bab i pendahuluan
advertisement

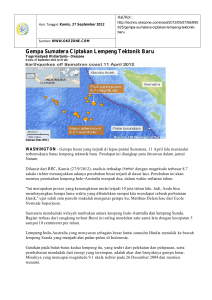
BAB I PENDAHULUAN I.1. Latar Belakang Sumatera merupakan salah satu pulau di Indonesia dengan dinamika bumi yang tinggi. Hal ini disebabkan di wilayah ini terdapat pertemuan dua lempeng tektonik yaitu Lempeng Indo-Australia dan Lempeng Eurasia. Pertemuan kedua lempeng ini membentuk zona subduksi yang memiliki arah dan jenis penunjaman yang tidak seragam (Prawirodirdjo, 2000). Zona subduksi di Sumatera merupakan wilayah yang paling sering melepaskan energi gempabumi (Setyonegoro, dkk., 2012). Kepulauan Mentawai terletak di bagian paling barat Sumatera dan termasuk wilayah zona subduksi Segmen Mentawai. Kepulauan ini terdiri atas tiga pulau utama yang berpenghuni yaitu Pulau Siberut, Pulau Sipora, dan Pulau Pagai. Gempa tektonik sering terjadi di ketiga pulau ini. Pada tanggal 10 Juli 2013 Kepulauan Mentawai kembali diguncang gempa tektonik. Gempa tektonik ini terjadi secara berturut dengan kekuatan 5,2 SR dan 5,3 SR. Kedua gempa tektonik ini terjadi sebagai akibat adanya aktivitas sesar naik di zona subduksi Segmen Mentawai. Meskipun tidak menimbulkan kerusakan dan korban jiwa, namun gempa tektonik yang terjadi menimbulkan trauma masyarakat di Kepulauan Mentawai. Berdasarkan penelitian yang dilakukan oleh Bock dan Prawirodirdjo (2003) menunjukkan bahwa total energi yang dilepaskan di sepanjang Segmen Mentawai sampai tahun 2007 tidak lebih dari sepertiga energi yang terlepas dari total energi yang sudah terkumpul lagi sejak gempabumi tahun 1797 dan 1833. Sementara itu, gempabumi memiliki sifat berulang. Hal ini menunjukkan bahwa gempabumi akan terjadi lagi di masa yang akan datang dalam periode tertentu. Perulangan gempa tersebut dinamakan earthquake cycle (Sarsito, dkk., 2005). Oleh karena itu, gempa tektonik Mentawai masih memiliki resiko perulangan gempa yang tinggi. Satu earthquake cycle memiliki beberapa fase gempabumi yaitu interseismic, pre-seismic, coseismic, dan post-seismic. Satu cycle gempabumi ini dapat berlangsung dalam kurun waktu seratus tahun (Sarsito, dkk., 2005). Data 1 pengamatan geodetik seperti data pengamatan stasiun GPS kontinyu dapat mendokumentasikan dengan baik fase-fase gempabumi. Data pengamatan geodetik ini juga dapat memberikan besar deformasi dari suatu blok kerak bumi pada saat fase coseismic maupun post-seismic. Pulau Sumatera terdapat stasiun-stasiun GPS yang melakukan pengukuran geodetik secara kontinyu. Stasiun ini dikenal dengan stasiun SuGAr (Sumatran GPS Data Array). Data pengamatan stasiun ini dapat digunakan untuk memantau deformasi di sekitar Pulau Sumatera. Gempabumi tektonik yang sering terjadi di Kepulauan Mentawai menunjukkan adanya dinamika bumi yang tinggi di wilayah Segmen Mentawai, sehingga diperlukan pengkajian objek alam dan buatan manusia dalam ukuran, dimensi, dan posisi yang berubah dalam ruang dan waktu. Pengkajian ini dapat didekati dengan konsep yang menyatakan bahwa pergerakan masa bumi dapat menyebabkan perubahan orientasi sistem referensi geodetik, sehingga posisi titik di permukaan bumi dan kecepatannya mengalami perubahan. Kedua perubahan ini digunakan untuk mengetahui pergerakan lempeng tektonik (Grafarend dalam Widjajanti, 1997). Analisis perubahan posisi dan kecepatan titik pantau merupakan bagian dari analisis deformasi. Meskipun deformasi merupakan dinamika bumi skala lokal, namun deformasi dapat ditafsirkan sebagai pergerakan suatu titik pada suatu benda yang bersifat absolut atau relatif (Widjajanti, 1997). Terdapat dua metode untuk menganalisis deformasi yaitu analisis geometrik dan interpretasi fisik. Analisis geometrik dilakukan dengan menggunakan data pengamatan geodetik, sedangkan interpretasi fisik dilakukan dengan menggunakan status fisik dari materi yang terdeformasi. Penelitian ini menggunakan metode analisis geometrik karena proses analisis deformasi menggunakan data pengamatan geodetik stasiun SuGAr. Berdasarkan perhitungan total energi yang dilepaskan di sepanjang Segmen Mentawai sampai tahun 2007 dan adanya kemungkinan terjadinya perulangan gempa tektonik (Bock dan Prawirodirdjo, 2003), maka diperlukan pemantauan pergerakan lempeng tektonik di Kepulauan Mentawai. Pemantauan pergerakan lempeng tektonik ini dapat dilakukan dengan melakukan analisis deformasi geometrik di Segmen Mentawai. Oleh karena itu, penelitian ini menganalisis besar dan arah deformasi geometrik Segmen Mentawai pada fase interseismic, coseismic dan post-seismic gempa tektonik 10 Juli 2013. 2 I.2. Rumusan Masalah Adanya aktivitas dua lempeng tektonik di zona subduksi Segmen Mentawai telah menimbulkan gampa tektonik di Kepulauan Mentawai. Tercatat pada tanggal 10 Juli 2013 gempa tektonik kembali terjadi secara berturut-turut dengan kekuatan 5,2 dan 5,3 SR. Gempa tektonik ini menunjukkan adanya aktivitas tektonik yang tinggi di wilayah tersebut. Selain itu, berdasarkan perhitungan total energi yang dilepaskan di sepanjang Segmen Mentawai, mengakibatkan masih tingginya potensi perulangan gempa tektonik besar di wilayah tersebut. Oleh karena itu, diperlukan pemantauan aktivitas tektonik di zona subduksi Segmen Mentawai, salah satunya dengan pemantauan deformasi aspek geometrik di wilayah tersebut. Namun saat ini belum ada pemantauan deformasi akibat gempa tektonik 10 Juli 2013 di Segmen Mentawai, baik deformasi pada fase interseismic, coseismic maupun post-seismic. I.3. Pertanyaan Penelitian Pertanyaan dalam penelitian ini adalah sebagai berikut : 1. Berapa besar dan arah deformasi Segmen Mentawai pada fase interseismic, coseismic dan post-seismic gempa tektonik 10 Juli 2013? 2. Bagaimana perubahan koordinat stasiun pemantau di Segmen Mentawai akibat gempa tektonik 10 Juli 2013? I.4. Tujuan Penelitian Berdasarkan latar belakang yang telah diuraikan, tujuan penelitian ini adalah : 1. Menentukan besar dan arah deformasi stasiun pemantau di Segmen Mentawai pada fase interseismic, coseismic dan post-seismic gempa tektonik 10 Juli 2013. 2. Mengevaluasi perubahan koordinat stasiun pemantau di Segmen Mentawai akibat gempa tektonik 10 Juli 2013. 3 I.5. Manfaat Penelitian Hasil dari penelitian ini adalah informasi besar dan arah deformasi aspek geometrik tiga pulau utama Kepulauan Mentawai yang berada di Segmen Mentawai, serta perubahan koordinat stasiun pemantau selama fase-fase gempa tektonik Juli 2013. Penelitian ini menggunakan data pengamatan GPS kontinyu selama 1 tahun yaitu pada tahun 2013, sehingga informasi yang diperoleh dari penelitian ini dapat digunakan untuk memantau aktivitas tektonik yang terjadi di wilayah Segmen Mentawai pada tahun 2013. I.6. Ruang Lingkup Penelitian Ruang lingkup dalam penelitian ini sebagai berikut : 1. Penelitian ini menggunakan 10 stasiun SuGAr dengan lima stasiun terletak di tiga pulau utama Kepulauan Mentawai, yaitu BSAT, SMGY, PKRT, TLLU, TNTI, TIKU, PARY, PSKI, TRTK, dan MKMK. 2. Data pengamatan 10 stasiun SuGAr diolah dengan menggunakan perangkat lunak GAMIT/GLOBK 10.5. 3. Analisis deformasi geometrik menggunakan analisis pergeseran posisi titik pantau dengan uji kesebangunan jaring dan uji pergeseran titik pantau pada fase interseismic, coseismic, dan post-seismic gempa tektonik 10 Juli 2013. 4. Evaluasi perubahan koordinat stasiun pemantau Segmen Mentawai dilakukan dengan uji statistik dan evaluasi hasil plotting koordinat selama tahun 2013. I.7. Tinjauan Pustaka Pulau Sumatera merupakan pulau di Indonesia yang memiliki dinamika bumi yang tinggi karena adanya pertemuan Lempeng Indo-Australia dan Eurasia dengan kecepatan 5 s.d 6 cm/tahun (Prawirodirdjo, 2000). Aktivitas tektonik ini merupakan aktivitas sesar naik di zona subduksi Pulau Sumatera. Tingginya aktivitas tektonik di wilayah ini mengakibatkan gempa bumi yang sering terjadi di sekitar wilayah pertemuan Lempeng dan zona subduksi. Aktivitas tektonik ini sering menimbulkan gempabumi di sekitar zona subduksi. 4 Beberapa gempa besar yang terjadi di Pulau Sumetera adalah gempa pada tahun 1833 dengan kekuatan 8,9 SR dan pada tahun 1797 dengan kekuatan 8,3 s.d 8,7 SR (Setyonegoro,dkk., 2012). Kedua gempa tektonik tersebut membangkitkan tsunami besar yang menyapu perairan Sumatra barat dan Bengkulu. Selain itu, pada tanggal 25 Oktober 2010 terjadi gempa Mentawai dengan magnitude 7,2 SR di kedalaman 10 km, tepatnya pada posisi 3,61 LS s.d 99,93 BT (kurang lebih 78 km baratdaya Pagai Selatan). Gempa Mentawai pada tahun 2010 ini mengakibatkan pengaruh pergerakan horisontal dan vertikal di Segmen Mentawai. Pergerakan yang cukup besar teramati 10 s.d 30 cm untuk horisontal dan 1 s.d 6 cm untuk vertikal yang berada di sekitar pusat gempa. Hasil yang diperoleh menunjukkan gempa Mentawai masih memiliki pengaruh post-seismic (Rusmen, 2012). Hasil pemodelan run-up tsunami akibat gempa mentawai ini memiliki distribusi 6 s.d 8 m dan relatif tinggi di Pulau Pagai Selatan serta menurun di Pulau Pagai Utara (Setyonegoro, dkk., 2012). Perulangan gempa dapat terjadi dalam kurun waktu tertentu. Fase-fase perulangan gempabumi dapat menghasilkan deformasi permanen. Hal ini didukung oleh penelitian yang dilakukan oleh Sarsito dkk (2005). Pada penelitian tersebut membahas mengenai implikasi coseismic dan post-seismic horisontal displacement gempa Aceh 2004 terhadap status geometrik data spasial wilayah Aceh dan sekitarnya. Hasil penelitian tersebut menunjukkan bahwa fase coseismic gempa Aceh 2004 menghasilkan deformasi yang bervariasi sampai mencapai nilai 2,7 m. Fase post-seismic gempa Aceh 2004 menghasilkan deformasi sebesar 15 cm setelah 90 hari pasca gempa tektonik. Selain itu, vektor pergerakan pada fase coseismic berlawanan arah dengan vektor pergeseran pada fase interseismic. Meskipun deformasi akibat gempa tektonik Aceh 2004 mencapai fraksi meter, namun pengaruhnya terhadap status geometrik data spasial wilayah Aceh masih tergantung pada kebutuhan atau spesifikasi teknis kegiatan survei dan pemetaan yang dilakukan. Pulau Sumatera memiliki persebaran stasiun kontrol untuk memantau aktivitas tektonik di pulau ini, yaitu stasiun SuGAr. Stasiun-stasiun ini diukur secara kontinyu dengan teknologi GPS. Kualitas data stasiun SuGAr dapat dilihat dari data time series masing-masing stasiun. Data stasiun SuGAr ini dapat digunakan dalam pemantauan deformasi wilayah Sumatera. Salah satu penggunaannya adalah untuk 5 pemantauan deformasi Sumatera akibat gempa cekungan wharton (Pratama,dkk., 2013). Penelitian tersebut bertujuan untuk menghitung vektor pergeseran dari plot time series data pengamatan stasiun GPS SuGAr sebelum dan sesudah terjadi gempa di laut sekitar zona subduksi Sumatera. Pengolahan data SuGAr (stasiun UMLH) Provinsi Aceh selama bulan April dalam penelitian deformasi ini menunjukkan bahwa stasiun UMLH mengalami pergeseran ke arah utara (X) sebesar 9,8 cm dan pergeseran ke arah timur (Y) sebesar 16,7 cm. Selain penelitian yang dilakukan oleh Pratama dkk (2013), beberapa penelitian deformasi Pulau Sumatera juga dilakukan oleh beberapa peneliti untuk memantau pergerakan lempeng tektonik. Beberapa penelitian yang telah berhasil dilakukan diantaranya adalah penelitian Prawirodirdjo (2010), Sugiyanto dkk (2011) dan Permana (2012). Penelitian yang dilakukan oleh Prawirodirdjo (2010) bertujuan untuk menganalisis segmentasi patahan siklus gempa bumi pada megathrust Sumatera, yang terjadi pada 26 Desember 2004 Mw 9.1 Andaman, 28 Maret 2005 Mw 8.7 Nias, dan 12 September 2007 Mw 8.4 gempa Mentawai menggunakan data pengamatan stasiun SuGAr (Sumatran GPS Data Array). Hasil penelitian Prawirodijdjo (2010) adalah megathrust Sumatra atau Sesar Sumatera mengalami segmentasi, sebuah karakteristik yang dapat terus bertahan selama beberapa siklus gempa. Berdasarkan perbandingan medan kecepatan sampai tahun 2011, zona subduksi Kepulauan Batu dan Enggano telah mengalami pergeseran bebas setelah tahun 2011, sehingga fase interseismic gempa tektonik di zona subduksi ini dapat bervariasi setiap waktu. Penelitian deformasi permukaan patahan aktif Seulimum dan Segmen Aceh yang dilakukan oleh Sugiyanto dkk (2010) menggunakan data pengamatan GPS yang diikatkan ke stasiun CORS yang berada di Sampali dan Aceh. Tujuan dari penelitian tersebut adalah melakukan pemutakhiran data perubahan koordinat pada jaringan pengamatan GPS wilayah Aceh, mempelajari karakteristik patahan aktif segmen Aceh dan segmen Seulimum, serta menghitung besar pergeseran post-seismic yang terjadi setelah gempa Aceh 2004. Hasil dari penelitian tersebut menunjukkan bahwa wilayah Aceh masih dipengaruhi oleh aktivitas post-seismic gempa Aceh 2004 dengan rata-rata besar pergeserannya adalah 10 mm/tahun. Deformasi post-seismic 6 yang masih terus berlangsung akibat gempa Aceh 2004 dapat berimplikasi pada potensi kegempaan pada patahan aktif yang ada di daratan Aceh. Analisis deformasi Pulau Sumatera juga dilakukan oleh Permana (2012). Penelitian tersebut bertujuan untuk mengetahui dampak gempa Padang 2009 terhadap 28 stasiun SuGAr dan mengitung besar regangan yang ditimbulkan. Hasil penelitian tersebut menunjukkan bahwa vektor pergeseran titik-titik pengamatan GPS di Sumatera cenderung bergerak ke arah timurlaut yang mengindikasikan adanya akumulasi energi, sedangkan vektor pergeseran yang mengarah ke baratdaya mengindikasikan adanya pelepasan energi. Kecepatan vektor pergeseran rata-rata dari titik-titik pengamatan GPS sebelum gempa adalah sebesar 0,033 m/tahun dan setelah gempa sebesar 0,031 m/tahun dengan pergerakan mengarah ke timurlaut. Regangan di sekitar daerah kajian menunjukkan adanya pola kompresi dengan nilai maksimum sebesar 1,226 x 10-7 strain yang mengindikasikan potensi terjadinya gempa bumi. Penelitian Permana (2012) ini mendukung penelitian yang dilakukan oleh Mubyarto (2008) yang bertujuan untuk menganalisis pola deformasi interseismic gempa Bengkulu 2007 dari data GPS kontinyu SuGAr. Hasil dari penelitian Mubyarto adalah berdasarkan hasil analisis pola deformasi interseismic sebelum gempa Bengkulu 2007 dengan menggunakan data GPS kontinyu SuGAr (The Sumatran GPS Array), velocity rate titik-titik yang berada di sepanjang kepulauan Mentawai adalah 2 cm/tahun, dan 1 cm/tahun untuk titik-titik yang berada di sepanjang pantai barat Pulau Sumatra. Arah pergerakan pada fase interseismic gempa Bengkulu 2007 ini bergerak ke arah timur atau searah dengan pergerakan lempeng Indo-Australia. Penelitian deformasi pada fase-fase gempa tektonik juga telah banyak dilakukan di negara lain yang memiliki tingkat potensi gempabumi tinggi, seperti China. Salah satu penelitian yang telah dilakukan di China adalah penelitian Hongbo dkk (2013). Penelitian tersebut bertujuan untuk mengetahui besar deformasi gempabumi Lushan yang memiliki kekuatan 7,0 SR. Gempabumi ini terjadi setelah gempa 3,0 SR, 5 SR, dan 5,4 SR. Hasil penelitian tersebut menunjukkan bahwa fase coseismic gempabumi Lushan mengakibatkan deformasi horisontal kurang dari 10 mm dan deformasi vertikal kurang dari 5 mm. 7 Beberapa penelitian deformasi yang telah disebutkan memerlukan perhitungan data dengan ketelitian yang tinggi. Penelitian yang menggunakan data pengamatan GPS untuk keperluan deformasi, juga memerlukan perangkat lunak dengan ketelitian tinggi atau disebut juga dengan perangkat lunak scientific, salah satunya adalah GAMIT/GLOBK. Pengolahan data pengamatan GPS dengan GAMIT/GLOBK menghasilkan ketelitan yang tinggi karena memperhitungkan berberapa macam koreksi. Terdapat tiga file koreksi yang harus ada dalam setiap pengolahan, yaitu koreksi pasut, koreksi atmosfer, dan pemodelan cuaca. Pengolahan data pengamatan menggunakan perangkat lunak GAMIT/GLOBK untuk keperluan deformasi pulau di wilayah Sumatera dapat menghasilkan ketelitian dalam fraksi milimeter (Rusmen, 2012). Hasil penelitian tersebut juga didukung dengan penelitian yang dilakukan oleh Panuntun (2012). Hasil penelitiannya menunjukkan ketelitian hasil pengolahan GAMIT/ GLOBK untuk penentuan posisi anjungan minyak lepas pantai mencapai fraksi milimeter. Keunggulan dan perbedaan penelitian ini dengan penelitian sebelumnya adalah penelitian ini menganalisis deformasi geometrik Segmen Mentawai akibat gempa tektonik 10 Juli 2013 dengan menggunakan 10 stasiun SuGAr. Analisis deformasi geometrik dilakukan pada fase interseismic, fase coseismic, dan fase post-seismic. Selain itu, penelitian ini juga mengevaluasi perubahan koordinat stasiun SuGAr akibat gempa tektonik 10 Juli 2013 dengan mengolah data pengamatan 10 stasiun SuGAr selama tahun 2013, termasuk pengolahan data pengamatan stasiun SuGAr selama satu jam pengamatan untuk mengetahui pergeseran koordinat yang signifikan secara statistik. I.8. Landasan Teori I.8.1. Tektonik Lempeng Lempeng merupakan bagian materi penyusun bumi yang paling atas. Lempeng ini memiliki ketebalan hingga 100 km (Stein, 2003). Bagian-bagian dari bumi ditunjukkan pada Gambar I.1. 8 Gambar I. 1. Bagian Bumi (USGS, 2015) Gambar I.1 menunjukkan bagian dalam bumi. Bagian atas bumi terdapat lapisan lithosphere yang terdiri atas kerak bumi dan mantel bumi yang bersifat kaku dan padat. Bagian lithosphere ini terbagi menjadi lempeng-lempeng tektonik. Lempeng tektonik terdiri atas lempeng benua dan lempeng samudera. Teori lempeng tektonik erat kaitannya dengan teori pergerakan benua. Sekitar 250 juta tahun yang lalu, lempeng-lempeng tektonik tergabung dalam satu benua besar yaitu Pangea. Menurut teori pergerakan lempeng benua, satu benua besar tersebut pecah menjadi dua benua besar yaitu Laurasia dan Gondwana. Kemudian kedua benua besar tersebut terus mengalami perpecahan hingga membentuk daratan dan samudera seperti sekarang. Gambar I.2 menunjukkan proses pecahnya lempeng benua pertama yaitu Pangea menurut teori pergerakan lempeng benua. Proses perpecahan lempeng benua ini membentuk membentuk daratan dan samudera seperti sekarang, sehingga daratan yang terbentuk sekarang dapat digabungkan kembali seperti puzzle. 9 Gambar I. 2. Teori pergerakan lempeng benua (USGS, 2015) Proses terbentuknya dua lempeng tektonik, yaitu lempeng benua dan lempeng samudera dimulai dari adanya gaya konveksi mantel pada lempeng benua. Gaya konveksi mantel ini merupakan gaya yang ditimbulkan karena adanya tekanan panas bumi. Selama berjuta-juta tahun, adanya gaya konveksi mantel ini mengakibatkan timbulnya suatu celah dan memisahkan satu lempeng benua menjadi dua bagian. Seiring bertambahnya waktu celah antar lempeng benua tersebut menjadi semakin lebar dan membentuk lempeng samudera. Terdapat tujuh lempeng utama penyusun permukaan bumi yaitu lempeng Afrika, lempeng Antartika, lempeng Indo-Australia, lempeng Eurasia, lempeng Amerika Utara (North-America), lempeng Amerika Selatan, dan lempeng Pasifik (Kious dan Tilling, 1996). 10 Lempeng benua dan lempeng samudera yang terbentuk di lapisan atas bumi terus mengalami pergerakan hingga membentuk suatu zona batas antar lempeng dan sistem sesar. Zona batas antar lempeng dibagi menjadi tiga macam, yaitu zona batas divergent, zona batas convergent, dan zona batas transform. Gambar I. 3. Zona batas lempeng tektonik (Kious dan Tilling, 1996) Gambar I.3 menunjukkan zona-zona batas antar lempeng tektonik. Zona batas divergent merupakan zona batas pertemuan antara dua lempeng tektonik dengan pergerakan saling menjauhi. Zona batas convergent merupakan zona batas pertemuan antara dua lempeng tektonik dengan pergerakan saling bertumbukan. Tumbukan antar lempeng ini bisa terjadi antara lempeng benua dengan lempeng benua, lempeng benua dengan lempeng samudera, dan lempeng samudera dengan lempeng samudera. Sedangkan zona batas transform merupakan zona batas pertemuan lempeng tektonik yang bergerak saling berpapasan. Gambar I.4. merupakan zona batas pertemuan dua lempeng tektonik, yaitu lempeng Eurasia dan lempeng North-America. Zona batas pertemuan antara kedua lempeng ini termasuk kedalam zona batas divergent. Hal ini ditunjukkan dengan adanya arah pergeseran kedua lempeng tektonik yang saling menjauhi. 11 Gambar I.4. Zona batas divergent (USGS, 2015) Gambar I.5 memberikan gambaran zona convergent yang dibentuk oleh lempeng samudera dan lempeng benua. Karena lempeng samudera memiliki rapat massa yang lebih besar dari pada lempeng benua, maka lempeng samudera menyusup ke bawah. Pergerakan tersebut mengindikasikan adanya akumulasi energi hingga pada suatu saat dapat dilepaskan secara tiba-tiba. Pelepasan energi secara tiba-tiba ini menimbulkan gempa tektonik. Oleh karena itu, zona batas convergent berpotensi dapat menimbulkan gempa tektonik. Selain itu, zona batas convergent biasanya juga diikuti dengan terbentuknya gunung api di sekitar zona tersebut. Gambar I.5. Zona batas convergent (USGS, 2015) 12 I.8.2. Zona Subduksi Lempeng Tektonik Pulau Sumatera Zona subduksi Pulau Sumatera terbentuk karena adanya tumbukan Lempeng Indo-Australia dan Eurasia. Lempeng Indo-Australia bergerak ke utara-timurlaut, sedangkan lempeng Eurasia yang relatif bergerakan ke arah baratdaya. Kedua aktivitas Lempeng tektonik ini ditunjukkan pada Gambar I.6. Gambar I.6. Zona subduksi Pulau Sumatera (modifikasi dari EOS, 2012) Gambar I.6 menunjukkan aktivitas tumbukan lempeng antara lempeng IndoAustralia dan Eurasia. Lempeng Indo-Australia yang rapat massanya lebih besar ketika bertumbukan dengan lempeng Eurasia di zona subduksi menyusup ke bawah. Gerakan tektonik tersebut menyebabkan adanya gesekan di selubung bumi. Pergerakan tersebut juga mengakibatkan adanya penumpukan energi di zona subduksi sehingga terjadi tarikan, tekanan, dan pergeseran di wilayah tersebut. Pada saat batas elastisitas lempeng terlampaui, maka terjadi patahan batuan yang diikuti lepasnya energi secara tiba-tiba. Aktivitas tektonik ini menimbulan getaran partikel ke segala arah yang disebut gelombang gempa tektonik (Pratama, dkk., 2013). Pulau Sumatera terdapat tiga zona subduksi yaitu Sesar Sumatera (Sumatran Fault), Segmen Mentawai, dan Sunda Megathrust. Ketiga zona subduksi ini terbentuk karena aktivitas lempeng Indo-Australia dan Eurasia. Zona subduksi Segmen Mentawai di Kepulauan Mentawai dapat dilihat pada Gambar I.7. 13 TIKU TNTI BTET PARY PSKI TLLU TRTK Gambar I. 7. Zona subduksi Segmen Mentawai (modifikasi dari EOS, 2012) Gambar I.7 menunjukkan zona subduksi Segmen Mentawai karena aktivitas tumbukan lempeng tektonik Indo-Australia dan Eurasia. Pada Gambar I.7 dapat dilihat bahwa Segmen Mentawai meliputi daerah tiga pulau utama Kepulauan Mentawai yaitu Pulau Siberut, Pulau Sipora, dan Pulau Pagai. Lokasi tiga pulau utama berpenghuni Kepulauan Mentawai inilah yang sering terguncang gempa tektonik. I.8.3. Pergerakan Blok Sunda Pergerakan lempeng tektonik erat kaitannya dengan teorema euler fixed point atau yang dikenal dengan nama euler pole. Teorema euler fixed point menjelaskan bahwa setiap pergerakan lempeng tektonik di permukaan bumi berotasi mengelilingi suatu sumbu atau pole (Rusmen, 2012). Stasiun SuGAr yang digunakan dalam penelitian ini terdapat di suatu blok lempeng yang dikenal dengan Blok Sunda. Teorema euler menjelaskan bahwa perubahan kecil dari suatu posisi yang terdefinisi di suatu lempeng dapat diuraikan berdasarkan sumbu rotasinya (Kuncoro, 2013). Parameter rotasi euler terdiri atas kutub euler (lintang dan bujur) serta kecepatan sudut rotasi. Ilustrasi parameter rotasi euler ditunjukkan Gambar I.8. 14 Z (+) ω V Y (+) Bumi X (+) Gambar I. 8. Parameter rotasi euler (modifikasi dari Kuncoro, 2013) Gambar I.8 menunjukkan parameter rotasi euler. Kutub euler ditunjukkan oleh lingkaran kuning, sedangkan blok lempeng ditunjukkan oleh kotak warna biru. Kecepatan sudut rotasi blok dinyatakan sebagai ω, dan kecepatan blok dinyatakan sebagai V. Dalam model parameter rotasi euler ini bumi dimodelkan dalam bentuk bulat atau bola. Berdasarkan penelitian Kuncoro (2013), solusi parameter rotasi Blok Sunda adalah 46,202 ± 0,620 oN untuk lintang kutub euler, dan -85,899 ± 0,256 oE untuk bujur kutub euler. Sedangkan kecepatan sudut rotasi Blok Sunda adalah 0,370 ± 0,004 derajat/juta-tahun. Estimasi parameter Blok Sunda tersebut menunjukkan bahwa blok sunda bergerak berlawanan arah jarum jam dengan kecepatan 25 s.d 35 mm/tahun. Arah kecepatan pergerakan Blok Sunda cenderung ke arah timur (Permana, 2012). Arah pergerakan lempeng tektonik di Pulau Sumatera menjadi lebih jelas apabila efek pergerakan Blok Sunda dihilangkan dalam pengolahan data pengamatan GPS. I.8.4. Fase Gempabumi Gempabumi memiliki sifat berulang. Siklus perulangan ini sering disebut dengan earthquake cycle. Terdapat beberapa fase dalam satu siklus perulangan gempa, yaitu interseismic, pre-seismic, coseismic, dan post-seismic. Satu siklus 15 gempabumi ini biasanya berlangsung selama kurun waktu 100 tahun (Sarsito, dkk., 2005). Fase interseismic merupakan fase awal dari suatu siklus gempabumi. Pada fase ini, energi dari dalam bumi menggerakkan lempeng dan energi mulai terakumulasi di bagian batas antar lempeng dan patahan. Fase pre-seismic merupakan fase yang terjadi sesaat sebelum gempabumi terjadi (Sarsito, dkk., 2005). Fase coseismic merupakan fase ketika gempa utama terjadi. Pada fase ini getaran pada bumi dirasakan paling kuat seiring terjadinya pelepasan energi secara tiba-tiba. Ketika fase coseismic terjadi, maka kerak bumi dapat terdeformasi secara permanen sampai orde meter. Fase post-seismic terjadi ketika sisa-sisa energi gempa terlepaskan dan kondisi kembali pada tahap kesetimbangan awal. Fase ini masih dapat menghasilkan deformasi secara permanen mencapai orde sub-meter (Sarsito, dkk., 2005). New Interseismic Pre-seismic Post-Seismic Co-seismic Interseismic Gambar I. 9. Grafik satu earthquake cycle (modifikasi dari Sarsito, dkk., 2005) Gambar I.9. menunjukkan fase-fase gempabumi dalam satu earthquake cycle yaitu fase interseismic, pre-seismic, co-seismic, dan post-seismic. Ketika fase postseismic berakhir dan kerak bumi kembali dalam kondisi kesetimbangan awal, maka satu siklus gempabumi telah berakhir dan fase interseismic baru dimulai kembali. Hasil pengamatan stasiun GPS dapat digunakan untuk pemantauan aktivitas tektonik. Dari hasil perhitungan data pengamatan GPS, fenomena fase interseismic ditunjukkan dengan vektor pergeseran titik pantau GPS selama selang waktu tertentu. 16 Arah pergerakan pada fase interseismic cenderung searah dengan arah pergerakan lempeng samudera terhadap lempeng benua (Sarsito, dkk., 2005). Pada fase coseismic, hasil pengataman data GPS berlawanan dengan fase interseismic (Permana, 2012). Sedangkan pada fase post-sesismic, hasil pengamatan data GPS juga menunjukkan hasil yang berlawanan dengan fase interseismic (Mubyarto, 2008). I.8.5. Gempa Tektonik 10 Juli 2013 Gempa tektonik diakibatkan karena adanya pelepasan energi secara tiba-tiba pada zona batas pertemuan lempeng tektonik. Gempa tektonik dengan kekuatan 5,2 dan 5,3 SR terjadi di Kepulauan Mentawai pada tanggal 10 Juli 2013. Gempa tektonik tersebut terjadi secara berturut-turut pada dini hari pukul 00:04:16 WIB dan 00:14:23 WIB (BMKG, 2013). Gempa pertama dengan kekuatan 5,3 SR berpusat di 3,41 LS dan 100,21 BT dengan kedalaman 32 km. Gempa tektonik ini berpusat di sekitar kawasan Segmen Mentawai, tepatnya di kawasan Pulau Pagai. Diperkirakan energi yang tersimpan pada zona batas lempeng ini sudah mengecil karena telah dilepaskan pada gempa tektonik tahun 2010. Namun, di sekitar kawasan Pulau Siberut masih menyimpan energi yang besar sehingga masih berpotensi timbulnya gempa tektonik (BMKG, 2013). Pusat gempa tektonik 10 Juli 2013 yang pertama ditunjukkan Gambar I.10. Pusat Gempa Gambar I. 10. Pusat gempa tektonik (5,3 SR) 10 Juli 2013 (BMKG, 2013) 17 Gempa tektonik 10 Juli 2013 kedua dengan kekuatan 5,2 SR berpusat di 3,34 LS dan 100,33 BT dengan kedalaman 22 km. Pusat gempa ini berjarak ± 1 km dari pusat gempa yang pertama. Pusat gempa kedua ini ditunjukkan pada Gambar I.11. Pusat Gempa Gambar I. 11. Pusat gempa tektonik (5,2 SR) 10 Juli 2013 (BMKG, 2013) Meskipun tidak menimbulkan potensi tsunami dan tidak menimbulkan kerusakan serta korban jiwa, namun kedua gempa tektonik yang terjadi menimbulkan trauma masyarakat di Kepulauan Mentawai. Selain itu, masih adanya potensi terjadinya pelepasan energi yang dapat menimbulkan gempa di sekitar Kepulauan Mentawai, terutama Pulau Siberut, menjadi suatu hal yang harus diperhatikan dan diwaspadai oleh masyarakat maupun pemerintah. I.8.6. Global Positioning System (GPS) GPS (Global Positioning System) merupakan sistem radio navigasi dan penentuan posisi menggunakan satelit yang didesain untuk untuk memberikan posisi dan kecepatan tiga dimensi yang teliti serta informasi waktu secara kontinyu di seluruh dunia. Teknologi GPS ini terdiri atas tiga segmen, yaitu segmen kontrol, segmen angkasa, dan segmen pengguna. 18 Gambar I. 12. Tiga segmen teknologi GPS (El-Rabbany, 2002) Gambar I.12 menunjukkan tiga segmen yang ada dalam teknologi GPS. Segmen satelit terdiri atas satelit-satelit GPS yang beredar pada orbitnya masingmasing. Orbit satelit GPS memiliki inklinasi 55o dengan ketinggian rata-rata adalah 20.200 km. Satu lintasan orbit satelit terdapat empat satelit GPS. Masing-masing satelit GPS dilengkapi dengan jam atom yang digunakan untuk perhitungan jarak satelit ke receiver GPS. Segmen kontrol terdiri atas stasiun-stasiun pemantau orbit satelit GPS. Segmen kontrol ini menentukan informasi broadcast ephemeris yang digunakan dalam perhitungan koordinat. Secara spesifik segmen kontrol terdiri atas Ground Control Stations (GCS), Monitor Stations (MS), Prelaunch Compatibility Stations (PCS), dan Master Control Stations (MCS) (Abidin, 1995). Segmen pengguna atau dalam Gambar I.12 dikenal dengan user segment merupakan pihak pengguna dari teknologi GPS. Dalam segmen pengguna, diperlukan suatu receiver GPS untuk menangkap sinyal satelit GPS, sehingga didapatkan posisi dari segmen pengguna. Receiver GPS ini juga dilengkapi dengan jam untuk mengukur waktu tempuh sinyal GPS, namun jam receiver ini tidak lebih teliti dari jam satelit. Global Navigation Sattelite System atau yang dikenal dengan GNSS merupakan perkembangan dari teknologi GPS. GNSS merupakan gabungan dari beberapa satelit pengamatan posisi seperti GPS milik Amerika Serikat, GLONASS 19 milik Eropa, dan COMPASS milik China (Panuntun, 2012). Masing-masing satelit tersebut memiliki tiga segmen yang telah diuraikan sebelumnya. Dengan adanya teknologi GNSS ini, pengukuran posisi suatu titik di permukaan bumi menjadi lebih teliti karena jumlah satelit yang terekam oleh receiver lebih banyak. Namun, dalam pengolahan data pengamatan dibutuhkan suatu transformasi datum untuk mengintegrasikan hasil pengamatan dari beberapa satelit. I.8.7. Penentuan Posisi dengan GPS Penentuan posisi dengan GPS pada dasarnya dilakukan dengan prinsip pengikatan ke belakang yaitu dengan mengukur jarak dari beberapa satelit yang diketahui posisinya sehingga posisi pengamat dapat dihitung. Pengamatan dengan teknologi GPS menghasilkan koordinat dalam sistem koordinat geodetik (φ, λ, h), koordinat kartesi tiga dimensi (X,Y,Z) dan parameter waktu. Pengukuran jarak pada saat pengamatan dan pengukuran menggunakan teknologi GPS dibagi menjadi dua jenis (Rizos, 1999) yaitu pengukuran pseudorange dan carrier phase. Pengukuran pseudorange merupakan jarak yang diukur dari waktu perambatan sinyal satelit dari satelit ke receiver. Pengukuran dilakukan oleh receiver dengan membandingkan kode yang diterima dari satelit dan replika kode yang diformulasikan dalam receiver. Sedangkan untuk pengukuran dengan carrier phase merupakan pengukuran yang dilakukan dengan mengukur beda fase sinyal GPS. Proses hitungan dilakukan dengan mengurangkan fase sinyal pembawa dari satelit dengan sinyal yang dibangkitkan dalam receiver. Penetuan posisi dengan teknologi GPS dapat dilakukan dengan dua metode yaitu metode absolut dan metode relatif. Metode absolut atau point positioning merupakan penentuan posisi suatu titik yang dapat ditentukan dengan menggunakan sebuah receiver GPS. Karakteristik dari metode absolut adalah pengukuran yang dilakukan pada satu titik pengamatan, dan pengukuran jarak yang hanya dilakukan dari satelit GNSS ke titik pengamatan berdasarkan jumlah ranging yang terekam oleh antena. Penentuan posisi GPS dengan metode relatif adalah penentuan suatu titik pengamatan yang ditentukan relatif terhadap posisi titik yang lain yang diketahui koordinatnya. Pengukuran dengan metode ini minimal membutuhkan dua receiver 20 GPS atau lebih. Pengukuran antar dua titik pengamatan menghasilkan suatu jarak yang dikenal sebagai jarak basis (baseline). Karakteristik dari metode relatif adalah pengukuran yang dilakukan minimal dua titik pengamatan, dan terdapat data pengamatan yang saling overlaping. Penentuan posisi metode relatif ini telah dikembangkan menjadi beberapa sistem pengukuran, salah satunya adalah metode relatif kinematik. Pengukuran GNSS metode relatif kinematik merupakan metode pengukuran dengan melakukan pengamatan di dua titik atau lebih dalam waktu bersamaan, dengan salah satu titik sebagai base station dan titik yang lain sebagai rover yang bergerak. Base station berfungsi sebagai titik yang memberikan koreksi pengukuran terhadap posisi rover. Pemberian koreksi ini dapat dilakukan dengan post processing maupun secara real time pada waktu pengukuran. Dalam pemberian koreksi secara real time dilakukan menggunakan gelombang radio, bluetooth, dan via internet. I.8.8. International GNSS Service (IGS) IGS merupakan badan multi nasional yang menyediakan data GPS, informasi ephemeris satelit GPS, serta informasi pendukung keperluan geodetik lainnya. IGS ini didirikan oleh International Association of Geodesy (IAG) pada tahun 1993, dan mulai beroperasi pada tahun 1994. Saat ini, IGS memiliki stasiun pengamat yang berjumlah sekitar 200 stasiun yang tersebar di permukaan bumi. Persebaran stasiun IGS ditunjukkan pada Gambar I.13. Gambar I. 13. Persebaran IGS (NASA, 2015) 21 Gambar I.13 menujukkan persebaran IGS di permukaan bumi. Data pengamatan IGS biasanya digunakan sebagai titik ikat dalam pengolahan data pengamatan menggunakan teknologi GPS. Data pengamatan IGS dapat diunduh secara gratis di situs http://sopac.ucsd.edu. I.8.9. Sumatran GPS Data Array (SuGAr) Sumatran GPS Data Array (SuGAr) merupakan stasiun-stasiun GPS yang terdistribusi di Pulau Sumatera. Stasiun-stasiun ini melakukan pengamatan geodetik secara kontinyu selama 24 jam per hari. Stasiun SuGAr dikembangkan oleh Earth Observatory of Singapore (EOS) dan Lembaga Ilmu Penelitian Indonesia (LIPI). Sejak tahun 2002, stasiun SuGAr digunakan untuk memantau aktivitas tektonik di Pulau Sumatera. Stasiun-stasiun SuGAr dapat merekam data pengukuran 100 KBytes sampai 1 MBytes per hari dengan sampling rate yang digunakan adalah 15 detik (McLoughlin, dkk., 2003). Persebaran stasiun SuGAr dapat dilihat pada Gambar 1.13. Gambar I. 14. Persebaran stasiun SuGAr (modifikasi dari EOS, 2012) 22 Gambar I.14 menunjukkan persebaran stasiun SuGAr di Pulau Sumatera. Terdapat 11 stasiun SuGAr di tiga pulau utama Kepulauan Mentawai. Stasiun BSAT, SMGY, PKRT, TLLU, dan TNTI terletak di tiga pulau utama Kepulauan Mentawai yang merupakan wilayah zona subduksi Segmen mentawai atau pada Gambar I.13 dikenal dengan Mentawai Backthrust. Stasiun BSAT dan SMGY terletak di Pulau Pagai, stasiun PKRT terdapat di Pulau Sipora, sedangkan stasiun TLLU dan TNTI terdapat di Pulau Siberut. Kelima stasiun ini terletak di barat Segmen Mentawai. Stasiun TIKU, PARY, PSKI, TRTK, dan MKMK terletak di timur Segmen Mentawai. I.8.10. Pengolahan Data Pengamatan GPS Data pengamatan GPS tidak lepas dari adanya kesalahan. Kesalahan dan bias yang sering terjadi pada pengukuran adalah kesalahan karena efek ionosphere, troposphere, kesalahan jam satelit, kesalahan jam receiver, kesalahan ambiguitas fase, kesalahan cycle slip, dan kesalahan efek multipath. Kesalahan ini dapat dihilangkan atau direduksi dengan teknik pengolahan diferensial. Dalam pengolahan data GPS dikenal tiga teknik differencing, yaitu single differencing, double differencing, dan triple differencing (Abidin, 1995). I.8.10.1. Single difference. Teknik diferensial ini dilakukan dengan menggunakan dua data pengamatan one-way menjadi satu hasil pengamatan single difference. Satu pengamatan one-way dirumuskan sebagai persamaan I.1 dan I.2 (Abidin, 1995) : P = ρ + dρ + 𝑑𝑡𝑟𝑜𝑝 + 𝑑𝑖𝑜𝑛 + (dt – dT) + MP + vP ......................................(I.1) L = ρ + dρ + 𝑑𝑡𝑟𝑜𝑝 + 𝑑𝑖𝑜𝑛 + (dt – dT) + λ.N + MC + vC ...........................(I.2) Dalam hal ini, P : data ukuran pseudorange ρ : jarak geometrik satelit ke pengamat dρ : efek kesalahan orbit satelit 𝑑𝑡𝑟𝑜𝑝 : kesalahan troposphere 𝑑𝑖𝑜𝑛 : kesalahan ionosphere dt : kesalahan jam receiver dT : kesalahan jam satelit 23 MP : efek multipath pseudorange vP : noise pada pseudorange λ : panjang gelombang sinyal GPS N : ambiguitas fase MC : efek multipath fase gelombang GPS vC : noise pada fase gelombang GPS Persamaan I.1 merupakan persamaan one-way yang menggunakan beda waktu, sedangkan persamaan I.2 merupakan persamaan one-way yang menggunakan beda fase. Teknik single difference dapat dilakukan pada pengukuran antar pengamat, antar satelit, dan antar kala. Teknik single difference antar pengamat dilakukan pada kondisi pengukuran dengan dua pengamat, satu satelit, dan satu kala. Hasil single difference antar pengamat ditunjukkan pada persamaan I.3 dan I.4. ∆𝑃 = ∆ρ + ∆dρ + ∆𝑑𝑡𝑟𝑜𝑝 + ∆𝑑𝑖𝑜𝑛 + ∆dt + ∆MP + ∆vP ................(I.3) ∆𝐿 = ∆ρ + ∆dρ + ∆𝑑𝑡𝑟𝑜𝑝 − ∆𝑑𝑖𝑜𝑛 + ∆dt + λ. ∆N + ∆MC + ∆vC ...(I.4) Berdasarkan persamaan I.3 dan I.4, teknik single difference dapat menghilangkan kesalahan jam satelit dan mereduksi kesalahan troposphere dan ionosphere. Teknik single difference antar satelit dilakukan pada pengukuran dengan dua satelit, satu pengamat, dan satu kala. Hasil single difference antar satelit ditunjukkan pada persamaan I.5 dan I.6. ∆𝑃 = ∆ρ + ∆dρ + ∆𝑑𝑡𝑟𝑜𝑝 + ∆𝑑𝑖𝑜𝑛 − ∆dT + ∆MP + ∆vP ...............(I.5) ∆𝐿 = ∆ρ + ∆dρ + ∆𝑑𝑡𝑟𝑜𝑝 − ∆𝑑𝑖𝑜𝑛 − ∆dT + λ. ∆N + ∆MC + ∆vC ....(I.6) Berdasarkan persamaan I.5 dan I.6, teknik single difference dapat menghilangkan kesalahan jam receiver dan mereduksi kesalahan troposphere dan ionosphere. Teknik single difference antar kala dilakukan pada pengukuran dengan dua kala, satu pengamat, dan satu satelit. Hasil single difference antar satelit ditunjukkan pada persamaan I.7 dan I.8. ∆𝑃 = ∆ρ + ∆dρ + ∆𝑑𝑡𝑟𝑜𝑝 + ∆𝑑𝑖𝑜𝑛 + ∆dt − ∆dT + ∆MP + ∆vP .....(I.7) ∆𝐿 = ∆ρ + ∆dρ + ∆𝑑𝑡𝑟𝑜𝑝 − ∆𝑑𝑖𝑜𝑛 + ∆dt − ∆dT + ∆MC + ∆vC ......(I.8) Berdasarkan persamaan I.7 dan I.8, teknik single difference dapat menghilangkan kesalahan ambiguitas fase pada pengolahan data menggunakan beda fase. 24 I.8.10.2. Double difference. Teknik differensial ini dilakukan dengan menggunakan empat data pengamatan one-way atau dua data pengamatan single difference menjadi satu hasil pengamatan double difference. Teknik ini dapat dilakukan pada pengukuran antara pengamat-satelit, pengamat-kala, dan satelit-kala. Pengamatan double difference antara pengamat-satelit dilakukan pada dua pengamat, dua satelit, dan satu kala. Hasil teknik double difference ditunjukkan pada persamaan I.9 dan I.10. ∆∇𝑃 = ∆∇ρ + ∆∇dρ + ∆∇𝑑𝑡𝑟𝑜𝑝 + ∆∇𝑑𝑖𝑜𝑛 + ∆∇MP + ∆∇vP ....................(I.9) ∆∇𝐿 = ∆∇ρ + ∆∇dρ + ∆∇𝑑𝑡𝑟𝑜𝑝 − ∆∇𝑑𝑖𝑜𝑛 + λ. ∆∇N + ∆∇MC + ∆∇vC ...(I.10) Berdasarkan persamaan I.9 dan I.10, teknik double difference dapat menghilangkan kesalahan jam satelit dan receiver, serta meminimalkan kesalahan troposphere dan ionosphere. Pengamatan double difference antara pengamat dan kala dilakukan pada dua pengamat, satu satelit, dan dua kala. Hasil teknik double difference ditunjukkan pada persamaan I.11 dan I.12. ∆∇𝑃 = ∆∇ρ + ∆∇dρ + ∆∇𝑑𝑡𝑟𝑜𝑝 + ∆∇𝑑𝑖𝑜𝑛 + ∆∇dt + ∆∇MP + ∆∇vP .....(I.11) ∆∇𝐿 = ∆∇ρ + ∆∇dρ + ∆∇𝑑𝑡𝑟𝑜𝑝 − ∆∇𝑑𝑖𝑜𝑛 + ∆∇dt + ∆∇MC + ∆∇vC .....(I.12) Berdasarkan persamaan I.11 dan I.12, teknik double difference dapat menghilangkan kesalahan jam satelit dan kesalahan ambiguitas fase, serta meminimalkan kesalahan troposphere dan ionosphere. Pengamatan double difference antara satelit dan kala dilakukan pada dua satelit, satu pengamat, dan dua kala. Hasil teknik double difference ditunjukkan pada persamaan I.13 dan I.14. ∆∇𝑃 = ∆∇ρ + ∆∇dρ + ∆∇𝑑𝑡𝑟𝑜𝑝 + ∆∇𝑑𝑖𝑜𝑛 + ∆∇dT + ∆∇MP + ∆∇vP ....(I.13) ∆∇𝐿 = ∆∇ρ + ∆∇dρ + ∆∇𝑑𝑡𝑟𝑜𝑝 − ∆∇𝑑𝑖𝑜𝑛 + ∆∇dT + ∆∇MC + ∆∇vC .....(I.14) Berdasarkan persamaan I.13 dan I.14, teknik double difference dapat menghilangkan kesalahan jam receiver dan kesalahan ambiguitas fase, serta meminimalkan kesalahan troposphere dan ionosphere. I.8.10.3. Triple difference. Teknik differensial ini dilakukan dengan menggunakan delapan data pengamatan one-way atau dua data pengamatan double difference menjadi satu hasil pengamatan triple difference. Teknik ini dapat 25 dilakukan pada pengukuran dengan dua titik pengamat, dua satelit, dan dua kala. Hasil teknik triple difference ditunjukkan pada persamaan I.15 dan I.16. ∆∇δ𝑃 = ∆∇δρ + ∆∇δdρ + ∆∇δ𝑑𝑡𝑟𝑜𝑝 + ∆∇δ𝑑𝑖𝑜𝑛 + ∆∇δMP + ∆∇δvP ...(I.15) ∆∇δ𝐿 = ∆∇δρ + ∆∇δdρ + ∆∇δ𝑑𝑡𝑟𝑜𝑝 − ∆∇δ𝑑𝑖𝑜𝑛 + ∆∇δMC + ∆∇δvC ....(I.16) Berdasarkan persamaan I.15 dan I.16, teknik double difference dapat menghilangkan kesalahan jam satelit dan receiver, menghilangkan kesalahan ambiguitas fase, serta meminimalkan kesalahan troposphere dan ionosphere. I.8.11. Pengolahan Data Pengamatan Menggunakan GAMIT/GLOBK Perangkat lunak GAMIT/GLOBK terdiri atas dua perangkat yaitu perangkat lunak GAMIT dan perangkat lunak GLOBK. GAMIT merupakan perangkat lunak ilmiah fully automatic processing untuk menganalisis data GPS yang komprehensif dan dikembangkan oleh Massachusetts Institute of Technology. Perangkat lunak ini dapat digunakan untuk melakukan perhitungan posisi tiga dimensi dan satelit orbit. International GNSS Service (IGS) berdiri pada tahun 1992. Perkembangan IGS memungkinkan adanya perkembangan pengolahan data GPS secara otomatis. Dalam proses perhitungan posisi tiga dimensi, GAMIT melibatkan data pengamatan stasiunstasiun kontinyu di seluruh dunia termasuk IGS. GLOBK merupakan suatu paket program yang dapat mengkombinasikan data survei teristris dan ekstrateristris. File input pada pengolahan GLOBK adalah matriks kovarian dari data koordinat stasiun, parameter rotasi bumi, parameter orbit, dan koordinat hasil pengamatan lapangan (Herring,dkk., 2006). File yang digunakan untuk pengolahan GLOBK adalah h-file yang merupakan hasil pengolahan GAMIT. GLOBK dapat mengkombinasikan hasil pengolahan data pengamatan harian untuk menghasilkan koordinat stasiun rata-rata dari pengamatan multidays, mengkombinasikan hasil pengamatan selama bertahun-tahun untuk menghasilkan koordinat stasiun, dan melakukan estimasi koordinat stasiun dari pengamatan individual yang digunakan untuk menghasilkan time series koordinat. I.8.11.1. Perataan jaring pada GAMIT. Perataan jaring menggunakan perangkat lunak GAMIT menggunakan teknik double difference. Perhitungan dilakukan dengan menggunakan prinsip hitung kuadrat terkecil parameter berbobot (Anonim, 2000). Sebagai contoh, dilakukan hitungan dengan menggunakan data pengukuran dua titik 26 pengamatan (A) dan (B) serta dua satelit (i) dan (j). Jarak yang terbentuk dari dua titik pengamatan tersebut ditunjukkan pada persamaan I.17 dan I.18. Ai X t X Y t Y Z t Z ................................ (I.17) Bj X ............................... (I.18) 2 i 2 i A j 2 i A A t X B 2 Y j t YB 2 Z j t Z B 2 Dengan koordinat pendekatan titik pengamatan (A) adalah X 0 A , YA0 , Z A0 maka koordinat stasiun pengamatan (A) ditentukan dengan persamaan I.19. X A X A0 dX A YA YA0 dYA Z A Z A0 dZ A ........................................................................................ (I.19) Selanjutnya dilakukan proses linearisasi persamaan I.17 dan persamaan I.18, hasilnya seperti persamaan I.20. Ai t Ai 0 cx i t .dX A cy i t .dYA cz i t .dZ A Bj t Bj 0 cx j t .dX B cy j t .dYB cz j t .dZ B .............................. (I.20) Dalam hal ini, cx : turunan persamaan terhadap dX cy : turunan persamaan terhadap dY cz : turunan persamaan terhadap dZ Dengan melakukan subtitusi persamaan I.20 ke persamaan double difference antara pengamat dan satelit, didapatkan solusi persamaan double difference seperti yang ditunjukkan persamaan I.21. LAB t AB t cxij t .dX A cy ij t .dYA cz ij t .dZ A .N AB vCAB t .....(I.21) ij 0 ij ij ij Persamaan double difference ini menggunakan data beda fase. Selanjutnya, dilakukan hitung kuadrat terkecil parameter berbobot untuk mendapatkan koordinat pengamat (A). 𝑉 = 𝐴𝑋 + 𝐿 ................................................................................................ (I.22) P=[ 𝑃1 0 0 ] ................................................................................................ (I.23) 𝑃2 A = [ cx ij t L = [ LABij t cy ij t cz ij t − AB ij 0 𝜆] ...................................................... (I.24) t ] ........................................................... (I.25) 27 𝑑𝑋𝐴 𝑑𝑌 X = [ 𝐴 ] ................................................................................................. (I.26) 𝑑𝑍𝐴 ∆∇N𝐴 Dalam hal ini, V : matriks residu P : matriks bobot A : matriks desain 𝑖𝑗 ∆𝛻𝜌𝐿𝐴𝐵 : matriks ukuran X : matriks parameter 𝑖𝑗 ∆∇𝜌𝐴𝐵 : jarak satelit-pengamat pendekatan Hasil pengolahan data pengamatan menggunakan GAMIT berupa solusi bias fixed dan solusi bias free. Solusi ini didapatkan dari perhitungan double difference data beda fase yang dilakukan dua kali, yaitu dengan ambiguity-fixed dan ambiguityfloat. Ambiguitas fase disebabkan oleh adanya ambiguitas jumlah gelombang penuh dan tidak penuh yang terekam oleh receiver GPS. I.8.11.2. Evaluasi hasil pengolahan GAMIT. Untuk mengevaluasi hasil pengolahan GAMIT dapat dilakukan dengan menganalisis nilai fract dan postfit nrms sebagai output dari pengolahan GAMIT. Nilai postfit nrms dihitung dengan persamaan I.27 dan I.28 (Herring, dkk., 2006). √𝑥 2 Postfit nrms = √(𝑛−𝑢) .............................................................................. (I.27) ̂2 𝜎 x2 = 𝜎2 ................................................................................................... (I.28) Dalam hal ini, 𝜎̂ 2 : varian aposteriori untuk unit bobot 𝜎2 : varian apriori untuk unit bobot n : jumlah ukuran u : ukuran minimum 28 Postfit nrms merupakan perbandingan nilai varian aposteriori dan varian apriori untuk unit bobot. Standar kualitas postfit nrms adalah ± 0,25. Apabila nilai postfit nrms lebih besar dari 0,25 maka mengindikasikan masih terdapat efek cycle slip yang belum dihilangkan berkaitan dengan parameter bias ekstra atau terdapat kesalahan dalam pemodelan (Herring, dkk., 2006). Nilai fract merupakan perbandingan antara nilai adjust dan nilai formal. Nilai fract digunakan untuk menganalisis apakah terdapat nilai adjust yang janggal dan perlu tidaknya iterasi untuk mendapatkan nilai adjust yang bebas dari efek nonlinear. Nilai adjust menunjukkan besarnya perataan yang diberikan pada parameter hitungan. Sedangkan nilai formal menunjukkan ketidakpastian pada pemberian bobot untuk perhitungan kuadrat terkecil. Kontrol kualitas nilai fract adalah nilai fract tidak boleh lebih dari 10 (Herring, dkk., 2006). I.8.11.3. Perataan koordinat pada GLOBK. Proses hitungan pada GLOBK merupakan proses Kalman Filter untuk mengkombinasikan solusi-solusi hasil pengolahan data pengamatan. Ada tiga program utama dalam GLOBK, yaitu GLOBK, GLRED, dan GLORG. GLOBK merupakan proses Kalman Filter untuk mengkombinasikan data pengolahan harian GAMIT dan untuk mendapatkan estimasi posisi rata-rata titik pengamatan. GLORG melakukan pengikatan titik-titik pengamatan terhadap titik-titik referensi yang diberikan. Sedangkan GLRED melakukan perhitungan posisi pada masing-masing hari, sehingga ketelitian posisi yang diperoleh dapat dibandingkan per waktu tertentu. I.8.11.4. Evaluasi hasil pengolahan GLOBK. Untuk mengevaluasi hasil pengolahan GLOBK dapat dilihat pada log file dan plot time series. Log file menunjukkan konsistensi data harian secara internal dan plot time series digunakan untuk melihat data outliers. Log file berisi nilai stastistik termasuk simpangan baku yang digunakan untuk analisis terhadap nilai koordinat hasil olahan. Sedangkan plot time series menampilkan nilai weighted root mean square (wrms) dan normal root mean square (nrms). Nilai wrms yang baik dan tidak menunjukkan adanya data outliers adalah di bawah 10 mm (Herring, dkk., 2006). Selain itu, evaluasi juga bisa dilakukan dengan melihat nilai stastistik chi-squared increament per degree of freedom x2/f dimana nilai x2/f tidak boleh lebih dari 10 dan limit maksimal adalah 30 (Lestari, 2006). 29 I.8.12. Sistem Koordinat Toposentrik Pengolahan data pengamatan GPS yang diolah menggunakan GAMIT/GLOBK menghasilkan koordinat stasiun pengamatan dalam sistem koordinat kartesi 3D dan koordinat toposentrik. Hubungan sistem koordinat kartesi 3D dan toposentrik ditunjukkan Gambar I.15. Z(+) U (+) N(+) Horison Pengamat A hA E (+) A X(+) O λA NA λA Y(+) Gambar I.15. Hubungan sistem koordinat kartesi 3D dan sistem koordinat toposentrik (modifikasi dari Fahrurrazi, 2011) Gambar I.15. menunjukkan hubungan antara posisi dalam sistem koordinat kartesi 3D dan sistem koordinat toposentrik. Dalam penelitian ini posisi dalam koordinat kartesi 3D memiliki komponen (X, Y, Z) dan posisi dalam koordinat toposentrik memiliki komponen East (E), North (N), dan Up (U). Sistem koordinat kartesi 3D memiliki origin salib sumbu yang berimpit dengan pusat massa bumi (Fahrurrazi, 2011). Sedangkan sistem koordinat toposentrik memiliki origin salib sumbu di titik pengamatan GPS. Sumbu E (+) menunjukkan arah timur. Sumbu N (+) menunjukkan arah utara. Sedangkan sumbu U merupakan komponen vertikal. Sumbu U terbentuk dari garis perpanjangan jari-jari kelengkungan normal titik pengamat. Pada Gambar I.15 jarijari kelengkungan normal titik pengamat (A) ditunjukkan sebagai NA. 30 I.8.13. Datum Bumi yang memiliki dinamika tinggi, dalam keilmuan geodesi dapat dimodelkan menjadi dua macam, yaitu model bumi fisis dan model bumi matematis. Model bumi matematis digunakan untuk mempermudah proses hitungan geodetik misalnya untuk penentuan posisi. Model bumi matematis terdiri atas model bumi elipsoid dan model bumi bola. Model bumi elipsoid ini menggunakan datum untuk mendefinisikan bentuknya. Datum merupakan parameter yang digunakan sebagai acuan untuk mendefinisikan geometri elipsoid bumi (Fahrurrazi, 2011). Parameter datum terdiri atas dua parameter yang mendefinisikan elipsoid yaitu sumbu panjang dan penggepengan, tiga parameter translasi yang mendefinisikan origin elipsoid, dan tiga parameter rotasi yang mendefinisikan arah sumbu-sumbu (X,Y, dan Z) elipsoid. Dalam pengukuran dan penentuan posisi menggunakan teknologi GPS, didapatkan posisi pengamat di atas suatu datum referensi, yaitu WGS’84. Posisi di atas datum WGS’84 ini dapat digambarkan dalam sistem koordinat kartesi 3D maupun sistem koordinat geodetik. Gambaran datum WGS’84 ditunjukkan pada Gambar I.16. Z Meridian Pengamat Meridian Greenwhich P h ZP XP Ekuator X a O φ YP λ Y b Gambar I. 16. Koordinat kartesi 3D dan geodetik (modifikasi dari Fahrurrazi, 2011) 31 Gambar I.16 menunjukkan koordinat kartesi 3D yang dinyatakan dalam (X, Y, Z) dan koordinat geodetik yang dinyatakan dalam (φ, λ, h). Kedua sistem ini menggunakan elipsoid WGS’84, dengan setengah sumbu panjang sebesar 6378137 m dan penggepengan (1/f) sebesar 298, 257223563 (Jekeli, 2006). I.8.14. Deformasi Deformasi merupakan perubahan bentuk, posisi, dan dimensi dari suatu benda (Kuang, 1996). Deformasi juga diartikan sebagai perubahan kedudukan atau pergerakan suatu titik pada suatu benda secara absolut maupun relatif, dan lebih disebabkan oleh adanya pergerakan lempeng (Widjajanti, 1997). Pergerakan secara absolut adalah gerakan pada suatu sistem referensi tertentu yang dilihat dari titik itu sendiri, sedangkan pergerakan secara relatif adalah gerakan pada suatu sistem referensi tertentu yang dilihat dari titik lain. Efek-efek dari penyebab deformasi atau pergeseran pada suatu materi menciptakan reaksi yang sebanding dengan sifat geometrik dan jenis material dari materi yang terdeformasi tersebut. Beban atau gaya berat materi merupakan gaya penyebab deformasi. Bekerjanya gaya berat pada suatu materi yang disertai pengaruh gaya berat dari materi di sekitarnya dalam suatu selang waktu mempengaruhi bentuk geometri materi tersebut. Reaksi yang terjadi mempengaruhi posisi, bentuk, dan dimensi materi yang terdeformasi. Analisis deformasi dari aspek geometrik, perlu menerapkan kerangka dasar. Analisis deformasi bertujuan untuk menentukan kuantifikasi pergeseran dan parameter-parameter deformasi, yang mempunyai karakteristik dalam ruang dan waktu. Penyelidikan deformasi pada suatu objek pengamatan biasanya dilakukan berulang pada kala yang berbeda. Berdasarkan hasil pengukuran berulang tersebut, didapatkan perbedaan koordinat titik-titik pantau sehingga besar dan parameterparameter deformasi dapat ditentukan. I.8.15. Jenis-jenis Deformasi Deformasi pada suatu materi dikelompokan menjadi tiga jenis, yaitu translasi, rotasi, dan regangan. Translasi merupakan perpindahan posisi materi sesuai dengan sumbu koordinat acuan tanpa mengalami perubahan bentuk (Widjajanti, 1997). Rotasi merupakan perubahan posisi suatu materi yang membenuk perubahan sudut terhadap koordinat acuan tanpa mengalami perubahan bentuk. Sedangkan regangan 32 merupakan deformasi yang terjadi per unit panjang pada suatu materi (Widjajanti, 1997). Ketiga jenis deformasi ini merupakan parameter-parameter deformasi. Parameter deformasi regangan memiliki dua jenis, yaitu regangan normal dan regangan geser. Regangan normal adalah regangan yang terjadi searah dengan arah deformasi, sedangkan regangan geser adalah regangan yang terjadi pada suatu sudut searah dengan arah deformasi (Widjajanti, 1997). Dalam koordinat tiga dimensi, parameter-parameter deformasi dituliskan sebagai berikut (Denli dan Deniz, 2003) : u o , vo , wo : translasi X, translasi Y, translasi Z yz , xz , xy : rotasi X, rotasi Y, rotasi Z e xx , e yy , e zz : regangan normal X, regangan normal Y, regangan normal Z xy , xz , yzy : regangan geser X, regangan geser Y, regangan geser Z Proses analisis parameter-parameter deformasi dalam suatu materi dapat dilakukan dengan metode geometrik dan interpretasi fisik. Metode geometrik dilakukan dengan menggunakan data pengamatan geodetik sehingga didapatkan deformasi secara kuantitatif yang meliputi besar dan pola pergeseran, besar dan pola parameter-parameter deformasi serta model deformasinya. Sedangkan interpretasi fisik memberikan informasi mengenai status fisik benda yang mengalami deformasi. I.8.16. Analisis Deformasi Aspek Geometrik Analisis deformasi aspek geometrik dapat dilakukan dengan menganalisis pergeseran posisi titik pantau. Analisis pergeseran terdiri atas dua tahap pengujian, yaitu uji kesebangunan jaring dan uji pergeseran titik. I.8.16.1. Uji kesebangunan jaring. Tujuan dari uji ini adalah untuk memeriksa kemungkinan adanya perubahan bentuk jaring yang digunakan pada masing-masing periode pengamatan. Pengujian dilakukan terhadap jaring pemantauan deformasi secara global (Widjajanti, 1997). Tahap pengujiannya adalah sebagai berikut : 1. Membentuk model hitungan (persamaan syarat) berdasarkan pasangan titik pantau atau parameter deformasi dari kedua periode. Persamaan syarat ditunjukkan pada persamaan I.29. Ud Vd + d = 0 ....................................................................................... (I.29) 33 Ud : matriks koefisien koreksi pengamatan d : vektor pergeseran titik pantau Vd : vektor koreksi pergeseran 2. Menghitung nilai korelat pergeseran K. Nilai korelat pergesaran dihitung dengan persamaan I.30 s.d I.31. K = ( Ud Qd UdT )-1 d ........................................................................... (I.30) (𝑗) Qd = [𝑄 0 0 ] ............................................................................... (I.31) 𝑄 (𝑘) 𝑄 (𝑗) : matriks kofaktor parameter pada periode pertama 𝑄 (𝑘) : matriks kofaktor parameter pada periode kedua 3. Menghitung nilai koreksi pergeseran titik obyek Vd dan Vd . Perhitungan nilai koreksi pergeseran dilakukan sesuai dengan persamaan I.32 dan I.33. Vd = - Qd UdT K ................................................................................. (I.32) Vd = Qd-1 Vd ....................................................................................... (I.33) 4. Menghitung varian nilai pergeseran dengan persamaan I.34 dan I.35. Varian apriori pergeseran : 0 d 2 ˆ 0 2( j ) ˆ 0 2( k ) Varian aposteori pergeseran : ˆ 0 d 2 ................................ (I.34) 2 T Vd Qd-1Vd .................................... (I.35) r 5. Menyusun hipotesis. Ho : bentuk jaringan tidak mengalami perubahan ( σ̂0d 2 = σ od 2 ) 2 Ha : bentuk jaringan mengalami perubahan ( σ̂ od > σ od 2 ) 6. Menetapkan taraf uji ( α 0 ). 7. Menentukan nilai batas F1- 0 ,,r dari tabel fungsi Fisher dengan argumen α0 dan r (jumlah persamaan syarat). 8. Menguji hipotesis nol (Ho) dengan menggunakan persamaan I.36. σ̂ 02d Hipotesis nol ditolak jika : 2 > F1-α0 ,∞,r ............................................. (I.36) σ0d 34 Penerimaan Ho bermakna bahwa pergeseran tidak terjadi pada jaring pemantauan. Begitu pula sebaliknya, penolakan Ho menunjukkan adanya pergeseran pada jaring pemantauan. Jika penolakan ini terjadi maka perlu dilakukan uji pergeseran titik pantau untuk mengidentifikasi titik-titik pantau yang telah mengalami pergeseran. I.8.16.2. Uji pergeseran titik. Uji ini dilakukan untuk mengetahui titik-titik pantau yang mengalami pergeseran. Tahap ini dilakukan jika hasil uji kesebangunan jaringan ditolak. Pada intinya, dalam mendeteksi pergeseran pada tiap titik pantau, uji ini mirip seperti proses data snooping yaitu dilakukan terhadap masing-masing titik pantau. Tahap pengujiannya adalah sebagai berikut (Widjajanti, 1997) : 1. Menyusun hipotesis. Ho : titik ke-i tidak mengalami pergeseran Ha : titik ke-i mengalami pergeseran 2. Menetapkan taraf uji ( α 0 ). 3. Menentukan nilai batas F1- 0 ,∞,1 dari tabel fungsi Fisher dengan argumen α0 . 4. Menghitung nilai Wdi untuk setiap titik pantau sesuai dengan persamaan I.37 dan I.38. -1 Wdi Qdi Vdi od N di ...................................................................................... (I.37) Nd = UdT ( Ud Qd UdT )-1 Ud ................................................................... (I.38) 5. Menguji hipotesis nol (Ho) dengan menggunakan persamaan I.39. Hipotesis nol diterima jika : Wdi ≤ F 1 21- 0 ,∞,1 ...................................... (I.39) Apabila Ho diterima maka artinya titik ke-i tidak mengalami pergeseran, sebaliknya jika Ho ditolak maka titik ke-i itu mengalami pergeseran. I.8.17. Vektor Pergeseran Titik Pantau Setelah didapatkan nilai koordinat dan simpangan baku 10 stasiun SuGAr dari hasil pengolahan data pengamatan menggunakan GAMIT/GLOBK untuk kedua kala masing-masing fase gempa tektonik, selanjutnya dilakukan penghitungan vektor pergeseran horisontal titik pantau yang terdiri atas besar pergeseran dan arah pergeseran, serta pergerakan vertikal titik pantau. Besar dan arah pergeseran 35 horisontal stasiun SuGAr dapat dihitung dengan persamaan I.40 dan persamaan I.41, sedangkan pergerakan vertikal dapat dihitung dengan persamaan I.42. 𝑑𝐻 = √(𝑋 (𝑗) − 𝑋 (𝑖) )2 + (𝑌 (𝑗) − 𝑌 (𝑖) )2 ....................................................(I.40) 𝑑𝑉 = (𝑍 (𝑗) − 𝑍 (𝑖) ) .......................................................................................(I.41) 𝛼 = 𝑎𝑟𝑐 𝑡𝑎𝑛 𝑥 (𝑗) −𝑥 (𝑖) 𝑦 (𝑗) −𝑦 (𝑖) ................................................................................(I.42) Dalam hal ini, i : kala satu fase gempa tektonik j : kala dua fase gempa tektonik dH : resultan pergeseran horisontal dV : pergerakan vertikal α : arah pergeseran horisontal I.8.18. Perhitungan Vektor Kecepatan Pergeseran Titik Pantau Besar kecepatan pergeseran stasiun GPS dihitung menggunakan persamaan I.43 : 𝑋𝑡 = 𝑋𝑡0 + (𝑡 − 𝑡0 ) 𝑉 .............................................................................(1.43) Dalam hal ini, Xt : koordinat stasiun pengamatan pada kala t 𝑋𝑡0 : koordinat stasiun pengamatan pada kala t0 V : kecepatan pergeseran Resultan vektor pergesersan kemudian dihitung dengan menggunakan persamaan I.44 : 𝑉𝑅 = √𝑉𝑛2 + 𝑉𝑒2 ........................................................................................(1.44) Dalam hal ini, VR : resultan kecepatan pergeseran Vn : kecepatan pergeseran pada komponen northing Ve : kecepatan pergeseran pada komponen easting Arah vektor pergeseran dihitung dengan menggunakan persamaan I.45 : 𝛼 = tan 𝑉𝑒 𝑉𝑛 .................................................................................................(1.45) Dalam hal ini, α : arah vektor pergeseran horisontal 36 I.8.19. Uji Signifikansi Beda Dua Parameter Uji signifikansi beda dua parameter ini dilakukan untuk mengetahui signifikansi perbedaan dua parameter dengan menggunakan distribusi student pada tingkat kepercayaan dan derajat kebebasan tertentu. Pada penelitian ini, uji signifikansi beda dua parameter digunakan untuk mengetahui signifikansi perbedaan koordinat 10 stasiun SuGAr pada fase interseismic dan fase coseismic. Kriteria pengujian yang digunakan sesuai dengan persamaan I.46. dan persamaan I.47. (Widjajanti, 2010). t= |𝑥1 −𝑥2 | ............................................................................................ (I.46) 2 +𝜎 2 √𝜎𝑥1 𝑥2 t ≤ t (α/2,df) .................................................................................................... (I.47) Dalam hal ini, t : nilai t-hitungan x1 : koordinat stasiun SuGAr pada fase interseismic x2 : koordinat stasiun SuGAr pada fase coseismic 2 𝜎𝑥1 : varian koordinat stasiun SuGAr pada fase interseismic 2 𝜎𝑥2 : varian koordinat stasiun SuGAr pada fase coseismic Penolakan hipotesis nol (Ho) apabila kriteria tidak sesuai dengan persamaan I.47. Penolakan Ho ini mengindikasikan bahwa dua parameter berbeda secara signifikan. Sedangkan penerimaan Ho mengindikasikan bahwa dua parameter tidak berbeda signifikan secara statistik. I.8.20. Nilai nrms dan wrms Nilai nrms (Normal Root Mean Square) dan wrms (Weighted Root Mean Square) dapat digunakan dalam evaluasi model hitungan secara statistik. Perbedaan nrms dan wrms adalah pemberian nilai bobot pada hitungan wrms. Perhitungan nrms dan wrms sesuai dengan persamaan I.49 dan I.50 (Chai dan Draxler, 2014). rms = √∑𝑛𝑖=1 nrms = 𝑥 ( 𝑥𝑖 − 𝑥̅ )2 𝑛 𝑟𝑚𝑠 𝑚𝑎𝑥 − 𝑥𝑚𝑖𝑛 ................................................................................. I.48 ....................................................................................... I.49 37 wrms = √∑𝑛𝑖=1 𝜔𝑖 ( 𝑥𝑖 − 𝑥̅ )2 (𝜎𝑥𝑖 )2 .................................................................................... I.50 Dalam hal ini, 𝑥𝑖 : data ke-i 𝜔𝑖 : bobot pada data ke-i n : jumlah data 𝜎𝑥𝑖 : simpangan baku data ke-i Berdasarkan persamaan I.50, nrms merupakan nilai rms (root mean square) dibagi dengan selisih antara nilai maksimal dan minimal. Nilai nrms dan wrms dapat memberikan tingkat kesensitifan yang berbeda untuk mendeteksi error pada proses evaluasi model hitungan. I.9. Hipotesis Berdasarkan penelitian yang dilakukan oleh Prawirodirdjo (2000) dan Permana (2012) yang menyebutkan bahwa Pulau Sumatera merupakan wilayah pertemuan Lempeng Indo-Australia dan Eurasia dengan kecepatan 5 s.d 6 cm/tahun ke arah utara-timurlaut, serta penelitian Hongbo dkk (2013) yang menunjukkan bahwa fase coseismic gempabumi Lushan di China mengakibatkan deformasi kurang dari 10 mm, maka gempa tektonik Mentawai pada tanggal 10 Juli 2013 mempengaruhi besar dan arah deformasi Segmen Mentawai mencapai fraksi sentimeter dengan pergerakan ke arah utara-timurlaut pada fase interseismic dan post-seismic. Sedangkan deformasi pada fase coseismic kurang dari 10 mm. 38