high. Tegangan tersebut dihasilkan dari keluaran mikrokontroller pada Port 2.4 sampai Port 2.7. Data yang diberikan untuk menggerakkan motor stepper searah jarum jam dapat dilihat pada Tabel 3.1. Tabel 3.3 Konversi Data Seven-Segmen pada IC 74LS47 Tabel 3.1 Data Masukan Untuk Memutar Motor Stepper Searah Jarum Jam 4. ANALISA ALAT Dengan melakukan uji coba pada alat bertujuan untuk mengetahui apakah alat ini berfungsi atau tidak. Dengan memberikan data high (1) pada masing–masing masukan motor stepper, berarti setiap pin masukan motor mendapatkan tegangan sebesar 5 V. Untuk memutar balik arah putaran motor stepper menjadi berlawanan arah jarum jam hanya membalik data masukan yaitu data a, data b, data c dan data d ditukar posisinya menjadi data d, data c, data b dan data a. Seperti contoh pada Tabel 3.2. Tabel 3.2 Data Masukan Untuk Membalik Arah Putaran Motor Stepper 3.2.6 Seven Segment Dan IC 74LS47 (BCD to Seven Segment Decoder) Port.0 mikrokontroler dihubungkan dengan penampil elektronik yang menggunakan sevensegment. Seven-segment yang digunakan adalah seven-segment Common Anoda. Untuk menghemat penggunaan Port pada mikrokontroler, maka digunakan IC 74LS47. IC jenis ini berfungsi sebagai dekoder data biner menjadi data desimal dan cocok dengan seven-segment CA (common anoda). Konversi data seven-segment yang digunakan dalam IC 74LS47 dapat dilihat pada Tabel 3.3. 4.1 Uji Coba Rangkaian Catu Daya Gambar 4.1. Titik Uji Rangkaian Catu Daya Hasil Pengujian Hasil uji Titik A dengan alat ukur Oscilloscope dapat dilihat pada Gambar 4.2. 5 Volt/Div Time/Div = 5 ms , Perioda (T) = 4/Div Gambar 4.2 Bentuk Gelombang Titik A (Output Dari Trafo) Analisa Hasil pengujian : Pada Titik A (output dari trafo) bentuk gelombang masih berupa gelombang AC. Berdasarkan Gambar 4.2 didapatkan pengukuran frekuensi sebesar 50 Hz, didapat dari persamaan berikut : f = 1 1 1 = = x10 3 = 50 Hz −3 T 4 x5.10 20 Hasil uji Titik B dengan alat ukur Oscilloscope dapat dilihat pada Gambar 4.3. 5 Volt/Div , Time/Div = 2 ms Gambar 4.5 Bentuk Gelombang Titik D (Setelah Melewati Kapasitor Dan IC 7805) 0.1Volt/Div , Time/Div = 5 ms Gambar 4.3 Bentuk Gelombang Titik B (Setelah Melewati Dioda) Analisa Hasil pengujian : Berdasarkan Gambar 4.3, pada Titik B (setelah melewati dioda) bentuk gelombang hanya menapilkan ripple dari setengah siklus positif. Ini dikarenakan fungsi dari kedua dioda sebagai penyearah setengah gelombang, yang hanya melewatkan tegangan positif dari keluaran trafo. Analisa Hasil pengujian : Pada Titik D juga terlihat berkurangnya riak atau ripple pada bentuk gelombangnya. Besarnya tegangan puncak dari IC 7805 sebesar + 5 Volt. Hasil uji pengukuran tegangan pada Titik C dan Titik D dengan menggunakan multimeter digital terdapat pada Tabel 4.1. Tabel 4.1 Hasil Uji Pengukuran Rangkaian Catu Daya Hasil uji pada Titik C dengan menggunakan oscilloscope dapat dilihat pada Gambar 4.4. 4.2 Uji Coba Rangkaian Sensor Percobaan ini dilakukan pada saat keadaan sensor tidak terhalang, dimana pada saat photodioda tidak menerima pancaran sinar dari LED inframerah. Titik uji dari rangkaian sensor dapat dilihat pada Gambar 4.6. 5 Volt/Div , Time/Div = 2 ms Gambar 4.4 Bentuk Gelombang Titik C (Setelah Melewati Kapasitor Dan IC 7812) Analisa Hasil pengujian : Pada titik C setelah melewati kapasitor dan IC 7812 riak atau ripple terlihat berkurang, ini dikarenakan adanya kapasitor, dimana kapasitor disini berfungsi sebagai filter yang akan memperlemah ripple, dan kapasitor tersebut juga berfungsi untuk memastikan tegangan keluaran akan tetap berada atau mendekati tegangan puncak dari IC 7812 yaitu sebesar 12 Volt. Hasil uji pada Titik D dengan menggunakan oscilloscope dapat dilihat pada Gambar 4.5. Gambar 4.6 Titik Uji Rangkaian Sensor Hasil Pengujian Hasil pengujian masing-masing titik dapat dilihat pada Tabel 4.2. Tabel 4.2 Hasil Uji Sensor Pada Saat Tidak Terhalang Terhadap Resistansi Trimpot Analisa Hasil pengujian : Berdasarkan Tabel 4.2, Sensor masih dapat bekerja apabila besar resistansi maksimal dari trimpot adalah sebesar 4 kΩ. Jika resistansi lebih besar dari 4 kΩ, tegangan terminal negatif pada Op-Amp akan lebih besar dibandingkan dengan tegangan terminal positif-nya, sehingga Op-Amp menghasilkan tegangan keluaran sebesar 0,23Volt, sama halnya pada saat sensor terhalang. Hasil Pengujian Tabel 4.3 Hasil Uji Tegangan Push Button Dan Mikro Switch Sebagai Masukan 4.3 Uji Coba Rangkaian Saklar Push Button Dan Mikro Switch Gambar 4.7 Titik Uji Rangkaian Push Button Dan Mikro Switch Analisa Hasil pengujian : Berdasarkan Tabel 4.3, rangkaian mikrokontroler akan bekerja jika diberi tegangan 0 Volt (terhubung dengan ground). Saklar push button dan mikro switch akan mengaktifkan mikrokontroler jika dihubungkan dengan ground, tetapi masukan tegangan 4,93V tidak akan menghasilkan keluaran pada mikrokontroler. 1.4 Uji Coba Rangkaian Motor DC Hasil Pengujian 5V Manual1 P1.2 P1.3 Tabel 4.5 Hasil Uji Tegangan Yang Terukur Untuk Mengaktifkan Motor Stepper Titik Uji 5V Manual2 Motor DC P2.1 P2.0 In 1 In 2 m1 L293D AT89S51 Out 1 Out 2 Gambar 4.8 Titik Uji Rangkaian Motor DC Hasil Pengujian Tabel 4.4 Hasil Uji Tegangan Yang Terukur Untuk Mengaktifkan Motor DC Analisa Hasil Pengujian : Motor DC yang digunakan dalam pembuatan alat ini adalah jenis motor DC dengan dua polaritas, dimana untuk mengaktifkan koilnya yang melalui driver IC L293D dibutuhkan tegangan sebesar 5 V dan 0 V. Tegangan sebesar 5 V dan 0 V ini dihasilkan dari keluaran pengendali mikrokontroler yaitu pada Port 2.0 dan Port 2.1 yang telah disesuaikan dengan program. Hasil pengukuran yang didapat terlihat pada Tabel 4.4. Analisa Hasil Pengujian: Motor stepper akan berputar pada saat mikrokontroler mendapat tegangan low (0.04V) dari tombol manual. Motor stepper bergerak dua arah (CW dan CCW). 4.6 Uji Coba Kinerja Alat Pada pengujian kinerja alat dilakukan simulasi untuk mengetahui rata-rata waktu yang diperlukan dalam satu kali pemberhentian untuk mengangkut dan menurunkan penumpang. Hasil Pengujian Tabel 4.6 Hasil Uji Terhadap Kinerja Alat Dalam Satu Kali Pemberhentian 4.5 Uji Coba Rangkaian Mottor Stepper 5V Manual3 Manual4 P1.4 P1.5 Titik Uji 5V AT89S51 P2.7 P2.6 P2.5 P2.4 L293D In 1 In 2 In 3 In 4 Motor Stepper Out 1 Out 2 Out 3 Out 4 a b c m2 d Gambar 4.9 Titik Uji Rangkaian Motor Stepper Analisa Hasil Pengujian : Jadi waktu rata-rata untuk satu kali pemberhentian bus = Σ Waktu Total = 490.6 = 49.06 detik n 10 5. PENUTUP 5.1 Kesimpulan 1. Pintu shelter akan terbuka apabila sensor 1 terhalang + 5 detik, dan akan menutup kembali setelah 30 detik. 2. Jika ada yang menghalagi pintu shelter (terjepit) pada saat pintu sedang menutup, pintu shelter akan terbuka kembali, dan pintu shelter akan menutup kembali setelah 3 detik. 3. Palang pintu pada jalur busway akan terbuka pada saat busway melintasi sensor 2, dan akan menutup kembali setelah 10 detik. 4. Waktu untuk satu kali pemberhentian bus + 1 menit. 5. Jarak maksimal sensor untuk mendeteksi adanya bus sejauh ± 1 meter. 5.2 Saran Dari segi keamanan untuk lebih baiknya alat ini dilengkapi dengan pendeteksi kerusakan misalnya kerusakan pada sensor, pengendali mikrokontroler dan palang pintu. Jika ada kerusakan maka pendeteksi akan mengirimkan informasi berupa indikator LED atau alarm kepada operator shelter, sehingga kerusakan alat dapat langsung diperbaiki. Kemudian hal yang sangat penting adalah perlu adanya suatu perawatan berkala terhadap alat, agar alat dapat beroperasi dengan baik. DAFTAR PUSTAKA Boylestad, Robert. Nashelsky, Louis. “Electronic Devices and Circuit Theory, Prentice Hall International”, New Jersey, 1992. Budiharo, Widodo. “Perancangan Sistem dan Aplikasi Mikrokontroler”, Penerbit Elex Media Komputindo”, Jakarta, 2005. Eko Putra, Agfianto. “Belajar Mikrokontroler AT89C51/52/55 (Teori dan Aplikasi)”, Gava Media, Yogyakarta, 2005. Hughes, Fredrick W. “Panduan Op - Amp, Elex Media Komputindo”, Jakarta, 1990. Malvino dan Hanapi Gunawan Diktat Kuliah, “Prinsip-Prinsip Elektronik”, Edisi Kedua. Jakarta : PT. Gelora Aksara Pratama 1981. Soeparlan, Soepono. Yahdi, Umar. “Teknik Rangkaian Listrik”, Jilid 1, Gunadarma, Depok, 1995. IC Datasheats, http://www.alldatasheets.com, Januari 2009 Atmel International, www.atmel.com, 2009 “AT89S51” datasheet,