BAB II LANDASAN TEORI
advertisement

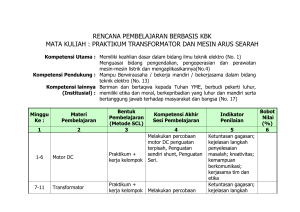
BAB II LANDASAN TEORI 2.1 Umum Panel Inverter adalah peralatan untuk mengubah frekuensi dan tegangan untuk dapat mengontrol motor AC sangat diperlukan terutama oleh perusahaan yang banyak mempergunakan motor AC untuk menggerakkan mesin produksi. Karena motor AC memiliki banyak keunggulan dibanding motor DC yaitu dari kemudahan pemeliharaan, tenaga yang dihasilkan, biaya perbaikan dan lain-lain. Motor AC memiliki kelemahan yaitu kecepatan putaran mesinnya tergantung pada frekuensi masukan, sebagai contoh di Indonesia frekuensi yang tersedia adalah 50 Hz dan bersifat tetap maka kecepatan putar motor AC akan bersifat tetap, padahal agar diperoleh hasil putaran yang sesuai dengan keinginan maka motor AC harus dapat diatur kecepatannya. Disinilah diperlukan peralatan pengubah frekuensi, salah satu peralatan pengubah frekuensi adalah inverter. Pada bab ini akan diuraikan satu persatu komponen yang menyusun dan membantu kerja inverter dalam mengontrol motor AC. 2.2 Teori Pendukung 2.2.1 Sistem Tiga Fasa Hampir semua listrik yang digunakan oleh industri : dibangkitkan, ditransmisikan dan didistribusikan dalam sistem tiga fasa. Sistem tiga fasa ini memiliki besar yang sama (untuk tegangan atau arus) tetapi mempunyai perbedaan sudut sebesar 120º antar fasanya. Sumbu ini disebut juga sumbu yang seimbang. Apabila sumber mensuplai sebuah beban seimbang, maka arus-arus yang mengalir pada masing-masing penghantar akan memiliki besar yang sama dan berbeda sudut fasa sebesar 120º satu sama lain. Arus ini disebut juga arus seimbang. Pada gambar 2.1. berikut memperlihatkan diagram fasor sebuah sistem seimbang. 13 Gambar 2.1. Diagram fasor sistem seimbang Sistem pada gambar 2.1. diatas disebut juga sistem urutan abc, dimana fasa b tertinggal 120º terhadap fasa a, dan fasa c tertinggal 120º terhadap fasa b, hanya satu kemungkinan urutan lagi selain urutan abc, yaitu urutan acb. Adapun penulisan secara matematis untuk diagram fasor diatas untuk urutan fasa abc dapat dijelaskan sebagai berikut : Vab = Van √3 ∠ 30º ...........................................................( 2.1 ) Vbc = Vbn √3 ∠ 30º ...........................................................( 2.2 ) Vca = Vcn √3 ∠ 30º ...........................................................( 2.3 ) Adapun daya yang digunakan pada masing-masing fasa pada beban adalah : P1∅ = Van I1 cos ϕ .......................................................( 2.4 ) dimana : I1 = arus Ia cos ϕ = factor daya Sedangkan untuk sistem yang seimbang, daya total yang dipergunakan adalah: P3∅ = 3 Van I1 cos ϕ = √3 V I1 cos ϕ dimana : .................................................( 2.5 ) V = teg. Fasa to fasa I1 = arus 14 2.2.2 Rectifier Rangkaian penyearah (rectifier) adalah suatu rangkaian yang mengubah tegangan bolak-balik (AC) menjadi tegangan searah (DC). Terdapat beberapa jenis rangkaian penyearah, yang masing-masing jenis memberikan hasil yang berbedabeda terhadap bentuk tegangan DC yang keluar. Perbandingan antara tegangan DC yang keluar terhadap tegangan AC yang ikut serta pada hasil outputnya, dinamakan faktor riak (ripple). Notasi untuk faktor ripple yang diberikan disini adalah r. Besarnya faktor ripple dapat dihitung dengan rumus : r = Vr x 100 % VDC …...………………………………………( 2.6 ) Dimana komponen DC adalah harga rata-rata tegangan DC pada keluarannya (output). Ini dapat dihitung dengan rumus : Vdc = 1/T ∫ Vo t dt ……......................................................( 2.7 ) Dan komponen AC adalah harga rms dari tegangan AC yang keluar. Namun karena komponen AC ini tercampur dengan komponen DC-nya, maka harus dipisahkan terlebih dahulu komponen DC-nya. Untuk menghitung faktor ripple ini, digunakan suatu rumus pendekatan, yaitu : r 2 Vrms . 2 - 1 x 100% Vdc ....................................................( 2.8 ) Dan Vrms 1 2 Vo dt .............................................( 2.9 ) T Beberapa rangkaian penyearah : a. Penyearah Setengah Gelombang Rangkaian penyearah setengah gelombang dapat dilihat pada gambar 2.2. berikut ini. 15 Gambar 2.2. Rangkaian penyearah setengah gelombang Apabila tegangan input berbentuk sinus, dapat dituliskan sebagai : Vi = Vm sin ω t untuk 0 < t < T/2 ..................................( 2.10 ) Dan apabila bebannya bersifat resistif, maka gelombang keluarannya (output) adalah seperti gambar 2.3. berikut : Gambar 2.3. Bentuk gelombang output Bentuk gelombang output Vo ini apabila dituliskan secara matematik adalah sebagai berikut : V0 (t) = Vm sin ω t, untuk 0<t<T/2 V0 (t) = 0 untuk T/2<t<T (T = 2π/ω) ................( 2.11 ) b. Penyearah Gelombang Penuh Rangkaian penyearah gelombang penuh dengan menggunakan rangkaian jembatan (bridge) dapat dilihat pada gambar 2.4. berikut : 16 Gambar 2.4. Rangkaian penyearah gelombang penuh c. Penyearah 3 Fasa Setengah Gelombang Rangkaian penyearah tiga fasa setengah gelombang ini dapat dilihat pada gambar 2.5. dan bentuk gelombang outputnya dapat dilihat pada gambar 2.6. berikut : Gambar 2.5. Rangkaian penyearah 3 fasa setengah gelombang Gambar 2.6. Bentuk gelombang output d. Penyearah 3 Fasa Gelombang Penuh Rangkaian penyearah tiga fasa gelombang penuh dapat dilihat pada gambar 2.7. sebagai berikut : 17 Gambar 2.7. Rangkaian Penyearah 3 Fasa Gelombang Penuh Bentuk tegangan keluarannya dapat dilihat pada gambar 2.8. Pada penyearah ini faktor ripple-nya adalah 4,2% dan untuk frekuensi dasar 50 Hz, frekuensi harmonis yang terasa dan ikut keluar pada output-nya adalah 300 Hz. Gambar 2.8. Bentuk gelombang output 2.2.3 Motor Arus Bolak-Balik (Motor AC) Motor arus bolak-balik adalah suatu mesin yang berfungsi mengubah tenaga listrik arus bolak-balik (listrik AC) menjadi tenaga gerak atau tenaga mekanik dimana tenaga gerak itu berupa putaran daripada rotor. Motor AC dapat dibedakan atas beberapa jenis. Pembagian motor disini didasarkan atas bermacam-macam tinjauan : a. Hubungan Putaran Motor dengan Frekuensi Bila ditinjau dari hubungan antara putaran dan frekuensi atau putaran flux magnit stator, maka motor AC dapat dibedakan atas : 1. Motor Sinkron (Motor Serempak) Disebut motor sinkron, karena kecepatan rotornya sama dengan kecepatan sinkron dari medan magnit putar sesuai dengan persamaan n = 120 f/p..........................................................................( 2.12 ) 18 dimana : n = jumlah putaran tiap menit (r.p.m) f = frekuensi jala-jala p = jumlah kutub 2. Motor Asinkron Disebut motor asinkron karena putaran motor tidak sama dengan putaran flux magnit stator, atau dengan kata lain bahwa antara rotor dan flux magnit stator terdapat selisih perputaran yang disebut dengan slip. Atau dapat dilihat dari persamaan berikut : n < 120 f/p b. Cara Penerimaan Tegangan dan Arus Ditinjau dari segi cara rotor menerima tegangan atau arus, dapat dikenal dua (2) jenis motor yaitu : a. Motor yang rotornya menerima tegangan secara langsung Motor jenis ini misalnya motor universal, motor DC. b. Motor induksi Disebut motor induksi karena dalam hal penerimaan tegangan dan arus pada rotor dilakukan dengan jalan induksi, rotor tidak langsung menerima tegangan atau arus dari luar. Prinsip kerja motor induksi : 1. Apabila sumber tegangan tiga fasa dipasang pada kumparan stator, maka akan timbul medan putar dengan kecepatan : ns = 120 f/p .......................................................................( 2.13 ) 2. Medan putar stator tersebut akan memotong batang konduktor pada rotor. 3. Akibat pada batang konduktor pada rotor akan timbul gaya gerak listrik induksi. 4. Karena batang konduktor merupakan rangkaian yang tertutup, maka gaya gerak listrik akan menghasilkan arus (I) 5. Adanya arus (I) didalam medan magnit, akan menimbulkan gaya (F) pada rotor. 19 6. Bila kopel mula yang dihasilkan oleh gaya (F) pada rotor cukup besar untuk memikul kopel beban, rotor akan berputar searah dengan medan putar stator. 7. Gaya gerak listrik induksi yang timbul karena terpotongnya batang konduktor (rotor) oleh medan putar stator. Artinya agar gaya gerak listrik induksi tersebut timbul, diperlukan adanya perbedaan relatif antara kecepatan medan putar stator (ns) dengan kecepatan medan putar rotor (nr). 8. Perbedaan antara ns dan nr disebut slip (s), dinyatakan dengan : S = ns – nr / ns x 100% .....................................................( 2.14 ) 9. Bila nr = ns, gaya gerak listrik tidak akan timbul dan arus tetap mengalir pada batang konduktor (rotor), dengan demikian tidak dihasilkan kopel. 10. Dilihat dari cara kerjanya, motor induksi disebut juga sebagai motor tak serempak atau asinkron. c. Jumlah Fasa Tegangan yang Digunakan Ditinjau dari jumlah fasa tegangan yang digunakan dapat dikenal dua jenis motor yaitu : 1. Motor satu fasa Disebut motor satu fasa karena untuk menghasilkan tenaga mekanik pada rotor tersebut dimasukkan tegangan satu fasa. Pada motor ini flux magnit hanya berganti arahnya saja sehingga menyukarkan bagi motor pada saat start. Untuk itu, diperlukan bantuan yang pada umumnya tidak sefasa dengan medan magnit lilitan utama, yang berarti harus terdapat lilitan kedua yang terpisah dari lilitan yang pertama. Jadi pada motor tersebut meskipun menggunakan listrik 1 fasa. Tetapi didalam lilitan stator terdapat arus listrik dua fasa dengan lilitan stator dua fasa pula. Lilitan ini disebut lilitan utama (main winding) dan lilitan bantu (auxiliary winding). Apabila motor berjalan normal, maka lilitan bantu dapat dilepas (tidak digunakan lagi). Motor satu fasa ini misalnya : motor kapasitor, motor shaded pole, motor repulsi dan motor seri. 20 2. Motor tiga fasa Disebut motor tiga fasa karena, untuk menghasilkan tenaga mekanik tegangan yang dimasukkan pada motor tersebut adalah tegangan tiga fasa. Pada motor ini lilitan statornya dimasukkan arus bolak-balik, maka disekitar stator terjadi flux magnit yang berubah-ubah. Motor jenis ini misalnya : motor dengan rotor lilit, motor dengan rotor sangkur tupai dan motor kolektor. Berikut ini adalah contoh dari jenis motor induksi beserta kumparan statornya. Gambar 2.9. Jenis motor induksi (lihat lampiran 3) Perputaran motor pada mesin arus bolak-balik ditimbulkan oleh adanya medan putar (flux yang berputar) yang dihasilkan dalam kumparan statornya. Medan putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak, umumnya fasa 3. Hubungan dapat berupa hubungan bintang (star) atau segitiga (delta). 21 Gambar 2.10. berikut ini akan menjelaskan bagaimana terjadinya medan putar tersebut. (a) (b) (c) Gambar 2.10. Gelombang Sinusoidal Keterangan : a. Gelombang dengan sudut 360º b. Gelombang dengan sudut 120º c. Gelombang dengan sudut 240º Gambar di atas merupakan bentuk dari masing-masing gelombang sebelum digabung menjadi gelombang output dari gambar di bawah. Gambar 2.11. Proses terjadinya medan putar Misalnya kumparan a-a ; b-b ; c-c dihubungkan tiga fasa, dengan beda fasa masing-masing 120º (gambar 2.11a) dan dialiri arus sinusoidal. Distribusi ia, ib, ic sebagai fungsi waktu adalah seperti pada gambar 2.11b. pada keadaan t1, t2, t3 dan t4, flux resultan yang ditimbulkan oleh kumparan tersebut masingmasing adalah seperti pada gambar II.11c, d, e, dan f. Pada t1 flux resultan mempunyai arah yang sama dengan arah flux yang dihasilkan oleh kumparan a- 22 a ; sedangkan pada t2, flux resultannya dihasilkan oleh kumparan b-b, untuk t4, flux resultannya berlawanan arah dengan flux resultan yang dihasilkan pada saat t1. Dari gambar II.11c, e dan f tersebut terlihat bahwa flux resultan ini akan berputar satu kali. Oleh karena itu, mesin dengan jumlah kutub lebih dari dua, kecepatan sinkron dapat diturunkan sebagai berikut : Ns = 120 f/p .......................................................................( 2.15 ) Dimana : P = jumlah kutub F = frekuensi 2.2.4 Transistor Sebagai Saklar Salah satu fungsi transistor yang sering digunakan dalam rangkaian digital ialah transistor sebagai saklar dan transistor sebagai penguat. Sebagai saklar maka transistor hanya akan beroperasi pada daerah saturasi atau tersumbat (cut-off). Jika sebuah transistor berada dalam keadaan saturasi, transistor tersebut seperti sebuah saklar yang tertutup dari kolektor ke emitor. Sebaliknya, jika transistor tersumbat, akan berlaku seperti saklar yang terbuka. 23 Gambar 2.12. Rangkaian Transistor Keterangan : a. Rangkaian dasar transistor sebagai saklar b. Sinyal input output pada kondisi ideal c. Garis beban DC Gambar 2.12a. dan b. menunjukkan rangkaian transistor sebagai saklar beserta tegangan input dan outputnya untuk keadaan ideal sedangkan gambar 2.12c. menggambarkan garis beban DC-nya sebagai catatan tegangan Vcc dan Vbb yang diberikan merupakan tegangan positif. Hukum Kirchoff untuk tegangan menyatakan jumlah tegangan pada satu loop adalah 0. Σ E = 0................................................................................( 2.16 ) Bila diterapkan pada simpul input maka : - VBB + IBRB + VBE = 0 ..........................................................................( 2.17 ) 24 Untuk simpul atau loop output : - Vcc + IcRc + VCE = 0 IC = VC − VCE ...............................................................( 2.18 ) RC Pada saat transistor saturasi, tegangan VCE berkisar 0,2 Volt (idealnya 0 Volt) sehingga arus kolektor yang mengalir pada saat saturasi bila transistor dianggap ideal adalah : ...............................................................................( 2.19 ) Jika sebuah transistor berada dalam keadaan saturasi, maka transistor tersebut seperti sebuah saklar yang tertutup dari kolektor ke emiter. Jika transistor tersumbat (berada dalam keadaan cut off), transistor tersebut seperti sebuah saklar terbuka. Gambar II.13. memperlihatkan garis beban DC sebuah transistor yang beroperasi sebagai saklar. Gambar 2.13. Garis beban 25 Jika arus basis lebih besar atau sama dengan 1b saturasi, titik kerja Q berada pada ujung atas dari garis beban gambar 2.13. Pada gambar ini transistor kelihatan seperti sebuah saklar tertutup. Sebaliknya jika arus basis nol, transistor bekerja pada ujung bawah dari garis beban, dan transistor seperti sebuah saklar terbuka. 2.2.5 Dekoder Dekoder berfungsi sebagai pengubah data dalam kombinasi kode biner menjadi bentuk kode lain, dalam hal ini kombinasi kode desimal. Beberapa jenis dekoder yaitu : 1. Dekoder BCD ke Desimal 2. Dekoder BCD ke Biner 3. Dekoder Biner ke Oktal 4. Dekoder BCD ke 7-Segment Keluaran dari dekoder ini kemudian bisa dilihat melalui piranti lain agar tampak oleh mata manusia yaitu penampil (display). Dalam Tugas Akhir ini penulis akan membahas satu jenis dekoder saja yaitu : Dekoder BCD ke Desimal. Rangkaian dekoder BCD ke desimal adalah rangkaian yang berfungsi untuk mengontrol penampilan (display) dari bilangan-bilangan sandi BCD (bilangan biner empat bit) menjadi bilangan desimal yang biasa. Penampilan atau display-nya adalah berupa Tabung Angka (Nixie Tube) : yaitu filamen-filamen berbentuk angka desimal 0 (nol) sampai 9 (sembilan) yang sangat tipis. Dengan demikian rangkaian dekoder BCD tersebut mempunyai 10 (sepuluh) jalan keluaran yaitu : line 0, line 1, … dan line 9, dimana masing-masing line bertugas untuk mengontrol filamen mana yang menyala. Misalnya dikehendaki untuk menampilkan sandi 8421 BCD : 0101, maka hanya line 5 yang bekerja sehingga nantinya filamen angka 5 desimal yang menyala. Dengan cara tersebut, maka hasilhasil perhitungan (pengukuran-pengukuran) dapat dilihat langsung dalam bilangan desimal sesuai yang digunakan sehari-hari. Ingat saja misalnya pada jam digital atau pada mesin-mesin penghitung kecil atau kalkulator. Selanjutnya cara kerja dari rangkaian dekoder BCD tersebut dapat dipelajari dengan melihat gambar berikut. 26 Gambar 2.14. Dekoder BCD ke Desimal 2.2.6 Display (Seven Segment) Display atau penampil merupakan piranti yang digunakan untuk menampilkan kode-kode desimal agar dapat dibaca, tujuh buah LED ini membentuk angka delapan, dengan mengaktifkan atau mematikan beberapa LED akan didapat bentuk angka nol (0) sampai sembilan (9) sesuai dengan angka yang ingin ditampilkan seperti pada gambar 2.15. Gambar 2.15. (a) Seven Segment (b) Angka kombinasi LED aktif 27 Display 7-Segment ini terbagi dua, yaitu : 1. Display 7-Segment Common Cathode (katoda bersama) Rangkaian dasar dari display jenis ini pada dasarnya adalah beberapa buah LED yang telah disusun membentuk suatu konfigurasi, dalam hal ini bentuk angka delapan. Gambar 2.16. Tampilan Seven Segment Common Cathode Pada gambar diatas tampak masing-masing segment (ruas) dari a sampai g merupakan susunan LED-LED yang mempunyai hubungan bersama (tunggal) pada polaris negatif. 2. Display 7-Segment Common Anode (anode bersama) Rangkaian dasar dari display jenis ini sama dengan display 7-segment common cathode, yang membedakan hanyalah hubungan tunggal pada polarisnya yang merupakan kebalikkan dari jenis common cathode, yaitu anode. Pada display jenis anode ini, polaris positifnya yang saling berhubungan. 28 Gambar 2.17. Tampilan Seven Segment Common Anode 2.2.7 Converter (Pengubah) Pada saat ini, peralatan-peralatan elektronika modern telah banyak menerapkan teknik pengiriman data-datanya berupa pulsa digit. Misalnya pada peralatan komunukasi, radar, sonar dan sebagainya. Hal tersebut disebabkan karena penggunaan pulsa-pulsa digit lebih banyak memberikan keuntungan dibandingkan dengan penggunaan sinyal analog. Diantara keuntungan penggunaan pulsa digit adalah sebagai berikut : 1. Data-data yang dikirimkan juga dapat dimodulasikan dengan mudah. 2. Untuk menghemat lebar jalur (bandwidth). 3. Pengontrolan sistem pengiriman dan sistem penerimaannya dapat dibuat lebih cermat, sehingga kebenaran data-datanya lebih mantap, dan lebih dapat dijamin kerahasiaan maupun keutuhannya. 4. Untuk mengurangi adanya gangguan, baik gangguan karena alam maupun gangguan dari musuh (jamming) dan sebagainya. Untuk melaksanakan hal-hal tersebut di atas, digunakanlah suatu rangkaian yang disebut converter (pengubah). Menurut jenisnya converter dibagi menjadi dua yaitu : 1. Digital to Analog Converter (pengubah digital ke analog) Dalam banyak pemakaian, ada keuntungan-keuntungan yang dihasilkan dari pengolahan sinyal digital dari pada analog. Akan tetapi, banyak sistem fisis yang memerlukan sinyal analog supaya sistem-sistem tersebut dapat dioperasikan secara efektif. Sebagai akibatnya, maka seringkali perlu mengubah sinyal keluaran biner dari sebuah pengolah digital menjadi sebuah sinyal analog yang ekivalen dengan menggunakan peralatan pengubah digital menjadi analog atau digital to analog converter (DAC). Metode pengubahan sinyal digital menjadi analog yang paling sederhana adalah penggunaan jaringan hambatan yang berbobot biner. 29 2. Analog to Digital Converter (pengubah analog ke digital) Untuk menggunakan keuntungan-keuntungan pengolahan digital, maka sinyalsinyal yang pada pokoknya adalah analog yang timbul dalam kebanyakan sistem fisis harus diubah menjadi sinyal-sinyal biner yang bersangkutan. Maka digunakanlah suatu rangkaian untuk mengubahnya yaitu rangkaian pangubah analog ke digital. Salah satu jenis rangkaian analog to digital converter adalah pengubah A/D penghitung tunggal (Single Counter A/D Converter) seperti gambar berikut ini. Gambar 2.18. Pengubah Analog ke Digital yang mempunyai penghitung tunggal. Terlihat pada gambar diatas, sebuah penghitung biner digunakan untuk menghitung banyaknya pulsa jam. Hitungan ini membentuk masukan pada pengubah D/A, yang tegangan keluarannya dibandingkan dengan masukan analog dengan cara menggunakan sebuah pembanding. Keluaran pembanding berada di V (1) selama keluaran dari pengubah D/A lebih kecil daripada tingkat sinyal analog. Gerbang AND kemudian akan dapat mentransmisikan pulsa jam kepada penghitung tersebut. Bila sinyal keluaran D/A lebih besar daripada sinyal analog, maka pembanding beralih ke V (0), dan sebagai konsekuensinya maka akan merintangi gerbang AND dan menghentikan hitungan. Keluaran dari penghitung biner adalah kata biner yang diinginkan dan menyatakan sistem analog yang dipilih. 30 2.2.8. Filter Filter adalah sebuah peralatan yang melakukan (pass) beberapa frekuensi sinusoidal menyetop yang lainnya. Idenya adalah menghilangkan semua komponen sinusoidal dan hanya maninggalkan komponen DC. Filter menurut jenisnya dibagi menjadi : 1. High Pass Filter (filter lewat atas) High Pass Filter adalah filter yang melakukan (pass) frekuensi-frekuensi tinggi, tetapi menahan frekuensi rendah. 2. Low Pass Filter (filter lewat bawah) Low Pass Filter adalah filter yang melakukan (pass) frekuensi-frekuensi rendah, tetapi menahan frekuensi tinggi. 3. Band Pass Filter (filter lewat pita) Band Pass Filter sering disebut juga sebuah jendela karena efeknya terhadap spektrum. 4. Band Reject Filter (filter pita tolak) Band Reject Filter didapatkan dengan hubungan paralel bagian lewat atas yang mempunyai frekuensi putus foL dengan bagian lewat bawah yang berfrekuensi putus foH. Catatan bahwa untuk karakteristik pita tolak diperlukan foH<foL. 31