rancang bangun sistem pengaman dan monitoring motor sinkron
advertisement

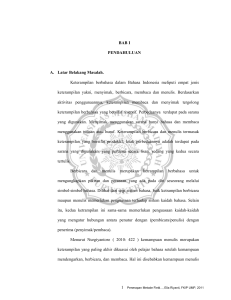
RANCANG BANGUN SISTEM PENGAMAN DAN MONITORING MOTOR SINKRON TIGA FASA ( SOFTWARE) Ir.Gigih Prabowo, MT.1 , Ir.Era Purwanto,M.Eng.2 , Ahya’ Ulumudin 3 1 Dosen Jurusan Teknik Elektro Industri 2 Dosen Jurusan Teknik Elektro Industri 3 Mahasiswa D3 Jurusan Teknik Elektro Industri Politeknik Elektronika Negeri Surabaya - ITS Kampus ITS Sukolilo Surabaya 60111 Email : [email protected] Abstrak Motor sinkron tiga fasa merupakan salah satu mesin listrik yang banyak digunakan di dunia industri. Motor ini bekerja pada kecepatan yang konstan sesuai tegangan dan frekuensinya. Selain itu motor sinkron dapat di fungsikan untuk memperbaiki faktor daya. Karena fungsi serta kelebihan pada motor sinkron, maka motor tersebut di haruskan bekerja dengan baik dan aman sesuai dengan fungsinya. Namun, banyak jenis gangguan yang berpotensi untuk mengagalkan fungsi kerja motor atau bahkan merusak motor itu sendiri. Gangguan tersebut, diantaranya yaitu: tegangan lebih, tegangan kurang, arus lebih, beban lebih, tegangan fasa hilang, kecepatan lebih dan panas lebih. Sistem pengamanan dan monitoring motor sinkron dirancang untuk mengamankan motor sinkron dari gangguan tegangan lebih, tegangan kurang, tegangan fasa hilang, arus lebih, beban lebih, kecepatan lebih serta panas lebih. Fasilitas monitoring akan memudahkan dalam analisa keadaan motor sehingga langkah untuk perbaikan atau perawatan dapat di ambil dengan cepat dan tepat. Dengan adanya sistem pengamanan dan monitoring pada motor sinkron, motor nantinya akan terlindung dari gangguan serta dengan mudah dapat dianalisa agar kinerja motor sinkron lebih baik dan aman. Kata kunci : Motor sinkron, sensor, pengaman, monitoring. 1. Pendahuluan Motor sinkron tiga fasa merupakan salah satu mesin listrik yang banyak digunakan di dunia industri. Motor ini bekerja pada kecepatan yang konstan sesuai tegangan dan frekuensinya. Selain konstruksinya yang hampir sama dengan motor asinkron sehingga tidak terlalu memerlukan perawatan yang intensif, motor sinkron dapat difungsikan sebagai kondensator sinkron untuk perbaikan faktor daya. Karena fungsi serta kelebihannya, motor sinkron banyak diaplikasikan pada industri sebagai alat penggerak terutama pada plant yang membutuhkan kecepatan konstan atau sebagai pengkoreksi faktor daya. Sesuai dengan peran dan fungsinya, maka motor sinkron dinilai sangat penting dalam dunia industri. Sehingga motor sinkron diharuskan bekerja dengan baik dan aman dengan semestinya. Namun, banyak sekali jenis-jenis gangguan yang berpotensi untuk menggangu fungsi dan kerja motor atau bahkan merusak motor itu sendiri. Di antaranya yaitu: tegangan lebih, tegangan kurang, tegangan fasa hilang, arus lebih, beban lebih, kecepatan lebih dan panas lebih. Gangguan listrik yang terjadi dapat di sebabkan oleh banyak hal, untuk mengetahui penyebabnya harus di lakukan analisa terhadap nilai parameter listrik pada saat gangguan terjadi. Hal ini dilakukan dengan memonitoring parameter-parameter elektrik yang ada terlebih, sehingga penyebab terjadinya gangguan dapat di analisa dan langkah untuk perbaikan dapat di ambil dengan cepat dan tepat. Oleh karena itu, pengamanan motor akan dipadu dengan fasilitas monitoring sehingga sistem tersebut tidak hanya mengamankan, tetapi juga memudahkan dalam analisa keadaan kerja motor. 2. Tujuan khusus dari proyek akhir ini adalah untuk merancang dan membangun sistem pengamanan dan monitoring besaran motor sinkron sehingga motor tersebut diharapkan dapat bekerja dengan baik dan aman. 3. Batasan Masalah 4. 5. 6. 7. 8. 1 Jenis gangguan yang diamankan meliputi tegangan lebih, tegangan kurang, tegangan fasa hilang, arus lebih, beban lebih, kecepatan lebih dan panas lebih . Standart yang di gunakan dalam sistem pengaman motor ini adalah standart NEMA dan IEEE. Faktor daya yang di tampilkan hanya status apakah faktor daya motor bernilai leading atau lagging tanpa menampilkan nilainya. Nilai parameter nominal di inputkan melalui tombol navigasi. Apabila sistem mendeteksi adanya gangguan, maka kontaktor akan 9. 10. 11. 12. 13. 14. memutus sumber daya dari motor, alarm akan menyala, LCD dan PC akan memberi tanda peringatan adanya jenis gangguan, serta apabila gangguan telah hilang, untuk menyalakan motor starting harus dilakukan dari panel start. Antarmuka monitoring pada PC akan memuat parameter-parameter motor serta waktu penyimpanan data dan kondisi motor. Monitoring pada PC hanya dapat dilakukan ketika PC dalam keadaan hidup. Jenis mikrokontroler yang digunakan adalah AT-Mega 16 dan terhubung dengan PC melalui kabel serial RSS-232. Software pemrograman yang di pakai adalah CodeVision AVR 2.03 yang menggunakan bahasa pemrograman C, dan Visual studio 2008 yang menggunakan bahasa pemrograman C#. Aplikasi manajemen database menggunakan software PHP my Admin 5.1.37. Standart aman yang di gunakan adalah seperti pada tabel 1.1: dapat digambarkan dalam diagram blok sebagai berikut: Power supply PC Jenis Gangguan 1 2 3 4 5 Over Load Over current Over Voltage Under Voltage Over Heat 6 Phase Loss 7 Over Speed 4 Nilai Parameter Gangguan Iac>In Iac>In VOV > 110% Vn VUV < 90% Vn Based insulation class: A=105ºC, B=130ºC, F=155ºC V salah satu atau dua fasa = 0 SOS >110% Sn Input set point Alarm Sensor Suhu Sensor arus Lampu indikator mikrokontroler Sensor kecepatan Sensor tegangan pada tiap fase LCD Gambar 4.1. Blok diagram sistem pengaman dan monitoring motor sinkron tiga fasa 4.2 Sistem Mikrokontroler Mikrokontroler yang digunakan dalam sistem ini adalah Mikrokontroler ATmega16 dengan memori program internal 512 Kbyte. Mikrokontroler ATmega16 dipilih karena mempunyai ADC internal di dalam chip-nya dengan tingkat kestabilan yang cukup presisi, mempunyai compiler canggih dengan bahasa pemrograman tingkat tinggi yaitu bahasa C sehingga lebih memudahkan programmer. Selain itu juga karena mikrokontroler jenis ini memiliki memori, jumlah timer/counter, serta jumlah port yang cukup untuk digunakan dalam proyek akhir ini. Dengan mengunakan ATmega16 pengontrolan sistem di nilai akan lebih mudah. Tabel 1.1 Standart Aman Yang Digunakan No Motor sinkron 3 phase kontaktor Toleransi Waktu > 20 s ≤ 20 s - 4.3 Perencanaan Gangguan Pendeteksi Adanya Dalam proses kerja sistem pengaman dan monitoring motor sinkron tiga fasa ini, padadasarnya adalah membaca dan membandingkan parameter kerja motor sinkron tiga fasa dengan nilai parameter standart aman, serta mengirim data ke PC dan disimpan agar dapat diolah dalam bentuk informasi-informasi tertentu. Lebih lengkapnya, konsep kerja sistem ini adalah seperti pada flowchart berikut: - Perencanaan dan Pembuatan Perangkat Lunak 4.1 Konfigurasi Sistem Pada sistem pengaman dan monitoring motor sinkron tiga fasa ini, akan dirancang dan dibuat sedemikian rupa hingga sistem tersebut dapat mengamankan gangguan pada motor sinkron dan mengirim data nilai parameter ke PC agar nantinya memudahkan untuk tujuan analisa keadaan motor. Dalam hal ini erat kaitannya dengan sensorsensor, terutama sensor tegangan, sensor arus ,sensor kecepatan dan sensor suhu. Serta mikrokontroler AT-Mega 16 sebagai prosesor utamanya dan PC sebagai media monitoring datanya. Sehingga, secara keseluruhan sistem 2 dengan toleransi waktu standart. Jika kenaikan melebihi standart baik nilai besaran maupun nilai waktu maka relay akan membuka dan alarm akan menyala serta LCD dan PC akan menampilkan jenis dan parameter gangguan. START · · · · · · Inisialisasi I/O Baca set parameter nominal Baca nilai parameter kerja motor Hitung batas standart aman berdasarkan parameter nominal Kirim Data Ke PC Bandingkan Nilai Parameter kerja Dengan Nilai Parameter Standart Aman Nilai Tegangan < Nilai Batas tegangan kurang? Y A Y B 4.4 Perencanaan Program Pembacaan Parameter Motor ADC merupakan konversi nilai dari suatu parameter analog, menjadi nilai berupa data digital. Dalam proses kerjanya, sistem ini akan mengukur dan membandingkan parameterparameter kerja motor dengan standart pengamanan sehingga dapat mengindikasi jenis gangguan pada motor sinkron dan mengamankannya. Dengan aplikasi ADC pada mikrokontroler AT-Mega 16 yang mampu membaca besaran parameter tegangan DC 0-5 volt dengan 8 chanel yang mempunyai resolusi hingga 10 bit.. Maka pengukuran parameter kerja motor dapat di lakukan. ADC yang akan di gunakan adalah ADC 10 bit dengan referensi tegangan VCC 5 Volt DC. Untuk menghitung nilai parameter riil yang dibaca sensor, di gunakan rumus: 𝑉𝑠𝑠 𝑥1024 𝐴𝑉 = 𝑥 𝑅𝑎𝑡𝑖𝑜𝑠𝑠 (2.1) 𝑉𝑟𝑒𝑓𝑓 N Nilai Tegangan < Nilai Batas tegangan lebih? N Nilai Arus > Nilai batas aman arus? Y C Y D Y E N Nilai Suhu> Nilai Batas Aman Panas? N Nilai Kecepatan> Nilai Batas Aman Kecepatan Lebih? N A B C · · Delay 20 ms Phase loss (>10%Vn)? N Y Kenali Sebagai Gangguan Tegangan Lebih Kenali Sebagai Gangguan Tegangan Fasa Hilang D E Hitung Waktu Trip Aktifkan Timer dan mulai menghitung Waktu Trip<=20s? Dimana : AV = Nilai Parameter riil Vss = Tegangsn output sensor yang masuk pin ADC Vref = tegangan referensi yang dipilih Ratioss= Perbandingan nilai tegangan output sensor dengan nilai parameter riil N Y Kenali Sebagai Gangguan Tegangan Kurang Kenali Sebagai Gangguan Arus Lebih Kenali Sebagai Gangguan Beban Lebih Kenali Sebagai Gangguan Panas Lebih Kenali Sebagai Gangguan Kecepatan Lebih Kontaktor=1 Alarm=1 Tampilkan di LCD Kirim dan Tampilkan di PC 4.5 Perencanaan Program Pengguna (User Interface) STOP Gambar 4. 2. Flowchart system Antarmuka Antarmuka pengguna di buat dengan menggunakan software Visual Studio 2008 dengan bahasa pemrograman C#. Pada antarmuka ini, akan di tampilkan nilai parameter yang terbaca oleh sensor, keadaan motor, grafik parameter kerja motor, peringatan-peringatan, tabel data parameter kerja motor, data statistik mengenai parameter kerja motor, nilai parameter nominal motor, catatan-catatan dan lain-lain. Pada perencanaan software antarmuka, form windows di rancang dalam beberapa tab. Tab pertama atau general tab berisikan beberapa informasi yang memuat nilai parameter kerja motor meliputi: tegangan di masing-masing fasa, arus AC yang mengalir pada motor, kecepatan motor, serta suhu di kumparan strator. Selain itu nilai set nominal motor akan di tampilkan dan keadaan power faktornya juga akan dapat terbaca. Keadaan motor dan kondisi/kesimpulan dari keadaan motor juga akan dapat di lihat. Sensor akan mengukur nilai parameter kerja motor. Mikrokontroler input nilai parameter nominal menjadi batas toleransi standart aman berdasarkan standart paten NEMA dan IEEE. Nilai parameter kerja motor dan input nilai parameter nominal akan di kirim ke PC untuk di simpan dalam database. Ketika parameter kerja motor melampaui batas toleransi standart aman, hal tersebut akan di anggap sebagai gangguan dan mikrokontroler akan mengirim perintah agar alarm menyala dan kontaktor membuka kemudian LCD akan menampilkan nilai dan jenis parameter gangguan. Untuk tegangan kurang atau under voltage apabila terjadi, maka akan di filter apakah tegangan kurang tersebut berindikasi pada tegangan fasa hilang atau tidak. Khusus untuk gangguan arus lebih dan beban lebih, karena memiliki indikasi yang sama yaitu kenaikan arus maka ketika arus melebihi standart aman, mikrokontroler akan menghitung waktu sesuai 3 Gambar 4.3 Blok diagram sistem pengaman dan monitoring motor sinkron tiga fasa Gambar 4.6. Blok diagram sistem pengaman dan monitoring motor sinkron tiga fasa Pada pada tab kedua, akan di tampilkan performance history atau grafik nilai dari masingmasing parameter kerja motor. Serta, monitoring, yaitu proses perekaman data kedalam suatu database agar datanya dapat di lihat dan di analisa. Standart yang digunakan disini adalah standart EEEI dan standaart NEMA. 5 Pengujian Dan Analisa 5.1 Pengujian ADC Pengujian analog to digital converter (ADC) internal mikrokontroler ini bertujuan untuk mengetahui kinerja dari ADC dalam mengkonversi tegangan analog ke tegangan digital. Tegangan referensi (Vreff) yang digunakan adalah pada Pin Areff dimana tegangan sama dengan tegangan sumber dari mikrokontroler, yaitu sebesar 5 volt. Setting ADC menggunakan clock sebesar 1.000.000 Khz. Gambar 4.4. Blok diagram sistem pengaman dan monitoring motor sinkron tiga fasa Pada tab ketiga, akan di munculkan tabel data yang memuat nilai masing-masing parameter pada suatu waktu. Selain itu pengguna akan dapan mengetahui nilai statistik dari data misalnya nilai maksimal, nilai minimal, serta nilai rata-rata. Dalam tab ini juga akan di tampilkan sebuah kesimpulan atau saran mengenai keadaan motor. Tabel 5.1 Pengujian ADC Internal Teg. No 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 Gambar 4.5. Blok diagram sistem pengaman dan monitoring motor sinkron tiga fasa Pada tab keempat, pengguna dapat mencatat sesuatu ke dalam data base dan akan di tampilkan kembali catatannya berserta waktu pencatatannya. Hal ini dapat di manfaatkan untuk mengetahui apa tindakan atau kondisi motor pada suatu waktu dai operator satu ke operator lain ketika menjalankan software antarmuka dalam waktu yang tidak bersamaan. Input ADC (volt) 0,00 0,25 0,50 0,75 1,00 1,25 1,50 1,75 2,00 2,25 2,50 2,75 3,00 3,25 3,50 3,75 4,00 4,25 4,50 4,75 5,00 Output ADC (praktek) Output ADC (teori) Prosentase Error Dec. Teg. (volt) Dec. Teg. (vol t) Dec (%) Teg (%) 0 51 102 153 205 256 308 359 410 461 513 564 615 666 718 769 820 871 923 974 1024 0,00 0,24 0,49 0,74 1,00 1,25 1,50 1,75 2,00 2,25 2,50 2,75 3,00 3,25 3,50 3,75 4,00 4,25 4,50 4,75 4,99 0 51,2 102,5 153,6 204,8 256 307,2 358,4 409,6 460,8 512 563,2 614,4 665,6 716,8 768 819,2 870,4 921,5 972,8 1024 0,00 0,25 0,50 0,75 1,00 1,25 1,50 1,75 2,00 2,25 2,50 2,75 3,00 3,25 3,50 3,75 4,00 4,25 4,50 4,75 5,00 0 0,39 0,49 0,39 0,10 0,00 0,26 0,17 0,10 0,04 0,20 0,14 0,10 0,06 0,17 0,13 0,10 0,07 0,16 0,12 0,09 0,00 4,00 2,00 1,33 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,20 5.2 Pengujian Pengiriman data ke PC menggunakan Serial RS232 Pengujian ini bertujuan agar dapat diketahui bahwa perangkat transciever dan receiver RS232 bekerja dengan baik sehingga data dari 4 mikrokontroler dapat terkirim ke PC. Pengujian ini di lakukan dengan meghubungkan mikrokontroler dengan PC melalui koneksi RS232, sebelumnya mikrokontroler di program sehingga dapat mengirim sinyal data dari pin Tx. Untuk berhasil atau tidaknya pengiriman data, dapat di lihat di hyperterminal atau langsung melalui terminal pada CodeVision AVR. Pada data hasil pengujian diketahui bahwa tegangan trip pada sistem pengaman adalah diatas 110% dari set nominal tegangan. Adapun waktu trip yang sama pada setiap pengujian adalah dikarenakan adanya waktu untuk mengidentifikasi gangguan dalam program mikrokontrole 6.3 Pengujian Gangguan Tegangan Kurang Sama seperti pada pengujian respon sistem terhadap gangguan tegangan lebih, pada pengujian gangguan tegangan kurang dilakukan dengan beban resistor variable 3 fasa. Dalam pengujian, tegangan input dari regulator tegangan 3 fasa di turunkan hingga kurang dari nilai tegangan seting nominalnya. Kemudian sumber tegangan di koneksikan dengan beban, menggunakan magnetik kontaktor. Hal ini di lakukan untuk mengetahui respon sistem pengaman terhadap adanya tegangan lebih secara mendadak. Tabel 4.8 berikut akan memuat data pengujian sistem terhadap gangguan tegangan lebih. Gambar5.1 Pengujian pengiriman data ke PC 6 Pengujian Gangguan 6.1 Pengujian Gangguan Pada pengujian gangguan ini merupakan pengujian seluruh prinsip kerja sistem sistem pengaman dan monitoring motor sinkron 3 fasa apakah dapat bekerja sebagai mestinya atau tidak. Jenis–jenis gangguan yang dimankan yaitu tegangan lebih, tegangan kurang, arus lebih, beban lebih, panas lebih dan kecepatan lebih. Tabel 6.2 Data Pengujian Gangguan Tegangan Kurang 6.2 Pengujian Gangguan Tegangan Lebih Untuk menguji pengamanan sistem terhadap gangguan tegangan lebih pengujian dilakukan dengan beban resistor variable 3 fasa. Dalam pengujian, tegangan input dari regulator tegangan 3 fasa di naikkan hingga lebih dari nilai tegangan seting nominalnya. Kemudian sumber tegangan di koneksikan dengan beban, menggunakan magnetik kontaktor. Hal ini di lakukan untuk mengetahui respon sistem pengaman terhadap adanya tegangan lebih secara mendadak. Tabel 4.7 berikut akan memuat data pengujian sistem terhadap gangguan tegangan lebih. No Set Nomina l Tegang an (V) VLL Regul ator (V) Tegangan pada saat trip secara teori Tega ngan trip pada tampi lan LCD %Er ror Kondisi sistem 1 380 415 418 418 - Tidak Trip 2 380 420 418 421 0.71 Trip 3 380 425 418 422 0.95 Trip 4 350 380 385 385 - Tidak Trip 5 350 390 385 386 0.25 Trip 6 350 400 385 387 0.51 Trip 7 300 330 330 330 - Tidak Trip 8 300 331 330 331 0.30 Trip 9 300 380 330 332 0.60 Trip Tabel 6.1 Data Pengujian Gangguan Tegangan Lebih No . Set Nominal Tegangan (V) VLL Regulato r (V) Tegangan pada saat trip secara teori Tegan gan trip pada tampil an LCD %Erro r 1 380 415 418 415 - 2 3 380 380 420 425 418 418 421 422 0.71 0.95 4 350 380 385 380 - 5 6 350 350 390 400 385 385 386 387 0.25 0.51 7 300 330 330 330 - Pada data hasil pengujian diketahui bahwa tegangan trip pada sistem pengaman adalah dibawah 90% dari set nominal tegangan. Adapun waktu trip yang sama pada setiap pengujian adalah dikarenakan adanya waktu untuk mengidentifikasi gangguan dalam program mikrokontroler. Kondi si sistem Tidak Trip Trip Trip Tidak Trip Trip Trip Tidak Trip 6.4 Pengujian Gangguan Arus Lebih dan Beban Lebih Untuk menguji respon terhadap gangguan arus lebih dan beban lebih, maka arus yang mengalir melalui sensor harus di naikkan sehingga 5 melebihi arus nominalnya. Pengujian dilakukan dengan regulator 1 fasa yang terhubung dengan resistor variabel 1 fasa. Arus yang mengalir pada rangkaian penguji diatur terlebih dahulu tanpa menghubungkan sensor dengam sistem pengaman. setelah itu, arus nominal di pada sistem pengaman di atur lebih kecil dari arus yang mengalir pada beban. Kemudian untuk pengujian respon sistem pengaman, sensor di hubungkan dengan sistem pengaman menggunakan switch. Berikut adalah tabel data hasil pengujian respon sistem terhadap gangguan arus lebih dan beban lebih. Tabel 6.5 Data Pengujian Pengamanan suhu lebih Nilai Suhu Nilai Suhu Respon No Yang di Set Pengujian(˚C) Sistem (˚C) pengaman 1 29 28.5 Tidak Trip 2 29 30.58 Trip 3 40 39 Tidak Trip 4 40 41.5 Trip 5 45 46 Trip 6 45 43 Tidak Trip Tabel 6.3 Lebih Tabel 6.3 Data Pengujian gangguan arus lebih dan bebab lebih No Nilai Arus Rangkai an (A) Nilai Seting Arus Nominal (A) 1 5.5 3 2 3 4 5 5.25 5 4.5 4.25 3 3 3 3 Over Current Overload Overload Overload Overload 6 4 3 Overload Pengenalan Jenis Gangguan Wakt u Trip secara teori (s) Wakt u Trip secara prakte k (s) % Err or 18 18.6 3.33 20.68 24 38 55.85 108.3 9 21 24.7 39 57 1.54 2,91 2,63 2,05 110 1,48 Data Pengujian Gangguan Suhu Pada pengujian gangguan suhu lebih diketahui bahwa sistem akan melakukan tindakan pengamanan ketika suhu telah melebihi set point yang telah ditentukan. Pada data terdapat adanya selisih antara nilai suhu pengujian dengan nilai set suhu, dikarenakan ketika sistem mengamankan gangguan sensor suhu tetap mengukur nilai suhu yang naik. 6.6 Pengujian Gangguan Tegangan Fasa Hilang Pada pengujian gangguan fasa hilang, salah satu atau salah dua tegangan input tegangan yang diukur oleh sensor tegangan akan sengaja di hilangkan sehinnga fasa tersebut terbaca 0 volt oleh sensor tegangan. Berikut adalah tabel data hasil pengujian respon sistem terhadap tegangan fasa hilang. Kurva Waktu Tunda Pengamanan Waktu (S) 120 Kenaikan Arus 100 108,39 80 60 40 55,85 20 38 24 20,68 18 0 4 4,25 4,5 5 5,25 5,5 Arus R (Ampere) Gambar 13 Grafik Tundaan Waktu Tabel 6.6 Data Pengujian Gangguan Fasa Hilang Fasa Yang dilepas dalam Respon Sistem No pengujian pengaman 1 R Trip 2 R dan S Trip 3 S Trip 4 S dan T Trip 5 T Trip 6 T dan R Trip 7 R, S dan T Standby Pada pengujian sistem pengaman terhadap gangguan tegangan fasa hilang, didapat data bahwa sistem akan mengamankan gangguan ketika terdapat salah satu atau dua fasa yang tegangannya hilang atau sama dengan nol. Namun ketika ketiga fasa dilepas sistem pengaman menganggap hal tersebut bukan sebagai gangguan sehingga sistem pengaman akan standby dengan kondisi kontaktor yang open. Dari table diatas dapat dilihat bahwa semakin besar arus yang lewat dan melebihi setting point, maka semakin cepat pula tundaan waktu yang terjadi. Untuk lebih jelasnya dapat dilihat pada tampilan grafik dibawah ini. 6.5 Pengujian Gangguan temperatur Lebih. Pengujian suhu lebih di lakukan untuk memperoleh respon sistem terhadap gangguan panas lebih pada motor sinkron. Pada pengujian, sensor suhu akan di panaskan hingga suhunya melebihi nilai nominal suhu yang diperbolehkan yang mana sebelumnya telah diinputkan melalui program. Berikut adalah tabel dat hasil pengujian respon sistem pengaman terhadap gangguan suhu lebih. 6.7 Pengujian kecepatan lebih Pada pengujian kecepatan lebih digunakan inverter 3 fasa untuk mengatur kecepatan motor 6 sinkron 3 fasa. Sebelum diuji kecepatan nominal diset terlebih dahulu. setelah itu motor dinyalakan dan diatur hingga melebihi kecepatan nominal yang telah diset, setelah itu dicatat nilai kecepatan yang terbaca ketika kondisi kontaktor open (trip). Berikut tabel data pengujian respon sistem pengaman terhadap gangguan kecepatn lebih. diindiksikan dari turunnya tegangan salah dua fasa hingga kurang dari 10% tegangan nominal. Sedangkan pada pengujian pengaman panas lebih diperoleh bahwa sistem akan mendeteksi gangguan panas lebih ketika suhu motor diatas set nominal. 8 Tabel 6.6 Data Pengujian kecepatan lebih Daftar Pustaka 1. No Nilai seting kecepatan (RPM) Nilai Kecepatan Motor saat Trip (RPM) Nilai kecepatan motor saat trip secara teori (RPM) 1 2 3 4 5 1000 1100 1200 1300 1400 1113 1231 1353 1476 1572 1100 1210 1320 1430 1540 % Error 1.18 1.73 2.5 3.21 2.07 Makalah motor sinkron VEDC-ITS di akses dari www.luqman96.files.wordpress.com pada 19 januari 2011. 2. Stephen J. Chapman, electric machinery fundamentals : fourth edition. Singapore, Mc Graw Hill, 2005. 3. Indhana Sudiharto, ST, MT. “ Sistem Pengaman Tenaga Listrik “, EEPIS, Surabaya, 2009 4. www.alldatasheet.com. ATMEGA 16. Diakses pada tanggal 14 januari 2011. 5. www.allegromicro.com. ACS706ELC20A-DS, Rev. 1 Diakses pada tanggal 15 januari 2011. 6. Aji Saka D.R, “Rancang Bangun Sistem Pengaman Teegangan Dan Frekuensi Dilengkapi Dengan Sistem Monitoring (Hardware)”, PENS-ITS, 2008. 7. Zuhal.”DASAR TENAGA LISTRIK”,ITB Bandung,1997. 8. Optocoupler. Diakses dari www.wizhoe'sblogs.htm. Pada 26 januari 2011. 9. Mikrokontroler dan LCD diakses dari www.juraganelektro.com pada 25 januari 2011. 10. Sensor suhu diakses dari www.dunia-listrik.blogspot.com pada 25 januari 2011. Dari data pengujian respon sistem pengaman terhadap gangguan kecepata lebih, diketahui bahwa sistem akan mengamankan motor ketika kecepatan motor melebihi sekitar 110% dari kecepatan setting. Pada data diatas nilai kecepatan motor saat trip tidak tepat 110 % dari kecepatan seting. Hal ini dikarenakan setelah kontaktor trip motor tetap berputar sedikit lebih cepat walaupun kontaktor telah trip karena masih ada gaya setrifugal pada motor sinkron 3 fasa. 7 Kesimpulan Setelah melalui beberapa proses dalam pengerjaan proyek akhir ini secara keseluruhan, maka dapat disimpulkan sebagai berikut: Sistem ini mengamankan gangguan tegangan lebih, tegangan kurang, tegangan fasa hilang, arus lebih, beban lebih, kecepatan lebih dan panas lebih pada motor sinkron, namun setiap gangguan terkecuali gangguan arus lebih dan beban lebih tidak memiliki toleransi waktu. Pada pengujian arus lebih dan beban lebih didapatkan % error rata-rata ketepatan waktu trip 2,32 %. Pada pengujian pengaman tegangan lebih dan tegangan kurang diperoleh perbedaan antara tegangan teori saat trip dengan tampilan tegangan trip diLCD dengan % error rata-rata 0,55 % dan 2.32%. Untuk pengujian pengaman kecepatan lebih diperoleh perbedaan antara teori kecepatan saat trip dengan tampilan kecepatan trip diLCD dengan % error rata-rata 2.138%. Dari pengujian tegangan fasa hilang diperoleh bahwa fasa yang hilang 7