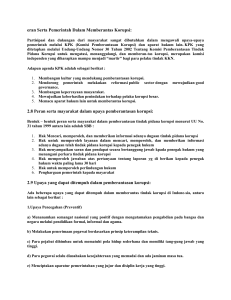
Klasifikasi Pengendali Industri Sebagian besar pengontrol industri mungkin diklasifikasikan menurut aksi kontrolnya sebagai: 1. Pengontrol dua posisi atau on-off 2. Pengontrol proporsional 3. Pengendali terintegrasi 4. Pengontrol proporsional-plus-integral 5. Kontroler proporsional-plus-derivatif 6. Kontroler proporsional-plus-integral-plus-derivatif Sebagian besar pengontrol industri menggunakan listrik atau fluida bertekanan seperti minyak atau udara sebagai sumber daya. Akibatnya, pengendali juga dapat diklasifikasikan menurut jenisnya daya yang digunakan dalam operasi, seperti pengontrol pneumatik, pengontrol hidrolik, atau pengontrol elektronik. Jenis pengontrol yang digunakan harus ditentukan berdasarkan sifat pabrik dan kondisi operasi, termasuk pertimbangan seperti keselamatan, biaya, ketersediaan, keandalan, akurasi, berat, dan ukuran. Aksi Kontrol Dua-Posisi atau Nyala-Mati. Dalam sistem kontrol dua posisi, the elemen penggerak hanya memiliki dua posisi tetap, yang, dalam banyak kasus, cukup pada dan off. Dua posisi atau kontrol on-off relatif sederhana dan murah dan, untuk alasan ini, sangat banyak digunakan dalam sistem kontrol industri dan domestik. Biarkan sinyal output dari pengontrol menjadi u(t) dan sinyal kesalahan yang digerakkan menjadi e(t). Dalam kontrol dua posisi, sinyal u(t) tetap pada nilai maksimum atau minimum, tergantung pada apakah sinyal kesalahan aktuasi positif atau negatif, sehingga di mana U1 dan U2 adalah konstanta. Nilai minimum U2 biasanya nol atau –U1. Pengontrol dua posisi pada umumnya adalah perangkat listrik, dan dioperasikan solenoid listrik katup banyak digunakan dalam pengendali tersebut. Kontroler proporsional pneumatik dengan sangat gain tinggi bertindak sebagai pengontrol dua posisi dan kadang-kadang disebut pneumatik dua arah pengendali. Gambar 2–7 (a) dan (b) menunjukkan diagram blok untuk pengontrol dua posisi atau on-off. Rentang melalui mana sinyal kesalahan penggerak harus bergerak sebelum switching terjadi. Kisaran di mana sinyal kesalahan penggerak harus bergerak sebelum switching terjadi disebut kesenjangan diferensial. Kesenjangan diferensial ditunjukkan pada Gambar 2-7 (b). Jarak diferensial seperti itu menyebabkan output pengontrol u(t) untuk mempertahankan nilai sekarang sampai digerakkan sinyal kesalahan telah bergerak sedikit melampaui nilai nol. Dalam beberapa kasus, jarak diferensial adalah hasil dari gesekan yang tidak disengaja dan gerakan yang hilang; Namun, sering kali itu sengaja disediakan untuk mencegah operasi mekanisme on-off yang terlalu sering. Figure 2–7 (a) Block diagram of an on–off controller; (b) block diagram of an on–off controller with differential gap Pertimbangkan sistem kontrol level cairan yang ditunjukkan pada Gambar 2-8 (a), di mana elektromagnetik katup yang ditunjukkan pada Gambar 2-8 (b) digunakan untuk mengendalikan laju aliran masuk. Katup ini juga terbuka atau tertutup. Dengan kontrol dua posisi ini, laju aliran air adalah konstanta positif atau nol. Seperti yang ditunjukkan pada Gambar 2-9, sinyal output terus bergerak di antara diperlukan dua batasan untuk menyebabkan elemen penggerak bergerak dari satu posisi tetap ke lain. Perhatikan bahwa kurva output mengikuti salah satu dari dua kurva eksponensial, satu yang sesuai ke kurva pengisian dan yang lainnya ke kurva pengosongan. Osilasi output tersebut antara dua batas adalah karakteristik respons khas sistem di bawah kontrol dua posisi. Figure 2–8 (a) Liquid-level control system; (b) electromagnetic valve. Figure 2–9 Level h(t)-versus-t curve for the system shown in Figure 2–8(a). Dari Gambar 2–9, terlihat bahwa amplitudo dari osilasi keluaran dapat dikurangi dengan mengurangi kesenjangan diferensial. Penurunan diferensial Namun, gap meningkatkan jumlah pensakelaran on-off per menit dan berkurang sesuai umur manfaat komponen. Besarnya celah diferensial harus ditentukan pertimbangan seperti keakuratan yang disyaratkan dan umur komponen. dari