Analisis Sistem Kerja Inverter untuk Mengubah Kecepatan
advertisement

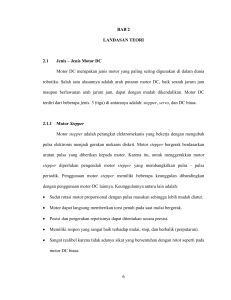
JURNAL ILMIAH ELITE ELEKTRO, VOL. 3, NO. 2, SEPTEMBER 2012: 139-143 Analisis Sistem Kerja Inverter untuk Mengubah Kecepatan Motor Induksi Tiga Phasa sebagai Driver Robot Syupriadi Nasution Jurusan Teknik Elektro, Politeknik Negeri Jakarta, Depok 16425, Indonesia E-mail: [email protected] Abstrak Tulisan ini berisi tentang analisis sistem kerja inverter pada motor induksi tiga phasa. Motor ini dipakai sebagai penggerak robot Harmo HE 250 G icc dan sebagai pengontrolnya dipergunakan controller KG 204. Penelitian bertujuan untuk mengetahui cara kerja unit inverter. Diketahui bahwa pada inverter frekuensi outputnya dapat diadjust guna mengubah kecepatan dari motor induksi tiga phasa. Dengan mengubah frekuensi menjadi lebih kecil atau lebih besar maka rentang pengaturan kecepatan putar motor akan lebih panjang atau lebih leluasa frekuensi pada robot Harmo HE 250 G icc dapat diketahui melalui suatu tindakan pengukuran menggunakan CRO atau osiloscope. Hasil pengukuran dan analisis menunjukkan bahwa inverter akan mengubah frekuensi sesuai dengan perintah atau input dari controller KG 204 yang ada pada robot. Dimana apabila input kecepatan naik maka inverter mengeluarkan output frekuensi naik dan motor induksi berputar cepat. Begitulah seterusnya juga demikian untuk keadaan sebaliknya. Abstract Inverter Working System Analysis for 3-phase Motor Induction Speed Amendment as Robot Driver. This paper describes an inverter systems analysis work on three phase induction motor. This motor used to drive a robot Harmo HE 250 G icc and used as a controller KG 204 research aimed to know the workings of the inverter unit. It is known that at the inverter output frequency can adjusted to change the speed of three phase induction motor. By changing the frequency of becoming smaller or larger then the motor speed adjustment range will be longer or more freely on the robot Harmo HE Frequency 250 G icc can be known through an act of measurement using a CRO or osiloscope. Results of measurement and analysis shows that the inverter will change the frequency according to the command or input from the existing 204 KG controller on the robot. Where if input speed up the inverter output frequency rises and the induction motor racing. That is so also so to state otherwise. Keywords: controller KG 204, CRO, inverter unit, robot Harmo HE 250 G icc, three phase induction motor seperti robot Harmo HE 250 G icc. Robot ini bekerja dan berfungsi untuk mengambil dan membawa keluar produk yang sudah jadi dari area suatu mesin cetak. Robot ini digerakkan sebuah motor induksi tiga phasa. Penulis mencoba untuk menganalisis sistem kerja inverter yang mengatur kecepatan motor induksi tiga phasa pada robot Harmo HE 250 G icc dan dikontrol oleh kontroller KG 204. Inverter disini mengubah kecepatan motor induksi tiga phasa dengan cara mengatur frekuensi outputnya. Kemudian output inverter ini menjadi source motor sehingga putaran motor dapat berubah sesuai dengan yang diinginkan robot. 1. Pendahuluan Pada abad modern sekarang ini, ilmu pengetahuan dan teknologi telah berkembang dengan pesat sekali. Seperti teknologi elektronika misalnya dimana komponennya banyak digunakan dan diaplikasikan pada bidang teknik tenaga listrik. Kemajuan tersebut tentunya didasari oleh adanya keinginan untuk mendapatkan hasil produk yang lebih baik dari hasil yang didapat sebelumnya. Industri misalnya banyak yang menggunakan aplikasi elektronika daya pada peralatan mesin-mesin cetak guna mengefektifkan proses produksinya. Terutama di industri plastik yang memproduksi cetakan plastik seperti cover sepeda motor, printer, kursi plastik, dan lain-lain. Di industri seperti ini banyak robot digunakan Permasalahannya adalah bagaimana prinsip kerja inverter dalam mengubah frekuensi outputnya dan 139 140 JURNAL ILMIAH ELITE ELEKTRO, VOL. 3, NO. 2, SEPTEMBER 2012: 139-143 menjadi input motor serta keterkaitan dengan fungsi kontroller KG 204. Penulis tidak membahas kerusakankerusakan inverter dan langkah-langkah perbaikannya secara spesifik. Permasalahan hanya fokus pada prinsif kerja inverter dimana frekuensi output-nya dapat dikontrol dari kontroller sekaligus mengatur kecepatasn putar motor tiga phase yang menjadi penggerak robot Harmo HE 250 G icc. Membuat analisis tentang sistem kerja dari inverter yang mengatur kecepatan motor. Rentang pengaturan kecepatan motor induksi menjadi lebih panjang dan bisa lebih smush mendekati halusnya pengaturan putaran motor DC. Dulu banyak teori literatur mengungkapkan bahwa pengaturan kecepatan motor induksi dapat dilakukan hanya dengan mengubah jumlah kutub pada stator motor. Juga kecepatan motor dapat berkurang jika slip motor naik (ini terjadi dengan sendirinya tergantung dari beratnya beban motor). Cycle time dalam suatu proses produksi dapat dioptimalkan bila pengaturan kecepatan putar motor induksi dilakukan dengan menggunakan inverter. Tulisan ini diharapkan dapat memberikan kontribusi yang positif terhadap lembaga pendidikan. Penting sekali penguasaan ilmu tentang elektronika daya sebab dari sini dapat dijelaskan prinsip kerja komponen elektronika pada proses pengontrolan. Inverter, struktur inverter memperlihatkan bahwa inverter dengan transistor yang menghasilkan daya dengan arus bolak-balik (AC) dengan frekuensi dari sumber komersial yaitu (50Hz atau 60Hz). Sirkuit inverter terdiri dari tiga bagian, bagian pertama sebuah sirkuit yang terbentuk dari sirkuit konverter (yang mengubah sumber AC komersial menjadi arus searah (DC) dan menghilangkan riak (ripple) pada out-put DC. Bagian kedua adalah sirkuit inverter yang mengubah arus searah menjadi arus AC tga phase dengan frekuensi beragam (dapat distel) kedua sirkuit ini disebut sirkuit utama. Bagian ketiga adalah sebuah sirkuit kontrol berfungsi sebagai pengontrol sirkuit utama. Gabungan keseluruhan sirkuit ini disebut unit inverter [1]. Terjadinya arus searah (DC), Inverter adalah piranti yang membuat AC dari DC. Prinsip dasarnya akan dijelaskan dengan model arus bolak-balik satu fasa paling sederhana. Pada model ini dijelaskan metode perubahan arus searah menjadi arus bolak-balik dimana sebuah lampu menjadi beban. Empat saklar S1, S2, S3, S4 dihubungkan ke catu daya DC dan dihidup-matikan berselang-seling untuk menghasilkan arus bolak-balik. Mengubah frekuensi. Frekuensi diubah dengan membedakan waktu hidup mati saklar, misalnya menghidupkan saklar S1 dan S4 selama 0,5 detik dan kemudian S2 dan S3 selama 0,5 detik berselang-seling akan menghasilkan arus bolak-balik dengan arah yang berbalik tiap satu detik, artinya menghasilkan catu daya AC berfrekuensi 1 Hz. Umumnya. S1-S4 dan S2-S3 dihidupkan untuk jangka waktu durasi yang sama. Umpamanya durasi dalam satu siklus satu detik, maka frekuensinya (f) adalah [2]: f = 1 / to (Hz) (1) Arus bolak- balik tiga fasa. Dasar sirkuit inverter tiga fasa. dengan menghidup-matikan S1 sampai S6, bentuk gelombang pulsa dengan interval sama melewati U-V, V-W, W-U, dan tegangan AC gelombang-segi empat diterima motor, dengan mengubah periode hidup-mati saklar, besar frekuensi output sesuai keinginan dapat diterima motor. Dengan mengubah tegangan DC, tegangan input ke motor juga dapat diubah-ubah. Sturuktur sirkuit inverter. Enam transisitor menggantikan fungsi enam saklar pada sirkuit, yang dihubungkan ke motor tiga fasa. Transisitor dihidupmatikan berselang-seling untuk menjalankan motor. Dengan mengganti urutan mati hidupnya transisitor, arah perputaran motor dapat berbalik. Fungsi transistor. Sebuah transistor terdiri dari tiga buah terminal kolektor (C), sebuah Emitor (E) , sebuah Basis (B) (Gerbang (G) untuk IGBT). Bila sinyal basis mati, C-E tidak tersambung (saklar mati). Bila arus mengalir melewati basis, C-E tersambung (saklar hidup). Transistor dapat melakukan fungsi saklar (hidup-mati) seperti saklar S dengan cepat “transistor basis tertutup” adalah istilah fungsi perlindungan inverter, dimana sinyal basis (sinyal pintu untuk IGBT) dimatikan, pada inverter, keenam transistor dimatikan bersamaan untuk memisahkan motor dan inverter, sehingga motor meluncur berhenti. Berbagai metode untuk mengubah tengan DC ke AC balok. Seperti dijelaskan dalam karakteristik motor yang dijalankan dengan inverter, tegangan harus disesuaikan dengan pola V/f untuk menjalankan sebuah motor standar dengan inverter. Karena sirkuit inverter bertransistor merupakan inverter sumber “tegangan” bagi motor. Terdapat berbagai jenis inverter seperti terlihat dibawah menurut caranya mengubah tegangan. Sirkuit konverter. Sirkuit konverter berfungsi untuk mengubah sumber tegangan AC ke tegangan DC [3]. Sirkuit konverter terdiri atas: konverter, kapasitor penghalus dan sirkuit peredam arus masuk. Sistem kontrol inverter dan fungsi auto tuning. Kontrol V/f, kontrol vektor flukisi magnetis serbaguna atau (general-purpose magnetic flux vector control), kontrol vektor fluksi magnetis tinggi (advance magnetic flux vector control) dan kontrol vektor (closed loop). JURNAL ILMIAH ELITE ELEKTRO, VOL. 3, NO. 2, SEPTEMBER 2012: 139-143 141 penghantar rotor tersebut timbul gaya yang berpasangan dan berlawanan arah. Gaya-gaya tersebut menimbulkan torsi yang cenderung memutar rotornya. Rotor berputar dengan kecepatan putar (Nr). Berputar searah putaran medan stator (Ns). Gambar 1. Bentuk Gelombang AC 1 Hz Gambar 2. Jumlah Frekuensi Lalu auto tuning berfungsi agar inverter memberi motor output gugahan sesuai kondisi konstanta rangkaian motor yang ada. Motor induksi. Dinamakan juga motor tak serempak dan banyak dipergunakan kalangan industri sebagai penggerak atau penghasil tenaga mekanis. Kontruksi motor induksi terdiri dari 1) Stator, adalah bagian motor yang diam, 2) Rotor, adalah bagian motor yang berputar. Celah udara, adalah ruangan antara stator dan rotor. Konstruksi stator terdiri dari rumah stator dari besi tuang, inti stator dari besi lunak atau baja silikon. Belitan stator dari bahan tembaga dirangkai untuk motor induksi tiga fasa tetapi juga dapat dirangkai untuk motor induksi satu fasa dan motor jenis lain. Kontruksi rotor terdiri dari:inti rotor, bahannya sama dengan inti stator yaitu baja lunak atau baja silikon. Belitan rotor bahannya dari tembaga, ada dua macam jenis rotor yaitu motor induksi dengan rotor sangkar (rotor kurung), dan motor induksi dengan rotor belitan. Prinsip kerja motor induksi tiga fasa berdasarkan induksi elektro magnetis, bila belitan atau kumparan stator diberi sumber tegangan AC tiga fasa maka arus akan mengalir pada kumparan tersebut, menimbulkan medan putar (saling berubahnya kutub magnet) seperti halnya lampu hias bingkai reklame yang nyalanya bergantian terlihat seperti berputar. Garis-garis gaya fluks dari stator tersebut yang berputar akan memotong penghantar-penghantar rotor sehingga pada penghantar tersebut timbul electro motoris force (EMF) atau gaya gerak listrik (GGL) dan disebut juga dengan tegangan induksi [4]. Berhubung kumparan rotor merupakan rangkaian yang tertutup maka pada kumparan tersebut mengalir arus. Arus yang mengalir pada penghantar rotor yang berada pada medan magnet berputar dari stator, maka pada Hubungan antara kecepatan linier dengan kecepatan sudut: v = s/t v =r.ω ω = v/r = (s/t)/r (rps) Nr = ω/60 = {(s/t)/r}/60 (rpm) (2) Unit kontroller KG 204. Kontroller KG 204 untuk robot seri HE digunakan untuk mengatur gerakan yang diinginkan, robot mengambil produk atau runner didalam mesin injection. Dengan tujuan mengejar waktu produksi lebih cepat dan menghasilkan produk yang lebih banyak tanpa mengurangi kualitas produk tersebut, diantaranya dengan mengatur timer, kecepatan dan posisi pelepasan produk [5]. Robot HARMO HE 250 G icc. Pada unit robot ini terdapat sebuah invereter sebuah motor induksi tiga phasa dan sebuah kontroller KG 204. Robot ditempatkan di atas sebuah mesin injection, robot bekerja untuk mengambil hasil produk cetakan (runner) dari dalam sebuah mesin injection lalu membawanya keluar. Aktivitas gerakannya dapat diatur menggunakan kontroller KG 204. Dengan standar gerakan seperti berikut: Setelah mesin injection selesai mencetak runner alat pencetak terbuka sembari tangan robot turun untuk mengambil runner. Tangan robot gerakan maju, tangan robot mengambil produk, tangan robot mundur, tangan robot naik keatas lalu mesin injection pencetak tertutup lagi untuk proses pencetakan produk. Tangan robot bergerak keluar untuk membuang runner terlebih dahulu. Tangan robot flip horizontal, tangan robot turun, tangan robot membuang produk dibawah. Tangan robot naik, tangan robot flip vertical. Tangan robot bergerak ke posisi semula untuk mengambil produk. Gambar 3. Controller KG 204 142 JURNAL ILMIAH ELITE ELEKTRO, VOL. 3, NO. 2, SEPTEMBER 2012: 139-143 Keunggulan menggunakan robot adalah menghemat tenaga kerja manusia, menjaga agar waktu proses pencetakan (cycle time) konstan, menjaga kualitas produk yang dicetak oleh mesin injection tetap terjaga [6]. 2. Metode Penelitian Metode penelitian yang digunakan antara lain melakukan studi pustaka, mengumpulkan bahan bacaan seperti majalah, brosur, manual book, serta literaturliteratur yang berkaitan dengan materi tulisan ini. Diskusi dengan teknisi unit robot serta melakukan pengamatan langsung lalu kemudian mengambil data pada unit robot yang diteliti. Data yang diperoleh kemudian diolah serta dianalisis. 3. Hasil dan Pembahasan Gambar 4. Langkah dan Arah Gerakan Robot Data hasil pengukuran. Diketahui bahwa pergerakan robot Harmo HE 250 G icc adalah berdasarkan program yang dibuat pada kontroller KG 204. Pemograman dilakukan melalui tahapan mengikuti petunjuk guna mendapatkan tampilan-tampilan yang berurutan agar kecepatan motor sesuai dengan kerja robot. Gambar 6. Langkah dan Arah Gerakan Robot Gambar 5. Robot HARMO HE 250 G icc Gambar 7. Grafik Pertambahan Frekuensi Terhadap Ns, Nr Dan Slip JURNAL ILMIAH ELITE ELEKTRO, VOL. 3, NO. 2, SEPTEMBER 2012: 139-143 143 Grafik 8. Pertambahan Frekuensi Terhadap Torsi yang Ditetapkan Grafik 9. Pertambahan Frekuensi terhadap Efisiensi 4. Simpulan Rentanng pengaturan kecepatan putaran motor induksi dapat dibuat leluasa menyamai motor DC. Analisis kerja inverter diperlukan, sebab frekuensi berbanding lurus dengan kecepatan putar motor induksi. Kemudian dari perhitungan kita dapat membatasi putaran motor agar tidak terlalu tinggi dari putaran nominalnya. Daftar Acuan [1] FATEC, Inverter School Text, Inverter Practical Course, Mitsubishi Electric Corporation, Tokyo, Japan, 2006, p.211. [2] E. Santoso, Analisis Sistem Kerja dari Inverter, Skripsi, 2008. [3] F.D. Petruzella, Elektronik Industri, Andi, Yogyakarta, 2001, p.722. [4] Zuhal, Dasar Tenaga Listrik dan Elektronika Daya, Gramedia. Pustaka Utama, Jakarta, 2002, p.249. [5] Harmo, Manual Book Controller KG 101 for Robot HARMO HE 250 G icc, http://www.harmonet.co.jp/en/products/robots/, 2011. [6] Harmo, Manual Book Mekanical Robot HARMO HE 250 G icc, http://www.harmonet.co.jp/en/products/robots/ex/ex250.htm, 2011.