PENGKONDISI SINYAL ANALOG
advertisement

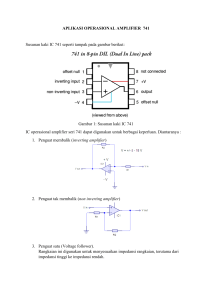
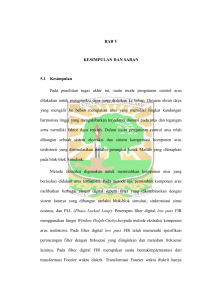
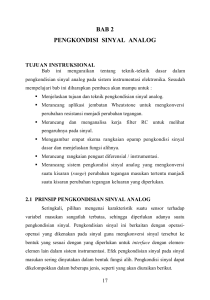
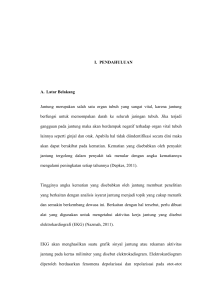
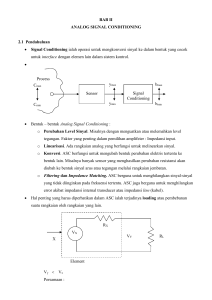
TUJUAN Setelah menyelesaikan perkuliahan ini peserta mampu: • Menggunakan rumus-rumus dalam rangkaian elektronika untuk menganalisis rangkaian pengkondisi sinyal pasif • Menggunakan kaidah, hukum, dan rumus dalam rangkaian elektronika untuk merancang rangkaian pengkondisi sinyal pasif POKOK BAHASAN • Prinsip Pengkondisian Sinyal • Rangkaian Pasif • Operational Amplifier (Op amp) • Panduan Perancangan • Tugas. PRINSIP PENGKONDISIAN SINYAL • Pengubahan Level Sinyal • Linierisasi • Konversi • Filter dan Penyesuaian Impedansi • Konsep Pembebanan. Pengubahan Level Sinyal • Penguatan • Peredaman Pertimbangan dalam pemilihan penguat: • Impedansi masukan yang ditawarkan kepada sensor (atau elemen lain yang berfungsi sebagai masukan) • Tanggapan frekuensi penguat. Linierisasi • Tujuan: untuk mendapatkan keluaran yang berubah secara linier terhadap variabel masukan meskipun keluaran sensornya tidak linier • Rangkaian linierisasi sulit dirancang, dan biasanya bekerja hanya dalam batas yang sempit • Cara linierisasi alternatif: secara perangkat lunak. Konversi • Untuk mengkonversi suatu jenis perubahan listrik ke jenis perubahan listrik yang lain • Transmisi Sinyal: konversi tegangan ke arus. Standard: 4 sampai 20 mA • Interface Digital: konversi sinyal analog ke data digital (ADC). Biasanya memerlukan pengaturan level sinyal analog agar sesuai dengan masukan yang diperlukan oleh ADC. Filter dan Penyesuai Impedansi • Sinyal yang diperlukan sering bercampur dengan sinyal yang tidak diinginkan (noise). Perlu filter yang sesuai, yaitu LPF,HPF, notch filter, atau gabungan dari filter-filter tersebut • Penyesuaian impedansi kadang diperlukan, yaitu apabila impedansi internal transduser atau impedansi saluran dapat menyebabkan terjadinya suatu kesalahan dalam pengukuran suatu variabel. Contoh 2.1 • Sebuah penguat mengeluarkan tegangan sepuluh kali tegangan terminal masukannya, dan mempunyai resistansi masukan sebesar 10 kW. Sebuah sensor mengeluarkan tegangan yang sebanding suhu dengan fungsi alih 20 mV/oC. Sensor tersebut mempunyai resistansi keluaran sebesar 5 kW. Apaila suhu yang diukur sebesar 50 oC, berapakah tegangan keluaran penguat tersebut ? Penyelesaian T 20 mV/oC VT Vin Gain = 10 • Tegangan sensor dalam keadaan tanpa beban diperoleh dari fungsi alih : Vo VT 20mV / C 50 C 1,0V o o Tegangan keluaran penguat : Vo 10Vin 10 1,0V 10V Konsep Pembebanan • Adanya pengaruh pembebanan pada suatu rangkaian oleh rangkaian lain dapat menyebabkan terjadinya ketidakpastian dalam amplituda tegangan. Rx x Vx Vy RL Rx Rx Vx 1 V y Vx Vx RL Rx RL Rx RL (2.1) Vx RL Rx dengan : Vy = tegangan beban Vx = tegangan sensor dengan rangkaian terbuka Rx = impedansi internal sensor RL = impedansi beban. Lanjutan Contoh 2.1 T 5k VT Vin 10 k • Tegangan yang sebenarnya muncul pada terminal Vo masukan penguat adalah : Gain = 10 10 kW Vin VT 0,67 V 10kW 5kW dengan Vin = 0,67 V maka besarnya tegangan keluaran penguat adalah : Vo 10 0,67V 6,7V . RANGKAIAN PASIF • Rangkaian Pembagi Tegangan • Rangkaian Jembatan • Filter RC. Rangkaian Pembagi Tegangan Vs R1 VD • Rangkaian pembagi tegangan digunakan untuk mengkonversi perubahan resistansi menjadi perubahan tegangan R2 R2 VS VD R1 R2 (2.2) (PR) dengan : VS = tegangan catu R1, R2 = resistansi pembagi tegangan. Karakteristik Rangkaian Pembagi Tegangan: • • • Perubahan VD terhadap R1 maupun R2 tidaklah linier Impedansi keluaran efektif rangkaian adalah kombinasi paralel R1 dan R2 Karena arus mengalir melalui kedua resistor, maka rating daya resistor maupun sensor harus diperhatikan. Rangkaian Jembatan Wheatstone • Rangkaian jembatan digunakan untuk mengkonversi perubahan impedansi menjadi perubahan tegangan, terutama untuk fraksi perubahan yang kecil • Keluarannya dapat dibuat berubah di sekitar nol, sehingga penguatan dapat digunakan untuk memperbesar level sinyal (guna meningkatkan sensitivitas terhadap perubahan impedansi). V Va Vb (2.3) • dengan : Va = potensial titik a terhadap titik c • Vb = potensial titik b terhadap titik c VR3 Va R1 R3 (2.4) VR4 Vb R2 R4 (2.5) VR3 R3 R2 R1 R4 VR4 V V (2.7) R1 R3 R2 R4 ( R1 R3 )( R2 R4 ) V akan sama dengan nol (setimbang) bila: R3 R2 R1R4 (2.8). Filter RC • Filter RC Lolos rendah (LPF) • Filter RC Lolos Tinggi (HPF) • Contoh Perancangan • Pertimbangan Praktis. Filter RC lolos rendah (LPF) • Perbandingan tegangan keluaran dan masukan: R Vi C Vo Vo 1 1 2 Vi f 2 1 f C (____ 2.12) (PR) fC = frekuensi kritis, yaitu frekuensi dimana perbandingan antara tegangan keluaran dan tegangan masukan sama dengan 0,707: 1 fC 2 RC (_____ 2.13) (PR). Tanggapan LPF Filter RC Lolos Tinggi (HPF) • Perbandingan antara tegangan keluaran dan masukan: C Vi R Vo VO f / fC 2 1/ 2 Vi 1 f / fC Tanggapan HPF: (______ 2.14) (PR) Contoh 2.1 • Pulsa untuk sebuah motor step dikirimkan pada frekuensi 2000 Hz. Pulsa ini mengandung noise dengan frekuensi 60 Hz. Rancanglah sebuah filter yang meredam frekuensi noise 60 Hz, tetapi redamannya terhadap pulsa-pulsa untuk motor step tidak boleh melebihi 3 dB. Penyelesaian Contoh 2.1 P(dB) = 20 log (Vo/Vi) (PR) Redaman 3 dB pada pulsa berarti bahwa P = -3 dB. Oleh karena itu , P(dB) = 20 log (Vo/Vi) = -3 Vo/Vi = 10-3/20 = 0,707 Dari Persamaan 2.14, untuk frekuensi f = 2000 Hz: VO f / fC 0,707 1 / 2 2 Vi 1 f / fC 2000 / f C 2 1/ 2 1 2000 / fC f C 2000 Hz 0,707 • Misalkan C = 0,01 mF, maka dengan menggunakan Persamaan (2.13): 1 2000 2 R (0,0110 6 ) R 7,957 kW Jadi dengan nilai C sebesar 0,01 mF maka nilai R yang diperlukan adalah sebesar 7,957 kW. • Pengaruh filter pada noise 60 Hz diperoleh dengan menggunakan Persamaan (2.14), untuk frekuensi f = 60 Hz VO / Vi 60 / 2000 2 1/ 2 1 60 / 2000 0,03 Jadi, dapat dilihat bahwa hanya 3 % dari noise 60 Hz yang tersisa, dengan kata lain telah teredam sebesar 97 %. Contoh 2.2 • Suatu sinyal pengukuran mempunyai frekuensi < 1kHz, dan mengandung noise dengan frekuensi 1 MHz • Rancanglah sebuah filter yang meredam noise tersebut menjadi 1 % • Bagaimana pengaruh filter tersebut terhadap sinyal pengukuran pada frekuensi maksimumnya (1 kHz). Penyelesaian Contoh 2.2 • Dengan menggunakan Persamaan (2.12) diperoleh frekuensi kritis sebagai berikut : 0,01 1 1 1MHz fC 2 12 f C 10 kHz Misalkan digunakan C = 0,01 mF, maka diperoleh : 1 R 1,59 kW 2 0,01mF 10kHz • Untuk melihat pengaruh filter terhadap sinyal 1 kHz, dapat digunakan Persamaan (2.12) : VO 1 2 Vi 1 0,1 1/ 2 0,995 Jadi sinyal pengukuran pada frekuensi maksimumnya hanya teredam sebesar 0,5 %. Pertimbangan Praktis Untuk merancang filter, perlu diperhatikan : • Setelah frekuensi kritis ditentukan, nilai-nilai R dan C dapat dipilih yang memenuhi Persamaan (2.13) dengan memperhatikan : – Hindari pemilihan nilai resistansi yang terlalu kecil / kapasitor yang terlalu besar karena akan menarik arus yang besar. Pada umumnya digunakan resistansi dalam kisaran kW ke atas, dan kapasitor dalam kisaran mF ke bawah – Seringkali nilai frekuensi kritis yang eksak tidaklah penting, tetapi jika memang diperlukan eksak, biasanya lebih mudah memilih kapasitor lebih dulu baru kemudian resistansinya disesuaikan dengan menggunakan resistor trimmer. Pertimbangan Praktis • Impedansi masukan dan keluaran efektif filter ada kemungkinan berpengaruh terhadap rangkaian sebelum dan sesudah rangkaian filter. Karena itu bilamana perlu dapat digunakan suatu pengikut tegangan • Dua filter dengan frekuensi kritis yang sama dapat dikaskade untuk meningkatkan ketajaman tanggapan, dengan memperhatikan bahwa impedansi keluaran filter pertama harus jauh lebih kecil dibanding impedansi masukan filter kedua, guna menghindari pengaruh pembebanan. TUGAS 2 • Buktikan / turunkan persamaan-persamaan yang diberi tanda (PR) . • Kerjakan dengan ditulis tangan, dikumpulkan pada pertemuan berikutnya.