Deteksi Lokasi Gangguan pada Saluran Transmisi
advertisement

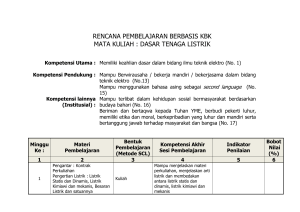
Proseding Seminar Tugas Akhir Teknik Elektro FTI-ITS, Oktober 2013 Deteksi Lokasi Gangguan pada Saluran Transmisi menggunakan Gelombang Berjalan dan Transformasi Park Anggi Budi S, Dimas Anton A dan Arif Musthofa. Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111 E-mail: [email protected] Abstrak — Dalam sistem tenaga listrik, saluran transmisi memiliki peran yang sangat penting yaitu sebagai penyalur daya listrik dari sebuah pembangkit/ sumber ke pusat-pusat beban. Diperlukannya metode deteksi lokasi gangguan yang akurat dan cepat untuk mengurangi waktu pencarian, sehingga mempercepat proses perbaikan. Pada tugas akhir ini akan digunakan metode kombinasi gelombang berjalan dan transformasi park, lalu akan diolah menggunakan Adaptive Neuro Fuzzy Inference System (ANFIS). Saat terjadi gangguan pada saluran transmisi, akan menyebabkan timbulnya gelombang berjalan yang berupa tegangan dan arus. Gelombang berjalan ini akan ditransformasikan oleh transformasi park pada kedua ujung saluran, untuk mendapatkan waktu awal terjadinya gangguan/ trensien yang mana terdapat perbedaan waktu pada tiap ujung saluran. Didapatkannya tren pada perbedaan waktu ini yang akan di olah menggunakan ANFIS untuk mendapatkan pola letak gangguan. Dengan membandingkan antara input tegangan, input arus dan input tegangan dan arus pada pengolahan ANFIS, berdasarkan hasil simulasi didapatkannya input tegangan dan arus memiliki error paling kecil. Kata Kunci — deteksi lokasi gangguan, saluran transmisi, gelombang berjalan, transformasi park, ANFIS. I. PENDAHULUAN engan seiringnya jaman, pertumbuhan kebutuhan listrik meningkat seiring pertumbuhan penduduk. Dengan semakin banyaknya kebutuhan listrik maka kapasitas dari pembangkit/ sumber dan beban ikut meningkat, begitu pula dengan panjang saluran transmisi. Sekitar 85% sampai 87% gangguan yang terjadi pada sistem tenaga listrik, berasal dari gangguan pada saluran transmisi [1]. Salah satu gangguan pada saluran transmisi adalah gangguan hubung singkat. Oleh karena itu dibutuhkan metode penentuan lokasi gangguan hubung singkat yang secara akurat dan cepat untuk mengurangi waktu pencarian yang digunakan. Sehingga dapat menjaga kontinuitas dan keandalan dalam penyaluran daya dari sistem tenaga listrik. Pada saat terjadi gangguan nilai tegangan dan arus di saluran transmisi akan berubah pada titik gangguan. Nilai tegangan akan menurun dan sebaliknya nilai arus akan naik. Dari perubahan tegangan dan arus yang naik turun secara tiba-tiba ini menghasilkan sebuah impuls dengan frekuensi yang tinggi, yang disebut juga gelombang berjalan [2]. Dalam tugas akhir ini digunakan metode kombinasi gelombang berjalan, Transformasi Park dan di olah dengan D Adaptive Neuro Fuzzy Inference System (ANFIS). Dengan metode ini dapat ditentukan lokasi gangguan, dengan cara menganalisa gelombang berjalan yang terjadi setelah saluran transmisi terkena gangguan. Gelombang berjalan ini merambat jauh dari titik gangguan ke kedua ujung saluran dengan kecepatan yang hampir mendekati kecepatan cahaya. Sehingga di kedua ujung terekam sebuah impulse frekuensi yang tinggi, tetapi puncak gelombang dari impulse di setiap ujung memiliki perbedaan waktu walaupun sangat kecil. Dengan mentransformasikan gelombang di kedua ujung dengan transformasi park dapat dilihat lebih jelas perbedaan waktu yang ada. Kemudian perbedaan waktu tersebut akan diolah oleh ANFIS untuk mendapatkan data training, yang dapat digunakan dalam penentuan lokasi gangguan. II. METODE DETEKSI LOKASI GANGGUAN A. Gelombang Berjalan Pada [3] dijelaskan bahwa peristiwa merambatnya arus dan tegangan pada kawat penghantar saluran transmisi dengan magnitude berubah terhadap waktu dan panjang saluran disebut juga gelombang berjalan. Gelombang berjalan pada saluran transmisi terjadi karena adanya gangguan seperti open circuit, hubung singkat atau perubahan impedansi pada titik tertentu. Pada titik tertentu tersebut gelombang berjalan akan dipantulkan kembali dan sebagian lagi akan di teruskan ke bagian lain dari titik tersebut, yang nilai arus dan tegangan dapat meningkat dari 0 sampai 2 kali besar arus dan tegangan gelombang yang datang. Gambar 1. Perubahan impedansi pada titik peralihan. Pada Gambar 1. dapat diperlihatkan munculnya gelombang berjalan, dimana e1 adalah gelombang datang, e2 adalah Backward Travelling Wave, e3 adalah Forward Travelling Wave. Proseding Seminar Tugas Akhir Teknik Elektro FTI-ITS, Oktober 2013 Dimana matrix transformasi dq0 didefinisikan sebagai berikut: ⎡ 𝑐𝑜𝑠𝜃𝑑 2⎢ [Tdq0(θd)]=3 ⎢−𝑠𝑖𝑛𝜃𝑑 ⎢ 1 ⎣ 2 Gambar 2. Perbedaan waktu pada kedua ujung saluran transmisi Pada Gambar 2. Dapat dilihat awal terjadinya gangguan pada saluran transmisi. Didapatkan bahwa waktu awal terjadi gangguan pada kedua ujung saluran memiliki perbedaan waktu, yang mana tergantung pada panjang lokasi gangguan. Tetapi hanya menggunakan gelombang berjalan tidak bisa untuk mendapatkannya waktu awal terjadi gangguan, karena terdapatnya perbedaan fasa yang ada B. Transformasi Park Pada [4] telah dijelaskan bahwa transformasi park telah digunakan pada sistem kelistrikan, khususnya pada penelitian mengenai mesin sinkron salient pole. Dimana variabel induktansi yang bervariasi dalam reference frame statis dianggap sebagai induktansi konstan ketika reference frame berputar pada kecepatan sinkron ωs. Pada kasus ini reference frame yang berputar tersebut dapat menghilangkan sinyal power frekuensi pada gelombang tegangan, sehingga tersisa variabel waktu dimana dari variabel tersebut dapat ditentukan sebagai waktu awal terjadi gangguan. Secara matematis trasnformasi park digunakan untuk mentransformasikan semua kuantitas stator dari sumbu abc ke dalam referensi variabel baru yang disebut rotor, dimana variabel baru ini adalah sumbu dq0. Variabel tersebut berupa arus dan tegangan dalam bentuk variabel aktual kumparan stator. Untuk mempermudah perhitungan, disini digunakan sumbu fasa a sebagai fasa referensi, sehingga untuk mendeteksi waktu awal terjadi gangguan sumbu d saja yang akan diperhatikan. Pada keadaan normal (sistem tiga fasa seimbang) bentuk sinyal sumbu d akan terlihat dalam keadaan steady state, namun jika gangguan terjadi bentuk sinyal tersebut akan mengalami osilasi. Lonjakkan awal inilah yang menandakan awal terjadinya gangguan. Persamaan transformasi park dapat dilihat sebagai berikut: [fdq0] = [Tdq0(θd)] [fabc] (1.1) 2𝜋 −𝑠𝑖𝑛(𝜃𝑑 − 1 2 ) 3 2𝜋 3 cos(𝜃𝑑 + 2𝜋 )⎤ ⎥ ) −𝑠𝑖𝑛(𝜃𝑑 + 3 )⎥ (1.3) ⎥ 1 ⎦ 2 3 2𝜋 Dimana fabc adalah tegangan atau arus tiga fasa yang digunakan, fdq0 adalah direct axis, quadrature axis dan zero axis (Vd, Vq, V0 untuk tegangan dan Id, Iq, I0 untuk arus), k adalah sampel sinyal ke-k. Keuntngan lain dari tranformasi park, adalah cukup dengan variabel direct axis saja mampu untuk menentukan awal terjadinya transien. C. Adaptive Neuro Fuzzy Inference System (ANFIS) ANFIS adalah implementasi neural network dari T-S(TakagiSugeno) fuzzy inference system [5]. ANFIS merupakan aplikasi dari algoritma hybrid, yang merupakan paradigma pembelajaran dimana algoritma pembelajar di training untuk satu tugas yang sama. Dan prediksi dari komponen pembelajaran digabungkan untuk menangani kejadian yang akan datang. ANFIS memiliki kelebihan dari kedua fuzzy inference system dan neural network. III. PEMODELAN Pada tugas akhir ini digunakan simulasi dengan data sistem Jawa-Madura-Bali (JAMALI) 500 kV saluran transmisi antara Surabaya Barat dan Ungaran yang memiliki panjang saluran 250 km, menggunakan software MATLAB, kemudian akan dimonotoring menggunakan software LabVIEW. Dimana pada simulasi ini diperlukannya beberapa data dari parameter yang didapat. Seperti tegangan san sudut pada kedua ujung saluran, lalu arus hubung singkat bila terjadi gangguan, dimana untuk mendapatkan arus hubung singkat tersebut diperlukannya bersar hubung singkat dan X/R ratio dari kedua bus. Yang akan dipaparkan lebih jelas pada Tabel 1 dan Tabel 2 Tabel 1 Parameter sumber wilayah timur wilayah barat 489000 467000 Sudut fasa A (˚) 12 6 frekuensi (Hz) 50 50 internal connection Yg Yg 38623,6 18878,8 5,00E+05 5,00E+05 28 12 Vrms(V) short circuit level 3 fasa(MVA) Atau 𝑓𝑑 (𝑘) 𝑓𝑎 (𝑘) � 𝑓𝑞 (𝑘) � = [T𝑑𝑞0(𝜃𝑑)] × �𝑓𝑏 (𝑘)� 𝑓𝑐 (𝑘) 𝑓0 (𝑘) cos(𝜃𝑑 − Base voltage (Vrms ph-ph) X/R ratio (1.2) Tabel 2 Parameter penampang saluran Parameter Besaran Frekuensi (Hz) 50 [r1 r0] (Ohm/km) [0.0293 0.3864] [l1 l0] (H/km) -3 [0.896x10 4.1264 x10-3] Proseding Seminar Tugas Akhir Teknik Elektro FTI-ITS, Oktober 2013 Parameter Besaran -9 [12.74 x10 7.751 x10-9] [c1 c0] (F/km) lsec (km) 250 Setelah didapatkan semua data saluran transmisi, maka akan dimodelkan saluran tranmisi dari data Table 1 dan Tabel 2. Dibutuhkannya beberapa langkah permodelan dan analisa untuk mendesain sistem yang dapat menentukan lokasi gangguan pada saluran transmisi. Langkah pertama adalah memodelkan saluran transmisi JAMALI 500 kV tersebut. Langkah kedua dengan adanya pemodelan tersebut akan disimulasikan gangguan hubung singkat dengan beberapa kondisi. Langkah ketiga dengan mentransformasikan tegangan dan arus tiga fasa pada kedua ujung saluran, didapatkannya waktu awal terjadi gangguan/ transien. Setelah itu, waktu awal transien pada kedua ujung memiliki perbedaan, dimana perbedaan ini memiliki tren. Kemudian mendesain ANFIS untuk menentukan lokasi gangguan pada saluran transmisi, dimana input dari ANFIS ini adalah tren perbedaan waktu awal terjadi gangguan pada gangguan yang terjadi. IV. SIMULASI DAN ANALISIS A. Simulasi gangguan hubung singkat Setalah didapatkan pemodelan saluran transmisi, maka akan dilakukan simulasi gangguan hubung singkat pada saluran transmisi dengan berbagai variasi kondisi. 4 𝑐𝑑𝑖𝑓 (𝑖) = 4 1 Volt -1 Vd 0.01 0.02 0.03 0.04 0.07 0.08 0.09 0 0.01 0.02 0.03 0.04 0.05 t(s) B 0.06 0.07 0.08 0.09 0.1 0.01 0.02 0.03 0.04 0.05 t(s) C 0.06 0.07 0.08 0.09 0.1 0.01 0.02 0.03 0.04 0.05 t(s) D 0.06 0.07 0.08 0.09 0.1 0.01 0.02 0.03 0.04 0.05 t(s) 0.06 0.07 0.08 0.09 0.1 x 10 5 0.1 4.5 0 8 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 C 4 x 10 Cdif 2 -2 0 16 -5 0 0.01 5 x 10 1 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 D 0 -1 x 10 0 0 0 0.01 0.02 0.03 0.04 0.05 t(s) 0.06 0.07 0.08 0.09 0.1 Gambar 3. (A) hubung singkat 1 fasa ke tanah, (B) antar fasa, (C) hubung singkat 2 fasa ke tanah, (D) hubung singkat 3 fasa ke tanah Pada Gambar 3. diperlihatkan gangguan hubung singkat dengan perbedaan bentuk gelombang dengan variasi jenis gangguan. Variasi kondisi hubung singkat yang akan disimulasikan meliputi jarak gangguan, jenis gangguan, Fault Inception Angle (FIA), Resistance Fault (RF). Jarak gangguan yang disimulasikan yaitu gangguan setiap 10% dari panjang saluran transmisi (250km). Lalu jenis gangguan meliputi gangguan satu fasa ke tanah (A-G), antar fasa (A-B), dua fasa ke tanah (AB-G), tiga fasa ke tanah (ABC-G). FIA meliputi 0˚, 45 ˚, 90˚, 135 ˚, 180 ˚. RF meliputi 0,01, 10 dan 50 Ohm. Cdif kuadrat Volt 0.06 0 5 Volt 0.05 B x 10 5 Volt 0 5.5 4 -5 A x 10 5 0 (1.4) Δt Dimana Vd adalah tegangan sumbu d, i adalah sample number ke-i, lalu Δt adalah time step. Untuk lebih memperkuat nilai (cdif) dan menghilangkan nilai negatif, maka digunakan [cdif]2, yang mana adalah hasil kuadrat dari (cdif) . 0 -5 𝑉𝑑 (𝑖)−𝑉𝑑 (𝑖−1) A x 10 5 B. Simulasi Transformasi Park Transformasi park digunakan pada tegangan dan arus di kedua ujung saluran. Dengan tidak seimbangnya tegangan dan arus, transformasi park tetap mampu untuk menentukan awal terjadinya gangguan. Pada metode ini dapat digunakan tegangan atau arus secara individu atau kedua-duanya, yang mana akan akan dibandingkan. Pada beberapa kondisi seperti pada kondisi high impedance, sulit untuk menentukan secara akurat waktu awal terjadi gangguan, karena saat terjadi gangguan lonjakkan gelombang dari tegangan dan arus (tegangan dan arus gangguan)semakin kecil, mendekati kondisi normal. Oleh karena itu untuk mengatasi hal tersebut dan mengurangi error yang ada maka digunakan koefisien diferensial (cdif), yang mana akan memperkuat hasi transformasi park sehingga akan mampu menentukan waktu awal terjadi gangguan. Dimana permsamaan (cdif) akan dipaparkan sebagai berikut: V 3 fasa Lanjutan Tabel 2. 2 x 10 1 0 0 Gambar 4. 4. (A) tegangan 3 fasa, (B) tegangan sumbu d (Vd), (C) cdif, (D) [cdif]2 Pada Gambar 4. diperlihatkan dengan menggunakan [cdif]2, didapatkan waktu awal terjadi gangguan pada kedua ujung saluran, yang mana akan dibandingkan antara waktu awal terjadi gangguan pada wilayah timur dan wilayah barat, sehingga didapatkan perbedaan waktu. Proseding Seminar Tugas Akhir Teknik Elektro FTI-ITS, Oktober 2013 testing ini mengambil 20% dari semua data selain data training. Pengolahan data testing ini digunakan untuk menguji berapakah presentase keakuratan dari data training dalam menentukan lokasi gangguan. Pengambilan data untuk training dan testing terdapat pada Tabel 4 wilayah timur 16 2 x 10 cdif kuadrat 1.5 1 0.5 0 600 800 750 700 650 cdif kuadrat 1000 950 900 1100 1050 Table 4 Pengambilan data training dan testing wilayah barat 15 15 850 sample number x 10 Pengambilan Data Kondisi Gangguan 10 Training 5 0 600 Hubung singkat 1fasa ke 800 750 700 650 850 sample number 1000 950 900 1100 1050 Gambar 5. Perbedaan waktu (Δt) awal terjadi gangguan antara wilayah timur dan wilayah barat Setelah mengetahui perbedaan waktu awal terjadi gangguan pada kedua ujung saluran, maka akan disimulasikan semua variasi kondisi gangguan untuk mendapatkan semua Δt tersebut dengan melihat tegangan, arus secara individu atau tegangan dan arus bersamaan Saat jarak gangguan diubah semakin jauh dari wilayah timur atau wilayah barat (setiap interval 10% panjang saluran), nilai Δt semakin meningkat, sehingga terbentuknya tren dari perbedaan waktu tersebut. Dari tren itu akan dinormalisasikan untuk mempermudah perhitungan. Yang mana tren tersebut dapat dilihat pada Tabel 3. Tabel 3 Tren perbedaan waktu (Δt) awal terjadi gangguan (A-G) FIA RF (Ω) jarak (km) 108 27 Hubung antar fasa (AB) 108 27 Hubung singkat 2fasa ke 108 27 108 27 432 108 tanah (A-G) tanah (AB-G) Hubung singkat 3fasa ke tanah (ABC-G) Total Setelah didapatkan data-data yang akan diolah, selanjut akan di coba untuk menentukan jumlah membership function untuk mendapatkan error yang paling kecil. Disini akan dicoba jumlah membership function 3, 5 dan 10. Dimana hasil dari masing-masing jumlah membership function dapat dilihat pada Tabel 5 Tabel 5 error rata-rata MF3, MF5, MF10 25 50 75 100 125 150 175 200 225 0 0,12 0,24 0,32 0,4 0,52 0,68 0,84 1 error rata-rata (%) Jumlah MF 0 0 Training C. Simulasi ANFIS Setelah diketahui output dari transformasi park pada kedua ujung saluran yang berupa perbedaan waktu awal terjadi gangguan memiliki tren, maka akan dimodelkan ANFIS untuk mengolah tren tersebut sehingga dapat menentukan lokasi gangguan. Dengan input adalah tren perbedaan waktu awal terjadi gangguan dikedua ujung saluran (arus, tegangan, arus dan tegangan) dan output adalah lokasi gangguan yang sebenarnya. Type membersip function yang dipilih adalah type Bell. Dengan jumlah membership function 3, 5 dan 10, yang mana akan dibandingkan dan ditentukan mana yang lebih akurat. Berikut adalah persamaan membership function bentuk Bell: 𝑓(𝑥, 𝑎, 𝑏, 𝑐) = 1+� 1 𝑥−𝑐 2𝑏 � 𝑎 Testing (1.5) Dimana {a, b, c} adalah parameter yang diatur dengan nilai parameter yang diubah. Pengolahan data dengan ANFIS ini dibagi menjadi dua, yaitu meliputi pengolahan data training dan pengolahan data testing. . Pengolahan data training ini mengambil 80% dari smua data yang ada, untuk dilatih mendapatkan pola dari setiap variasi kondisi gangguan. Sedangkan pengolahan data 3 5 10 Testing 1,030829 1,229367 0,002924 0,006538 0,000284 0,000268 Dapat dilihat bahwa 10 membership function yang memiliki error paling kecil. Sehingga pada pemodelan ANFIS digunakan 10 membership function pada masingmasing input. Setelah didapatkan desain ANFIS maka akan diolah semua data yang ada yaitu total 432 data training dan 108 data testing. Dimana akan dibutuhkan perhitungan error. Disini digunakan dua perhitungan error, yaitu The Mean Absolute Precentage Error (MAPE) dan The Mean Squared Error (MSE). Dimana persamaannya akan dipaparkan sebagai berikut: 1 𝑀𝐴𝑃𝐸 = ∑𝑛𝑡=1 1 𝑛 |𝑋𝑡 −𝑋�𝑡 | (1.6) 2 (1.7) 𝑋𝑡 𝑀𝑆𝐸 = ∑𝑛𝑡=1�𝑋𝑡 − 𝑋�𝑡 � 𝑛 Proseding Seminar Tugas Akhir Teknik Elektro FTI-ITS, Oktober 2013 Dimana: N = jumlah data 𝑋𝑡 = nilai sebenarnya pada t 𝑋�𝑡 = nilai ramalan pada t Dengan demikian akan dihitung MAPE dan MSE pada setiap variasi kondisi gangguan, dengan melihat input tegangan, arus, tegangan dan arus yang akan dibandingkan untuk mendapatkan error paling kecil. Dimana perbandingan tersebut dapat dilihat pada Tabel 6 dan Tabel 7. Tabel 6 hasil MAPE (%) V Jenis Gangguan I V&I training testing training testing training testing A-G 13,62 14,53 0,51 0,78 0,04 0,37 AB 13,62 17,61 10,70 8,45 0,06 0,21 AB-G 9,60 10,95 0,87 1,03 0,09 0,77 ABC-G 5,46 6,21 0,82 1,06 2,6E-07 3,6E-07 Tabel 7. hasil MSE V Jenis Gangguan I V&I training testing training testing training A-G 196,11 283,07 4,17 11,39 0,01 3,29 AB 214,97 214,56 141,08 31,06 0,01 0,67 AB-G 101,14 103,80 4,19 2,38 0,02 2,71 41,05 32,59 7,85 12,90 2,6E-07 3,6E-07 ABC-G testing Dapat dilihat dari sumua variasi kondisi gangguan yang disimulasikan, error yang paling terdapat pada gangguan tiga fasa ke tanah (ABC-G). Tabel 8. hasil seluruh error hasil seluruh MAPE (%) V I V&I training testing training testing training testing 10,57 12,32 3,22 2,83 0,05 0,34 hasil seluruh MSE V I V&I training testing training testing training Testing 138,32 158,51 39,32 14,43 0,01 1,67 Pada Tabel 8 dapat dilihat hasil seluruh error dari semua pengolahan data yang ada. Input tegangan dan arus memliki error paling kecil dibandingkan input tegangan atau input arus. V. KESIMPULAN Berdasarkan dari hasil simulasi dan analisis yang diperoleh pada tugas akhir ini, didapatkan bahwa metode kombinasi Gelombang Berjalan dan Transformasi Park lalu diolah dengan Adaptive Neuro Fuzzy Inference System (ANFIS) mampu untuk mendeteksi lokasi gangguan pada saluran transmisi. Dimana gangguan tersebut memiliki beberapa variasi kondisi, meliputi jarak gangguan (setiap 10% dari panjang saluran), jenis gangguan (satu fasa ke tanah, antar fasa, dua fasa ke tanah, tiga fasa ke tanah), Resistance Fault (0, 10, 50Ω) dan Fault Inception Angle (00, 450, 900, 1350, 1800). Dicobanya variasi input untuk ANFIS, meliputi input tegangan, input arus, input tegangan dan arus. Dari hasil pengolahan ANFIS didapatkan dimana error input tegangan 2.83%, error input arus 12.38%, error input tegangan dan arus 0.34%. Sehingga dapat dilihat input tegangan dan arus memiliki keakurasian yang paling besar dengan error yang paling kecil. Sehingga didapatkan metode dengan tingkat keakurasian yang besar untuk mendeteksi lokasi gangguan pada saluran transmisi. DAFTAR PUSTAKA [1] Singh, M., Panigrahi, K.B., Maheshwari, R.P, “Transmission line fault detection and classification” Emerging Trends in Electrical and Computer Technology (ICETECT), 2011 International Conference on 23-24 March 2011 , Page(s): 15 – 22 [2] Reddy. B. Ravindhranath, Kumar. M. Vijay, Kalavathi. M. Surya, Kumar. P. Rajini., “Localization of Fauls on Power Transmission Lines Using Travelling Wave Theory”, ARPN Journal of Engineering and Applied Sciences, March 2010. [3] Hutauruk, T.S., “Gelombang Berjalan dan Proteksi Surja”, Jakarta, Erlangga, 1989. [4] F. V. Lopes, D. Fernandes, Jr., andW. L. A. Neves, “A Traveling-Wave Detection Method Based on Park’s Transformation for Fault Locators,” in journal IEEE transaction on power delivery., April 2013 [5] De-Wang Chen and Jun-Ping Zhang, “Time Series Prediction Based on Esemble ANFIS”,