BAB II LANDASAN TEORI
advertisement

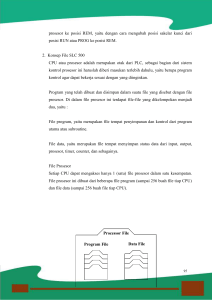
5 BAB II LANDASAN TEORI 2.1 Pengenalan Umum Programmable Logic Control (PLC) PLC pertama kali diperkenalkan pada tahun 1960-an. Alasan utama perancangan PLC adalah untuk menghilangkan beban ongkos perawatan dan penggantian sistem kontrol mesin berbasis relay. Bedford Associate (Bedford, MA) mengajukan usulan yang diberi nama MODICON (kepanjangan Modular Digital controller) untuk perusahaan-perusahaan mobil di Amerika. Sedangkan perusahaan lain mengajukan sistem berbasis komputer (PDP-8). MODICON 084 merupakan PLC pertama di dunia yang digunakan pada produk komersil. Saat kebutuhan produksi berubah maka demikian pula dengan sistem kontrol-nya. Hal ini menjadi sangat mahal jika perubahannya terlalu sering. Karena relai merupakan alat mekanik, maka, tentu saja, memiliki umur hidup atau masa penggunaan yang terbatas, yang akhirnya membutuhkan jadwal perawatan yang ketat. Pelacakan kerusakan atau kesalahan menjadi cukup membosankan jika banyak relai yang digunakan. Bayangkan saja sebuah panel kontrol yang dilengkapi dengan monitor ratusan hingga ribuan relai yang terkandung pada sistem kontrol tersebut. Bagaimana kompleks-nya melakukan pengkabelan pada relai-relai tersebut. Bayangkan saja hal ini. Dengan demikian "pengontrol baru" (the new controller) ini harus memudahkan para teknisi perawatan dan teknisi lapangan melakukan pemrograman. Umur alat harus menjadi lebih panjang dan program proses dapat dimodifikasi atau dirubah dengan lebih mudah. Serta harus mampu bertahan dalam lingkungan industri yang keras. Jawabannya ? Penggunaan teknik pemrograman yang sudah banyak digunakan (masalah kebiasaan dan pada dasarnya bahwa 'people do not like to change') dan mengganti bagian-bagian mekanik dengan teknologi solid-state (IC atau mikroelektronika atau sejenisnya) Pada pertengahan tahun 1970-an, teknologi PLC yang dominan adalah sekuenser mesinkondisi dan CPU berbasis bit-slice. Prosesor AMD 2901 dan 2903 cukup populer digunakan dalam MODICON dan PLC A-B. Mikroprosesor konvensional kekurangan daya dalam menyelesaikan secara cepat logika PLC untuk semua PLC, kecuali PLC kecil. Setelah mikroprosesor konvensional mengalami perbaikan dan pengembangan, PLC yang besar-besar mulai banyak menggunakan-nya. Bagaimanapun juga, hingga saat ini ada yang masih berbasis pada AMD 2903. Kemampuan komunikasi pada PLC mulai muncul pada awalawal tahun 1973. Sistem yang pertama adalah Modbus-nya MODICON. Dengan demikian PLC bisa berkomunikasi dengan PLC lain dan bisa ditempatkan lebih jauh dari lokasi mesin sesungguhnya yang dikontrol. Sekarang kemampuan komunikasi ini dapat digunakan untuk mengirimkan dan menerima berbagai macam tegangan untuk membolehkan dunia analog ikut terlibat. Sayangnya, kurangnya standarisasi mengakibatkan komunikasi PLC menjadi mimpi buruk untuk protokol-protokol dan jaringa-jaringan yang tidak kompatibel. Tetapi bagaimanapun juga, saat itu merupakan tahun yang hebat untuk PLC. pada 6 tahun 1980an dilakukan usaha untuk menstandarisasi komunikasi dengan protokol otomasi pabrik milik General Motor (General Motor's Manufacturring Automation Protocol (MAP)). Juga merupakan waktu untuk memperkecil ukuran PLC dan pembuatan perangkat lunak pemrograman melalui pemgromaman simbolik dengan komputer PC daripada terminal pemrogram atau penggunaan pemrogram genggam (handled programmer). Gambar 2.1 PLC Omron Zen 2.1.1 Pengertian PLC Definisi Programmable Logic Controller menurut Capiel (1982) adalah sistem elektronik yang beroperasi secara digital dan didisain untuk pemakaian di lingkungan industri, dimana sistem ini menggunakan memori yang dapat diprogram untuk penyimpanan secara 7 internal instruksi-instruksi yang mengimplementasikan fungsi-fungsi spesifik seperti logika, urutan, perwaktuan, pencacahan dan operasi aritmatik untuk mengontrol mesin atau proses melalui modul-modul I/O digital maupun analog. Berdasarkan namanya konsep PLC adalah sebagai berikut : 1. Programmable, menunjukkan kemampuan dalam hal memori untuk menyimpan program yang telah dibuat yang dengan mudah diubah-ubah fungsi atau kegunaannya. 2. Logic, menunjukkan kemampuan dalam memproses input secara aritmatik dan logic (ALU), yakni melakukan operasi membandingkan, menjumlahkan, mengalikan, membagi, mengurangi, negasi, AND, OR, dan lain sebagainya. 3. Controller, menunjukkan kemampuan dalam mengontrol dan mengatur proses sehingga menghasilkan output yang diinginkan. 2.1.2 Dasar-dasar Kendali Sistem PLC 2.1.2.1 Pengertian Sistem Kendali Istilah sistem kendali dalam teknik listrik mempunyai arti suatu peralatan atau sekelompok peralatan yang digunakan untuk mengatur fungsi kerja suatu mesin dan memetakan tingkah laku mesin tersebut sesuai dengan yang dikehendaki. Fungsi kerja mesin tersebut mencakup antara lain menjalankan (start), mengatur (regulasi), dan menghentikan suatu proses kerja. Pada umumnya, sistem kendali merupakan suatu kumpulan peralatan listrik atau 8 elektronik, peralatan mekanik, dan peralatan lain yang menjamin stabilitas dan transisi halus serta ketepatan suatu proses kerja. Sistem kendali mempunyai tiga unsur yaitu input, proses, dan output. Gambar 2.2 Unsur-unsur sistem kendali Input pada umumnya berupa sinyal dari sebuah transduser, yaitu alat yang dapat merubah besaran fisik menjadi besaran listrik, misalnya tombol tekan, saklar batas, termostat, dan lain-lain. Transduser memberikan informasi mengenai besaran yang diukur, kemudian informasi ini diproses oleh bagian proses. Bagian proses dapat berupa rangkaian kendali yang menggunakan peralatan yang dirangkai secara listrik, atau juga berupa suatu sistem kendali yang dapat diprogram misalnya PLC. Pemrosesan informasi (sinyal input) menghasilkan sinyal output yang selanjutnya digunakan untuk mengaktifkan aktuator (peralatan output) yang dapat berupa motor listrik, kontaktor, katup selenoid, lampu, dan sebagainya. Dengan peralatan output, besaran listrik diubah kembali menjadi besaran fisik. Sistem kendali dibedakan menjadi dua, yaitu sistem kendali loop terbuka dan sistem kendali loop tertutup, berikut ini penjelasannya : a) Sistem Kendali Loop Terbuka 9 Sistem kendali loop terbuka adalah proses pengendalian di mana variabel input mempengaruhi output yang dihasilkan. Gambar 2.3 menunjukkan diagram blok sistem kendali loop terbuka. Gambar 2.3 Diagram blok sistem kendali loop terbuka Dari gambar di atas, dapat dipahami bahwa tidak ada informasi yang diberikan oleh peralatan output kepada bagian proses sehingga tidak diketahui apakah hasil output sesuai dengan yang dikehendaki. b) Sistem Kendali Loop Tertutup Sistem kendali loop tertutup adalah suatu proses pengendalian di mana variabel yang dikendalikan (output) disensor secara kontinyu, kemudian dibandingkan dengan besaran acuan. Variabel yang dikendalikan dapat berupa hasil pengukuran temperatur, kelembaban, posisi mekanik, kecepatan putaran, dan sebagainya. Hasil pengukuran tersebut diumpan-balikkan ke pembanding (komparator) yang dapat berupa peralatan mekanik, listrik, elektronik, atau pneumatik. Pembanding membandingkan sinyal sensor yang berasal dari variabel yang dikendalikan dengan besaran acuan, dan hasilnya berupa sinyal kesalahan. Selanjutnya, sinyal kesalahan diumpankan kepada peralatan kendali dan diproses untuk 10 memperbaiki kesalahan sehingga menghasilkan output sesuai dengan yang dikehendaki. Dengan kata lain, kesalahan sama dengan nol. Gambar 2.4 Sistem Kendali Loop Tertutup 2.1.2.2 Sistem Kendali PLC Hingga akhir tahun 1970, sistem otomasi mesin dikendalikan oleh relai elektromagnet. Dengan semakin meningkatnya perkembangan teknologi, tugastugas pengendalian dibuat dalam bentuk pengendalian terprogram yang dapat dilakukan antara lain menggunakan PLC (Programmable Logic Controller). Dengan PLC, sinyal dari berbagai peralatan luar diinterfis sehingga fleksibel dalam mewujudkan sistem kendali. Disamping itu, kemampuannya dalam komunikasi jaringan memungkinkan penerapan yang luas dalam berbagai operasi pengendalian sistem. Dalam sistem otomasi, PLC merupakan jantung sistem kendali. Dengan program yang disimpan dalam memori PLC. Dalam eksekusinya, PLC dapat memonitor keadaan sistem melalui sinyal dari peralatan input, kemudian didasarkan atas logika program menentukan rangkaian aksi pengendalian peralatan output luar. 11 PLC dapat digunakan untuk mengendalikan tugas-tugas sederhana yang berulang-ulang, atau di-interkoneksi dengan yang lain menggunakan komputer melalui sejenis jaringan komunikasi untuk mengintegrasikan pengendalian proses yang kompleks. Cara kerja sistem kendali PLC dapat dipahami dengan diagram blok seperti ditunjukkan pada Gambar 2.5.. Gambar 2.5 Diagram blok PLC Sebuah PLC bekerja dengan cara menerima data dari peralatan-peralatan input yang berupa saklar-saklar, tombol-tombol, sensor-sensor dan lain sebagainya, kemudian oleh PLC dibentuk menjadi keputusan-keputusan yang bersifat logika yang selanjutnya disimpan dalam suatu program ingatan. Dengan adanya perubahan dari kondisi input yang kemudian diolah oleh PLC, selanjutnya perintah-perintah dari input akan ditransfer oleh PLC ke output yang kemudian dapat digunakan untuk menggerakkan mesin-mesin atau suatu alur proses produksi. Dari gambar blok diagram di atas, PDT (Program Development Terminal), yang berupa keyboard dilengkapi dengan simbol-simbol perintah untuk 12 melaksanakan, mengedit dan memonitor program-program dari rangkaian control mesin atau alur proses produksi. Program-program rangkaian kontrol yang telah dibentuk pada bagian PDT kemudian ditransfer ke CPU dan selanjutnya akan diolah dan disimpan dalam register memori. Sinyal-sinyal input yang datang dari rangkaian luar akan dikirim ke modul input PLC, yang selanjutnya sinyal tersebut dirubah menjadi sinyalsinyal logic yang kemudian diolah oleh CPU sesuai dengan kondisi program yang telah ditetapkan untuk selanjutnya diteruskan ke output modul untuk menggerakkan mesin-mesin atau proses produksi. Sinyal yang masuk ke input diisolasikan terhadap sinyal yang terjadi di CPU dari pengaruh kejutan-kejutan listrik yang umumnya sering terjadi di lingkungan industri. Jadi untuk lebih jelasnya, fungsi dari komponen-komponen dasar dari blok diagram dari PLC di atas, adalah : 1. Program Development Terminal (PDT) atau sering pula disebut Programming Console, berfungsi untuk memprogram rangkaian kontrol (Ladder Diagram & Statement List) yang dirancang untuk suatu sistem kerja mesin atau suatu alur proses produksi. 2. Central Processing Unit (CPU), berfungsi untuk menyimpan dan mengolah program rangkaian control yang ditransfer dari PDT dan sebagai penghubung ke modul-modul input dan output. CPU juga berfungsi untuk menyelesaikan dan mengolah fungsi-fungsi logika untuk dibentuk menjadi fungsi-fungsi yang diinginkan berdasarkan program-program yang telah ditetapkan. 13 3. Modul input dan modul output berfungsi untuk merubah sinyal-sinyal listrik yang datang dari peralatan luar menjadi besaran tegangan dengan level rendah dan selanjutnya akan diproses oleh CPU menjadi bentuk sinyal dengan level-level tertentu untuk mengontrol peralatan-peralatan atau mesin-mesin di industri. Sinyal yang dating dari modul input dan sinyal-sinyal yang diproses pada CPU diisolasi secara optik terhadap noise-noise listrik. 4. Peralatan input dan output (I/O Device) adalah peralatan-peralatan luar yang dihubungkan ke modul input dan modul output yang dapat berupa saklar-saklar, tombol-tombol tekan, relai-relai, kontaktor-kontaktor, motor-motor starter, solenoidsolenoid dan lain sebagainya. 2.1.3 Fungsi PLC PLC ini dirancang untuk menggantikan suatu rangkaian relay sequensial dalam suatu system kontrol. Selain dapat diprogram, alat ini juga dapat dikendalikan, dan dioperasikan oleh orang yang tidak memiliki pengetahuan di bidang pengoperasian komputer secara khusus. PLC ini memiliki bahasa pemrograman yang mudah dipahami dan dapat dioperasikan bila program yang telah dibuat dengan menggunakan software yang sesuai dengan jenis PLC yang digunakan sudah dimasukkan.Alat ini bekerja berdasarkan input-input yang ada dan tergantung dari keadaan pada suatu waktu tertentu yang kemudian akan meng-ON atau meng-OFF kan output-output. 1 menunjukkan bahwa keadaan yang diharapkan terpenuhi sedangkan 0 berarti keadaan yang diharapkan tidak terpenuhi. PLC juga dapat diterapkan untuk pengendalian sistem yang memiliki 14 output banyak. Fungsi dan kegunaan PLC sangat luas. Dalam prakteknya PLC dapat dibagi secara umum dan secara khusus. Secara umum fungsi PLC adalah sebagai berikut : 1) Sekuensial Control. PLC memproses input sinyal biner menjadi output yang digunakan untuk keperluan pemrosesan teknik secara berurutan (sekuensial), disini PLC menjaga agar semua step atau langkah dalam proses sekuensial berlangsung dalam urutan yang tepat. 2) Monitoring Plant. PLC secara terus menerus memonitor status suatu system (misalnya temperatur, tekanan, tingkat ketinggian) dan mengambil tindakan yang diperlukan sehubungan dengan proses yang dikontrol (misalnya nilai sudah melebihi batas) atau menampilkan pesan tersebut pada operator. 2.1.4 Komponen-komponen PLC PLC terbagi dalam beberapa komponen utama. Untuk memahaminya, perhatikan gambar yang menampilkan hubungan PLC dengan peralatan lain berikut. Gambar 2.6 Hubungan PLC dengan peralatan lain 15 Dari gambar nampak bahwa PLC memiliki komponen yang terhubung dengan input device dan output device. PLC juga terhubung dengan PC untuk kebutuhan pemrograman (umumnya menggunakan RS 232 serial port). Secara umum PLC terbagi dalam beberapa komponen berikut : 1. Power Supply / Catu Daya Power supply atau catu daya merupakan penyedia daya bagi PLC. Range tegangan yang dimilikinya bisa berupa tegangan AC (misal : 120/240 Vac) maupun tegangan DC (misal : 24 V DC). PLC juga memiliki power supply (24V DC) internal yang bisa digunakan untuk menyediakan daya bagi input/output devices PLC. Berikut ini contoh modul power supply dari Omron. Gambar 2.7 Salah satu model Power Supply dari Omron 2. Prosesor / CPU (Central Proccesing Unit) Prosesor ialah bagian PLC yang bertugas membaca dan mengeksekusi instruksi program. Prosesor mempunyai elemen kontrol yang disebut Arithmetic and Logic Unit (ALU), sehingga mampu mengerjakan 16 operasi logika dan aritmetika. Berikut ini contoh modul processor dari Omron. Gambar 2.8 Contoh bentuk fisik CPU dari Omron 3. Memori Memori ialah tempat penyimpanan data dalam PLC. Memori ini umumnya menjadi satu modul dengan processor/CPU. Jika berbentuk memori eksternal maka itu merupakan memori tambahan. Gambar 2.9 Contoh bentuk fisik memori dari Omron 17 Berikut ini data yang tersimpan di memori : 4. a. Operating System PLC b. Status input-output, memori data c. Program yang dibuat pengguna Modul Input-Output Modul input-output ialah perantara dari PLC ke peralatan di dunia nyata. Gambar berikut menunjukkan posisi keduanya. Gambar 2.10 Hubungan Input-Output dengan peralatan Modul input-output pada PLC compact umumnya sudah built-in di PLC. Sedang untuk PLC modular berupa modul I/O tersendiri yang terpisah dari CPU. Secara umum terbagi menjadi : a. Modul input/output diskrit 18 Modul input/output diskrit berfungsi untuk menghubungkan input diskrit fisik (saklar, sensor) dengan PLC. Modul ini tersedia dalam tegangan DC dan AC (umumnya : 240 VAC, 120 VAC, 24 VDC, dan 5 VDC). Di dalamnya terdapat “optoisolator” untuk mencegah lonjakan tegangan tinggi masuk PLC (sebagai pengaman). Berikut ini skema didalam modul input diskrit untuk tegangan DC dan AC. Sebagai catatan, modul input yang dapat menerima tegangan AC memiliki rangkaian penyearah didalamnya. Gambar 2.11 Modul input-output diskrit dengan tegangan DC Gambar 2.12 Modul input diskrit dengan tegangan AC 19 b. Modul output diskrit Modul output diskrit menghubungkan output diskrit fisik (lampu, relay, solenoid, motor) dengan PLC. Jenis- jenis Digital Output Module ialah : Triac output (output tegangan AC) Transistor output (output tegangan DC) Relay output (output tegangan AC/DC) Gambar 2.13 Macam-macam modul output diskrit c. Modul Input / Output Analog Selain modul input/output diskrit, terdapat juga modul input/output analog. Modul input analog dapat menerima tegangan dan arus dengan level tertentu (misal 0 – 10 V, 4 – 20 mA) dari peralatan input analog 20 (misal : sensor analog, potensiometer). Sedang modul output analog dapat memberikan tegangn dan arus dengan level tertentu (misal 0 – 10 V, 4 – 20 mA) pada outpu device analog (misal : motor DC, motor AC, control valve). Gambar 2.14 Modul input / output analog 5. Alat Pemograman Alat pemograman ialah alat untuk membuat atau mengedit program PLC. Pada mulanya berupa hand held programmer seperti gambar 2.15 di bawah. Keuntungannya ialah dapat dibawa ke mana saja karena bentuknya kecil, namun alat ini sulit untuk melihat program secara keseluruhan karena yang ditampilkan ialah program per baris saja. 21 Gambar 2.15 Hand held programmer dari PLC Allen Bradley Dengan perkembangan komputer yang cepat, dan disertai ukurannya yang semakin mengecil, maka PC atau laptop jauh lebih sering digunakan sekarang ini. PC terhubung dengan PLC melalui programming port (umumnya RS 232). 2.2 Pengenalan Perangkat Kontrol dan Pengaman Lainnya 2.2.1 Relay Relay adalah suatu peranti yang menggunakan elektromagnet untuk mengoperasikan seperangkat kontak saklar. Susunan paling sederhana terdiri dari kumparan kawat penghantar yang dililit pada inti besi (koil). Bila kumparan ini dienergikan, medan magnet yang terbentuk menarik armatur berporos yang digunakan sebagai pengungkit mekanisme sakelar. Sebagai komponen dalam suatu rangkaian listrik, relay mempunyai peran penting untuk menggerakan sebuah perangkat yang memerlukan arus besar tanpa 22 terhubung langsung dengan perangkat pengendali yang mempunyai arus kecil, dengan demikian relay dapat berfungsi pula sebagai pengaman. Gambar 2.16 Bentuk relai yang banyak dipasaran Secara umum relai digunakan untuk memenuhi fungsi-fungsi sebagai berikut : a. Remote Control : dapat menyalakan atau mematikan alat dari jarak jauh. b. Penguatan Daya : menguatkan arus atau tegangan, contoh : starting relay pada mesin diesel atau genset. c. Pengontrol logika kontrol suatu sistem. 2.2.1.1 Prinsip Kerja dan Simbol Relai terdiri dari coil dan contact (lihat gambar 2.17), coil adalah kumparan yang berupa gulungan kawat yang mendapat arus listrik, sedang contact adalah sejenis saklar yang pergerakannya ada atau tidaknya arus listrik di coil. Contact ada dua jenis, yaitu : a. Normally Open : yaitu kondisi awal sebelum diaktifkan berada pada posisi terbuka. b. Normally Closed : yaitu kondisi awal sebelum diaktifkan berada pada posisi tertutup. 23 Secara sederhana prinsip kerja relai adalah ketika coil mendapat energi listrik (energized), akan timbul gaya elektromagnet yang akan menarik armature yang berpegas, dan contact akan menutup. Gambar 2.17 Skema relay Selain berfungsi sebagai komponen elektronik relay juga berfungsi sebagai pengendali sistem, sehingga relai mempunyai dua macam symbol yang digunkan pada rangkaian listrik (hardware) dan program (software). (a) Simbol pada rangkaian listrik. (b) simbol pada program Gambar 2.18 Rangkaian dan simbol logika relay 24 Tabel 2.1 Contoh Data Koil Relai LY Omron Tabel 2.2 Contoh Data Kontak Relai LY Omron Sumber : OMRON, General Purpose Relay LY Specifications 25 2.2.1.2 Jenis-jenis Relay Seperti saklar, relay juga dibedakan berdasar pole dan throw yang dimilikinya. Berikut adalah definisi pole dan throw: a. Pole adalah banyaknya contact yang dimiliki relay b. Throw adalah banyaknya kondisi (state) yang mungkin dimiliki contact. Berikut ini penggolongan relay berdasar jumlah pole dan throw: a. SPST (Single Pole Single Throw) : Relay ini memiliki empat terminal. Dua terminal kumparan (coil) dan dua terminal saklar (A dan B) yang dapat terhubung dan terputus. b. DPST (Double Pole Single Throw) : Relay ini mempunyai enam terminal. Dua terminal kumparan (coil), dan empat terminal merupakan dua pasang saklar yang dapat terhubung dan terputus (A1 dan B1 - A2 dan B2). c. SPDT (Single Pole Double Throw) : Relay ini memiliki lima terminal. Dua terminal kumparan (coil) dan tiga terminal saklar (A,B, dan C) yang dapat terhubung dan terputus dengan satu terminal pusat. Jika suatu saat terminal A terputus dengan terminal pusat (C) maka terminal lain (B) terhubung dengan terminal C, demikian juga sebaliknya. d. DPDT (Double Pole Double Throw) : Relay ini mempunyai delapan terminal. Dua terminal kumparan (coil), enam terminal merupakan dua set saklar yang dapat terputus dan terhubung (A1,B1,C1 dan A2, B2, C2) 26 e. 3PDT (Three Pole Double Throw) : Relay ini mempunyai delapan terminal. Dua terminal kumparan (coil), sembilan terminal merupakan tiga set saklar yang dapat terputus dan terhubung. f. 4PDT (Four Pole Double Throw) : Relay ini mempunyai delapan terminal. Dua terminal kumparan (coil), 12 terminal merupakan empat set saklar yang dapat terputus dan terhubung. Gambar 2.19 Rangkain Jenis Relay 2.2.2 Kontaktor Kontaktor adalah sejenis saklar atau kontak yang bekerja dengan bantuan daya magnet listrik dan mampu melayani arus beban listrik yang relatif besar. Kontaktor magnit adalah saklar yang bekerja berdasarkan elektromagnetis digunakan untuk membuka dan menyambung rangkaian listrik . Kontaktor magnit bekerja untuk merubah kontak-kontak Normally Open (NO) dan Normally Close (NC). 27 Gambar 2.20 Simbol Kontak dan Koil pada Kontaktor Prinsip kerja kontaktor adalah apabila kumparan (coil) mendapatkan tegangan listrik atau diberi arus, maka arus yang mengalir didalam kumparan akan menghasilkan fluk yang mengalir dalam inti. Beda kutub yang terjadi antara jangkar dan inti besi mengakibatkan jangkar dan inti besi tarik menarik. Pada waktu jangkar tertarik oleh inti besi maka kontak akan beroperasi. Bila tegangan kumparan dilepas, maka daya magnet akan hilang dan jangkar akan kembali pada posisi semula karena dorongan pegas dengan sendirinya unit kontak juga akan kembali pada posisi normal baik menghubung atau memutus. 28 Gambar 2.21 Struktur Kontaktor 29 Gambar 2.22 Kontaktor yang umum berada dipasaran 2.2.3 MCB (Miniature Circuit Breaker) MCB adalah suatu peralatan pemutus rangkaian listrik pada suatu sistem tenaga listrik, yang mampu untuk membuka dan menutup rangkaian listrik pada semua kondisi, termasuk arus hubung singkat, sesuai dengan ratingnya. Juga pada kondisi tegangan yang normal ataupun tidak normal. Miniature Circuit Breaker (MCB) di desain dengan fungsi utama untuk : a. mengamankan kabel terhadap beban lebih dan arus hubung singkat. b. melewatkan arus tanpa pemanasan lebih. c. membuka dan menutup sebuah sirkit di bawah arus pengenal. Pemilihan MCB ditentukan oleh beberapa hal, antara lain : 1. Standar SPLN 108 / SLI 175, bila digunakan oleh pemakai umum (instalasi perumahan kapasitas pemutusan rendah) 30 IEC 60947-2, bila digunakan oleh ahlinya (aplikasi industri - kapasitas pemutusan tinggi) 2. Kapasitas pemutusan Kapasitas pemutusan suatu pemutus tenaga harus lebih besar dari arus hubung singkat pada titikinstalasi di mana pemutus tenaga tersebut dipasang. Pada diagram garis suatu sistem, disarankan untuk juga menyebutkan besar kapasitas pemutusan di samping arus pengenal pemutus tenaga yang digunakan. 3. Arus Pengenal Arus pengenal pemutus tenaga harus disesuaikan dengan besarnya arus beban yang dilewatkan kabel dan lebih kecil dari arus yang diijinkan pada kabel. 4. Tegangan Tegangan operasional pengenal pemutus tenaga harus lebih besar atau sama dengan tegangan sistem. 5. Jumlah kutub 6. Bentuk kurva trip (Kurva C atau Kurva D) Menentukan besar magnetis trip terhadap arus pengenal. 7. Frekuensi sistem 8. Aplikasi beban Tipe kabel yang diamankan, tembaga atau alumunium. 31 Gambar 2.23 Jenis MCB Gambar 2.24 Kontruksi MCB 32 2.2.4 Sakelar Tekan (Push Button) Sakelar Tekan banyak digunakan pada rangkaian kontrol/kendali untuk mengoperasikan dan sebagai penghubung atau pemutus. Ada dua jenis sakelar tekan yaitu jenis terkunci dan jenis tidak terkunci. Jenis sakelar tekan terkunci, kontaknya akan tetap terbuka atau terhubung setelah tombol ditekan. Kontak akan kembali pada posisi normal setelah tombol ditekan kembali. Jenis sakelar tekan tidak terkunci, kontaknya akan terbuka atau terhubung pada saat sakelar ditekan saja dan setelah tekanan dilepas maka kontak akan kembali segera pada posisi semula atau normal. a). sakelar tekan tunggal b). sakelar tekan ganda Gambar 2.25 Simbol (a, b) dan jenis sakelar tekan 33 2.2.5 Sakelar Putar/Pemilih (Selector Switch) Saklar pemilih ini menyediakan beberapa posisi kondisi on dan kondisi off, ada dua, tiga, empat bahkan lebih pilihan posisi, dengan berbagai tipe geser maupun putar. Saklar pemilih biasanya dipasang pada panel kontrol untuk memilih jenis operasi yang berbeda, dengan rangkaian yang berbeda pula. Saklar pemilih memiliki beberapa kontak dan setiap kontak dihubungkan oleh kabel menuju rangkaian yang berbeda, misal untuk rangkaian putaran motor cepat dan untuk rangkaian putaran motor lambat. Gambar 2.26 Jenis-jenis Sakelar Pemilih 34 2.2.6 Module Controller (Modul Pengontrol) Modul Pengontrol merupakan suatu perangkat pengembangan Programmable Logic Controller (PLC) dan Microcontroller dengan memberikan fungsi-fungsi siap pakai sehingga memudahkan dalam pembuatan kontrol untuk menjalankan sebuah sistem proteksi dan start-stop genset. Modul ini tercipta guna bertujuan untuk menggantikan logika dan pengerjaan sirkuit kontrol relay yang masih bersifat konvensional atau masih menggunakan banyak relay. Penggunaan modul pengontrol ini jauh lebih ekonomis dibandingan dengan menggunakan PLC. Dengan penggunaan modul ini proses kerja sistem dapat disimulasikan secara software maupun melalui modul itu sendiri. Modul ini juga dilengkapi dengan fungsi SMS (Short Message Service). Ketika genset mengkhawatirkan, pengontrol dapat mengirim pesan singkat melalui SMS secara otomatis ke maksimal 5 nomor telepon. Selain itu, status generator dapat dikontrol dan diperiksa menggunakan SMS. Beberapa keunggulan yang dapat dicapai dengan menggunakan modul pengontrol adalah : a. Sangat mudah dalam mengimplementasikan dengan waktu yang relatif efisien. b. Fleksibel dan handal. c. Mudah dalam konfigurasi dan komunikasi. d. Status sistem dapat termonitor. e. Ekonomis 35 Terdapat beberapa tipe dan jenis modul pengontrol yang beredar di Indonesia, salah satunya yang dipakai dalam rancang bangun yang penulis buat ini adalah seperti gambar dibawah ini : Gambar 2.27 Tampak Muka dari Modul Pengontrol Tipe : HGM7210 Dibawah ini adalah diagram aplikasinya : Gambar 2.28 Diagram Modul Pengontrol Type HGM7210 36 2.2.7 Battery Charger (Pengisi Baterai) Sesuai dengan namanya, Battery Charger (Pengisi Baterai) ini adalah suatu peranti digunakan untuk memasukkan energi listrik ke acuu. Pada umumnya nilai energi yang dimasukkan ke aki adalah 12 V atau 24 V. Berdasarkan cara kerjanya, battery charger ini mendapat suplai energi dari sumber listrik utama atau PLN yang kemudian dikonversi keluarannya menjadi 12 atau 24 V Battery Charger digunakan untuk menyuplai energi listrik ke accu. Dalam sistem ATS-AMF, battery charger mendapatan dapat suplai masukan dari PLN dan menyuplai keluar ke accu, apabila PLN dalam keadaan normal dan akan terputus pada saat genset bekerja. Accu yang digunakan oleh mesin diesel pada genset harus dalam keadaan baik dengan tegangan dan arus yang normal, oleh karena itu diperlukan battery charger untuk menjaga agar kondisi accu tetap stabil. Pada umumnya suplai keluaran battery charger adalah 12 VDC atau 24 VDC. Gambar 2.29 Contoh bentuk fisik Battery Charger 37 2.2.8 Modem Modem berasal dari singkatan Modulator Demodulator. Modulator merupakan bagian yang mengubah sinyal informasi ke dalam sinyal pembawa (carrier) dan siap untuk dikirimkan, sedangkan Demodulator adalah bagian yang memisahkan sinyal informasi (yang berisi data atau pesan) dari sinyal pembawa yang diterima sehingga informasi tersebut dapat diterima dengan baik. Modem merupakan penggabungan keduaduanya, artinya modem adalah alat komunikasi dua arah. Setiap perangkat komunikasi jarak jauh dua-arah umumnya menggunakan bagian yang disebut "modem", seperti VSAT, Microwave Radio, dan lain sebagainya, namun umumnya istilah modem lebih dikenal sebagai Perangkat keras yang sering digunakan untuk komunikasi pada komputer. Data dari komputer yang berbentuk sinyal digital diberikan kepada modem untuk diubah menjadi sinyal analog, ketika modem menerima data dari luar berupa sinyal analog, modem mengubahnya kembali ke sinyal digital supaya dapat diproses lebih lanjut oleh komputer. Sinyal analog tersebut dapat dikirimkan melalui beberapa media telekomunikasi seperti telepon dan radio. Setibanya di modem tujuan, sinyal analog tersebut diubah menjadi sinyal digital kembali dan dikirimkan kepada komputer atau perangkat lainnya seperti modul pengontrol dan PLC. Terdapat dua jenis modem secara fisiknya, yaitu modem eksternal dan modem internal. 38 Sebagai penunjang sistem pada Tugas Akhir ini, penulis akan menggunakan Modem GSM buatan Smartgen Technology Co. Ltd dengan type GSM-2/3. Berikut ini spesifikasi teknisnya : a. Power Supply : +5 - 35VDC b. Antenna Interface : 50O/SMA (cathode) c. SIM : 1.8/3V, Deteksi Otomatis d. Maksimal Konsumsi Power : 2W pada frekwensi 900 MHz dan 1W pada frekwensi 1800 MHz. e. RS-232 Interface : DB15 f. Dimensi (mm) : 88 x 60 x 26 mm. g. Berat : 100 g h. Temperatur Kerja : -20 ºC sampai dengan +55ºC i. Temperatur Penyimpanan : -25ºC sampai dengan +70ºC j. Kelembaban : 95% (tanpa kondensasi) Gambar 2.30 Bentuk fisik Modem GSM 2/3 buatan Smartgen 39 Gambar 2.31 Diagram instalasi Modem GSM 2/3 40