Bab II Tinjauan Pustaka
advertisement

Bab II
Tinjauan Pustaka
II.1 Fluida
Fluida adalah zat-zat yang mampu mengalir dan menyesuaikan diri dengan bentuk
wadahnya. Bila berada dalam keseimbangan, fluida tidak dapat menahan gaya
tangensial atau gaya geser. Semua fluida memiliki derajat kompresibilitas dan
memberikan tahanan kecil terhadap perubahan bentuk (Giles, 1984).
Fluida dapat digolongkan ke dalam cairan atau gas. Perbedaan utama antara cairan
dan gas adalah cairan praktis tak kompresibel, sedangkan gas kompresibel dan
sering kali harus diperlakukan demikian; dan cairan mengisi volume tertentu dan
mempunyai permukaan-permukaan bebas sedangkan gas dengan massa tertentu
mengembang sampai mengisi seluruh bagian wadah tempatnya (Giles, 1984).
Sifat-sifat fluida yang terutama dijadikan pertimbangan dalam simulasi distribusi
air adalah berat spesifik, viskositas cairan, dan kompresibilitas.
II.1.1 Densitas dan Berat Spesifik
Densitas atau rapat massa ( ρ ) suatu fluida didefinisikan sebagai massa fluida per
volume satuan. Densitas air pada tekanan standar 1 atm (1.013 bar) dan
temperatur standar 32.0°F (0.0°C) adalah 1.94 slugs/ft3 (1000 kg/m3). Perubahan
pada temperatur dan tekanan akan mempengaruhi densitas, walaupun dalam
pemodelan sistem distribusi air hal tersebut dapat diabaikan karena perubahannya
sangat kecil, terutama untuk daerah beriklim tropis. Berat spesifik atau berat jenis
( γ ) suatu zat adalah berat zat per volume satuan.
γ = ρ .g
dimana:
(II.1)
γ = berat spesifik fluida (M/L2/T2)
ρ = densitas fluida (M/L3)
g = percepatan gravitasi (L/T2)
Berat jenis air pada tekanan dan temperatur standar yaitu 62.4 lb/ft3 (9,806 N/m3).
6
II.1.2 Viskositas
Viskositas fluida merupakan kemampuan suatu fluida untuk bertahan terhadap
perubahan bentuk yang diakibatkan oleh adanya tegangan geser. Hukum
viskositas Newton menyatakan bahwa untuk laju perubahan bentuk sudut fluida
yang tertentu maka tegangan geser berbanding lurus dengan viskositas. Fluida
yang memperlihatkan sifat sesuai dengan Hukum viskositas Newton disebut
sebagai fluida Newton. Dalam fluida Newton terdapat hubungan linear antara
besarnya tegangan geser yang diterapkan dan laju perubahan bentuk yang
diakibatkan. Contoh fluida Newton adalah air dan gas. Karena sebagian besar
model distribusi yang dikembangkan untuk mensimulasi air, maka persamaan
yang digunakan hanya mempertimbangkan fluida Newton (Walski et al, 2002).
Viskositas merupakan fungsi dari temperatur, tetapi hubungannya berbeda antara
cairan dan gas. Viskositas gas meningkat dengan suhu, tetapi viskositas cairan
berkurang dengan naiknya suhu. Variasi temperatur dalam sistem distribusi air
biasanya kecil sehingga perubahan dalam viskositas air dapat diabaikan.
Umumnya pada pemodelan sistem distribusi air, viskositas dianggap konstan
(Walski et al, 2002).
Pada hidrolika perpipaan juga terjadi tegangan geser antara dinding pipa dan
fluida yang bergerak di dalam pipa. Semakin besar viskositas fluida, semakin
besar kehilangan energi akibat friksi sepanjang pipa tersebut. Pada beberapa
perangkat lunak pemodelan sistem distribusi air, viskositas merupakan parameter
penting untuk menentukan koefisien friksi sepanjang pipa (Walski et al, 2002).
II.1.3 Kompresibilitas Fluida
Untuk kebanyakan keperluan praktis maka cairan dapat dianggap tak kompresibel,
tetapi dalam situasi yang menyangkut perubahan tekanan yang mendadak atau
perubahan tekanan yang besar maka kompresibilitasnya menjadi sangat penting.
Pada dasarnya, semua fluida, termasuk air, kompresibel atau mampu mampat.
Guna memperoleh gambaran mengenai kompresibilitas air, pemberian tekanan 0,1
7
MPa (± 1 atm) untuk satu meter kubik air pada 20°C ( Ev =2,2 GPa) akan
menyebabkan pengurangan volume ± 45,5 cm3(Streeter & Wylie, 1999).
Efek pemampatan dalam sistem distribusi air minum sangat kecil. Oleh karena itu,
persamaan yang digunakan dalam simulasi hidrolis didasarkan pada asumsi bahwa
cairannya bersifat tak kompresibel (Walski et al, 2002).
II.1.4 Tekanan Statis Fluida
Tekanan adalah suatu gaya normal, tegak lurus terhadap bidang, yang bekerja
pada suatu bidang. Satuan tekanan dalam Sistem Internasional (SI) adalah N/m2
atau Pascal, sedangkan dalam sistem satuan Inggris adalah pounds per square foot
(lb/ft2) dan pounds per square inch (lb/in2),disingkat psi (Walski et al, 2002).
Tekanan hidrostatis pada suatu datum disebabkan oleh berat fluida di atas datum
tersebut. Berat atmosfer bumi juga menghasilkan suatu tekanan yang disebut
tekanan atmosfer. Tekanan atmosfer standar adalah tekanan rata-rata pada
permukaan laut, besarnya 1 atm (14.7 psi atau 101 kPa atau 760 mmHg). Dua
jenis tekanan yang biasa digunakan dalam hidrolika adalah tekanan absolut dan
tekanan relatif. Tekanan absolut adalah tekanan terukur dengan nol absolut
(vakum sempurna) sebagai datum. Sedangkan, tekanan relatif adalah tekanan
terukur dengan tekanan atmosfer sebagai datum. Hubungan antara keduanya dapat
dilihat dari persamaan berikut:
Pabs = Prelatif + Patm
dimana:
Pabs
(II.2)
= tekanan absolut (M/L/T2)
Prelatif = tekanan relatif (M/L/T2)
Patm
= tekanan atmosfer (M/L/T2)
Dalam kebanyakan aplikasi hidrolika, termasuk analisis sistem distribusi air,
tekanan relatif lebih sering digunakan karena lebih mudah diukur. Jika tekanan
relatif diukur pada permukaan bumi yang terbuka dengan atmosfer maka dalam
pengukuran menunjukkan bahwa tekanannya bernilai nol. Tekanan relatif yang
8
bernilai negatif (tekanannya di bawah tekanan atmosfer lokal) disebut sebagai
negative pressure atau vakum (Walski et al, 2002).
II.1.5 Kecepatan dan Rezim Aliran
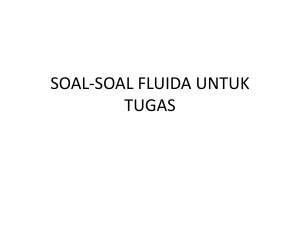
Profil kecepatan suatu aliran fluida melalui pipa tidak konstan sepanjang
diameternya. Melainkan, kecepatan partikel fluida tersebut tergantung pada lokasi
partikel tersebut berada dari dinding pipa. Gambar II.1 memperlihatkan variasi
kecepatan fluida di dalam pipa. Dalam banyak kasus, model-model hidrolik
menggunakan kecepatan rata-rata, yang dirumuskan:
V=
dimana:
Q
A
(II.3)
V = kecepatan rata-rata fluida (L/T)
3
Q = laju alir atau debit (L /T)
A = luas penampang pipa (L2)
Untuk pipa berbentuk lingkaran dengan luas penampang, A = ¼πD2, persamaan
II.3 dapat ditulis menjadi:
V=
dimana:
4Q
πD 2
(II.4)
D = diameter pipa (L)
Gambar II.1 Profil kecepatan pada berbagai aliran
Sumber: Walski et al, 2002
Dari Gambar II.1, suatu aliran dengan kecepatan yang seragam memiliki profil
kecepatan yang sama sepanjang diameternya. Pada aliran laminer, partikel fluida
bergerak di sepanjang lintasan lurus dan sejajar dalam lapisan atau lamina,
9
menghasilkan tegangan geser yang sangat besar di antara lapisan yang berdekatan.
Secara matematis, profil kecepatan aliran laminer berbentuk seperti parabola.
Pada aliran laminer, faktor utama yang menyebabkan headloss pada sebuah
segmen pipa adalah viskositas fluida tersebut, bukan kekasaran pipa.
Dalam aliran turbulen, partikel fluida bergerak dalam lintasan-lintasan yang
sangat tidak teratur sehingga mengakibatkan pertukaran momentum dari satu
bagian fluida ke bagian lainnya. Bentuk profil kecepatan dari aliran turbulen lebih
tidak teratur dibandingkan dengan profil kecepatan aliran laminer.
Bilangan Reynolds merupakan suatu bilangan tak berdimensi yang digunakan
untuk mengkarakterisasi rezim suatu aliran. Bilangan Reynolds didefinisikan
sebagai rasio antara gaya inersi terhadap viskositas. Bilangan Reynolds untuk pipa
berbentuk lingkaran dapat dihitung dengan rumus:
Re =
dimana:
VDρ
(II.5)
μ
Re = Bilangan Reynolds
D = diameter pipa (L)
ρ = densitas fluida (M/L3)
μ = viskositas absolut (M/L/T)
υ = viskositas kinematik (L2/T)
Rentang bilangan Reynolds yang menunjukkan jenis-jenis rezim aliran dapat
dilihat pada Tabel II.1. Aliran air dalam suatu sistem distribusi air minum
biasanya selalu turbulen, kecuali pada kondisi permintaan airnya rendah atau
intermitten maka bisa saja alirannya laminer (Walski et al, 2002).
Tabel II.1 Bilangan Reynolds untuk Berbagai Rezim Aliran
Rezim Aliran Bilangan Reynolds
Laminer
< 2000
Transisi
2000 – 4000
Turbulen
> 4000
Sumber: Walski et al, 2002
10
II.2 Hidrolika Jaringan Pipa
Hidrolika adalah studi mengenai liquid yang bergerak atau liquid yang diberi
tekanan. Pemahaman akan hidrolika sangat diperlukan untuk mengeksplorasi
sistem distribusi air (AWWA, 1976).
II.2.1 Persamaan Kontinuitas
Persamaan kontinuitas pada dasarnya sama dengan konsep kekekalan massa
dimana massa yang masuk dikurangi massa yang keluar sama dengan massa yang
tertinggal. Persamaannya dapat ditulis (Walski, 1984):
min − mout = mstorage
dimana:
min
= massa yang masuk (M)
mout
= massa yang keluar (M)
m storage
= massa yang tersimpan (M)
(II.6)
Dengan menganggap air sebagai fluida yang tak mampu mampat, maka jika
persamaan di atas dibagi dengan densitas ( ρ ) dan waktu (t), diperoleh
persamaan:
Qin − Qout = ΔS Δt
dimana:
Qin
= debit yang masuk (M)
Qout
= debit yang keluar (M)
ΔS
= perubahan volume (L3)
Δt
= periode waktu (T)
(II.7)
II.2.2 Persamaan Energi
Fluida memiliki energi dalam tiga bentuk. Besarnya energi tergantung dari
pergerakan fluida (energi kinetik), elevasi (energi potensial), dan tekanan (energi
tekanan). Energi dari suatu fluida per berat satuan fluida tersebut dinyatakan
sebagai head. Energi kinetik disebut sebagai head kecepatan (V2/2g), energi
potensial disebut sebagai head elevasi (Z), dan energi tekanan internal disebut
sebagai head tekanan (P/ γ ). Satuan yang umum digunakan untuk energi adalah
11
foot-pounds (Joule), sedangkan satuan dari head adalah feet (meter).
H =Z+
dimana:
P
γ
+
V2
2g
(II.8)
H = Head total (L)
Z = elevasi di atas datum (L)
P = tekanan (M/L/T2)
γ = berat spesifik fluida (M/L2/T2)
V = kecepatan (L/T)
g = percepatan gravitasi (L/T2)
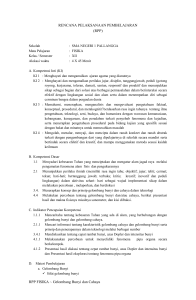
Gambar II.2 EGL dan HGL
Sumber: Walski et al, 2002
Gambar II.2 menunjukkan EGL dan HGL untuk saluran pipa sederhana. Setiap
titik di dalam sistem hidrolika memiliki nilai head tertentu. Di dalam sistem
hidrolika dikenal juga istilah lain yaitu EGL (energy grade line) dan HGL
(hydraulic grade line). EGL atau garis energi adalah pernyataan grafis dari energi
di tiap bagian. Sedangkan jumlah dari head elevasi dan head tekanan
menghasilkan suatu nilai HGL, yang menunjukkan ketinggian air yang naik di
dalam suatu tabung kecil yang melekat pada suatu pipa dan terbuka terhadap
atmosfer (Walski et al, 2002).
12
Persamaan energi yang dirangkai dengan persamaan headloss akan membantu
engineer untuk menentukan ke arah mana air mengalir secara hidrolis dan
seberapa cepat air tersebut mengalir di dalam saluran tertutup. Sebuah persamaaan
energi dapat dideskripsikan sebagai berikut:
v12 − v 22
P − P2
+ z1 − z 2 + 1
= −w + h
2g
γ
dimana:
(II.9)
w = Usaha/energi luar (pemompaan), (L)
h = kehilangan energi, (L)
Semua variabel pada persamaan II.9 dapat bernilai positif ataupun negatif kecuali
variabel h, yang hanya bernilai positif. Energi yang hilang (headloss) tidak dapat
dikembalikan sehingga bentuk ini hanya akan menentukan arah aliran saja. Jika
aliran bergerak dari titik 1 ke 2 maka harga h akan positif. Namun jika harga h
bernilai negatif maka aliran tersebut sebenarnya bergerak sebaliknya, yaitu dari
titik 2 ke 1 (Walski, 1984).
II.2.3 Kehilangan Energi
Headloss atau kehilangan energi biasanya disebabkan oleh dua jenis mekanisme
(Walski et al, 2002), yaitu:
•
Friksi atau gesekan sepanjang pipa, sering disebut sebagai friction losses atau
mayor losses
•
Turbulensi yang diakibatkan oleh perubahan garis alir ketika aliran melalui
suatu sambungan pipa dan perlengkapan lainnya, sering disebut sebagai minor
losses
II.2.3.1 Mayor Losses
Dalam cairan yang mengalir melalui sebuah pipa terdapat tegangan geser di antara
cairan dan dinding pipa. Tegangan geser ini merupakan hasil dari gaya gesekan,
yang besarnya tergantung pada sifat fluida yang melalui pipa, kecepatan aliran,
kekasaran pipa, panjang dan diameter pipa (Walski et al, 2002). Terdapat
beberapa formula yang digunakan dalam menghitung headloss mayor, yaitu
formula Darcy-Weisbach, Hagen-Poiseuille, dan Hazen-Williams.
13
Formula Darcy-Weisbach
Formula Darcy-Weisbach dikembangkan dari hasil analisis dimensional. Formula
ini merupakan dasar untuk menghitung headloss untuk aliran fluida dalam pipa
dan saluran. Formula ini diturunkan dari pengembangan persamaan Hukum
Kedua Newton dan banyak digunakan dalam pemodelan sistem distribusi air
minum, terutama di Eropa. Persamaannya adalah:
hL = f
dimana:
LV 2
D2 g
(II.10)
f = faktor gesekan Darcy-Weisbach
g = konstanta percepatan gravitasi (L/T2)
3
Q = debit fluida (L /T)
Parameter diameter
, panjang pipa
, dan kecepatan
dapat ditentukan
dengan mudah pada berbagai situasi. Namun, tidak demikian halnya dengan ,
faktor friksi, tidak dapat diukur dan tidak constant bahkan pada pipa yang telah
ditentukan sekalipun. Faktor gesekan Darcy-Weisbach tergantung dari kecepatan,
densitas, dan viskositas fluida; ukuran pipa; dan kekasaran pipa. Kecepatan fluida,
densitas, dan viskositas diekspresikan oleh bilangan Reynolds; sedangkan
kekasaran pipa diekspresikan oleh kekasaran relatif, yaitu kekasaran pipa (ε )
dibagi dengan diameter pipa (D) (Walski et al, 2002).
Persamaan Hagen-Poiseuille
Penurunan head untuk aliran laminer dinyatakan oleh Persamaan HagenPoiseuille, yaitu:
hL =
dimana:
υ L V 2 64 L V 2
32υLV
=
=
64
gD2
VD D 2 g Re D 2 g
(II.11)
hL = headloss (L)
υ = viskositas kinematik (L2/T)
L = jarak antara titik 1 ke titik 2 (L)
V = kecepatan rata-rata fluida (L/T)
g = konstanta percepatan gravitasi (L/T2)
D = diameter (L)
14
Formula Hazen-Williams
Formula headloss yang sering digunakan adalah formula Hazen-Williams.
Formula Hazen-Williams dikembangkan atas dasar empiris dan umumnya hanya
digunakan pada kondisi aliran turbulen. Formula ini banyak digunakan dalam
pemodelan distribusi air minum terutama di Amerika Serikat. Dalam JICA, 1974
dijelaskan bahwa formula Hazen-Williams umumnya digunakan untuk ukuran
diameter pipa ≥ 50 mm. Formula Hazen-Williams dapat dituliskan sebagai
berikut:
hL =
dimana:
C L
C
f
1.852
D
4.87
Q1.852
(II.12)
hL = headloss karena faktor gesekan (ft, m)
L = jarak antara titik 1 ke titik 2 (ft, m)
C = faktor kekasaran relatif Hazen Williams
D = diameter (ft, m)
3
Q = debit fluida (cfs, m /s)
C f = faktor konversi satuan (4.73 English, 10.7 SI)
Pada formula Hazen-Williams juga digunakan variabel yang sama dengan yang
digunakan pada formula Darcy-Weisbach. Namun, pada formula Hazen-Williams
faktor/koefisien (C) yang digunakan tergantung dari kekasaran relatif pipa. Faktor
C yang semakin besar menunjukkan pipa semakin mulus, sedangkan faktor C
yang semakin rendah menunjukkan pipa semakin kasar (Walski et al, 2002).
Harga koefisien Hazen-Williams pada beberapa jenis pipa dapat dilihat pada
Tabel II.2.
Persamaan Hazen-Williams sangat sering digunakan dalam desain maupun
analisis tekanan dari suatu sistem perpipaan. Persamaan ini dikembangkan secara
eksperimental. Oleh karena itu, terdapat keterbatasan yaitu tidak dapat digunakan
untuk fluida selain air dan hanya dalam temperatur yang biasanya dialami sistem
air minum (Haestad Methods, 2002).
15
Tabel II.2 Harga Koefisien Hazen-Williams untuk Beberapa Jenis Pipa
C-factor Values for Discrete Pipe Diameters
1.0 in
(2.5 cm)
3.0 in
(7.6 cm)
6.0 in
(15.2 cm)
12 in
(30 cm)
24 in
(61 cm)
48 in
(122 cm)
Uncoated cast iron - smooth and new
121
125
130
132
134
Coated cast iron - smooth and new
129
133
138
140
141
Type of Pipe
30 years old
Trend 1 - slight attack
100
106
112
117
120
Trend 2 - moderate attack
83
90
97
102
107
Trend 3 - appreciable attack
59
70
78
83
89
Trend 4 - severe attack
41
50
58
66
73
Trend 1 - slight attack
90
97
102
107
112
Trend 2 - moderate attack
69
79
85
92
96
Trend 3 - appreciable attack
49
58
66
72
78
Trend 4 - severe attack
30
39
48
56
62
60 years old
100 years old
Trend 1 - slight attack
81
89
95
100
104
Trend 2 - moderate attack
61
70
78
83
89
Trend 3 - appreciable attack
40
49
57
64
71
Trend 4 - severe attack
21
30
39
46
54
Newly scraped mains
109
116
121
125
127
Newly brushed mains
97
104
108
112
115
137
142
145
148
148
Miscellaneous
Coated spun iron - smooth and new
Old - take as coated cast iron of same age
Galvanized iron - smooth and new
120
129
133
Wrought iron - smooth and new
129
137
142
Coated steel - smooth and new
129
137
142
145
148
148
Uncoated steel - smooth and new
134
142
145
147
150
150
Coated asbestos cement - clean
147
149
150
152
Uncoated asbestos cement - clean
142
145
147
150
Spun cement-lined and spun bitumen- lined - clean
147
149
150
152
153
Smooth pipe (including lead, brass, copper,
polyethylene, and PVC)-clean
140
147
149
150
152
153
PVC wavy - clean
134
142
145
147
150
150
69
79
84
90
95
Concrete - Scobey
Class 1 - Cs = 0.27; clean
Class 2 - Cs = 0.31; clean
95
102
106
110
113
Class 3 - Cs = 0.345; clean
109
116
121
125
127
Class 4 - Cs = 0.37; clean
121
125
130
132
134
Best - Cs = 0.4; clean
129
133
138
140
141
Tate relined pipes - clean
109
116
121
125
127
147
150
150
Prestressed concrete pipes - clean
Sumber: Lamount, 1981 dalam Walski et al, 2002
16
II.2.3.2 Minor Losses
Headloss juga terjadi pada aksesoris atau perlengkapan perpipaan, seperti valve,
tee, bend, reducer, dan sebagainya. Headloss ini disebut sebagai minor losses atau
headloss minor. Headloss minor terjadi dikarenakan adanya turbulensi aliran
fluida ketika melewati aksesoris pipa tersebut. Headloss minor dihitung dengan
mengalikan koefisien headloss minor dengan head kecepatan, seperti dapat dilihat
pada persamaan berikut:
V2
Q2
hm = K L
= KL
2g
2 gA2
dimana:
(II.13)
hm = headloss minor (L)
K L = koefisien headloss minor
V = kecepatan (L/T)
g = konstanta percepatan gravitasi (L/T2)
A = luas penampang pipa (L2)
3
Q = debit fluida (L /T)
Koefisien headloss minor diperoleh dari hasil percobaan dan datanya dapat dilihat
pada Tabel II.3.
Untuk sistem distribusi air, headloss minor umumnya lebih kecil dibandingkan
dengan headloss akibat gesekan (headloss mayor). Oleh karena itu, dalam
pemodelan seringkali headloss minor ini diabaikan. Hanya untuk kondisi tertentu
saja, seperti pada rumah pompa yang banyak terdapat asesoris pipa, headloss
minor diperhitungkan. Sama halnya dengan koefisien kekasaran, koefisien
headloss minor berubah terhadap kecepatan. Namun dalam prakteknya, nilai
tersebut dianggap konstan (Walski et al, 2002).
Pada sistem perpipaan yang relatif terdiri dari banyak aksesoris dibandingkan
dengan panjang pipa, seperti pada sistem pemanas dan pendingin, minor losses
memiliki dampak yang signifikan terhadap kehilangan energi (Haestad Methods,
2002).
17
Tabel II.3 Harga Koefisien Headloss Minor
Fitting
KL
Pipe entrance
Fitting
KL
90˚ smooth bend
Bellmouth
0.03-0.05
Rounded
0.12-0.25
Bend radius/D = 2
0.19-0.25
Sharp-edged
0.50
Bend radius/D = 1
0.35-0.40
Projecting
0.78
Contraction - sudden
Bend radius/D = 4
0.16-0.18
Mitered bend
θ = 15˚
0.05
D2/D1 = 0.80
0.18
θ = 30˚
0.10
D2/D1 = 0.50
0.37
θ = 45˚
0.20
D2/D1 = 0.20
0.49
θ = 60˚
0.35
θ = 90˚
0.80
Contraction - conical
D2/D1 = 0.80
0.05
D2/D1 = 0.50
0.07
D2/D1 = 0.20
0.08
Expansion - sudden
Tee
Line flow
0.30-0.40
Branch flow
0.75-1.80
Tapping T Branch
D2/D1 = 0.80
0.16
d = tapping hole diameter
D2/D1 = 0.50
0.57
D = main line diameter
D2/D1 = 0.20
0.92
Expansion - conical
D2/D1 = 0.80
0.03
D2/D1 = 0.50
0.08
D2/D1 = 0.20
0.13
Gate valve - open
3/4 open
1.1
1.97(d/D)4
Cross
Line flow
0.50
Branch flow
0.75
45˚ Wye
Line flow
0.30
Branch flow
0.50
Check valve - conventional
4.0
1/2 open
4.8
Check valve - clearway
1.5
1/4 open
27
Check valve - ball
4.5
Globe valve - open
10
Cock - straight through
0.5
Angle valve - open
4.3
Foot valve - hinged
2.2
Butterfly valve - open
1.2
Foot valve - poppet
12.5
Sumber: Walski, 1984 dalam Walski et al, 2002
II.3 Sistem Distribusi Air
Sistem penyediaan air minum umumnya terdiri dari sumber air baku dan intake;
instalasi pengolahan; serta sistem distribusi dan pelayanan. Prinsip mendasar
sistem distribusi air adalah mengantarkan air yang telah diolah ke seluruh daerah
pelayanan sistem penyediaan air minum. Persyaratan yang harus terpenuhi dalam
distribusi tersebut yaitu terpenuhinya tekanan dan kuantitas air, menjaga kualitas
air dan kontinuitas penyediaan air (JICA,1974).
18
Pendistribusian air dilakukan dengan saluran tertutup atau dengan perpipaan
dengan maksud supaya tidak terjadi kontaminasi terhadap air yang mengalir di
dalamnya. Disamping itu, dengan sistem perpipaan, air lebih mudah untuk
dialirkan karena adanya tekanan air (Darmasetiawan, 2004). Komponen dari
sistem distribusi adalah:
1. Reservoir, yaitu suatu bangunan yang menampung air sementara sebelum
didistribusikan ke pemakai air.
2. Sistem perpipaan, merupakan rangkaian pipa yang menghubungkan antara
reservoir dengan perpipaan. Sistem perpipaan secara hierarki terdiri dari pipa
induk, pipa sekunder, dan pipa service.
3. Sistem sambungan pelanggan, merupakan ujung dari pipa service dilengkapi
dengan meter air, check valve, box meter, dan lain-lain.
Dalam sistem distribusi air, konsumen membutuhkan air keran dengan tekanan
yang mencukupi, atau dengan kata lain konsumen disuplai dengan kuantitas air
yang diinginkan dengan waktu yang tepat pula. Di Jepang, tekanan air di pipa
terakhir besarnya sekitar 15 m, atau minimum 10 m. Biasanya, head tersebut
cukup untuk keperluan praktis di rumah-rumah (JICA,1974).
Sistem distribusi air pada kenyataannya tidaklah terdiri dari satu pipa melainkan
kombinasi yang rumit antara pipa, valve, pompa, tangki, reservoir, dan
perlengkapan lainnya, yang kemudian dalam satu kesatuan dinamakan sebagai
jaringan pipa (Walski, 1984).
Secara umum, permasalahan dalam sistem jaringan distribusi air dapat
dikategorikan ke dalam empat kelompok (Walski, 1984), yaitu:
1. Cara analisis dengan pertimbangan waktu (steady, gradually, transient),
2. Topologi sistem (seri, cabang, cabang dengan multi tangki, loop),
3. Cara membangun persamaan sistem (persamaan debit, persamaaan head,
persamaan loop, optimalisasi), dan
4. Metoda yang digunakan untuk menyelesaikan persamaan-persamaan tersebut
(analitis, grafis, Hardy-Cross, Teori Linear, Newton-Raphson, dan lain-lain).
19
Pemecahan permasalahan aliran air dalam jaringan pipa akan mengkombinasikan
persamaan-persamaan kontinuitas, energi, dan momentum sedemikian rupa
sehingga dapat menurunkan tingkat kerumitan masalah dan akhirnya dapat
diselesaikan dengan bantuan komputer ataupun dilakukan secara manual.
Pada persamaan head loss terdapat lima variabel yaitu panjang pipa (L), diameter
pipa (D), debit (Q), headloss dan kekasaran. Pada dasarnya, panjang pipa dan
kekasaran harus ditentukan sebelumnya sehingga engineer akan menyelesaikan
tiga variabel tersisa. Penyelesaian variabel headloss dan debit termasuk dalam
permasalahan hidrolika sepenuhnya, sedangkan pemilihan diameter pipa
memerlukan pendekatan hidrolika dan ekonomi sekaligus.
Pada kebanyakan permasalahan jaringan pipa, debit di masing-masing pipa tidak
diketahui. Akan tetapi, debit yang keluar dari jaringan (demand/water
consumption) dan head pada ketinggian tertentu nilainya diketahui sehingga
penyelesaian masalah akan terdiri dari penentuan debit di masing-masing pipa dan
ketinggian head di tiap node dalam sistem jaringan pipa tersebut. Problem tersebut
dikenal dengan istilah network flow analysis.
Dalam analisis jaringan perpipaan terdapat dua macam analisis atau simulasi
(Haestad Methods, 2002; Walski et al, 2002), yaitu:
1. Steady-State Network Hydraulics, digunakan untuk memperlihatkan perilaku
operasional sistem jaringan pada suatu waktu tertentu atau pada kondisi tunak.
Steady-State Simulation sangat berguna untuk memberikan informasi kepada
desainer mengenai kondisi sistem distribusi pada saat peak hour ataupun pada
saat petugas pemadam kebakaran menggunakan air dalam jumlah yang sangat
besar dalam waktu yang sangat singkat.
2. Extended-Period Simulation, digunakan untuk memperlihatkan perilaku
sistem sepanjang waktu. Pada analisis ini juga dimodelkan kasus-kasus seperti
pengisian dan pengeluaran air dari tangki; buka dan tutup valve; dan
operasional pompa. Simulasi ini sangat membantu engineer untuk memahami
bagaimana sistem distribusi bekerja selama rentang periode simulasi berjalan.
20
Program mengenai analisis sistem distribusi air cukup banyak tersedia. Aplikasi
komputer dalam pemodelan matematis sistem distribusi air membuka wawasan
baru dalam hal manajemen penggunaan air dan mendukung peningkatan sistem
operasi distribusi air. Beberapa penggunaan model matematis dalam kaitannya
dengan sistem penyediaan air, yaitu (Walker, 1978):
1. Menganalisis permasalahan tekanan atau gangguan pompa dan reservoir untuk
memberikan aliran yang diinginkan.
2. Mengembangkan prosedur operasi untuk keadaan darurat, seperti kebakaran,
kerusakan pipa, pompa dan reservoir.
3. Mengindikasikan pengembangan jaringan sistem penyediaan air.
4. Menentukan prioritas dalam pengembangan kapasitas sistem.
5. Mengevaluasi
kemampuan
sistem
penyediaan
air
eksisting
untuk
mengantisipasi peningkatan kebutuhan air.
6. Membandingkan alternatif-alternatif dalam sistem penyediaan air.
7. Mengestimasi efek adanya industri baru terhadap kondisi eksisting sistem.
8. Keuntungan yang dicapai jika beberapa sistem air digabungkan.
9. Mengevaluasi dampak adanya perubahan atau penambahan ke dalam sistem.
II.3.1 Model Matematis Jaringan Pipa
Dalam problem network flow analysis, secara matematis dengan mengetahui Q
(debit yang keluar dari masing-masing node) maka dapat dihitung penyebaran
aliran di setiap pipa di jaringan dengan tentunya memperhatikan karakteristik
hidrolis dari pipa (dimana selalu ada hubungan antara debit dan headloss). Pada
prinsipnya, dengan terhitungnya headloss maka H atau tekanan di setiap node
dapat dicari. Masalahnya adalah dari arah manapun headloss dihitung maka
tekanan di suatu node harus mempunyai hasil perhitungan yang sama
(Darmasetiawan, 2004).
Terdapat beberapa cara yang dapat digunakan untuk membangun model
matematis jaringan pipa, yaitu dengan membangun persamaan debit (Q),
persamaan node (H), dan persamaan loop (∆Q).
21
II.3.1.1 Persamaan Debit (Q)
Pada persamaan ini pendekatan yang dilakukan adalah dengan menggunakan debit
pada setiap pipa sebagai variabel yang tidak diketahui dan menyusun sejumlah P
persamaan (dimana P adalah banyaknya pipa): satu persamaan energi untuk
masing-masing loop dan satu persamaan kontinuitas untuk masing-masing node
(Walski, 1984).
Persamaan debit untuk suatu sistem dengan L loop dan N node adalah:
ml
pl
i =1
k =1
∑ hil − ∑ h pkl = dhl
nq
∑Q
i =1
dimana:
iq
= Uq
(l = 1,2,..., L )
(q = 1,2,..., L)
(II.14)
(II.15)
hil = headloss pipa i pada loop l
h pkl = head dari pompa k pada loop l
dhl = perubahan head dalam loop l
ml = jumlah pipa pada loop l
Pl = jumlah pompa pada loop l
Qiq = debit masuk ke node q dari pipa I yang terhubung dengan node
U q = debit yang digunakan pada node q
n q = jumlah pipa masuk ke node q
Untuk menyelesaikan persamaan di atas perlu dilakukan subtitusi persamaan
headloss (Contoh Hazen-Williams atau Darcy Weisbach) untuk variabel h ; dan
kurva head pompa untuk varibel h p .
Membangun model matematis dengan persamaan Q akan menghasilkan jumlah
persamaan yang lebih banyak dibandingkan dengan membangun model
menggunakan persamaan H dan ∆Q. Akan tetapi, persamaan kontinuitas adalah
linear dan persamaan energi dapat dilinearisasi sehingga hal ini memungkinkan
dapat memberikan keuntungan dalam penyelesaiannya yang menggunakan
metode solusi numerik tertentu (Walski, 1984).
22
II.3.1.2 Persamaan Node (H)
Jumlah
persamaan
menggabungkan
yang
akan
diselesaikan
dikurangi
dengan
persamaan energi tiap pipa dengan persamaan kontinuitas.
, dapat juga ditulis:
Persamaan headloss untuk sebuah pipa,
H i − H j = K ij Qij
dimana:
dapat
nij
(II.16)
sgn Qij
= head pada node ke-i (L)
= koefisien head loss untuk pipa dari node i ke node j
= debit dari node i ke node j, L3/T
= eksponen pada persamaan head loss untuk pipa dari i ke j
Karena head loss bernilai positif untuk menunjukkan arah aliran, maka
*), dan persamaan II.16 menjadi:
–
(
Qij = sgn (H i − H j ) H i − H j K ij
)
1 nij
(II.17)
Dan persamaan kontinuitas di node i dapat ditulis :
mi
∑Q
k =t
dimana:
ki
= Ui
(II.18)
= debit menuju node i dari node k (L3/T)
= konsumsi air pada node i (L3/T)
= pipa yang terhubung dengan node i
Dengan menggabungkan persamaan II.17 dan II.18 maka diperoleh persamaan
sebagai berikut,
⎛ Hi − H j
sgn (H i − H j )⎜
∑
⎜ K ij
k =t
⎝
mi
1
⎞ nij
⎟ =U
i
⎟
⎠
(II.19)
Untuk setiap node akan diperoleh satu persamaan H. Persamaan ini adalah
persamaan tak linear sehingga teknik penyelesaiannya berbeda dengan teknik
yang digunakan dalam penyelesaian persamaan Q (Walski, 1984).
⎧+ 1 bila x > 0
*) sgn (x ) = ⎨− 1 bila x < 0
⎩
23
II.3.1.3 Persamaan Loop (∆Q)
Pendekatan persamaan loop diawali dengan menuliskan persamaan energi,
sebagai solusi awal, untuk terpenuhinya persamaan kontinuitas. Selanjutnya, ini
menjadi masalah pengkoreksian terhadap debit yang diperoleh di setiap loop. Hal
ini dapat dilakukan dengan menambahkan faktor koreksi debit di setiap pipa di
dalam loop. Persamaaan loop dapat dituliskan sebagai berikut:
mi
F (ΔQ ) = ∑ K i [sgn (Qii + ΔQl )]Qii + ΔQl
n
i =1
= dhl
(II.20)
(l = 1,2,..., L )
dimana:
= estimasi debit awal pada pipa ke-i
∆
= koreksi debit pada loop ke-i
= jumlah pipa pada loop ke-i
= jumlah loop
Jumlah persamaan loop tergantung pada jumlah loop. Dengan kata lain, sebanyak
L loop akan menghasilkan persamaan loop sebanyak L (Walski, 1984).
II.3.2 Teknik Solusi Numerik
Sistem persamaan pada jaringan distribusi yang telah dibangun membutuhkan
teknik numerik untuk menyelesaikannya. Sebagian besar persamaan yang
dibangun merupakan persamaan tak linear, sehingga teknik yang dapat digunakan
relatif terbatas. Teknik numerik yang biasa digunakan adalah: (1) metode Teori
Linear; digunakan dengan melinearisasi persamaan tak linear kemudian
menyelesaikan persamaan linear tersebut sehingga dapat disubtitusikan kembali
ke persamaan tak linear untuk mengetahui tingkat konvergensinya, (2) metode
Newton-Rhapson; mengkonvergensi persamaan-persamaan tersebut menggunakan
turunannya, (3) metode Hardy-Cross; dengan melakukan iterasi menggunakan
satu persamaan pada satu waktu. Umumnya, metode teori linear diaplikasikan
untuk menyelesaikan persamaan debit (Q). Metode Newton-Rhapson dan Hardy
Cross biasanya digunakan untuk menyelesaikan persamaan node dan loop
(Walski, 1984). Selain ketiga metode tersebut, terdapat metode lain yang telah
diaplikasikan dalam suatu software simulasi distribusi air, EPANET 2.0, yaitu
24
Metode Gradien, dikembangkan oleh Todini dan Pilati (1987) yang dibangun
dengan pendekatan hibridisasi persamaan Node-Loop.
II.3.2.1 Metode Teori Linear
Metode ini umumnya digunakan untuk menyelesaikan persamaan Q, yang
berorientasi pada variabel debit. Persamaan kontinuitas merupakan persamaan
linear, sedangkan persamaan energi adalah tak linear. Persamaan energi dibuat
dalam bentuk linear, yaitu dalam bentuk:
N
∑a Q
i =1
dimana:
i
i
= dh
(II.21)
a i = K i Qin −1
Hasil dari persamaan kontinuitas dan energi tersebut merupakan suatu sistem
persamaan linear maka sistem persamaan tersebut dapat diselesaikan dengan
menggunakan teknik yang powerful untuk menyelesaikan persamaan linear,
contohnya Eliminasi Gauss ataupun Iterasi Jacobi.
Dengan menggunakan persamaan II.21 maka akan diperoleh
1
persamaan linear, dapat ditulis menjadi:
a11Q1 + a12 Q2 + ... + a1k Qk = dh1 ⎫
⎪
M
⎬ L persamaan
a L1Q1 + a L 2 Q2 + ... + a Lk Qk = dhk ⎪⎭
b11Q1 + b12 Q2 + ... + b1k Qk = U 1
⎫
⎪
M
⎬ N - 1 persamaan
bN −1,1Q1 + b N −1, 2 Q2 + ... + b N −1,3 Qk = U N −1 ⎪⎭
(II.22)
dimana:
⎧⎪ K Q
aij = ⎨ j j
⎪⎩0
⎧+ 1
⎪
bij = ⎨- 1
⎪0
⎩
n −1
, jika pipa j terdapat dalam loop i
, jika pipa j tidak terdapat dalam loop i
, jika aliran dalam pipa j positif menuju node i
, jika aliran dalam pipa j negatif menuju node i
, jika pipa j tidak terhubung dengan node i
25
Untuk menyelesaikan suatu masalah jaringan distribusi maka perlu menyelesaikan
sistem persamaan linear yang dibangun, yaitu dengan menghitung ulang konstanta
dan menyelesaikan kembali persamaan linear-nya dengan berulang-ulang
sampai solusi tercapai (konvergen). Keuntungan metode teori linear adalah tidak
membutuhkan suatu solusi awal. Oleh karena itu, seluruh nilai
dapat diatur
dengan nilai acak dan metode ini akan tetap konvergen. Tentu saja, solusi awal
yang baik akan mempercepat konvergensi (Walski, 1984).
Metode Teori Linear (Wood and Charles, 1972 dalam Todini & Pilati, 1988)
dapat dianggap sebagai penerapan teknik Newton-Raphson pada model yang
dibangun dari persamaan loop. Metode ini membutuhkan solusi sistem persamaan
yang lebih besar (sejumlah loop + sejumlah node), meskipun dapat mengurangi
resiko kegagalan/tidak tercapainya konvergen.
II.3.2.2 Metode Newton-Raphson
Penyelesaian metode Newton-Raphson, baik untuk model yang dibangun dari
persamaan loop maupun persamaan node, bisa dipandang sebagai perluasan
teknik koreksi Hardy Cross dengan menggunakan algoritma koreksi multidimensi
secara simultan. Metode ini meskipun lebih konvergen dibandingkan dengan
teknik gradien lokal (Hardy Cross), masih menunjukkan beberapa kekurangan
yang tergantung pada kompleksitas jaringan dan pilihan nilai awal untuk memulai
teknik ini (Todini & Pilati, 1988).
Metode Newton-Raphson adalah metode numerik yang powerful untuk
menyelesaikan sistem persamaan tak linear. Metode ini cocok untuk
menyelesaikan persamaan yang diekspresikan dengan fungsi
solusi merupakan nilai
0, dimana
yang menyebabkan F mendekati 0. Metode ini selalu
konvergen jika tebakan awal cukup mendekati solusi namun kerugian dari metode
ini adalah diperlukannaya turunan pertama dari fungsi
fungsi mudah untuk ditentukan turunannya. Turunan fungsi
dF F (x + Δx ) − F ( x )
=
dx
Δx
dimana tidak semua
dapat dituliskan:
(II.23)
26
Dengan memberikan estimasi nilai awal , penyelesaian masalah ini adalah nilai
yang memaksa
penyelesaian
∆
mendekati 0. Menyusun
menjadi 0 dan
menjadi:
Δx = − F ( x ) / F ' ( x )
(II.24)
menjadi
dan diperoleh nilai baru
berlangsung sampai
untuk iterasi berikutnya. Proses ini
cukup dekat dengan nol.
Persamaan II.23 hanya berlaku untuk satu persamaan dan satu variabel yang tidak
diketahui. Akan tetapi, dalam permasalahan jaringan pipa terdapat banyak
persamaan dengan banyak variabel yang tidak diketahui. Metode NewtonRaphson dapat diaplikasikan dalam penyelesaian model matematis yang
diturunkan dari persamaan H dan persamaan ∆Q. Persamaan head untuk tiap node
pada jaringan pipa dapat ditulis:
N
F (H i ) = ∑
i =1
⎛ H j − Hi
sgn (H j − H i ) ⎜
⎜ K ji
⎝
[
]
(i = 1,2,..., K )
dimana:
1 / mi
−Ui
(II.25)
= jumlah pipa terhubung dengan node i
= konsumsi pada node i,
Jika nilai
⎞
⎟
⎟
⎠
pada iterasi ke- adalah
/
maka perbedaan iterasi ke- dengan
1 dapat ditulis:
dF = F (i + 1) − F (i )
(II.26)
Dapat kita tulis dengan bentuk lain
dF =
dimana
∂F
∂F
∂F
ΔH 1 +
ΔH 2 + ... +
ΔH k
∂H 1
∂H 2
∂H k
adalah perubahan head antara iterasi ke
(II.27)
dan
Permasalahan ini dapat diselesaikan dengan mencari nilai
1
1 pada loop L.
sehingga
0. Prosedur penyelesaiannya adalah dengan menetapkan nilai awal
kemudian memasukkannya ke persamaan turunan parsial
menyelesaikan persamaan linear
dan seterusnya sehingga nilai
kemudian
mendekati 0.
27
Yang perlu diingat adalah nilai dari turunan dari persamaan II.26 adalah:
⎛ H j − Hi
d
sgn (H i − H j ) ⎜
⎜ K ji
dH j
⎝
[
⎞
⎟
⎟
⎠
]
1 / mi
−1
=
(n )(K )
1 / mi
ij
(H
−Hj)
(1 / mi −1)
i
ij
dan
⎛ H j − Hi
d
sgn (H i − H j ) ⎜
⎜ K ji
dH i
⎝
[
⎞
⎟
⎟
⎠
]
1 / mi
=
1
(H i − H j )(1 / mi −1)
1 / mi
(nij )(K ij )
(II.28)
II.3.2.3 Metode Hardy-Cross
Metode Hardy Cross atau metode gradien lokal ini dikembangkan oleh Hardy
Cross pada tahun 1936. Metode ini biasanya digunakan untuk menyelesaikan
persamaan loop ∆
, walaupun dapat juga digunakan untuk menyelesaikan
persamaan debit
dan head
. Konvergensi merupakan masalah yang
dijumpai pada metode ini, terutama pada sistem yang menggunakan pompa dan
valve. Metode ini juga membutuhkan solusi awal yang memenuhi persamaan
kontinuitas. Meskipun demikian, metode ini masih banyak digunakan terutama
untuk pengerjaan secara manual dan komputer sederhana atau kalkulator, serta
hasil yang diperoleh juga cukup baik.
Untuk loop l suatu pada jaringan pipa, persamaaan ∆
dapat dituliskan dengan
persamaan :
F (Δ Q1 ) =
ml
∑ K [sgn (Qi
i =1
i
i
+ Δ Ql ) Qi i + Δ Ql
]
n
− dhl = 0
(II.29)
dimana:
ΔQl
= koreksi loop l untuk mencapai konvergen, L3/T
Qii
= estimasi debit awal pada pipa i, L3/T
ml
= jumlah pipa dalam loop l
Dengan menggunakan metode Newton, diperoleh :
mi
ΔQ(k + 1) = ΔQ −
∑ K (Qi + ΔQ ) Qi + ΔQ
i =1
i
i
l
i
ml
∑ K n Qi + ΔQ
i =1
i i
i
n −1
l
(II.30)
n −1
l
28
dimana
1 merujuk pada nilai ∆
pada iterasi ke
1 . Persamaan II.30
harus ekivalen dengan:
ΔQ(k + 1) = ΔQ(k ) −
F (k )
F ' (k )
Perlu diingat bahwa tanda
(II.31)
tergantung dari bagaimana keadaan pipa dalam loop.
Pipa yang sama mungkin saja memiliki tanda yang berbeda dalam loop yang
berbeda pula.
Dalam metode Hardy Cross, aliran di dalam tiap-tiap pipa dianggap sedemikian
rupa sehingga prinsip kontinuitas dipenuhi pada tiap node. Suatu koreksi terhadap
besar aliran yang dimisalkan haruslah dihitung berturut-turut untuk setiap putaran
pipa di dalam jaringan yang bersangkutan,sehingga koreksinya berkurang hingga
suatu besaran yang dapat diterima (Linsley & Franzini, 1979). Tahapan
penyelesaian metode Hardy Cross (JICA, 1974), adalah sebagai berikut:
1. Menentukan tanda arah aliran, biasanya searah jarum jam adalah positif (+).
2. Proses perhitungan, dengan skema:
ΔQ = −
∑h
h
1.85∑
Q
Gambar II.3 Skema Penyelesaian Metode Hardy Cross
3. Jika sebuah pipa terkait dengan dua loop, koreksi ∆Q pada pipa harus
dilakukan dari kedua loop tersebut.
CaO, 1963 dalam Todini & Pilati, 1988, membuktikan bahwa dengan memilih
independent loops (loop-loop bebas) yang tidak unik menyebabkan metode Hardy
Cross dapat divergen. Sementara itu untuk persamaan yang dibangun dari
persamaan node, metode Hardy Cross memiliki laju kekonvergenan yang lambat
dan suatu waktu tidak konvergen.
29
II.3.2.4 Metode Gradien
Metode yang dipakai pada software EPANET 2.0 ini menyelesaikan persamaan
kontinuitas dan headloss dengan menggunakan pendekatan hibridisasi node dan
loop (hybrid node-loop approach). Todini dan Pilati (1987) dan Salgado et al.
(1988) menyebut metode ini sebagai “Metode Gradien”. Pendekatan yang sama
juga dibuat oleh Hamam dan Brameller (1971) (“the Hybrid Method”) dan
Osiadacz (1987) (“the Newton Loop-Node Method”). Perbedaan di antara
metode-metode tersebut adalah cara dalam meng-update aliran pipa setelah
diperoleh nilai head node dari iterasi. Pendekatan yang digunakan Todini lebih
sederhana sehingga dipilih untuk digunakan dalam EPANET (Roosman, 2000).
Suatu jaringan pipa yang memiliki N node dan NF node tetap (tangki dan
reservoir). Persamaan dibangun dari persamaan head dan persamaan kontinuitas.
Persamaan headnya dapat ditulis:
untuk pipa,
H i − H j = hij = rQ ijn + mQ ij2
dimana:
(II.32)
= head node
= headloss
= koefisien resistansi (tergantung pers. headloss yang digunakan)
= debit
= eksponen
= koefisien headloss minor
untuk pompa,
(
hij = −ω 2 h0 − r (Qij / ω )
dimana:
n
)
(II.33)
= shutoff head pompa
= kecepatan relatif
dan
= koefisien kurva pompa
Sedabgkan persamaan kontinuitasnya,
∑Q
ij
− Di = 0 untuk i = 1, 2, 3, …, N
(II.34)
j
dimana:
= flow demand pada node i (aliran masuk bertanda +)
30
Metode gradien dimulai dengan memberikan debit awal pada setiap pipa. Pada
tiap iterasinya, setiap head di tiap node akan diperoleh dengan menyelesaikan
matriks berikut:
AH
F
(II.35)
A = matriks Jacobi NxN
dimana:
H = vektor head yang tidak diketahui (Nx1)
F = vektor sisi kanan (Nx1)
Elemen diagonal dari matriks Jacobi:
Aii = ∑ p ij
(II.36)
j
sedangkan, selain elemen diagonal:
Aij = − p ij
dimana
(II.37)
adalah kebalikan dari turunan persamaan head pada link antara node i
dan node j. Untuk pipa,
pij =
1
nr Qij
n −1
(II.38)
+ 2m Qij
Sedangkan untuk pompa,
pij =
1
(II.39)
nω r (Qij ω )
n −1
2
Pada vektor sisi kanan, F dirumuskan:
⎛
⎞
Fi = ⎜⎜ ∑ Qij − Di ⎟⎟ + ∑ y ij + ∑ p ij H f
f
⎝ j
⎠ j
dimana
∑p
ij
(II.40)
H f berlaku unutuk setiap link yang menghubungkan node i dengan
f
node tetap (tangki dan reservoir). Faktor koreksi aliran,
Untuk pipa,
(
y ij = p ij r Qij
Untuk pompa,
(
n
+ m Qij
2
dilukiskan sebagai:
)sgn (Q )
(II.41)
)
(II.42)
ij
y ij = − p ij ω 2 h0 − r (Qij ω )
n
dimana sgn(x) adalah 1 jika x > 0 dan -1 jika sebaliknya. Untuk pompa, nilai
selalu positif.
31
Setelah nilai head yang baru ditemukan dengan menyelesaikan matriks AH
F
maka nilai debit yang baru dapat dicari dari persamaan,
(
)
Qij = Qij − y ij − p ij (H i − H j )
(II.43)
Dari persamaan di atas, proses iterasi kembali dilakukan jika perbedaan dari nilai
sisi kiri dan kanan masih lebih besar dari nilai toleransi yang ditetapkan (misal
0,001). Iterasi dilakukan kembali dengan meyelesaikan kembali II.35 dan II.43.
EPANET 2.0 mengimplementasikan metode Gradien dengan melakukan proses
perhitungan menggunakan satuan feet (untuk head) dan cfs (untuk debit). Selain
itu dalam pertama kali proses iterasi, nilai awal yang dipilih untuk aliran dalam
pipa adalah nilai yang sama dengan nilai debit ketika nilai kecepatan alirannya
sebesar 1 ft/sec. Sedangkan, nilai awal aliran yang melalui pompa besarnya sama
dengan debit desain pompa (Roosman, 2000).
II.4 Algoritma Genetika
Algoritma Genetika (AG) pertama kali dikembangkan oleh John Holland dalam
bukunya “Adaptation in Natural and Artificial System” pada tahun 1975.
Algoritma Genetika dapat dipandang sebagai suatu teknik pencarian (searching
method) secara stokastik yang idenya diperoleh dari proses evolusi di alam.
Algoritma ini meniru mekanisme kerja seleksi alam dan genetika dalam
menyelesaikan masalah. Dengan kata lain, Algoritma Genetika merupakan suatu
proses evolusi buatan terhadap sekumpulan titik (individu) yang merupakan
kandidat solusi dari suatu masalah, yang terjadi di dalam komputer dan
berlangsung secara iteratif (dalam beberapa generasi). Teknik konvensional untuk
optimasi problem kompleks biasanya tidak efisien secara komputasional, berbeda
dengan Algortima Genetika yang relatif lebih efisien. Oleh karena itu, Algoritma
Genetika biasanya digunakan sebagai alternatif untuk memecahkan problem
optimasi yang kompleks dan memiliki derajat non linearitas yang tinggi.
Algoritma Genetika menggunakan prosedur pencarian secara acak seperti halnya
pada evolusi biologi, prosedur crossover, dan hanya ‘keturunan’ yang paling
cocok saja yang akan bertahan untuk terus berkembang biak (Goldberg, 1989).
32
Algoritma Genetika sama sekali berbeda dari algoritma optimisasi lainnya.
Sebagai contoh, Algoritma Genetika tidak menggunakan gradient maupun
Hessian.
Oleh
karenanya,
Algoritma
Genetika
dapat
digunakan
pada
permasalahan optimisasi yang lebih luas (Chong & Zak, 2001).
Berbeda dengan teknik pencarian konvensional, Algoritma Genetika bekerja
dalam sekumpulan calon solusi yang disebut sebagai populasi. Sedangkan
masing-masing calon solusi disebut sebagai individu atau string. Individu terdiri
dari sekumpulan gen atau bit yang merepresentasikan sifat dan karakter dalam
satu iterasi atau generasi. Untuk setiap generasi, individu akan mengalami proses
evolusi (seleksi alam) dan proses genetika (persilangan dan mutasi) yang nantinya
akan menghasilkan generasi populasi baru. Dalam Algoritma Genetika dikenal
adanya fungsi fitness. Nilai fungsi fitness merupakan ukuran seberapa adaptif
suatu individu terhadap lingkungannya. Fungsi ini berkaitan erat dengan masalah
yang akan diselesaikan. Tidak semua masalah dapat secara langsung diselesaikan
dengan Algoritma Genetika, melainkan harus dimodifikasi sedemikian rupa
menjadi suatu fungsi fitness sehingga dapat diselesaikan oleh Algoritma Genetika.
Individu dengan nilai fungsi fitness tinggi menunjukkan bahwa individu tersebut
merupakan kandidat solusi masalah. Algoritma Genetika bertujuan untuk mencari
individu dengan nilai fungsi fitness yang tinggi.
Ada empat perbedaan dasar mekanisme kerja antara Algoritma Genetika dengan
metode konvensional (Goldberg, 1989), yaitu:
1. Algoritma Genetika bekerja pada suatu kode dari himpunan parameter, bukan
parameter itu sendiri.
2. Algoritma Genetika bekerja pada sekumpulan titik (populasi), bukan hanya
sebuah titik. Oleh karena itu, peluang Algoritma Genetika untuk terjebak
dalam optimum lokal dapat dikurangi.
3. Algoritma Genetika bekerja hanya menggunakan informasi fungsi fitness.
Tidak membutuhkan turunan ataupun informasi bantuan lainnya.
4. Algoritma Genetika menggunakan aturan probabilistik, bukan aturan
deterministik.
33
Keberhasilan dan unjuk kerja Algoritma Genetika tergantung pada berbagai
parameter: ukuran populasi, jumlah generasi, serta probabilitas crossover dan
mutasi. Unjuk kerja yang baik dari Algoritma Genetika membutuhkan nilai
probabilitas crossover yang tinggi dan nilai probabilitas mutasi yang rendah
(Goldberg, 1989; Linfield & Penny, 1995; dalam Fauzan, 2002)
Secara umum, terdapat enam langkah dasar dalam Algoritma Genetika (Goldberg,
1989 dalam Saiman, 2003), yaitu:
1. Membangun Populasi Awal
Pada tahap awal, algoritma secara acak akan membangun populasi dengan jumlah
individu N. Setiap individu terdiri dari sekumpulan gen atau bit yang pada
umumnya merupakan string biner. Jumlah gen dalam tiap individu atau yang
disebut panjang individu biasanya berhubungan dengan berapa ketelitian nilai
yang diinginkan. Hubungan ini dirumuskan sebagai berikut:
2
dimana:
p j −1
p −1
≤ (b j − a j )⋅10d ≤ 2 j
= 1,2,...,m
(II.44)
dengan m = banyak variabel
= ketelitian nilai
[a , b ] = interval
j
j
p j = panjang bit variabel ke-j
2. Evaluasi
Setelah terbentuk populasi awal, selanjutnya Algoritma Genetika akan
mengevaluasi setiap individu ke dalam populasi. Pertama, tiap individu akan
dikonversi terlebih dahulu dari kode biner ke nilai riil. Adapun rumus konversinya
adalah:
⎛ b − aj ⎞
⎟
x j = a j + bil _ des⎜ j
⎜ p j −1 ⎟
⎝2
⎠
dimana:
_
(II.45)
= bilangan desimal tiap string biner variabel
Setelah semua individu dikonversi ke nilai riilnya, selanjutnya akan dihitung
fitness tiap individu berdasarkan fungsi fitness.
34
3. Seleksi
Setelah mengevaluasi tiap individu, pada tahap ini akan dilakukan seleksi calon
orang tua berdasarkan fitness yang dimiliki. Individu yang lebih baik, yakni yang
mempunyai fitness yang lebih tinggi, mempunyai peluang yang lebih besar dan
lebih sering untuk terseleksi ke dalam himpunan calon orang tua.
Ada beberapa metode seleksi dalam AG salah satunya metode Roulette Wheel
Selection. Metode ini meniru mekanisme permainan roda rolet. Setiap individu
mendapat bagian dalam roda rolet proporsional dengan nilai fitness mereka.
Individu yang memiliki fitness tinggi akan mendapat porsi roda yang lebih besar.
Selanjutnya seleksi individu ke dalam himpunan calon orang tua dilakukan
dengan melakukan pemutaran roda rolet secara acak sebanyak jumlah individu N.
Individu yang memiliki bagian roda rolet yang lebar, yakni mewakili fitness yang
tinggi, akan mempunyai peluang yang lebih besar dan lebih sering untuk
terseleksi. Langkah-langkah dalam Roulette Wheel Selection:
•
Hitung fitness F(xi) untuk tiap individu xi
•
n
Hitung total fitness dari populasi : ∑ F x
i
i =1
•
Hitung peluang terseleksi pi untuk tiap individu xi
( )
( )
( )
Fx
i
p =
i
n
∑ F xi
i =1
•
(II.46)
(II.47)
Hitung peluang kumulatif qi untuk tiap individu xi
i
q = ∑ p
i
j
j =1
(II.48)
•
Pilih bilangan acak
•
Jika r ≤ qi , maka pilih individu pertama xi , jika tidak, pilih individu ke - i,
antara 0,1
2 ≤ i ≤ n sedemikian hingga qr −1 ≤ r ≤ qi
35
4. Persilangan
Operator genetika ini bekerja pada dua individu yang dipilih secara acak dari
himpunan calon orang tua. Untuk setiap dua individu yang terpilih akan dilakukan
rekombinasi untuk menghasilkan individu baru (keturunan). Peluang persilangan
atau Pc biasanya tinggi.
Ada beberapa jenis metode persilangan, diantaranya adalah:
•
Persilangan 1 titik (one-point crossover)
•
Persilangan 2 titik (two-point crossover)
•
Persilangan bergantian (cycle crossover)
One-point crossover
Proses kerjanya adalah dengan memilih sepasang-sepasang individu dari
himpunan calon orang tua kemudian menyilangkan mereka dengan memilih titik
persilangan acak.
Tujuan dari proses persilangan adalah mengeksplorasi daerah solusi sekitar orang
tua. Atau dengan kata lain, proses persilangan bertujuan menghasilkan keturunan
(individu baru) yang tidak jauh berbeda dari orang tua. Karena orang tua berasal
dari individu dengan fitness tinggi, maka diharapkan keturunan yang dihasilkan
juga mempunyai fitness yang tinggi.
Skema metode one-point crossover
orang tua 1
orang tua 2
101Ξ110
keterangan 1 keterangan 2
111Ξ000 Æ 101000
111110
Prosedur persilangan:
•
Semua individu dalam populasi dipasangkan dua-dua sehingga terbentuk
/2 pasangan dengan
/2 : bilangan bulat terbesar yang lebih kecil atau
sama dengan /2
•
Pilih bilangan acak rk antara 0,1 ,
1,2, . . . ,
/2
Jika rk ≤ Pc maka pasangan ke-k mengalami persilangan, lakukan persilangan
one-point crossover. Jika tidak, pasangan ke-k tidak mengalami persilangan
dan langsung terpilih ke populasi baru.
36
5. Mutasi
Setelah melakukan proses persilangan, maka akan dihasilkan individu-individu
baru. Selanjutnya, pada individu-individu ini akan dilakukan proses mutasi.
Operator genetika ini memodifikasi setiap gen/bit pada inidividu dengan peluang
Pm , mutasi jarang terjadi sehingga Pm << 1 . Pada individu dengan string biner,
jika bit mengalami mutasi maka nilai ‘0’ akan berubah menjadi ‘1’ dan nilai ‘1’
berubah menjadi ‘0’.
Prosedur mutasi:
•
Tentukan bilangan acak rk antara 0,1 ,
1,2, . . . ,
B merupakan jumlah keseluruhan bit dalam populasi
•
Jika rk ≤ Pm maka ubah nilai bit ke-k dari ‘0’ menjadi ‘1’ atau sebaliknya dari
‘1’ menjadi ‘0’.
Proses mutasi dalam Algoritma Genetika mempunyai peranan penting dalam
mengeksploitasi daerah solusi global untuk mencari individu terbaik. Dengan
mutasi diharapkan peluang Algoritma Genetika untuk terjebak di optimum lokal
dapat direduksi.
6. Uji Terminasi
Setelah melewati proses evaluasi, persilangan dan mutasi, maka Algoritma
Genetika akan menghasilkan populasi baru. Selanjutnya, populasi baru ini akan
diuji apakah sudah memenuhi kriteria penghentian. Secara umum, ada dua kriteria
penghentian, yaitu:
a. Uji kekonvergenan
Iterasi akan berhenti jika terjadi kestabilan populasi yang ditandai dengan
keseragaman hampir semua gen dalam populasi.
Definisi : (Offermans, 1995 dari Saiman 2003)
Misalkan :
: populasi dari n individu dengan 1 gen
Xk = Xk(1) Xk(2) ... Xk(l) kromosom pada individu ke-k dalam P, k=1,2,...,n
37
Gen Xk(p) stabil ⇔
terdapat > 90% individu dalam P dengan Xk(p) = c,
c Є {0,1}, p : posisi bit
P dikatakan stabil apabila semua gen pada P stabil
b. Uji iterasi
Iterasi akan berhenti jika sudah mencapai iterasi atau generasi maksimum
yang ditetapkan.
Algoritma Genetika dengan enam langkah utama tersebut disebut Algoritma
Genetika Sederhana. Diagram alir yang mengilustrasikan tahapan proses dalam
Algoritma Genetika dapat dilihat pada Gambar II.4.
Gambar II.4 Diagram Alir Algoritma Genetika
Sumber: Chong & Zak, 2001
38
II.5 Metode Newton
Masalah penentuan akar suatu persamaan (linear maupun tidak linear) atau dapat
juga disebut masalah penentuan pembuat nol fungsi adalah masalah yang penting
dan sering dijumpai dalam aplikasi matematika dalam bidang teknik dan sains.
Untuk menyelesaikan masalah tersebut, terdapat dua metode yang dapat
digunakan, yaitu:
1. Metode Analitik
Metode analitik merupakan metode yang memberikan nilai solusi sejati (exact
solution), yaitu solusi yang memiliki galat (error) sama dengan nol.
2. Metode Numerik
Metode numerik merupakan suatu metode yang memformulasikan persoalan
matematik sedemikian rupa sehingga dapat dipecahkan dengan menggunakan
operasi aritmatika biasa.
Namun seringkali dalam prakteknya, penyelesaian secara analitik sulit didapat
bahkan tak jarang tidak mungkin didapat. Penyelesaiaan secara numerik
merupakan alternatif yang dapat digunakan. Penyelesaian tersebut merupakan
suatu hampiran penyelesaian yang didapat setelah melakukan sejumlah berhingga
perhitungan matematis hingga kesalahan (perbedaan dengan nilai sebenarnya)
memenuhi kriteria tertentu. Dalam banyak permasalahan teknik, penyelesaian
numerik jauh lebih berguna, selain karena relatif lebih mudah didapat,
penyelesaian ini lebih mungkin direalisasikan.
Untuk menghampiri akar suatu persamaan telah dikenal beberapa metode
(Nasution dan Zakaria, 2001; Hoffman, 1992; Kaw, 2003), seperti:
1. Interval halving
2. Fixed-point iteration
3. Metode Newton
4. Metode Secant
39
Metode bisection dan metode regula falsi termasuk kedalam metode interval
halving. Kedua metode tersebut dalam proses pencarian akar persamaan tak
linear,
0, membutuhkan pengurungan akar persamaan yang akan dicari
dengan memberikan dua buah tebakan awal. Metode ini juga dikenal sebagai
metode pengurungan (bracketing methods). Keuntungan metode ini adalah error
dari solusinya terikat, maksudnya berada pada rentang nilai intervalnya.
Sedangkan, kelemahannya adalah kekonvergenannya yang lambat.
Dalam metode fixed-point iteration atau metode iterasi tunggal, penentuan akar
persamaan dilakukan dengan cara pendekatan berurutan. Metode ini kadangkadang bekerja dengan baik, namun kadang-kadang mengalami kegagalan.
Berdasarkan hal itu, metode fixed-point iteration ini tidak direkomendasikan
digunakan untuk menyelesaikan persamaan tak linear.
Metode Newton merupakan metode yang powerful dalam analasis numerik. Pada
metode ini, akar persamaan tidak dikurung. Hanya sebuah tebakan awal yang
dibutuhkan untuk memulai proses iterasinya. Oleh karena itu, metode ini termasuk
jenis metode terbuka (open methods). Metode ini selalu konvergen jika perkiraan
awal cukup dekat dengan nilai solusi yang dicari dan konvergensinya kuadratis.
Kekurangan metode ini adalah dibutuhkannya turunan dari fungsi
Jika fungsi turunan ’
.
tidak didapatkan, maka dibutuhkan alternatif lain, yaitu
menggunakan metode Secant. Namun, dari hasil analisis Jeeves, 1958 diketahui
bahwa laju kekonvergenan metode Secant lebih lambat dibandingkan dengan
kekonvergenan metode Newton (Hoffman, 1992).
II.5.1 Penurunan Metode Newton
Metode Newton adalah suatu metode yang didasarkan pada prinsip iterasi
Newton-Raphson, yaitu pendekatan fungsi tak linear f(x) dengan hampiran linear:
l ( x) = f ( xk ) + f ' ( xk )( x − xk )
(II.49)
Dengan menyelesaikan persamaan l ( xk +1 ) = 0 akan didapat:
40
x k +1 = x k −
f ( xk )
f ' ( xk )
(II.50)
Ada dua masalah dalam menghampiri akar sebenarnya dari suatu persamaan
dengan menggunakan metode iteratif Newton, yaitu:
1. Apakah tebakan awal yang dipilih akan mengakibatkan {xk} konvergen ke
akar yang dikehendaki, dan
2. Seberapa cepat dan bagaimana mengukur kecepatan kekonvergenan dari suatu
skema iterasi.
Metode Newton dapat diturunkan berdasarkan tafsiran geometris (Chapra and
Canale, 1985). Perhatikan Gambar II.5.
Gambar II.5 Pelukisan grafis metode Newton
Sumber: Chapra and Canale, 1985
Dari Gambar II.5, turunan pertama di xi setara dengan kemiringan :
f ' ( xi ) =
f ( xi ) − 0
x i − x i +1
(II.51)
yang dapat disusun ulang kembali untuk menghasilkan
x i +1 = x i −
f ( xi )
f ' ( xi )
(II.52)
yang dinamakan rumus Newton.
Selain dengan penurunan geometri, metode Newton juga dapat diturunkan dari
deret Taylor. Deret Taylor dapat dituliskan sebagai berikut:
41
f ( xi +1 ) = f ( xi ) + f ' ( xi )( xi +1 − xi ) +
f " (ξ )
( xi +1 − xi ) 2
2
(II.53)
dimana ξ terletak sembarang dalam selang xi sampai xi+1. Dengan memotong
deret setelah suku turunan pertama:
f ( xi +1 ) = f ( xi ) + f ' ( xi )( xi +1 − xi )
(II.54)
Pada perpotongan dengan sumbu x, f ( xi +1 ) akan sama dengan nol, atau:
0 = f ( xi ) + f ' ( xi )( xi +1 − xi )
(II.55)
yang dapat diselesaikan untuk
x i +1 = x i −
f ( xi )
f ' ( xi )
(II.56)
Persamaan II.56 identik dengan Persamaan II.52 yang diturunkan dari metode
geometri.
II.5.2 Analisis Galat Metode Newton
Jika digunakan deret Taylor yang lengkap, maka akan diperoleh hasil yang eksak.
Pada kondisi ini, xi+1 = xr, dimana xr adalah nilai sejati dari akar. Dengan
mensubstitusi nilai ini bersama dengan f(xr) = 0 ke dalam Persamaan (II.53) akan
menghasilkan:
0 = f ( xi ) + f ' ( xi )( xr − xi ) +
f " (ξ )
( x r − xi ) 2
2
(II.57)
dimana suku orde ketiga dan yang lebih tinggi tetap dihilangkan.
Persamaan (II.57) dikurangi dengan Persamaan (II.55) akan memperoleh:
0 = f ' ( xi )( xr − xi +1 ) +
f " (ξ )
( xr − xi )2
2
(II.58)
Galat merupakan ketidaksesuaian antara xi +1 dan nilai sejati xr , dapat ditulis
E t ,i +1 = x r − xi +1
(II.59)
sehingga Persamaan (II.58) dapat ditulis ulang menjadi:
0 = f ' ( xi ) Et ,i +1 +
f " (ξ ) 2
E t ,i
2
(II.60)
Dengan asumsi kekonvergenan xi dan ξ pada akhirnya harus dihampiri oleh akar
xr , dan Persamaan (II.60) dapat disusun kembali agar menghasilkan:
42
E t ,i +1 =
− f " ( xr )
2
E t ,i
2 f ' ( xr )
(II.61)
Berdasarkan Persamaan (II.61), secara kasar galat sebanding dengan kuadrat galat
sebelumnya. Ini menunjukkan bahwa banyaknya posisi desimal yang benar kirakira akan berlipat dua pada tiap iterasi. Hal ini membuktikan bahwa metode
Newton memiliki sifat kekonvergenan yang kuadratis (Chapra and Canale, 1985).
II.5.3 Kendala Metode Newton
Walaupun metode Newton biasanya sangat efisien, terdapat situasi di mana
metode ini tidak berjalan dengan baik (kekonvergenan yang buruk). Selain kasus
khusus berupa akar ganda, metode ini kadangkala mengalami kendala dalam
menangani akar-akar yang sederhana, seperti dalam contoh berikut. Selain
terjadinya kekonvergenan yang lambat karena sifat alami dari fungsi tersebut,
kesulitan lain juga dapat timbul (Chapra and Canale, 1985), seperti diilustrasikan
dalam Gambar II.6.
1. Gambar II.6a memperlihatkan suatu kasus di mana suatu inflection point, yaitu
”
0, terjadi di sekitar suatu akar. Pada kasus tersebut, dengan memulai
iterasi pada x0 maka pada iterasi selanjutnya diperoleh nilai yang semakin
lama semakin menjauhi akar.
2. Gambar II.6b memperlihatkan adanya kecenderungan ayunan (oscillations)
pada metode Newton, yang memutari suatu maksimum atau minimum lokal.
3. Gambar II.6c memperlihatkan bagaimana suatu tebakan awal yang dekat ke
salah satu akar dapat meloncat ke suatu tempat beberapa akar yang lebih jauh.
Kecenderungan terjadinya hal tersebut disebabkan dijumpainya kemiringankemiringan yang hampir nol. Suatu kemiringan nol [ f ' ( x ) = 0] merupakan
masalah yang penting karena menyebabkan adanya pembagian dengan nol
dalam rumus Newton.
4. Secara grafis, Gambar II.6d memperlihatkan bahwa penyelesaiannya melesat
secara mendatar dan tidak pernah mengenai sumbu x.
Satu-satunya solusi untuk mengatasi kendala-kendala yang terdapat pada Metode
Newton adalah dengan mempunyai tebakan awal (initial guess) yang baik, yaitu
yang dekat dengan akar.
43
Gambar II.6 Ilustrasi Kendala Metode Newton
Sumber: Chapra and Canale, 1985
II.5.4 Penyelesaian Sistem Persamaan Tak Linear dengan Metode Newton
Metode Newton yang dijelaskan di atas merupakan metode yang digunakan untuk
menentukan akar-akar satu persamaan tunggal. Suatu masalah yang berkaitan
adalah melokalisasikan akar-akar himpunan persamaan tak linear (Linfield &
Penny, 1995),
f 1 ( x 1 , x 2 ,..., x n ) = 0
f 2 ( x 1 , x 2 ,..., x n ) = 0
.
.
.
.
.
.
(II.62)
44
f n ( x 1 , x 2 ,..., x n ) = 0
Penyelesaian sistem ini terdiri dari himpunan nilai-nilai
yang secara simultan
memberikan semua persamaan tersebut nilai yang sama dengan nol. Metode yang
dapat digunakan untuk menyelesaikan sistem persamaan II.62 didasarkan pada
metode Newton untuk satu persamaan tunggal. Untuk mengilustrasikan prosedur
penyelesaiannya, awalnya kita meninjau suatu sistem dua persamaan dengan dua
variabel:
f 1 (x1 , x 2 ) = 0
(II.63)
f 2 (x1 , x 2 ) = 0
Dengan diberikan suatu nilai tebakan awal x10 dan x 20 untuk x1 dan x2 , dapat
dicari nilai perkiraan baru x11 dan x 12 sebagai berikut:
x11 = x10 + Δx10
x12 = x20 + Δx20
(II.64)
Nilai perkiraan/aproksimasi tersebut akan membawa nilai dari fungsi yang ada
mendekat ke nilai nol,
(
(x
)
)≈ 0
f 1 x 11 , x 12 ≈ 0
f2
1
1
,x
1
2
atau
(II.65)
(
(x
)
)≈ 0
f 1 x 10 + Δ x 10 , x 20 + Δ x 20 ≈ 0
f2
0
1
+ Δx , x + Δx
0
1
0
2
0
2
Dengan menggunakan Deret Taylor, persamaan II.65 dapat ditulis menjadi:
(
0
)
0
∂f
⎫ Δ x 0 + ⎧ ∂ f1
⎫ Δ x 0 + ... = 0
f 1 x 10 , x 20 + ⎧⎨ 1
⎬
⎨
1
2
∂
x
∂ x 2 ⎬⎭
1⎭
⎩
⎩
(
0
1
f2 x , x
0
2
)
0
0
∂f
⎫ Δ x 0 + ⎧∂f 2
⎫ Δ x 0 + ... = 0
+ ⎧⎨ 2
⎨
1
2
∂ x 1 ⎬⎭
∂ x 2 ⎬⎭
⎩
⎩
(II.66)
Dari persamaan II.66, dengan memberikan suatu nilai awal maka dapat dihitung
hampiran berikutnya dan proses ini terus berjalan sampai diperoleh konvergensi
dengan akurasi yang hendak dicapai. Kriteria konvergensi yang lazim digunakan,
yaitu:
(Δx ) + (Δx )
r 2
1
r 2
2
<ε
(II.67)
dimana r menyatakan banyak iterasi dan ε adalah nilai error yang ingin dicapai.
45
Untuk sistem persamaan yang terdiri dari beberapa variabel dan persamaan, secara
umum sistem persamaannya dapat ditulis sebagai:
f(x) = 0
(II.68)
di mana f menyatakan kolom vektor dari n komponen (f1, f2, …, fn)T dan x adalah
suatu kolom vektor dari n komponen (x1, x2, …, xn)T.
Misalkan xr+1 menyatakan nilai x pada iterasi ke r + 1, maka dapat ditulis
x r +1 = x r + Δx r
untuk r = 0, 1, 2, ...
(II.69)
Jika xr+1 merupakan hampiran terhadap nilai x, maka
f(xr+1 ) ≈ 0 atau f(x r + Δx) ≈ 0
(II.70)
Persamaan II.70 jika diperluas dengan menggunakan Deret Taylor n-dimensi,
diperoleh:
f(x r + Δx) = f(x r ) + ∇f(x r )Δx r + ...
(II.71)
dimana ∇ adalah operator vektor dari turunan parsial. Jika suku orde kedua
(Δx )
r 2
dan yang lebih tinggi diabaikan maka dapat ditulis menjadi:
f(xr ) + JΔx r ≈ 0
(II.72)
dimana J = ∇f(x r ) . J disebut sebagai matriks Jacobi. r menyatakan bahwa
matriks dievaluasi pada tiap titik x r dan dapat ditulis dalam bentuk:
[
J = ∂f i (x r ) ∂x j
]
(II.73)
untuk i = 1, 2, 3,…, n dan j = 1, 2, 3,…, n
Dalam menyelesaikan Persamaan (II.69), nilai hampiran yang diperoleh adalah
x r +1 = x r − J −1f(x r )
untuk r = 0, 1, 2, ...
(II.74)
Matriks J bisa saja singular dan pada kasus ini invers-nya, J −1 , tidak dapat
dihitung.
46