BAB I
KOMPONEN-KOMPONEN UTAMA
SISTEM TENAGA LISTRIK
Tujuan Umum:
Mahasiswa
dapat
memahami
komponenkomponen utama suatu sistem tenaga listrik
Tujuan Khusus:
Mahasiswa dapat memahami pengertian dari
sistem
pembangkit
tenaga listrik,
sistem
transmisi dan sistem distribusi
Mahasiswa mengenal sumber-sumber energi
listrik
Mahasiswa mampu membuat perancangan dan
perencanaan sistem tenaga listrik
A. Pendahuluan
Komponen-komponen utama suatu sistem
tenaga listrik terdiri dari Pusat-pusat Pembangkit
1
atau Sistem Pembangkitan, Saluran Transmisi
atau Sistem Transmisi dan Sistem Distribusi.
B. Sistem Pembangkitan Tenaga Listrik
Sistem Pembangkitan Tenaga Listrik berfungsi
membangkitkan energi listrik melalui berbagai
macam
pembangkit
tenaga
listrik.
Pada
pembangkit tenaga listrik ini sumber-sumber
energi alam dirobah oleh penggerak mula menjadi
energi mekanis yang berupa kecepatan atau
putaran dan selanjutnya energi mekanis dirobah
menjadi energi listrik oleh generator.
C. Sistem Transmisi
Sistem transmisi berfugsi menyalurkan tenaga
listrik dari pusat pembangkit ke pusat beban
melalui saluran transmisi, karena adakalanya
pembangkit tenaga listrik dibagun ditempat yang
jauh dari pusat-pusat beban.
D. Sistem Distribusi
Sistem Distribusi berfungsi mendistribusikan
tenaga listrik ke konsumen yang berupa pabrik,
industri, perumahan dan sebagainya. Transmisi
tenaga dengan tengangan tinggi maupun tegangan
ekstra tinggi pada saluran transmisi dirubah pada
gardu induk menjadi tegangan menengah atau
tegangan distribusi primer, yang selanjutnya
tegangannya diturunkan lagi menjadi tegangan
untuk konsumen.
2
Persoalan-persoalan yang muncul pada sistem
tenaga listrik meliputi antara lain: aliran daya,
operasi ekonomik (economic load dispatch),
gangguan hubungan singkat, kestabilan sistem,
pengaturan daya aktif dan frekuensi, pelepasan
beban, pengetanahan netral sistem, pengaman
sistem arus lebih, tegangan lebih, keandalan dan
interkoneksi sistem tenaga.
E. Perancangan dan Perencanaan Sistem Tenaga
Listrik
Perancangan adalah proses atau cara membuat
rancangan, dalam hal ini kalau diterapkan pada
sistem tenaga listrik akan melibatkan masalah
bagaimana
merancang
pembangkit,
saluran
transmisi dan distribusi tenaga listrik yang
disesuaikan dengan kebutuhan masa datang, 5-10
tahun untuk jangka menengah dan 25-30 tahun
untuk jangka panjang.
Perencanaan
adalah
menyangkut
masalah
pembuatan rencana, yang melibatkan masalah
perencanaan
pengoperasian,
perbaikan
dan
perluasan pada sistem tenaga listrik, sehingga
diperlukan:
Analisis Aliran Beban Sistem Tenaga Listrik
dimaksudkan untuk penyempurnaan operasi
sistem tenaga listrik baik pada saat dianalisis
ataupun
masa
yang
akan
datang
yang
menyangkut masalah operasi jaringan atau jatuh
tegangan pada jaringan yang harus dipertahankan
konstan, perluasan sistem berupa lokasi beban
baru atau lokasi pembangkit baru, kondisi sistem
masa yang akan datang karena pertumbuhan
beban yang pesat maupun interkoneksi sistem
3
tenaga listrik untuk mengantisipasi pertumbuhan
beban yang begitu cepat.
Analisis Gangguan Sistem tenaga Listrik
berfungsi untuk memberikan informasi dalam
menjawab masalah pengaman sistem tenaga
listrik, koordinasi isolasi sistem tenaga listrik serta
koordinasi rele dan pemutus tenaga dalam
mengisolasi bagian atau peralatan yang terganggu.
Gangguan yang dimaksud adalah gangguan
parallel (shunt) berupa gangguan simetris dan
tidak simetris, gangguan seri berupa satu fasa dan
dua fasa putus, gangguan simultan berupa
gabungan gangguan shunt pada suatu tempat dan
tempat yang lain atau gangguan seri yang
merupakan kombinasi gangguan diatas.
Analisis Stabilitas Sistem Tenaga Listrik
menyangkut masalah kemampuan sistem untuk
tetap sinkron selama terjadi gangguan misalnya
karena jatuhnya suatu pembangkit tenaga,
stabilitas penambahan beban baru, pemasangan
motor besar yang telah ada, penambahan unit
pembangkit baru dan keperluan pengaturan beban
puncak.
4
BAB II
DAYA DALAM RANGKAIAN
ARUS BOLAK-BALIK FASA
TUNGGAL
Tujuan Umum:
Mahasiswa dapat memahami teori dasar serta
pengertian daya sebagai perubahan tenaga listrik
Tujuan Khusus:
Mahasiswa dapat memahami daya untaian
dalam satu gerbang dengan satuannya
Mahasiswa mengenal berbagai macam daya (
daya aktif, daya rekatif dan daya kompleks)
Mahasiswa
memahami
persamaan
daya
termasuk persamaan daya kostan dan sinusoidal
Mahasiswa mempu mengoperasikan persamaan
daya dan faktor daya
5
A. Pendahuluan
Menurut teori dasar pengertian daya didefinisikan
sebagai perubahan tenaga terhadap waktu. Satuan
daya adalah watt, daya yang diserap suatu beban
adalah hasil kali tegangan jatuh sesaat diantara
beban dengan satuan volt, dengan arus sesaat
yang mengalir dalam beban tersebut dengan
satuan amper, yang dinyatakan oleh persamaan:
(2.1)
p (t ) v(t ).i (t )
+
i(t)
N
V(t)
Gambar (2.1). Daya Dalam Untai satu gerbang
Diandaikan bahwa tegangan dan arus, keduanya
dinyatakan oleh gelombang sinusoidal dengan
kecepatan sudut , dituliskan dengan pernyataan
sebagai berikut:
vt Vmax cos t v
(2.2)
i t I max cos t i
(2.3)
dengan : Vmax = besarnya dari amplitudo tegangan
Imax = besaran nyata dari amplitudo arus
v = sudut fasa dari tegangan ( V )
i = sudut fasa dari arus ( I )
Berdasarkan persamaan (2.2) dan persamaan (2.3)
akan diperoleh daya sebagai berikut:
pt Vmax I max cos t v cos t i
6
1 / 2 Vmax I max cos v i cos2 t v i
(2.4)
Dari persamaan (2.4) dapat dilihat bahwa daya p(t)
terdiri dari dua bagian, yang satu terdiri dari
komponen yang konstan dan bagian yang kedua
terdiri dari komponen sinusoidal dengan frekuensi
2 . Nilai dari p(t) adalah nol bila salah satu dari
v(t) dan i(t) bernilai nol.
Selanjutnya bila didefinisikan sudut faktor sebagai
berikut:
v i
(2.5)
dan P daya rata-rata pada satu periode, T 2 / ,
dari persamaan (2.4) akan diperoleh:
T
P 1 / T p t dt 1 / 2 Vmax I max cos
(2.6)
0
Bila menghitung harga daya P mempergunakan
phasor dari v(t) dan i(t), dalam teori rangkaian
pilihan phasor tegangan adalah harga efektifnya,
dengan demikian dapat dituliskan bahwa:
vt Vmax cos t v V
vt Re 2 V
j t
Vmax
2
e j
(2.7)
(2.8)
Nilai sesaat dari tegangan adalah v(t), sedangkan
harga efektifnya atau harga rms (root mean-square)
adalah
V Vmax / 2
yang dapat dibaca pada
meter.
Seandainya menghitung disipasi daya rata-rata
dalam suatu resistansi R yang dihubungkan
7
sumber tegangan sinusoidal dengan harga efektif V
maka dapat dituliskan:
T
P 1/ T
T
pt dt 1 / T vt / R dt V / R
2
0
0
Persamaan tersebut sama halnya dengan yang
didapatkan pada kasus arus searah, sehingga jika
tegangan efektif 120 volt, maka didapatkan bahwa
energi panas rata-rata keluar dari resistans sama
halnya dengan tegangan searah 120 volt.
Pembahasan yang sama dapat dilakukan untuk
arus efektif yang mengalir pada resistans R,
sehingga persamaan menjadi:
P I
2
RV
2
/RV I
Dengan demikian maka dapat dinyatakan secara
umum bahwa phasor tegangan yang dinyatakan
pada persamaan (2.6) dapat dituliskan sebagai
berikut:
P 1 / 2 Vmax I max cos V I cos
Re V e jv I
ji
Re V I *
(2.9)
dimana: *) = menyatakan nilai kebalikan atau
bayangan
(conjugate). Besaran
cos
pada
persamaan (2.9) dikenal sebagai faktor daya
(power faktor = PF) sehingga dituliskan sebagai
berikut:
PF cos
(2.10)
Dalam persamaan (2.9), nilai Re VI*, dan nilai ImVI*
masing-masing dapat dinyatakan oleh daya
kompleks S dan daya reaktif Q, sehingga dapat
dituliskan:
8
S VI *
Q I m VI *
S VI V I e
*
(2.11)
jq
P jQ
(2.12)
dari persamaan (2.12) S dinyatakan dalam bentuk
polar dan dalam bentuk segitiga dan S
dinyatakan oleh , seperti pada gambar berikut:
i(t)
S
v
N
S
P
i
v(t)
Q
Gambar 2.2 Daya Komplek dalam Jaringan satu
Untuk mengetahui arti phisik dari daya reaktif Q,
dapat dicoba dengan mengganti N dengan suatu
induktor seperti pada contoh soal berikut:
Contoh soal 2.1.
Untuk impedans Z = jωL, hitung
a. nilai Q
b. daya sesaat dalam L
c. bandingkan hasil a dan b
jawab:
a. Menggunakan
rumus
didapatkan,
S VI * ZII * Z I j L I
2
Q Im S L I
2.12,
maka
2
2
b. Jika arus diberikan oleh persamaan,
i t 2 I cos t
9
vt L di / dt 2 L I sin t
maka
nilai
pt vt i t 2 L I sin t cos t
2
L I sin 2 t
2
c. Perbandingan hasil
didapatkan bahwa:
bagian
(a)
dan
(b)
pt Q sin 2 t
Dalam hal ini Q adalah amplitudo atau nilai
maksimum dari daya sesaat dalam untai atau
rangkaian satu gerbang N. Dalam contoh soal ini
dapat diketahui bahwa daya rata-rata P yang
melayani induktor adalah nol, yang ada adalah
daya sesaat (untuk mempertahankan perubahan
energi dalam medan magnit) dengan nilai
maksimum Q.
Contoh 2.2.
Andaikan ada jaringan dengan impedans Z
a. dapatkan pernyataan untuk P dan Q
b. Nyatakan p(t) dengan tanda P dan Q
c. Andaikan bahwa jaringan adalah rangkaian
RLC, bandingkan hasil yang didapatkan
dengan hasil dari butir (b).
Jawab:
a.
menggunakan
didapatkan:
persamaan
(2.12),
maka
S VI * ZII * Re Z I P j Q , sehingga
2
P Re Z I Z I cos Z
2
2
Q I m Z I Z I sin Z
2
2
10
b. Dengan pilihan yang sesuai yakni,
i t 2 I cos t dan
vt 2 Z I cos t Z
c. Dengan demikian akan didapatkan bahwa:
pt vt i t Z I cos t Z cos t
2
cos Z cos 2 t Z
Z I cos Z cos 2 t cos Z sin 2 t sin Z
P 1 cos 2 t Q sin 2 t
Z I
2
2
d. Dalam hal ini Z R j l 1 / j c . Dari bagian
(a) didapatkan bahwa P R I dan Q QL Qc ,
2
dimana
QL L I
2
adalah
daya
reaktif
masing-masingdalam L dan C, sehingga dapat
dituliskan bahwa:
pt P1 cos 2 t QL sin 2 t QC sin 2 t
Dari persamaan tersebut maka suku
pertama menyatakan daya sesaat dalam R. Suku
kedua dan ketiga masing-masing menyatakan
daya sesaat dalam L dan C. Dalam kasus 2 L C =
1, maka Q QL QC 0
Tabel 2.1. Terminologi daya dengan satuan
Kuantitas
Terminology
Satuan
S
Daya kompleks (daya semu)
VA, KVA, dan MVA
Daya kompleks mutlak
VA, KVA, dan MVA
P
Daya Aktif atau daya real rata-rata
Watt, kW, dan MW
Q
Daya reaktif
VAR, KVAR,
MVAR
S
dan
11
BAB III
GAMBARAN UMUM DARI
SISTEM TENAGA LISTRIK
Tujuan Umum:
Mahasiswa dapat memahami dan membaca
diagram segaris (one line diagram)
Tujuan Khusus:
Mahasiswa dapat memahami pengertian dari
diagram segaris
Mahasiswa dapat merobah diagram segaris
menjadi diagram impedansi dan diagram
reaktansi
Mahasiswa mampu mengolah dari sistem dasar
menjadi sistem perunit (pu)
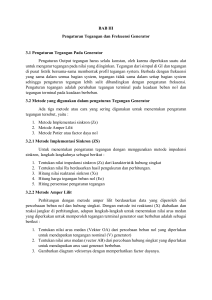
B. Diagram Segaris (one line diagram)
Diagram segaris adalah suatu diagram yang
menunjukan suatu garis tunggal dan lambanglambang standar saluran transmisi dan peralatan-
12
peralatan yang berhubungan dengan suatu sistem
listrik.
Kegunaan
diagram
segaris
dalah
untuk
memberikan informasi yang berarti mengenai
suatu sistem dalam bentuk yang ringkas.
Tabel 3.1. Simbol-simbol komponen sistem tenaga yang
dipergunakan untuk diagram segaris
Simbol
Digunakan
untuk
Simbol
Pemutus
tenaga
dengan
minyak
Mesin
berputar
Bus
(rel
simpul)
Pemutus
tenaga
dengan udara
=
Trafo
tenaga
dua belitan
Trafo
tenaga
tiga belitan
Hubungan
delta
(3,
tiga
kawat)
Hubungan
Wye
(
3,
netral
tidak
ditanahkan)
Hubungan
Wye
(
3,
netral
ditanahkan)
Kapasitor
Digunakan
untuk
Pemisah
or
Sekering
Pemisah
dengan
sekering
Saluran
transmisi
Beban statis
Trafo
potensial
13
Dari gambar simbol standar tersebut apabila ingin
mengetahui letak titik dimana sistem dihubungkan
ketanah, untuk menghitung besarnya arus yang
mengalir terjadi gangguan tidak simetris yang
melibatkan tanah, maka simbol standar yang
dipergunakan adalah tiga fasa Y dengan netral
ditanahkan. Untuk membatasi aliran arus ketanah
pada waktu ada gangguan maka netral Y dengan
tanah disisipkan resistans atau reaktans. Diagram
segaris suatu sistem tenaga yang sederhana terdiri
dari dua simpul (rel atau bus atau gardu induk)
dapat dilihat pada gambar 3.1 berikut:
T1
Beban A
saluran transmisi
T2
Beban B
Gambar 3.1. Diagram segaris sistem tenaga
listrik sederhana
Diagram segaris sederhana tersebut menunjukan
dua generator sinkron dengan kumparan jangkar
yang ada statornya dihubungkan Y, satu titik
netral hubungan bintangnya ditanahkan melalui
reaktans yang satunya titik netral hubungan Y
ditanahkan melalui reaktans, hubungan ke rel,
masing-masing melalui pemutus tenaga, dari rel
tersebut melalui pemutus tenaga dihubungkan
dengan transformator tiga fasa hubungan Y – Y
(T1) dimana netral trafo ditanahkan secara
langsung baik pada sisi tegangan rendah maupun
disisi tegangan tinggi. Selanjutnya rangkaian
14
generator dan trafo tersebut, melalui pemutus
tenaga dihubungkan ke saluran transmisi. Dari
saluran transmisi melalui pemutus dihubungkan
ke transformator tiga fasa hubungan Y - , dimana
titik netral Y ditanahkan langsung, selanjutnya
melalui pemutus dihubungkan ke rel yang lain,
pada rel ini dihubungkan generator sinkron
dimana kumparan jangkar yang ada di stator
dirangkai tiga fasa hubungan Y yang netralnya
ditanahkan memalui reaktans. Pada masingmasing rel dihubungkan beban melalui pemutus
beban. Keterangan mengenai rating generator,
trafo, beban dan reaktans dari berbagai komponen
sistem tenaga tersebut seringkali diberikan
langsung pada gambar.
C. Diagram Impedans dan Reaktans
Dalam aturan untuk menganalisis unjuk kerja dari
suatu sistem tenaga listrik baik dalam keadaan
berbeban atau dalam keadaan terjadi suatu
gangguan hubung singkat, maka diagram segaris
diatas harus dirubah kedalam suatu gambar
impedans yang memperlihatkan ekivalen untai
dari tiap komponen sistem. Sistem tenaga yang
sederhana seperti pada gambar 3.1 diatas, gambar
diagram impedansnya dapat dilihat pada gambar
berikut:
15
E1
+
+ + E2
-
E1
Beban A
Gen 1 & 2
Transformator T1
T2 BGen 3
saluran stransmisi transformator
Beban
Gambar 3.2. Diagram impedans dari diagram segaris
pada gambar 3.1
Diagram impedans yang diberikan pada gambar
3.2
diatas
tergantung
penggunaanya, jika
dipergunakan untuk analisis aliran beban, apalagi
dengan bantuan program komputer maka gambar
tersebut sudah dapat digunakan. Tetapi bila
dipergunakan
untuk
menganalisis
dan
menghitung arus gangguan, agar sederhana maka
rugi-rugi sistem diabaikan, dalam hal ini yang
diabaikan adalah semua beban statis, semua
resistans, rangkaian magnetisasi trafo, dan
kapasitans saluran transmisi, sehingga diagram
impedans
tersebut akan
menjadi
diagram
reaktans, akan tetapi kalau tersedia komputer
digital untuk membantu perhitungan, maka
penyederhanaan tersebut tidak diperlukan.
Diagram reaktans dari diagram segaris pada
gambar 3.1 diatas dapat dilihat sebagai berikut:
16
+ E1 +
-
+
E2
E1
-
-
Gambar 3.3 Diagram reaktans dari diagram segari
pada gambar 3.1
Diagram impedans dan reaktans diatas kadangkadang disebut juga diagram urutan positif karena
diagram tersebut menunjukan impedans terhadap
arus seimbang dalam suatu tiga fasa seimbang.
D. Perhitungan Dalam Sistem Perunit (pu)
Dalam perhitungan besaran-besaran listrik seperti
tegangan, arus, daya, impedans dalam sistem
tenaga, yang sudah lazim dipergunakan adalah
dimensi atau ukuran dari masing-masing besaran
seperti pada tabel 3.2 berikut:
Tabel 3.2. Dimensi/ukuran symbol dari besaran
besaran listrik
No
1
2
3
4
5
6
7
Besaran
Tegangan
Arus
Daya Semu
Daya Aktif
Daya
Reaktif
Impedans
Reaktans
Simbol
V
I
S
P
Q
Dimensi/ukuran
Volt, kV
Amper
VA, KVA, MVA
Watt, KW, MW
AR, KVAR, MVAR
Z
X
Ohm
Ohm
17
Sehubungan dengan dimensi dari besaran-besaran
tersebut diatas berbeda-beda maka untuk
memudahkan dipakai sistem perhitungan dalam
persen (%) dan dalam perunit (pu). Akan tetapi
perhitungan yang dilakukan dalam pu lebih
menguntungkan, karena satu besaran dalam pu
dikalikan dengan besaran yang lain dalam pu
maka hasilnya tetap dalam pu. Jika perhitungan
dilakukan dalam persen , maka satu besaran
dalam persen dikalikan dengan besaran lain yang
juga dalam persen maka hasil akhirnya harus
dibagi dengan angka seratus.
Harga perunit (pu) dari setiap besaran adalah
menyatakan perbandingan dari nilai yang
sebenarnya dari besaran tersebut terhadap nilai
basis atau nilai dasar yang dapat dirumuskan
sebagai berikut:
Nilai perunit ( pu )
Nilai sebenarnya
Nilai basis
(3.1)
Dimensi satuan dari nilai basis dan nilai
yang sebenarnya adalah sama, misalnya nilai yang
sebenarnya dari tegangan adalah 100 volt,
sedangkan nilai basis tegangan misalnya 200 volt,
maka nilai tegangan tersebut dalam pu adalah 0,5,
sehingga nilai suatu besaran dalam pu tidak
mempunyai dimensi satuan lagi.
E. Sistem Satu Fasa
Menghitung nilai basis dari keempat besaran yang
telah dikemukakan diatas untuk sistem satu fasa,
dimulai dengan memberi tanda subskrip pada
harga basis, sehingga jika dua harga basis
18
diasumsikan terlebih dahulu adalah sebagai
berikut:
a.Harga basis daya semu = (VA)B volt amper
b.Harga basis tegangan = VB volt
Harga dua basis yang lain dapat dihitung
dari kedua harga basis yang telah diasumsikan
tersebut, cara menghitungnya adalah sebagai
berikut:
c.Harga basis arus I B
VAB
VB
Amp
(3.2)
2
d.Harga basis impedans Z B
VB
V
B ohm(3.3)
I B V B
Jika harga yang sebenarnya dari impedans
adalah Z (ohm) diketahui, maka harganya dalam
pu adalah sebagai berikut:
Z pu
Z ohm Z x VAB
2
Z B ohm
VB
(3.4)
Pilihan harga basis yang praktis untuk sistem
tenaga satu fasa adalah sebagai berikut:
a. Asumsikan bahwa harga basis daya semu =
(KVA)B atau dalam (MVA)B
b. Diasumsikan juga harga basis untuk tegangan
= (KV)B
Harga dua basis yang lain dapat dihitung sebagai
berikut:
c. Harga basis arus I B
(3.5)
d. Harga basis impedans :
1000 x MVAB KVAB
KV B
KV B
Amp
19
1000 x KV B KV B
1000 x KV B
ZB
MVAB
KVAB
IB
2
2
(3.6)
Jika diketahui nilai impedans yang sebenarnya = Z
(ohm), maka harga impedans tersebut dalam pu
adalah sebagai berikut:
Z pu
Z x MVAB
KV B
2
Z x KVAB
1000 x KV B
(3.7)
2
F. Sistem Tiga Fasa
Perhitungan harga basis untuk sistem tiga fasa,
memakai besaran-besaran basis tiga fasa sebagai
berikut:
a. Diasumsikan harga basis daya semu tiga
fasa = (KVA)B atau (MVA)B
b. Diasumsikan harga basis tegangan antara
fasa =(KV)B
Harga basis dua besaran yang lain dapat dihitung
sebagai berikut:
a.
Harga
basis
arus
1000 x MVAB
3 KV B
KVAB
3 KV B
Amp
(3.8)
b. Harga basis impedans:
ZB
1000 x KV B
3 IB
KV B 2
MVAB
1000 x KV B
(3.9)
KVAB
2
Jika diketahui nilai impedans yang sebenarnya = Z
(ohm), maka harga impedans tersebut dalam pu
adalah sebagai berikut:
Z pu
Z x MVAB
KV B
2
Z x KVAB
1000 x KV B
2
(3.10)
20
G. Mengubah Harga Basis dari Kuantitas
Perunit
Kadang-kadang impedans perunit dari satu
komponen sistem tenaga dinyatakan menurut
harga basis yang berbeda dengan harga basis yang
dipilih untuk bagian dimana komponen tersebut
terpasang.
Semua impedans dalam bagian manapun dari
suatu
sistem
tenaga
harus
dinyatakan
berdasarkan suatu harga basis yang sama, maka
dalam membuat perhitungan diperlukan cara
untuk mengubah impedans perunit berdasarkan
harga basis yang lama ke impedans perunit
berdasarkan harga basis yang baru. Berdasarkan
persamaan (3.7) dan (3.10) maka dapat dikatakan
bahwa:
Impedansi perunit dari suatu elemen rangkaian:
imp sebenarnya dlm ohm x KVAB
1000 x KV B
2
(3.11)
Rumus tersebut memperlihatkan bahwa impedans
perunit berbanding lurus dengan basis daya semu
dan berbanding terbalik dengan kuadrat basis
tegangan . Jika harga basis daya semu berubah
dari (MVA)B lama ke harga basis daya semu yang
baru (MVA)B baru dan harga basis tegangan yang
lama (KV)B lama ke harga basis tegangan yang baru
(KV)B baru maka harga impedans dan reaktans
dalam pu yang lama akan berubah menjadi harga
impedans dan reaktans dalam harga pu yang baru
dengan menggunakan persamaan sebagai berikut:
MVAB baru KV B 2 lama
Z pubaru Z pulama x
x
(3.12)
MVAB lama KV B 2 baru
21
Contoh soal 3.1:
Reaktans subtransien (X”) dari sebuah generator
diketahui sama dengan 0,25 perunit (pu)
berdasarkan harga basis dari rating yang tertera
pada platnama generator yaitu 18kV, 500 MVA.
Sedangkan harga basis untuk perhitungan adalah
20 kV, 100 MVA. Hitung X” berdasarkan harga
basis yang baru.
Jawab:
Berdasarkan persamaan (3.12) diperoleh:
Z pu baru Z pu lama x
MVAB baru
MVAB lama
x
KV B 2 lama
KV B 2 baru
2
18 100
X " 0,25
0,045 per unit
20 500
atau dengan cara mengubah nilai pu yang
diketahui ke dalam nilai ohm dan membaginya
dengan basis impedans yang baru sebagai berikut:
X"
0,25 18 2 / 500
0,0405 per unit
20 2 / 100
Resistans dan reaktans dari suatu mesin, biasanya
diberikan oleh pabrik dalam besaran % atau dalam
besaran pu. Sebagai basisnya yaitu harga basis
tegangan dalam kV dan harga basis daya dalam
KVA adalah rating dari platnama mesin itu sendiri,
jika mesin ini berada dalam sistem tenaga dimana
harga basis perhitungan ditentukan baru, maka
resistans dan reaktans dari mesin tersebut harus
disesuaikan nilai pu nya berdasarkan harga basis
yang baru.
22
H. Nilai pu pada Besaran-besaran Sistem Tenaga
1. Sistem fasa tunggal
a. Daya Semu
Daya semu ini dapat dinyatakan oleh
persamaan sebagai berikut:
S V .I * atau S V .I
jika didefinisikan harga basis untuk daya
semu:
S B VB I B
Maka daya semu dalam pu adalah:
S V .I
SB
V B .I B
S pu V pu .I pu
S pu V pu I * . pu
(3.13)
b. Impedans dalam pu
Menurut hukum ohm, persamaan impedans
: Z V / I , harga basis impedans telah
diberikan oleh persamaan diatas sehingga
harga impedans dalam pu adalah sebagai
berikut:
V pu
Z
V /I
atau Z pu
Z B VB / I B
I pu
(3.14)
2. Sistem tiga fasa
a. Tegangan
Dalam sistem tiga fasa, hubungan Y terdapat
dua harga tegangan yakni tegangan antara fasa
atau tegangan antara saluran (VL-L), dan
tegangan antara saluran dengan netral (VL-N).
23
Jika perhitungan dilakukan dalam harga basis
untuk tegangan antara saluran atau VL-L basis
sehingga:
VL N
basis
VL L
3
jika VL L pu
VL L
VL L basis
dengan Vl N
dan VL N pu
VL N
VL N basis
VL L
3
VL N
VL L / 3
pu
VL N basis VL L basi s / 3
maka V L N
atau V L N pu V L L pu
(3.15)
Berdasarkan persamaan (3.15) tersebut maka
dalam perhitungan dengan pu untuk tiga fasa
hubungan Y, tegangan anatara saluran dan
netral dalam pu sama dengan tegangan antara
saluran dengan saluran dalam pu. Hal ini
merupakan salah satu keuntungan dari
perhitungan dalam sistem pu.
b. Daya Semu
Daya semu dapat dinyatakan oleh persamaan:
S1 fasa
S 3 fasa
3
dengan S 3 fasa basis 3 S1 fasa basis , maka
S1 fasa pu
S1 fasa
S1 fasa basis
S1 fasa pu S 3 fasa pu
S 3 fasa / 3
S 3 fasa basis / 3
(3.16)
24
Berdasarkan persamaan (3.16) tersebut maka
untuk perhitungan dalam pu, daya semu tiga
fasa dalam pu. Hal ini juga merupakan suatu
keuntungan bila perhitungan dilakukan dalam
sistem pu.
c. Impedans
Impedans hubungan Y,
Z Y basis
VL N
basis
2
S 1 fasa basis
atau Z Y basis
V
V
/ 3
S 3 fasa / 3
L L basis
2
2
L L basis
S 3 fasa basis
Dengan definisi bahwa Z
sehingga diperoleh:
basis
= 3 Zy
basis,
Z y pu Z pu
(3.17)
Berdasarkan persamaan (3.17) tersebut maka
impedans tiga fasa hubungan Y dalam pu sama
dengan impedans tiga fasa dalam hubungan
dalam pu. Hal ini juga merupakan suatu
keuntungan dalam perhitungan dengan sistem
pu. Keuntungan lain dalam perhitungan sistem
pu, adalah tidak diperlukan perhitungan lagi
jika suatu impedans dipindahkan dari suatu
sisi ke sisi lain pada sebuah transformator.
Contoh soal 3.2.
Sebuah generator sinkron tiga fasa 20 kV, 300
MVA mempunyai reaktans sub-transien sebesar
20%. Generator ini mencatu beberapa motor
serempak melalui suatu saluran transmisi
sepanjang 64 km (40 mil) yang mempunyai
transformator pada kedua ujungnya seperti
25
diperlihatkan pada diagram segaris pada gambar
3.4. Kedua motor M1 dan M2 masing-masing
mempunyai rating 13,2 kV. Netral motor M1
ditanahkan melalui rektans, sedangkan netral dari
motor M2 tidak diketanahkan. Input nominal
untuk motor M1 dan M2 masing-masing adalah
200 MVA dan 100 MVA, dengan reaktans subtransien masing-masing sebesar X” = 20%.
Transformator tiga fasa T1 mempunyai rating 350
MVA, 13,2/115 kV dengan reaktans bocor sebesar
10%. Transformator T2 mempunyai teraan 300
MVA, 116/12,5 kV dengan reatans bocor 10%.
Reaktans seri saluran transmisi adalah 0,5
ohm/km. Gambarkan diagram reaktans dengan
semua
reaktansnya
dalam
besaran
pu.
Pergunakan
rating
generator
untuk
basis
perhitungan.
Gambar 3.4. Diagram segaris
Jawab:
Rating tiga fasa dari transformator T2 adalah 3 x
100 MVA = 300 MVA, dan perbandingan tegangan
antara
salurannya
adalah
3 x 127 / 13,2 kV 220 / 13,2 kV .
Sebagai
basis
perhitungan adalah rating generator yakni 300
MVA sebagai basis daya, 20 kV sebagai basis
26
tegangan,
sehingga
seluruh
sistem
harus
mempergunakan basis daya yang baru sebesar
300 MVA tersebut, sedangkan basis tegangannya
harus memperhatikan perbandingan transformasi
dari transformator. Pada saluran transmisi basis
dayanya 300 MVA sedangkan basis tegangannya
sebesar 230 kV dengan T1 mempunyai rating
230/20 kV. Pada rangkaian motor, basis dayanya
300 MVA sedangkan basis tegangannya adalah
230 x 13,2 / 220 13,8 kV . Basis tegangan ini telah
dicantumkan pada gambar 3.4 diatas reaktans
transformator yang disesuaikan dengan harga
basis yang baru:
Transformator T1: X 0,1 x 300 / 350 0,0857 pu
Transformator T2: X 0,1 x 13,2 / 13,8 0,0915 pu
Basis
impedans
saluran
transmisi
adalah
(230)2/300 = 176,3 ohm, sehingga reaktans
saluran dalam pu adalah (0,5 x 64)/176,3 =
0,1815 pu
Reaktans motor M1 = 0,2 (300/200) x (13,2/13,8)2
= 0,2745 pu
Reaktans motor M2 = 0,2 (300/100) x (13,2/13,8)2
= 0,5490 pu
Diagram reaktans yang diminta adalah seperti
pada gambar 3.5 berikut:
2
27
k
j 0,0857
j 0,1815
l
j 0,0915
n
m
p
r
j 0,2
j 0,2745
+
Eg
+
+
Em2
-
-
Em1
-
j 0,5490
Gambar 3.5. Diagram reaktans yang dinyatakan
dalam pu berdasarkan harga basis perhitungan
Contoh soal 3.3
Jika motor M1 dan M2 pada contoh 3.2 diatas
berturut-turut mempunyai masukan 120 dan 60
MW pada 13,2 kV, dan keduanya bekerja dengan
factor daya satu, hitung tegangan terminal
generator.
Jawab:
Bersama-sama kedua motor menyerap 180 MW
atau 180/300 = 0,6 pu, oleh karena itu dengan V
dan I pada motor dalam pu adalah V . I 0,6 pu ,
dan karena :
V 13,2 / 13,8 0,9565 0 pu
I 0,6 / 0,9565 0,6273 0 pu
Pada generator:
V 0,9565 0,6273 j 0,0915 j 0,1815 j 0,0857
0,9565 j 0,2250 0,9826 13,2 pu
Tegangan terminal generator adalah 0,9826 x 20
kV = 19,65 kV.
28
Soal Latihan:
1.
Sistem tenaga yang sederhana seperti pada
gambar berikut:
2.
G
150 ohm
1
M
2
Data teknik komponen sebagai berikut:
Generator
: 40 MVA, 25 kV,
X” = 20%
Motor
: 50 MVA, 11 kV,
X” = 30%
Transformator Y-Y
: 40 MVA, 33 Y –
220 Y kV, X” = 30 %
Tranformator Y-
: 30 MVA, 11 220 Y kV, X” = 15%
Gambarkan diagram reaktansnya untuk
sistem tenaga tersebut, dimana semua
reaktansnya dalam sistem pu, pergunakan
basis (dasar) hitung, 100 MVA, 220 kV pada
saluran 50 ohm.
3.
Diagram segaris dari suatu sistem tenaga
yang tidak dibebani diperlihatkan pada
gambar berikut:
29
1
C
T1
B
A
j 80 ohm
1
T2
j 100 ohmE
F
2
T3
D
Generator dan transformator mempunyai
data sebagai berikut:
Generator 1
: 20 MVA, 13,8 kV, X” =
0,2 pu
Generator 2
; 30 MVA, 18 kV, X” =
0,2 pu
Generator 3
: 30 MVA, 20 kV, X” =
0,2 pu
Transformator T1 : 25 MVA, 220Y/13,8
kV, X” = 10%
Transformator T2 : Satu transformator
tiga fasa yang dirangkai dari tiga
Transformator 1 , rating masing-masing
10MVA,
127/18kV, X = 10%
Transformator T3 : 35 MVA, 220Y/20Y
kV, X” = 10%
Gambarkan diagram reaktans dengan
semua reaktans diberikan dalam besaran
pu, pilih basis 50 MVA, 13,8 kV pada
rangkaian generator.
30
2
3.
Suatu sistem tenaga yang sederhana seperti
pada diagram segaris berikut:
j 40 ohm
1
2
j 20 ohm
j 20 ohm
B
A
C
3
Data sistem seperti berikut:
Generator 1
: 20 MVA, 18 kV,
X” = 20%
Generator 2
: 20 MVA, 18 kV,
X” = 20%
Motor Serempak 3
: 30 MVA, 13,8
kV, X” = 20%
Transformator Y-Y tiga fasa
: 20 MVA,
138Y/20Y kV, X” = 10%
Transformator Y- tiga fasa
: 15 MVA,
138Y/13,8 kV, X” = 10%
Gambarkan diagram reaktans untuk sistem
tenaga tersebut, dimana semua reaktans
dalam sistem pu, pergunakan satu basis
(dasar), 50 MVA, 138 kV, pada saluran 40
ohm, untuk seluruh sistem.
31
BAB IV
STUDI ALIRAN DAYA
Tujuan Umum:
Mahasiswa dapat menghitung aliran-aliran daya
pada saluran-saluran dan kemudian memeriksa
kapasitas semua peralatan yang ada dalam
sistem apakah cukup besar untuk menyalurkan
daya yang diinginkan.
Tujuan Khusus:
Mahasiswa dapat memeriksa tegangan-tegangan
pada setiap rel dan memeriksa profil tegangan
sistem, biasanya variasi tegangan yang diizinkan
berkisar – 5% sampai + 5%.
Mahasiswa dapat menentukan operasi sistem
yang ekonomis.
Mahasiswa menentukan kedudukan sadapansadapan transformator untuk operasi yang
ekonomis.
Mahasiswa meminimumkan rugi-rugi transmisi
sistem.
32
Mahasiswa dapat memperoleh kondisi mula
untuk studi-studi lanjutan, seperti hubungan
singkat dan kestabilan.
A. Representasi Sistem
Sebelum studi aliran beban itu dilakukan sistem
itu harus terlebih dahulu dipresentasikan dengan
suatu diagram pengganti (diagram impedansi).
Representasi sistem untuk studi aliran beban ini
terdiri dari:
a. Generator Sinkron
Generator sisnkron biasanya dihubungkan
langsung pada rel atau sering juga melalui
transformator daya. Karena tujuan dari studi
ini adalah untuk mengetahui besar tegangan
rel dan aliran daya, maka generator sinkron
direpresentasikan sebagai suatu sumber daya,
dan tegangan yang diperoleh dari studi ini
adalah tegangan rel dimana generator itu
terhubung.
b. Transformator
Transformator
dipresentasikan
sebagai
reaktansi X saja dengan mengabaikan sirkuit
eksitasi dari tranformator itu sendiri.
c. Kawat transmisi
Kawat transmisi direpresentasikan sesuai
dengan kelas transmisi itu, pendek, menengah,
panjang.
Untuk
transmisi
pendek
menggunakan impedans seri, kawat transmisi
menengah menggunakan nominal PI dan T,
sedangkan
kawat
transmisi
panjang
menggunakan ekivalen T dan PI.
d. Beban-beban
33
Beban-beban dapat dibagi menjadi dua
golongan yaitu beban static atau beban
berputar. Beban static atau beban berputar
biasanya direpresentaikan sebagai impedans
konstan atau sebagai daya konstan Pdan Q,
tergantung dari alat hitung yang digunakan.
B. Alat Pembantu Untuk Studi Aliran Beban
Alat pembantu untuk mengadakan perhitungan
dalam sistem tenaga adalah:
i. Perhitungan dengan tangan
ii. AC atau DC Network Analyzer
iii. Komputer Digital
Didalam
studi
aliran
beban,
sistem
itu
direpresentasikan setepat mungkin, sehingga
sangat sedikit pengabaian dan perhitungannya
juga sangat susah. Untuk sirkuit yang berbentuk
loop hampir tidak mungkin untuk melakukan
studi aliran beban dengan tangan. Oleh karena itu
diperlukan AC Network Analyzer.
C. Macam Rel dan Besaran
Didalam studi aliran beban rel itu dibagi kedalam
tiga kelompok yakni:
a. Rel pedoman, harga scalar V dan sudut
b. Rel generator atau voltage controlled bus
c. Rel beban atau load bus
Pada tiap-tiap rel terdapat empat besaran yakni:
i. Daya real (P)
ii. Daya Reaktif (Q)
iii.Harga scalar tegangan V
34
iv.Sudut fasa tegangan
Pada tiap-tiap rel hanya dua besaran yang
ditentukan sedangkan dua besaran yang lainnya
merupakan hasil akhir dari perhitungan. Besaranbesaran yang ditentukan itu adalah:
a. Rel pedoman: Harga scalar V dan sudut
b. Rel generator: Daya real P dan harga scalar
tegangan V
c. Real beban: Daya Pdan Q
Real pedoman itu berfungsi untuk mensuplay
kekurangan daya real dan daya reaktif termasuk
rugi-rugi pada kawat transmisi, karena rugi-rugi
ini baru dapat diketahui setelah solusi akhir
diperoleh. Pemberian besaran untuk rel-rel diatas
berlaku baik bila perhitungan dilakukan dengan
AC Analyzer maupun dengan komputer digital.
Untuk memudahkan persoalan aliran daya, cara
yang paling lama tetapi masih digunakan adalah
bentuk “admitans rel”:
I rel Yrel .Yrel
(4.1)
dimana I, Y dan V merupakan matrik
D. Persamaan Pembebanan
Daya real dan daya reaktif pada salah satu bus p:
Pp j Q p V p I p
*
dan arus:
35
Ip
Pp j Q
Vp
(4.2)
*
Ip bertanda positif bila arus mengalir menuju rel,
bertanda negatif bila arus mengalir meninggalkan
rel. Bila elemen shunt belum termasuk matrik
parameter maka arus total pada rel p adalah:
Ip
Pp j Q p
Vp
*
dimana: yp
y p Vp
(4.3)
= admitans shunt total pada rel p
yp Vp = arus shunt yang mengalir dari rel p ke
tanah
E. Persamaan Aliran Kawat
Setelah tegangan-tegangan rel diketahui, maka
aliran daya dapat dicari. Arus yang mengalir dari
rel p ke rel q adalah:
I pq V p Vq y pq
y ' pq
Vp
2
(4.4)
dimana:
y pq = admiatns kawat p dan q
y ' pq = admitans kawat p – q
V p y ' pq / 2 = konstribusi arus pada rel
a. Persamaan Daya
Daya yang mengalir dari rel p ke rel q :
Ppq j Q pq V p I * pq
36
atau :
Ppq jQ pq V p V * p V * q y * pq V p V p
*
y ' pq
2
*
(4.5)
sedangkan daya yang mengalir dari rel p ke rel
q:
Pqp jQqp Vq V * q V * p y * pq V * q Vq
Jumlah aljabar persamaan (4.5)
adalah rugi-rugi pada transmisi.
y ' pq
(4.6)
2
dan
(4.6)
F. Teknik Pemecahan
Sebagaimana
disebutkan
diatas,
teknik
pemecahan disini ditunjukan pada penggunaan
komputer. Walaupun demikian teknik pemecahan
ini dapat juga dilakukan dengan tangan apabila
sistem yang digunakan sangat sederhana secara
sederhana.
Pemecahan yang paling banyak digunakan adalah
metode iterasi Gauss-Seidel dan Newton-Rapshon
dengan menggunakan bentuk admitans rel. Dalam
metode ini tegangan pada rel-rel , kecuali rel
pedoman, diberi harga sembarang biasanya 1,0
pu, setelah itu harus dihitung untuk semua rel
kecuali rel pedoman dengan persamaan sebagai
berikut:
Ip
Pp j Q p
Vp
*
p = 1,2,……………………………,n
ps
37
dimana; n = jumlah rel dalam sistem
s = nomor rel pedoman
Misalkan kita mempunyai sistem yang terdiri dari,
n = 4, rel no 1 dipilih sebagai rel pedoman,
sehingga s = 1, dan persamaan arus menjadi:
I 1 Y11 V1 Y12 V2 Y13 V3 Y14 V4
I 2 Y21 V1 Y22 V2 Y23 V3 Y24 V4
I 3 Y31 V1 Y32 V2 Y33 V3 Y34 V4
I 4 Y41 V1 Y42 V2 Y43 V3 Y44 V4
dengan
Y pp admi tan s total pada rel p
Y pp y pq y p
Y pq y pq admi tan s kawat p q
Karena rel 1 dipilih sebagai rel pedoman, maka I1
tidak perlu dihitung, perhitungan dimulai dari I2
dan seterusnya. Karena Ip arus total pada
rel p,
maka:
Ip
Pp j Q p
Vp *
atau
I2
P2 jQ2
Vp
*
Y12V1 Y22V2 Y23V3 Y24V4
Sehingga
38
V2
1 P2 jQ2
Y21V1 Y23V3 Y24V4
*
Y22 V2
(4.8)
Dalam bentuk umum
n
1 Pp jQ p
Vp
Y pqVq
*
Y pp
Vp
q 1
q p
(4.9)
dimana: p = 1,2,3,…………………..n ,
ps
Sebelum membicarakan teknik pemecahan Gausssheidell atau Newton-Rapshon, terlebih dahulu
diberikan dibawah ini teknik pemecahan secara
pendekatan.
G. Pemecahan Aliran Daya Secara Pendekatan
Dalam teknik pemecahan aliran daya secara
pendektatan ini dibuat asumsi-asumsi sebagai
berikut:
a. Karena tahanan-tahanan kecil diabaikan
/ 6
b. p q kecil
sehingga
sin p q p q
c. Semua rel, kecuali
sebagai generator (PV)
Jadi
Pp V p
n
V
q 1
q
rel
pedoman
diladeni
V pq cos pq q p
39
Vp
n
V
q 1
q
Y pq p q
(4.10)
Qp Vp
Vp
n
V
q 1
n
V
q
Y pq sin pq q p p 1,2,3,.........., n
Y pq cos p q V p Y pp p 1,2,3,...........n
2
q
(4.11)
p = 1,2,………………,n
dimana Q pq 90 dan pp 90
Karena semua rel PV, harga-harga V p diberikan,
maka persamaan (4.10) memverikan suatu
persamaan linear dalam p yang terdiri dari (n-1)
jumlah persamaan, karena 1 untuk rel pedoman
diberikan.
Persamaan (4.10) dapat dipecahkan langsung
untuk 2 , 3 ,......... n , dan dengan memasukan
harga-harga
2 , 3, ............ n
dalam
persamaan
(4.11) diperoleh harga-harga Qp.
Dengan asumsi-asumsi diatas persamaan (4.10)
dan (4.11) telah dipisahkan, sehingga tidak perlu
dipecahkan secara simultan.
40
Contoh 4.1
S3 = -2 + jQ3
S1 =1 +1Q1
V1 1,0
1
3
V3 1,0
j 0,15
j 0,1
j 0,2
j = 0,1
j = 0,15
V4 1,0
4
2 V2
S4 = -2 + jQ4
1,0
S2 = 3 + jQ2
Gambar 4.1. Sistem 4 rel
Tabel 4.1. Data tegangan, beban dan generator
untuk contoh 4.1
Beban
Rel
Tegangan
Generator
Keterangan
41
PD
QD
PG
QG
1
1,0
1,0
0,5
2
1,0
1,0
0,4
4,0
Rel pedoman
Rel PV
3
1,0
2,0
1,0
0
Rel PV
4
1,0
2,0
1,0
0
Rel PV
Karena rugi-rugi diabaikan, maka
dihitung dari generator pedoman
PG1
bisa
PG1 PD1 PD 2 PD 3 PD 4 PG 2
1 1 2 2 4 2 pu
-j 21,667
j5
j6,667
j10
11
Yrel =
-j5
-j21,667
j10
j6,667
-j6,667
j10,0
-j16,667
j10
j6,667
-j16,667
Jadi
P2 3 5 2 1 10 2 3 6,667 2 4
P3 2 6,667 3 1 10 3 2
P4 2 10 4 1 6,667 4 2
(4.12)
Bila 1 = 0 (pedoman), maka dengan menentukan
persamaan (4.12) sehingga,
2 4,41 , 3 4,23 4 5,11
Subsitusikan harga-harga ini kedalam persamaan
(4.11):
42
Q1 5 cos 4,41 6,667 cos 4,23 10 cos 5,11 21,667
0,07 pu
Q2 5 cos 4,41 10 cos 8,64 6,667 cos 9,52 21,667
0,02 pu
Q3 6,667 cos 4,23 10 cos 8,64 16,667 0,132 pu
Q4 10 cos 5,11 6,667 cos 9,52 16,667 0,132 Pu
Sehingga
QG1 Q1 0,5 0,570 pu
QG 2 Q2 0,4 0,620 pu
QG 2 Q3 1,0 1,132 pu
1,132
QG 2 Q4 1,0
pu
3,454
4
4
p 1
p 1
Qrugi rugi QGP Q DP
3,454 2,3 0,554 pu
Aliran daya pada kawat:
Vp Vp
Ppq
X pq
Q pq
P13
Vp
2
X pq
sin p q Ppq
V p Vq
X pq
cos p q
sin 4,23
1
sin 1 3
0,492 pu
0,15
0,15
43
1
1
cos 1 3 0,018 pu
0,15 0,15
sin 4,41
1
P12 P21
sin 1 2
0,385 pu
0,2
0,2
Q12 Q21 0,015 pu
P14 0,891 pu Q14 0,04 pu
Qrugi 2 0,018 0,113 0,015 0,092 0,04 .2 0,556 pu
Q13
Hasil-hasil perhitungan aliran daya diberikan pada
gambar (4.2.)
j 1,132
2 + j0,57 1 +j 0,5
2=j1
10
1
3
0,492 +j 0,018
1 4,23
0,492 - j 0,18
1,502 - j 0,113
0,891 = j 0,04
0,385 - j0,015
1,502 + j0,113
0,385 + j 0,015
0,891 - j 0,04
15,11
2
4
1,103 - j 0,092
2+j1
14,41
1,103 + j 0,092
4 + j 0,2
1 + j0,4
j 1,132
44
Gambar 4.2. Hasil perhitungan aliran daya untuk
contoh 4.1
H. Hasil Iterasi Gauss-Sheidell
Metode iterasi atau metode ulang adalah suatu
metode coba-coba yang sangat baik dalam
penggunaan
computer
untuk
memecahkan
persamaan-persamaan
simultan.
Teknik
Penggunaan metode Gauss-Sheidell ini dapat
dilihat dibawah ini untuk memecahkan masalah
(4.9). Karena p = 1 adalah rel pedoman maka
perhitungan dimulai dengan p = 2 jadi,
P jQ
k
k
2
2
Y
V
Y
V
Y
V
21
1
23
3
24
4
*
V2 k
1 P3 jQ3
k 1
k
Y
V
Y
V
Y
V
31 1
32
2
34
4
Y33 V3k *
V k 1
V3k 1
1
Y22
(4.13)
V4k 1
1
Y44
P jQ
k 1
k 1
4
Y
V
Y
V
Y
V
4
41 1
42
2
43
3
*
V4k
Seperskrip k+1 menyatakan Nomor iterasi dimulai
dengan k = 0, bila V pk 1 V pk V pk 1 ,
dinamakan indeks ketelitian atau indeks persisi
dan biasanya diambil 0,0001.
1. Faktor Percepatan (Accelaration Factor)
Dalam proses iterasi ini sering diperoleh
kovergensi yang lebih cepat, sehingga jumlah
iterasi lebih sedikit, dengan menggunakan
factor percepatan pada tiap hasil iterasi.
Misalkan factor percepatan, maka harga
dipercepat sebesar:
45
V pkc1 V pk V pk 1 V pk
(4.14)
Menggantikan harga V pk 1 dalam perhitungan
selanjutnya, maka perhitungan selanjutnya
V3k 1 terlebih dahulu dihitung dan harga V2k 1
dipercepat sebasar:
V2kc1 V2k V2k 1
V3k 1
1 P3 jQ3
Y31V1 Y32V2 V2k(c 1) Y34 V4k
k
Y33 V3
V3kc1 V3k V3k 1 V3k , dan
P jQ
4
Y41 V1 Y42 V2k(c 1) Y43 V3k( c)1
4
*
V4k
Selanjutnuya dicari V4k( c 1) dan seterusnya. Harga
berkisar antara 1,4 dan 1,7. Harga yang
V4k 1
1
Y44
kecil untuk sistem yang kecil dan harga yang
besar untuk sistem yang besar.
2. Rel Geberator (Voltage Controlled Bus)
Persamaan daya pada rel P dapat di tunjukan
oleh persamaan berikut:
Pp jQ p V p I p V p
*
n
Y
q 1
*
pq
Vq*
untuk menyelesaikan rel PV dibutuhkan
representasi koordinat salib sumbu, seperti
contoh berikut:
V p p j f p V p* e p j f p
Y pq G pq jB pq
46
Jadi
Pp jQ p e p j f p G pq jB pq eq j f q (4.
n
q 1
15)
Daya reaktif pada rel P
Q p I m V p
n
Y
q 1
*
pq
Vq*
n f
p e q G pq f q B pq
Q p e 2p B pp f p2 B pp
Q 1
e p f q G pq e q B pq
(4.16)
Setelah Q dihitung, hasil ini dimasukkan pada
persamaan (4.9) untuk menghitung V k 1 .
Harga-harga e p dan f p harus memenuhi rekasi
e 2p f p2 V p
2
(4.17)
supaya
daya
reaktif
yang
diperlukan
menghasilkan tegangan yang telah dijadualkan
dapat dihitung. Harga estimasi dari e kp dan f pk
harus diatur agar memenuhi persamaan (4.17).
Sudut-sudut fasa dari tegangan yang diestimasi
adalah:
arc tan
k
p
f pk
e kp
(4.18)
Bila dimisalkan sudut-sudut fasa tegangan
yang diestimasi dan dijadualkan sudah sama,
maka harga-harga baru dari e kp dan f pk adalah:
47
e kp baru V p jadual cos kp
f pk( baru ) V p jadual sin pk
subsitusikan harga-harga baru persamaan
(4.19) dalam persamaan (4.16) diperoleh harga
Q pk , dan harga ini bersama-sama dengan V pk(baru )
dipakai untuk menghitung harga tegangan
yang baru, V pk 1 .
Dalam praktek harga Q untuk sesuatu
pembangkit harus dibatasi, dan biasanya
diambil:
Qmin 0,6 ps
Qmaks 0,8 ps
Bila harga Q pk yang dihitung melebihi Qmaks ,
maka harga maksimum ini diambil sebagai
daya reaktif pada rel generator yang
bersangkutan. Bila harga Q pk lebih kecil dari
Qmin , harga minimum ini diambil sebagai daya
reaktif pada rel generator yang bersangkutan.
Dalam hal ini jelas tidak mungkin diperoleh
harga tegangan yang telah dijadualkan , maka
harga V pk ( baru ) tidak dapat digunakan untuk
menghitung V pk 1 .
Dengan demikian rel tadi harus dirubah
menjadi rel beban dan tegangan yang berikan
tidak bias dipertahankan lagi. Tetapi pada
iterasi berikutnya rel yang ditentukan tersebut
ditentukan sebagai rel generator.
Contoh 4.2.
Dalam gambar dibawah ini diberikan oleh sebuah
sistem yang terdiri dari tiga rel. Data transmisi
48
beban dan generator diberikan pada tabel 4.2 dan
4.3. Lakukan iterasi Gauss-Sheidell untuk
memperoleh tegangan.
G
G
2
1
3
Gambar 4.3. Sistem tiga rel
Rel 1 = rel pedoman, V1 1,05 j 0,00 , factor
percepatan = 1,6 untuk P dan Q. Indeks persisi =
0,001
Tabel 4.2 . Data-data kawat transmisi
Kode rel
p-q
Impedans
Spq
1–2
1–3
0,8 + j 0,26667 pu
0,2 + j 0,06667 pu
Admitans
Shunt
pq1/2
0
0
49
2–4
0,59998 + j 0,2 pu
0
Tabel 4.3 . Data Pembangkitan, beban dan tegangan
rel permulaan
Kode Rel
P
1
2
3
Tegangan
Permulaaan
1,05 + j 0,00
1,00 + j 0,00
1,00 + j 0,00
Generator
Beban
MW
MVAR
MW
MVAR
20
0
-0
0
0
0
50
60
0
20
25
Keterangan
Rel pedoman
Rel beban
Rel beban
a. Matrik Admitansi Rel
Kode Rel ( p – q )
Admitansi
1-2
1-3
2-3
1,2500 + j 18,7500
5,0000 + j 15,0000
1,6667 + j 5,0000
y pq 1 / z pq
Y11 Y12 y13 6,2500 j 18,7500
Y22 y 23 y 21 2,9167 j 8,7500
Y33 y 31 y 32 6,6667 j 0,7500
Y12 y12 1,2500 j 20,00
Y13 y13 5,000 j 15,00
Y23 y 23 1,6667 j 5,000
Yrel =
6,2500
+ -1,2500 + j -5,0000 + j
j18,7500
3,7500
15,0000
-1,2500 + j 2,9167 – j -1,6667 + j
50
13,7500
8,7500
5,0000
-5,000 + j -1,6667 + j 6,6667 - j
15,0000
5,0000
20,0000
b. Perhitungan Daya Bersih Rel
Daya bersih untuk p = 2 dan 3 adalah
Pp jQ p daya bersih pada relp
Pp j Q p PGp jQGp PIp j QIp
untuk p = 2,
Daya bersih rel 2 = (0,20 – j 0,00) – (0,50 – j 0,23) =
-0,30 + j 0,20
Daya bersih rel 3 = (0 + j0) – (0,6 – j 0,25) = -0,6 + j
0,25
c. Solusi Iterasi Gauss-Sheidell
V1 1,05 j 0,00
V20 1,0 j 0,00
V30 1,0 j 0,00
Iterasi ke 1:
0,30 j 0,20
1,25 3,751,05
1
1,00 j 0,00
V
2,9167 j 8,75
5 j151,00
1
2
V21 0,9905 j 0,0240
V21 V21 V20 0,9905 j 0,0240 1,00 j 0,00
V21 0,0095 j 0,0240 0,0258 x 0,001
51
V21( c ) 1,00 j 0,00 1,6 0,0095 j 0,0240
V21( c ) 0,9648 j 0,0384
V31
0,60 j 0,25
1
5 j 151,05
6,6667 j 20 1,00 j 0,00
1,6667
j 5,00,9848 j 0,0384
V31 1,0135 j 0,0328
V31 1,0135 j 0,0328 1,00 j 0,00
V31 1,0135 j 0,0328 0,0355 x 0,001
V31( c ) 1,00 j 0,00 1,60,0135 j 0,0328
V31( c ) 1,0216 j 0,0525
dengan cara yang sama perhitungan ini dapat
dilakukan untuk iterasi ke 2 dan ke tiga.
Soal Latihan
Selesaikanlah soal pada contoh 4.2 dengan
menggunakan iterasi Gauss-Sheidell bila rel 2
diladeni sebagai rel generator dengan tegangan
1,03 pu. Daya reaktif QG2(maks)= 35 MVAR dan
QG2(min) = -15 MVAR. Pilih factor percepatan untuk
P dan Q = 1,4.
I. Solusi Newton-Rapshon
52
Dengan melihat sebuah persamaan aljabar non
linear yang terdiri dari persamaan:
f1 x1 , x 2 ,.............., x n y1
f 2 x1 , x 2 ,.............., x n y 2
f n x1 , x 2 ,.............., x n y n
(4.20)
Misalkan harga estimasi mula-mula
x1( 0 ) , x 2( 0 ) ,.................., x n( 0 )
Misalkan harga koreksi x1 , x 2 ,.........., x n sehingga
persamaan 4.20 dapat ditulis:
0
x1 , x 2
0
x1 , x 2
f1 x1
f n x1
0
x 2 ,................, x n y1
0
x 2 ,.............., x n y n
(4.21)
a. Perbandingan Solusi Iterasi Gauss-Sheidell
dan Newton-Rahshon
Perbandingan solusi iterasi Gauss-Sheidell dan
Newton-Rapshon adalah sebagai berikut:
1. Memori
yang
diperlukan
2. Operasi matematika
3. Waktu per iterasi
4. Kecepatan
konvergensi
5. Jumlah iterasi
Gauss-Sheidell
NewtonRapshon
Sedikit
Banyak
Sedikit
Banyak
Singkat
Lebih lama
Lambat
Cepat
Banyak
sekali
tergantung pada
Sedikit sekali
53
jumlah rel
6. Besar sistem
7. Pemogramam
8. Sistem radial
Tidak
tergantung
jumlah rel
Baik
untuk
sistem kecil
Mudah
Baik
untuk
sistem besar
Sering
tidak
konvergen
Sukar
Baik
J. Solusi Aliran Beban Decoupled
Langkah pertama dengan memisalkan semua rel
adalah PQ, kecuali rel pedoman dan tahanantahanan transmisi diabaikan, sehingga
y pq j b pq
y pq jbp q
I pq I pq I pq V p Vq y pq V p y pq
S pq Ppq j Q pq V p I pq
*
V p V p Vq j b pq V p V p j b pq
*
*
*
*
*
(4.22)
Daya kompleks yang diinjeksikan pada rel p
diperoleh dengan menjumlahkan semua daya yang
memasuki saluran-saluran yang terhubung pada
rel p.
S p Pp j Q p j b pqV p V p Vq V p V p
q
*
*
*
jb
2
j
P j Q p j b pq V p V p Vq e p q V p2
q
pq
q
jb
pq
q
(4.23)
Jadi:
54
Pp b pq Vq sin p q
q
(4.24)
2
Q p b pq V p Vq cos p q V p b pq b p
q
q
(4.25)
dimana:
b pq b pq = jumlah semua suseptansi yang
q
terhubung rel p:
untuk sudut-sudut yang kecil maka:
p q /6
maka persamaan menjadi:
Pp b pq V p Vq p q
q
(4.26)
Selanjutnya bila dimisalkan bahwa:
V p Vq V tegangan no min al
maka
Pp V
2
b
pq
q
p
q
(4.27)
Persamaan (4.27) dapat lebih mudah diselesaikan
dengan metode iterasi Gaus-Sheidell sehingga
persamaan dalam bentuk:
55
Pp V
p
2
b
pq
q
q
b
pq
q
(4.28)
p dihitung,
Setelah
dilanjutkan
dengan
persamaan (4.28) untuk memperoleh tegangan rel,
sehingga persamaan dapat ditulis:
cos p q 1 1 / 2 p q
2
maka persamaan (4.25 ) menjadi:
b
Qp Vp
pq
V
p
Vq
1 1 / 2
q Vp
2
p
2
b ps
q
Dengan membuat V p V
V
p
Vq
b V
Q p V
b
pq
pq
p
Vq
kecuali dalam bentuk
1/ 2 V
p
q
q V
2
p
2
b p
q
(4.29)
Persamaan (4.29) dapat
iterative dengan menuliskan
Vp
dipecahkan
secara
Q p b pq Vq
q
b
pq
q
(4.30)
56
dimana:
Q p Q p 1 / 2 q p qc
q p V
2
b
pq
q
2
p
q
q p rugi-rugi daya reaktif yang diinjeksikan pada
sistem oleh suseptansi shunt saluran.
Contoh soal 4.3.
2 +j 1 pu
0 + j 2 pu
2
0,02 + j 0,08 pu
0,02 + j 0,08 pu
0,02 + j 0,08 pu
3
1,5 + j 0,6 pu
57
Gambar 4.4. Data-data kawat transmisi untuk
contoh soal 4.3.
Tabel 4.3 . Data Pembangkitan,
tegangan rel permulaan
Rel
Beban
Tegangan
beban
Generator
PG
QG
PG
QG
dan
Ketetangan
1. 1,0 + j 0
1,0 + j 0
2
1
….
….
Rel pedoman
2.
…..
0
0
0,5
1,0
Rel PQ
3.
….
1,5
0,6
0
1,0
Rel PQ
Jawab:
QG3 = 1,0 pu, admitans diabaikan, berdasarkan
persamaan (4.27) V 1
P2
P3
bii
bik
2 b21 b22 b23 b21 1 b22 2 b23 3
3 b31 b32 b33 b31 1 b32 2 b33 3
23,528
11,764
maka
0,5 23,528 2 11,764 3
1,5 23,528 3 11,764 2
2 0,014 rad
3 0,0rad
1
2
2
Q2 11,7640,014 11,764 0,14 0,07 0,9807
2
1
Q3 0,4 x11,764 0,07 2 0,07 0,014 2 0,353
2
58
23,528 V2 11,764 V3 12,7447
23,528 V2 11,764 V2 12,117
jadi
V2 1,065 pu
V3 1,047 pu
V1
Q1 b11 V1 b12 V2 b13 V3
dimana
Q1, Q1
b11 b12 b13
1
2
b12 2 b13 32
2
1
x11,7640,005
2
Q1 0,029
= QG1 1 0,029
Q1
47,056 QG1 1 0,029 23,029 11,764 x 2,112
QG1 0,288 pu
59
BAB V
STUDI HUBUNGAN SINGKAT
TIGA FASA SIMETRIS
Tujuan Umum:
60
Mahasiswa dapat memahami arus hubng singkat
satu fasa dan tiga fasa.
Tujuan Khusus:
Mahasiswa dapat mengenal jenis-jenis hubung
singkat
Mahasiswa dapat menentukan dan menghitung
arus hubung singkat.
Mahasiswa dapat membuat diagram ekivalen
dari hubung singkat untuk masing-masing
kondisi
A. Pendahuluan
Bila hubungan singkat terjadi pada suatu sistem
tenaga, arus akan mengalir diberbagai bagian
sistem. Besaran arus sesaat setelah terjadi
gangguan berbeda dengan besaran beberapa
putaran (cycle), yaitu pada saat pada saat
pemutusan terjadi. Kedua arus diatas jauh
berbeda dengan arus yang akan mengalir setelah
keadaan mantap, yaitu bila gangguan tidak
diisolasi dari sistem (dengan bekerjanya pemutuspemutus tenaga). Pemilihan yang tepat dari
pemutus tenaga yang akan dipakai tergantung
pada dua hal, besarnya arus sesaat setelah
terjadinya hubungan singkat dan besarnya arus
yang harus diputuskan. Berdasarkan hal tersebut
diatas, studi arus hubungan singkat ini bertujuan:
1. Menentukan
besarnya
arus
hubugan
singkat pada suatu titik dalam sistem
tenaga, dan berdasarkan besar arus
tersebut akan ditentukan kapasitas alat
pemutus tenaga yang akan dipergunakan
pada titik tersebut.
2. Menentukan besar aliran arus diberbagai
bagian sistem dan berdasarkan besaran
61
arus tersebut akan didapatkan penyetelan
(setting) dari rele-rele yang mengatur
pemutus daya.
B. Representasi Sistem Tenaga Listrik untuk
Studi Hubungan Singkat
Representasi sistem tenaga listrik telah dibahas
pada BAB II.
C. Hubungan Singkat Generator Tanpa Beban
Pada mesin sinkron terdapat tiga macam reaktans
dengan mengabaikan nilai tahanannya, kecuali
dalam menentukan redaman atau konstanta
waktu. Rekatans-reaktans tersebut adalah:
X d dan X q rekatans sinkron, pada sumbu d dan
q
X d' dan X q' reaktans peralihan pada sumbu d
dan q
X d" dan X q" reaktans peralihan pada sumbu d
dan q
Kedua macam terakhir bukan reatans sebenarnya,
tetapi reaktans hipotesis.
Pada umumnya hubungan singkat dalam keadaan
mantap, rektans mesin sinkron terdiri dari
reaktans jangkar X a dan reaktans bocor X 1 .
Sehingga reaktans sinkron sumbu d, dapat dilihat
pada gambar (5.1.a), dimana
X d X a X1
(5.1)
Pada keadaan hubungan singkat yang ketiga
fasanya terjadi hubungan singkat arus komponen
searah (DC) dengan besar yang berbeda-beda,
karena besar gelombang tegangan pada ketiga
62
fasanya tidak sama pada saat hubungan singkat
itu terjadi. Komponen DC ini sulit menghitungnya
dan biasanya dipisahkan dari komponen AC.
Untuk studi hubungan singkat kita hanya
mengkonsentrasikan perhatian pada komponen
AC atau arus hubungan singkat simetris,
sedangkan pengaruh komponen DC dapat
dimasukan
kemudian
dengan
mengalikan
komponen AC tadi dengan suatu factor pengali
(multiplying factor).
Setelah hubungan singkat terjadi, arus hubungan
singkat simetris itu hanya dibatasi oleh rektans
bocor mesin. Tetapi karena fluks udara tidak dapat
berubah seketika (instantaneously), sesuai dengan
teori fluks lingkup konstan, untuk melawan
demagnetisasi dari arus hubungan singkat
jangkar, maka arus kan timbul pada belitan
penguat (beltan eksitasi) demikian juga pada
belitan peredam pada arah fluks utama. Arus-arus
ini menurun sesuai dengan konstanta waktu
belitan-belitannya.
Konstanta
waktu
belitan
peredam yang mempunyai induktans bocor yang
rendah jauh lebih kecil dari konstanta waktu
belitan penguat yang mempunyai induktans bocor
tinggi. Jadi selama beberapa saat dari waktu
hubungan singkat itu pada belitan-belitan
peredam dan lilitan penguat timbul arus induksi,
sehingga pada sirkuit ekivalen reaktans medan
penguat X f
dan reatans belitan peredam X dw
kelihatannya terhubung parallel dengan reaktans
jangkar X a seperti terlihat pada gambar (5.1.b)
63
+
Xa
X1
Xd
Gambar (5.1.a) Sirkuit ekivalen mesin sinkron
dalam keadaan mantap
X dw
X1
+
Xf
Xa
_
Gambar (5.1.b) Sirkuit ekivalen mesin sinkron
selama periode sub peralihan hubungan singkat
Xf
+
X1
Xa
E
_
Gambar (5.1.c) Rangkaian ekivalen mesin sinkron
selama periode sub peralihan hubungan singkat
Setelah
beberapa
saat
kemudian,
karena
konstanta waktu belitan peredam sangat kecil,
64
maka arus belitan peredam itu akan hilang dan
sekarang mesin berada pada keadaan perali han.
Hal tersebut dapat digambarkan dengan membuka
sirkuit peredam X dw pada gambar (5.1.b) menjadi
gambar (5.1.c).
Reaktans yang dipresentasikan oleh mesin selama
periode permulaan dari hubungan singkat itu
disebut reaktans sub perlihan mesin sinkron
dengan persamaan sebagai berikut:
X d" X 1
1
1 / X a 1 / X f 1 / X dw
(5.2)
sedangkan reaktans yang bekerja setelah arus
belitan peredam mati disebut reaktans peralihan
dengan persamaan sebagai berikut:
X d' X 1
1
1 / X a 1 / X f
(5.3)
X d" X d' X d , maka reaktans mesin sinkron
berubah terhadap waktu dimulai dari X d" sampai
X d . Sesuai dengan reaktans-reaktans diatas,
maka aruspun ada tiga macam:
I = arus hubung singkat mantap, yaitu arus
mantap setelah bagian peralihan hilang karena
redaman.
I’= arus hubung singkat peralihan, yaitu arus
selama keadaan peralihan , beberapa saat
setelah hubung singkat terjadi, dan belum
termasuk arus komponen searah (DC).
”
I = arus sub peralihan, yaitu arus maksimum pada
saat terjadi hubung singkat, belum termasuk
komponen DC.
65
Didalam anlisis sistem tenaga, pada umumnya
mesin sinkron itu dianggap sebagai mesin (nonsalient pole), sehingga reaktans pada sumbu d
sama dengan reatans pada sumbu q dan reaktans
itu biasanya diberikan dengan notasi X , X ' atau
X " . Dengan kata lain pengaruh kutub menonjol
itu diabaikan. Untuk generator tanpa beban yang
dihubung singkat, tegangan dalam (internal
voltage) untuk ketiga macam keadaan (mantap,
peralihan, dan sub peralihan) adalah sama, yaitu
E sehingga:
E" E' E
maka arus-arus itu adalah (lihat gambar (5.2))
I
Oa
I'
I"
2
Ob
2
Oc
2
E
X
E
'
X
E
"
X
Seperti sudah disampaikan sebelumnya arus
hubung singkat itu sebenarnya terdiri dari dua
komponen arus, komponen arus bolak-balik (AC)
dan komponen arus searah (DC). Komponen DC
itu tegantung dari besarnya sudut fasa, pada saat
mana hubung singkat itu terjadi, sedang harga
maksimumnya sama dengan harga maksimum
komponen AC.
Bila hubung singkat tiga fasa itu terjadi dalam
keadaan tanpa beban, maka besar arus hubung
singkat itu dapat ditulis sebagai berikut:
66
1 1
1
ia 2 E
'
Xd Xd Xd
2 E
X d" X q"
"
d
2 X .X
"
q
m'd t 1
1
e " '
Xd Xd
e ma t cos 0 2 E
X d" X q"
"
d
2 X .X
"
q
m"d t
e cos
e ma t cos 2 0
dimana:
md'
Xd Rf
.
X d' L ff
sumbu d
ma
= factor redaman peralihan pada
w X d" X q"
2 X d" . X q"
=
factor
redaman
belitan
jangkar
X d'
X d X d" R11d
m " ' " .
X d X d X d L11d
"
d
= factor redaman sub
peralihan pada sumbu d
Rumus diatas diperoleh secara pendekatan dengan
menggunakan teorema “Fluksi Lingkup Konstan”.
Dari persamaan (5.5) terlihat bahwa arus hubung
singkat terdiri dari tiga komponen, yaitu:
a. Komponen bolak-balik dari frekuensi dasar
b. Komponen searah (DC)
c. Komponen
bolak-balik
dari
frekuensi
harmonis kedua
Tetapi bila pengaruh kutub menonjol itu diabaikan
maka X d" X q" X " , maka komponen bolak-balik
dari frekuensi harmonis kedua itu hilang. Nilai
efektif komponen bolak-balik sebagai funsi waktu,
67
1 1 1
I AC E
X X X
1 m'
m'd t 1
" ' e d t (5.6)
e
X
X
nilai efektif komponennya adalah:
I DC 2
E
X
. cos 0 e
ma t
(5.7)
pada saat t = 0
I AC
E
X"
I DC 2
E
X"
. cos 0
dan harga efektif total arus hubung singkat itu,
I DC I AC I DC
2
2
(5.8)
Arus maksimum komponen searah diperoleh bila
0 0 , maka
I DC 2 .
E
dan
X"
I" E / X
Jadi arus maksimum total, pada t = 0, dan 0 0 ,
2
I maks
I maks
E
E
" 2 "
X
X
E
E
3
1,732
X
X
2
(5.9)
Pada umumnya untuk menghitung arus awal atau
arus seketika yang mengalir pada saat terjadi
hubung singkat digunakan reaktans sub peralihan
baik untuk generator maupun untuk motor.
Dengan demikian untuk menentukan kapasitas
seketika dari alat-alat pemutus daya digunakan
68
reaktans sub peralihan bagi generator dan motor.
Untuk
menentukan
kapasitas
pemutusan
(instantaneous capacity) dari pemutus-pemutus
daya digunakan reaktans sub peralihan untuk
generator dan reaktans peralihan untuk motor.
Contoh 5.1.
Suatu generator 13,2 kV, 30 MVA, 50 Hz
mempunyai reaktans-reaktans X” = 0,2 pu dan X’ =
0,3 pu. Generator itu bekerja pada beban nol
ketika terjadi hubung singkat tiga fasa pada
jepitan-jepitan. Hitunglah arus maksimum total
pada t = 0 dan 0 = 0,30,45, dan 60.
Jawab:
Misalkan tegangan dalam generator pada saat
terjadinya hubung singkat 13,2 kV atau sama
dengan 1 pu. Daya dasar dipilih 30 MVA sebagai
rating generator tersebut. Arus komponen AC tidak
dipengaruhi oleh sudut pemutusan o ,maka
I AC
E"
1
5 pu
"
0,2
X
komponen arus
pemutusan 0
DC
(a).
0 0 0 , E E ' E 1 pu
I DC 2 .
tergantung
dari
sudut
E"
1
. cos 0 2
.1 0,707 pu
"
0,2
X
jadi
I maks 5 2 7,07 2 8,66 pu
69
8,66
(b).
30.000
11,364 Amp
3.13,2
0 30 0
I DC 2 .5. cos 30 0
I maks 5 2 6,12 2 7,9055 pu
I maks 10,374 amp
©.
0 45 0
I DC 2 .5. cos 45 0
I maks 5 2 5 2 7,071 pu
I maks 9,279 amp
(d).
0 60 0
I DC 2 .5. cos 60 0
I maks 5 2 3,5355 2 6,124 pu
I maks 3,036 amp
d. Hubung Singkat Generator Sinkron dalam
Keadaan Berbeban
a. Beban Statik
Bila sebelum gangguan telah ada arus, yaitu
arus beban, arus total generator, termasuk
arus beban dapat diperoleh dengan dua cara;
a). Dengan Theorema Thevenin
b). Dengan menggunakan tegangan dalam sub
peralihan generator
b. Dengan Theorema Thevenin
70
Dalam ganbar (5.3.a) diberikan sebuah
generator sinkron dengan beban ZL. Arus
hubung singkat adalah arus beban IL
Ze
p
jX g
Vt
+
ZL
S
Vf
E"
-
Gambar (5.3.a) Hubung singkat generator sinkron
sebelum gangguan dalam keadaan berbeban
Ze
p
Ig
jX g
+
"
If
"
Vf
ZL
-
Gambar (5.3.b) Hubung singkat generator sinkron
selama gangguan dalam keadaan berbeban
Hubung singkat dilakukan dengan menutup
sakelar S, dan dengan teori Thevenin, arus
yang timbul karena hubung singkat itu adalah
I "f
Vf
Z th
(5.10)
71
Z L Z e jX g"
Z th
Z L Z e jX g
Arus hubung singkat generator, tidak termasuk
arus beban IL,
Ig
ZL
.I "f
jX Z e Z L
"
g
Jadi arus total generator (termasuk arus beban
IL)
I g tot I g" I L
(5.11)
dengan
IL
Vf
ZL
b).Menggunakan
Tegangan
Dalam
Sub
Peralihan Generator
Arus total generator yaitu arus karena hubung
singkat dan arus beban, dapat diperoleh
dengan menggunakan tegangan dalam sub
peralihan generator. Tegangan dalam sub
peralihan generator adalah sebagai berikut:
E g" V f I L jX g" Z e
(5.12)
jadi
I g ( tot )
E g"
jX g" Z e
(5.13)
Contoh 5.2.
Sebuah generator 30 MVA, 13,2 kV, 50 Hz,
mencatu daya pada beban static sebesar 20 MW
72
pada factor daya tertinggal 0,8 dan tegangan 12,8
kV. Generator itu mempunyai reaktans 0,1 pu
pada dasar rating generator. Bila terjadi hubung
singkat tiga fasa pada jepitan beban, hitung
jumlah arus seketika rms simetris, termasuk arus
beban dengan menggunakan
a). Teorema Thevenin
b). Menggunakan tegangan dalam sub peralihan
Jawab:
a). Menggunakan teorema Thevenin
I "f
Vf
Z th
12,8
Vf
0,970 0 pu
13,2
Z th
jX
"
g
Ze ZL
jX Z e Z L
"
g
jX g" j 0,2 pu
Z e j 0,1 pu
ZL
IL
S L 36,87 0
IL
Vf
SL
I L
V f 0 0
20
0,833 pu
30 x0,8
0,833
36,87 0 0,859 36,87 0 pu
0,97
73
0,970 0
ZL
1,129237,87 0 pu
0
0,859 36,87
0,9033 j 0,6775 pu
ZL dapat juga dicari:
ZL
Vf
2
SL
0,970
0 2
0,833 36,87 0
pu
1,129236,87 0 pu
jadi
Z th
j 0,2 0,10,9033 j 0,6775
j 0,2 0,10,9033 j 0,6775
0,254579,62 0 pu
maka
If
"
0,970
3,8114 79,62 0 pu
0,254579,62 0
Arus hubung singkat generator:
Ig
ZL
"
j X g Ze ZL
"
x If
"
1,129236,87 0
x3,8114 79,62 0
0
1,33147,26
3,2335 90 0 pu
j 3,2335 pu
=
Arus total generator:
I g (tot ) I g I L
"
j 3,2335 0,859 36,87 0
j 3,2335 0,6872 j 0,5154
74
0,6672 j 3,7489
3,8114 79,610 pu
c. Dengan Menggunakan Tegangan Dalam
Sub Peralihan Generator
Tegangan dalam sub peralihan generator:
E g V f I L jX g Z e
"
"
0,970 0 0,859 36,87 0 x 0,390 0
0,97 j 0,2062 pu
1,143310,39 0 pu
1,143310,39 0
0,390 0
3,811 79,610 pu
I g (tot )
a). Beban Motor Sinkron
Ze
jXg
"
Ze
IL
IL
j Xm
jXg
Vf
Eg
"
"
Ig
IL
"
"
Im
If
"
Em
Eg
a. Sebelum Gangguan
Gangguan
"
jXm
"
"
b.
Selama
Gambar (5.4) Hubungan singkat
generator
sinkron dengan beban motor sinkron
75
b). Dengan Teorema Thevenin
Arus hubung singkat simetris pada titik
hubung singkat,
If
"
Z th
Vf
Z th
jX
j X
Ze j X m
"
g
"
g
X m Ze
Arus hubung singkat generator;
I g"
j X m"
.I "f
"
"
j X g X m Ze
Arus hubung singkat motor,
I
"
m
j X g" Z e
j X X
"
g
"
m
Z
.I "f
e
Arus beban,
IL
SL
pu
Vf
Jadi arus total generator dan motor:
I g tot I g" I L
I m tot I m" I L
(5.14)
d). Dengan Menggunakan Tegangan Dalam
Sub Peralihan Generator dan Motor
Generator:
E g" V f I L j X g Z e
Motor:
E m" V f I L j X m"
76
Jadi arus total generator dan motor:
I g tot
E g"
j X g" Z e
Contoh 5.3.
Generator pada contoh 5.2. dibebani dengan
sebuah motor sinkron yang mempunyai rating
yang sama dengan generator. Reaktansi sub
peralihan motor X” = 0,2 pu. Mptpr itu menarik
daya sebesar 20 MW pada factor daya tertinggal
0,8 dan pada tegangan 12,6 kV. Hitunglah
besar arus seketika rms simetris, termasuk
arus beban dengan menggunakan teorema:
a). Teorema thevenin
b).Menggunakan tegangan dalam sub
peralihan
Jawab
a). Dengan teorema thevenin
I "f
Vf
Z th
j 0,2 0,1 j 0,2
Z th
j 0,12 pu
j 0,5
V f 0,97 0 0 pu
Jadi
0,97 0 0
I
j 8,0833 pu
0,12 90
"
f
Arus hubung singkat generator dan motor:
77
I g"
j X m"
.I "f
"
"
j X g Ze j X m
0,2
. j 8,0833 j 3,233 pu
0,5
0,3
I m"
. j 8,0833 j 4,850 pu
0,5
I L 0,859 36,87 0 pu
0,6872 j 0,5154 pu
Jadi arus total:
I g tot I g" I L
j 3,233 0,6870 j 0,5154
0,6872 j 3,7484 pu
I m (tot ) I m" I L
j 4,850 0,6872 j 0,5154
0,6872 j 5,3654
5,409 97,30 pu
e). Dengan Menggunakan Tegangan Dalam
Sub Peralihan
E g" V f I L j X g Z e
0,970 0 0,859 36,87 0.0,390 0
1,1433 10,39 0 pu
E "m V f I L j X m"
0,970 0 0,859 36,87 0 x 0,2 90 0
1,073 j 0,1374
1,0818 7,30 pu
78
Jadi
I g tot
E g"
jX g Z e
1,143310,39 0
0,390 0
3,811 79,610 pu
I m tot
E m"
jX m"
1,0818 7,30
0,290 0
5,409 97,30 pu
e. Perhitungan Arus Hubung Singkat
a). Dengan Tangan
Untuk menghitung arus hubung singkat
dengan tangan digunakan metode reduksi jalajala. Bila tegangan pada titik hubung singkat
sebelum
hubung
singkat
terjadi
tidak
diketahui, maka biasanya diambil sebesar 1 pu.
Pada perhitungan arus hubung singkat
biasanya arus beban diabaikan. Ini berarti
bahwa semua titik dalam sistem mempunyai
tegangan yang sama.
b). Komputer Digital
Dengan komputer digital banyak model
matematis yang dapat digunakan, anatara lain:
Model iterasi admitans rel
Metode impedans hubung singkat
79
c). Metode Admitans Rel
Metode ini sama dengan metode iterasi dalam
studi aliran beban, persamaan arus sebagai
berikut:
I 1 Y11 E1 Y12 E 2 Y13 E3 ............Y1n E n
I n Yn1 E1 Yn 2 E 2 Yn 3 E3 ...........Ynn E n
n
I k Ykn E n
n 1
n = jumlah simpul (rel)
Bila arus beban diabaikan semua tegangan dalam
sama, dengan demikian dapat diganti oleh satu
gambat tegangan. Tegangan pada rel yang
dihubung singkat adalah nol dan tegangan dalam
dihitung dari studi aliran beban , atau dimisalkan
sama dengan V f bila arus beban tidak diabaikan.
Jadi persamaan yang dibutuhkan hanya untuk
simpul-simpul dimana arus-arus yang masuk
jaringan nol, yaitu rel-rel dimana tegangan tidak
diketahui. Persamaan umum diatas dapat ditulis
sebagai berikut:
n
0 Ykk E k Ykn E n
n k
n 1
karena I k 0
Jadi diperoleh satu set persamaan yaitu untuk
rel-rel dimana tengangan tidak diketahui.
Mtode ini tidak praktis karena untuk
menghitung arus hubung singkat pada tiap rel
seluruh proses iterasi itu harus diabaikan.
80
a. Metode Impedans Hubung Singkat
Metode ini membutuhkan perhitungan matrik
impedas dari seluruh jaringan. Perhitungan ini
sangat panjang, bila ada perubahan pada
jaringan,
misalnya
penambahan
atau
pengurangan saluran dan penambahan atau
pengurangan
pembangkit,
tidak
perlu
membantuk matrik impedans itu elemen demi
elemen seperti pada pembentukan matrik asal.
Soal Latihan
1. Diketahui diagram segaris pada gambar 5.5
(a) dengan reaktansi-reaktansi dalam persen
pada dasar yang sama, sedangkan tahanantahanan diabaikan, bila terjadi hubung
singkat pada rel 4:
a. Hitung besar arus hubung singkat
simetris pada rel itu
b. Hitung aliran arus pada saluran-saluran
yang terhubung pada rel 4 itu
81
2
1
10%
20%
10%
10%
10%
10%
3
Gambar 5.5 (a) Diagram segaris sistem
BAB VI
82
STUDI KESTABILAN
PERALIHAN
Tujuan Umum:
Mahasiswa dapat memahami kestabilan dari
suatu sistem tenaga listrik
Tujuan Khusus:
Mahasiswa dapat mengenal kestabilan dan
ketidakstabilan pada sistem tenaga listrik
Mahasiswa dapat menentukan dan menghitung
daya keluaran generator pada keadaan mantap
(steady state)
Mahasiswa dapat menetukan persamaan ayunan
dan mempresentasikan dalam sistem
A. Pendahuluan
Kestabilan dari suatu sistem tenaga listrik adalah
kemampuan dari sistem itu untuk kembali bekerja
normal
setelah
mengalami
suatu
macam
gangguan. Sebaliknya, ketidakstabilan berarti
kehilangan kestabilan dalam sistem (loss of
synchronism).
Suatu sistem tiga fasa yang terdiri dari suatu
generator sinkron mencatu daya pada suatu motor
sinkron melalui saluran dengan reaktans XL,
seperti gambar berikut:
83
G
M
XG
XL
EG
XM
EM
Gambar 6.1. Sistem tenaga yang terdiri dari dua
mesin
I
EG E M
jX
dimana
X XG XM XL
misalkan
EM EM 00
EG EG
0
Daya keluar generator sama dengan daya masuk
motor karena tanahan-tahanan diabaikan.
P Re EG I *
EG E M
Re EG
X 90 0
EG E M
cos 90 0
X
EG E M
sin
X
84
Dalam keadaan mantap (steady state) daya
maksimum yang dapat disalurkan diperoleh bila
90 0 .
Pm
Nilai
EG
EG E M
X
Pm
dapat diperbesar bila salah satu
atau E M diperbesar, atau bila nilai reaktans XL
diperkecil (saluran parallel).
Bila penambahan beban itu dilakukan secara tibatiba dan cukup besar, motor itu kemungkinan
akan keluar dari keadaan sinkron walaupun beban
belum mencapai limit kestabilan manatap Pm.
Kestabilan ini dapat dijelaskan sebagai berikut;
Apabila penambahan beban motor dilakukan tibatiba dan cukup besar, daya keluar mekanis motor
akan jauh melampaui daya masuk elektris motor
dan kekurangan ini dicatu dengan berkurangnya
energi kinetis motor. Jadi motor berputar lebih
lambat susut daya bertambah besar dan daya
masuk motor juga bertambah.
Bila penambahan beban tiba-tiba itu melampaui
harga tertentu motor akan keluar dari keadaan
sinkron, tetapi bila penambahan tiba-tiba itu
masih dibawah harga tertentu, motor masih bias
kembali bekerja normal pada keadaan beban baru.
Harga tertentu tadi disebut limit kestabilan
(transients stability limit).
Sesuai dengan penjelasan diatas, persoalan
kestabilan pada sistem tenaga dibagi dalam tiga
bagian: kestabilan mantap (steady state stability),
kestabilan dinamik (dynamic stability), dan
kestabilan peralihan (transients stability).
85
Studi kestabilan mantap adalah studi yang
menentukan limit atas dari pembebanan mesin
sebelum mesin tersebut kehilangan keadaan
sinkron bila penambahan beban dilakukan secara
perlahan-lahan
(gradually).
Dalam
keadaan
sebenarnya gangguan-gangguan (disturbances)
pada sistem tenaga terjadi terus menerus karena
beban itu sendiri berubah terus menerus dan juga
karena perubahan perputaran turbin dan lain-lain.
Tetapi perubahan ini biasanya kecil sekali
sehingga tidak sampai menyebabkan sistem
kehilangan keserempakannya. Jadi dalam keadaan
ini sistem itu disebut secara dinamis (dynamically
stable). Tetapi bila gangguan-gangguan itu cukup
besar dan amplitudo osilasi besar dan bertahan
lama (redaman tidak ada atau sangat kecil) maka
kestaqbilan yang demikian akan menimbulkan
ancaman yang berbahaya bagi sistem dan akan
menimbulkan operasi yang sangat sulit. Studi
kestabilan dinamik ini biasanya harus dilakukan
dalam waktu 5 sampai 10 detik dan kadangkadang sampai 30 detik. Oleh karena itu waktu
studi cukup lama, pengaruh-pengaruh governor
dan pengatur tegangan otomatik (AVR) biasanya
harus diikutsertakan.
Dalam studi kestabilan peralihan waktu yang
dipandang hanya kira-kira 1 detik, dengan
demikian cukup singkat sehingga pengaruhpengaruh dari governor dan AVR biasanya
diabaikan, karena dalam waktu singkat tersebut
kedua peralatan tersebut masih dapat dianggap
belum bekerja.
Hubung singkat merupakan gangguan yang paling
berbahaya.
Selama
hubung
singkat,
daya
generator-generator yang dekat dengan gangguan
86
akan berkurang secara mendadak, sedangkan
daya generator yang jauh dari titik gangguan tidak
begitu terpengaruh. Apakah sistem tetap stabil
setelah terjadi gangguan tidak hanya tergantung
dari type gangguan, lokasi gangguan dan
kecepatan pengisolasian gangguan (fault clearing).
B. Representasi Sistem
Dalam studi kestabilan peralihan sering diambil
asumsi-asumsi sebagai berikut:
a. Generator sinkron dipresentasikan sebagai
reaktans (reaktans peralihan) terhubung seri
dengan tegangan konstan dibelakang reaktans
peralihan.
b. Torsi redaman diabaikan
c. Daya poros konstan
d. Momentum sudut (angular momentum) konstan
C. Persamaan Ayunan
Misalkan:
Ts torsi poros
Te
Ta
Ps
Pe
Pa
torsi elektromagnetik
torsi percepatan
daya poros
daya elektromagnetis
daya percepatan
2 f Ts
M = momentum sudut atau angular momentum
H = Konstanta inersia
energi tersimpan ( Mega joule)
daya no min al generator MVA
I = inersia
87
Energi tersimpan 1 I w 2 1 Mw
2
2
Momentum sudut M dan konstanta inersia H
dihubungkan dalam persamaan:
M
GH
150 f
Mega joule det ik
derajat
(6.1)
dimana G = daya nominal generator (MVA)
Ta Ts Te
Pa Ps Pe
Ta .w I w M
T II
d 2
dt 2
(6.2)
d 2
= perceptatan sudut
dt 2
Dalam
keadaan
seimbang
Ta 0 ,
tidak
ada
percepatan atau terjadinya perlambatan. Karena
berubah-rubah terus menerus seiring dengan
waktu, maka dan w diukur terhadap sumbu
stationer.
Misalkan:
w1 t
w1 t
dimana w1
kecepatan sudut sinkron
keadaan
normal.
Turunan
pertama
terhadap waktu
pada
dari
d d e
w1
dt dt
d 2 d 2
d t2 d t2
88
TI
d 2
d t2
d 2
d t2
Ta Ts Te
I
(6.3)
Pa Ps Pe
M
M
d 2
d t2
d
dt
2
(6.4)
persamaan (6.4) dinamakan persamaan ayunan
atau swing equation dan dinamakan sudut daya
atau power angle.
Pemecahan eksak dari persamaan ayunan diatas
sangat sulit bila ada beberapa mesin \, bahkan
bila P = 0 dan hanya ada 1 mesin berayun
terhadap rel yang sangat besar (infinite bus)
pemecahan persamaan itu harus menggunakan
integral eliptik. Pemecahan yang umum dipakai
dapat dibagi kedalam dua bagian. Golongan
pertama adalah metode klasik yang terdiri dari :
1. Kriteria sama luas atau equal area criterion
2. Pemecahan langkah demi langkah atau step
by step solution
Dengan kriteria sama-luas dapat diperoleh sudut
kritis, yaitu susdut terbesar yang diizinkan
sebelum gangguan diisolasi sehingga sitem tetap
stabil. Metode ini hanya dapat digunakan untuk
sistem yang terdiri dari 2 mesin.
89
Pemecahan
langkah-demi
langkah
dapat
digunakan untuk sistem yang terdiri dari banyak
mesin. Dengan metode ini diperoleh hubungan
antara sudut daya () dan waktu (t).
Golongan kedua adalah metode modern dengan
menggunakan komputer. Metode-metode ini diberi
nama sesuai dengan model matematiknya dan
yang umum digunakan adalah :
1. Metode Euler
2. Metode Runge-Kutta
3. Metode Liapunov
Dalam buku ini hanya dibicarakan metode
golongan pertama.
D. Satu Mesin Berayun Terhadap Rel Besar
(Infinite Bus)
Satu rel besar (infinite Bus) mempresentasikan
suatu istem yang sangat besar di mana frekuensi
dan tegangan konstan. Atau dapat juga disebutkan
sebagai suatu mesin dengan konstanta inersia H
yang tak terhingga. Pada persamaan ayunan (6.4)
dinayatakan bahwa,
m
d 2δ
pa
dt 2
Kalikan ruas kiri dan ruas kanan dengan
maka diperoleh
2 dδ
M dt
d 2δ dδ 2 dδ
2 2
pa
dt
dt m dt
atau
Pa
dδ 2
) 2 dδ
M
dt
d (
90
maka
(
dδ
dt
)2
2
2
Pa dδ
M 0
dan
(
dδ
2
) w'
Pa dδ
2
dt
M 0
(6.5)
dimana,
δ o = sudut daya sesaat sebelum gangguan
w’ = perubahan kecepatan sudut terhadap
kecepatan sinkron.
Bila mesin itu tetap stabil terhadap rel besar
setelah terjadi gangguan dan.setelah keadaan
stasioner tercapai maka :
δ
δφ
2
Pa dδ 0
M
atau
δ
δφ
2
(Ps Pm sin δ) dδ 0
M
Jadi syarat kestabilan adalah :
δ
Pa dδ 0
(6.6)
δφ
m = sudut akhir.
Pe
Pa
As1
Ps
91
A1 = Energi
Percepatan
A2 = Energi
Perlambatan
Gambar. (6.2) Lengkung daya terhadap sudut daya
Integral diatas dapat di artikan sebagai daerah
dibawah lengkung pa terhadap dengan 0 dan m
sebagai batas-batasnya, atau karena pa = ps – pe
dapat juga diartikan sebagai daerah antara ps dan
dan antara pe dan Gambar (6.3) . Sehingga
δ
δ
P
s
d δ
0
φ
Maka
A1 + A2 = 0 atau A1 = - A2
inilah asal- usul dari nama kriteria sama luas
untuk kestabilan.
Pe
P
Ps
As1
A1 = Energi
Percepatan
A2 = Energi
Perlambatan
0
m
Gambar (6.3)Lengkung
daya terhadap sudut
daya.
E. Dua Mesin Yang terbatas Besarnya
Suatu sistem yang terdiri dari dua mesin selalu
dapat diganti dengan satu mesin ekivalen dan satu
rel besar. Persamaan ayunan untuk kedua mesin
tersebut :
92
d 2δ1 Pa 1 Ps 1 Pe 1
dt 2
M1
M1
dan
d 2δ 2 Pa 2 Ps 2 Pe 2
dt 2
M2
M2
(6.7)
Perbedaan sudut antara kadua mesin,
1 = 1- 2
jadi,
d 2δ
dt 2
d 2 1 d 2 2 Ps 1 Ps 2
2
dt 2
dt M1 M 2
atau
2
M 2 M 1 d δ d 2 1 M 2 Pa1 M 1 Pa 2
M 1 M 2 dt 2 dt 2
M1 M 2
2
M 2 M 1 d δ d 2 1 M 2 Pa1 M 1 Pa 2 M 2 Pel M 1 Pea 2
M 1 M 2 dt 2 dt 2
M1 M 2
M1 M 2
atau
M
d 2δ
dt 2
Pa Ps Pe
dimana :
M
M 2M1
M1 M 2
M 2 Ps1 H 1 Pe 2
M1 M 2
M 2 Ps1 H 1 Pe 2
Pe =
M1 M 2
Ps =
(6.8)
93
F. Persamaan Daya –
dengan n Generator
E1
I2
1
2
En
Suatu
Sistem
s
s
s
E2
I1
Sudut
In
n
jaringan
Gambar (6.4) Skematis dari suatu sistem
dengan n generator
E1,
E2,….En
terletak
dibelakang
reaktansi
peralihan reaktansi peralihan X1, X2, X3,………Xn.
Dari generator-generator sudah termasuk dengan
jaringan itu.
Daya yang diberikan oleh tiap generator :
S1 = P1 + j Q1 = E1 I1*
S2 = P2 + j Q2 = E2 I2*
……………………….
Sn = Pn + j Qn = En In*
(6.9)
Arus yang diberikan oleh tiap generator :
I1 = Y11 E1 + Y12 E2 +………….+ Y1n En
I2. = Y21 E1 + Y2.2 E2 +………….+ Y2n En
……………………………………………
In. = Yn1 E1 + Yn.2 E2 +………….+ Ynn En (6.10)
Jadi ,
P1 + JQ1 = E1Y11* E 1* + E1Y12 E2 + E2* +…………..+
E1Y 1n* En*
n
P1 + JQ1 = E1 Y1k* E k*
(6.11)
k 1
94
Rumus umum :
n
Pn + JQn = En Y1k* E k*(n = 1,….., n)
k 1
(6.12)
Untuk perhitungan kestabilan kita perlukan harga
skalar yang mengandung sudut pergepseran mesin
. Misalkan :
E1 = E 1 / 1 ; E1* = E 1 / 1
E2 = E 2 / 2 ; E2* = E 2 / 2
En = E n
/ n ; En* = E n / n
Y11 = Y11 / 11 ; Y11* = Y11 / 11
Y12 = Y12 / n ; Y12* = Y12 / θ11
Yik = Yik
/ θ ik
P1 + Q1 = E 1
2
…….………………………………..
; Yik* = Yik / θ i k
Y11 / θ11 + E 1 E 2 Y12 / δ1 δ 2 θ12
+…………….+ E 1
E n Yi n / 1 n θ12
n
F1 + JQ1 = E 1 E k Yik / 1 k θ ik
m 1
Rumus umum :
n
Pn + JQn = E n E k Ynk / n k θ nk
k `1
(6.13)
Dengan mengingat,
= cos + J sin
= cos - sin
maka,
95
P1 = E 1
2
Y11 cos 11+ E 1 E 2 Y12 cos (1-2-12)
+ …….+ F1 E n Y11 cos (1-n-1n)
P2 = E 2 E 1 Y21 cos (2-1-21) + E 2
2
Y22 cos 22
+ …….+ E 2 E n Y2 n cos (n-k-nk)
Rumus umum :
n
Pn = E n E k Yn k cos (n-k-nk)
k 1
Jadi persamaan daya sudut untuk 2 mesin :
Pe1 = E 1 2 Y11 cos 11 + E 1 E 2 Y12 cos (1-2-12)
Pe2 = E 1 E 2 Y12 cos (2-1-21) + E 2
2
Y22 cos 22
bila mesin 2 merupakan rel besar :
02 = 0
1 =
Pe1 = E 1
2
Y11 cos 11 + E 1 E 2 Y12 cos (-12)
Pe1 = Po +Pm sin (-); (= 12- 90o)
(6.14)
Jadi pada umumnya lengkung daya sudut itu
merupakan gfungsi yang digeserkan ke atas.
Gambar (6.5).
P
PM
Pc
0
90
012
012
Gambar (6.5) Lengkung daya – sudut yang
tergeser
96
Bila jala-jala itu aterdiri dari reaktansi yang
induktif saja :
11 = -90o
12 = -90o
= 12 – 90o - = 90o - 90o = 0o
maka,
Pe = E 1 2 Y11 cos 11= 0
Jadi rumus atas menjadi :
Pe1 = Pm sin
G. Lengkung Daya – Sudut Ekivalen dari Dua
Mesin
Pc1 = E 1 2 Y11 cos 11+ E 1 2 Y2 Y12 cos (1-2-12)
Pc2 = Y2
E 1 Y22 cos (2-1-21) + Y2
2
Y22 cos 22
Substitusi harga Pe1 dan Pe2 dalam persamaan (6.8)
Pe =
M 2 Pe1 M 1 Pe 2
M1 M 2
M 2 E 1 Y11 cosθ11 M 1 E 2 Y22 cosθ 22
2
Pe =
2
M1 M 2
E 1 E 2 Y12 {M 2 cos(δ M 12 ) M 1 (δ θ12 )
M1 M 2
(6.15)
dimana = 1 - 2
Bila jala-jala itu terdiri dari hanya reaktansi yang
induktif
11 = 22 -90o
97
12 = 90o
Pe =
E 1 E 2 Y12 {M 2 sin(0 δ θ M 1 sin δ)
M1 M 2
E 1 E 2 Y12 {M 2 sinδ M 12 M 1 sin )
M1 M 2
Pe = E1 E 2 Y12
M 1 M 2 sin
M1 M 2
Pe = E1 E 2 Y12 sin
(6.16)
Dengan : = 1 - 2
Jadi bila jala-jala itu hanya aterdiri dari reaktansi,
persamaan daya sudut dari dua mesin yang
terbatas
besarnya
tidak
atergantung
dari
konstanta inersia mesin-mesin itu.
H. Pemakaian Kriteria Sama-Luas untuk
Kestabilan
1. Saluran Terbuka Pada Gambar (6.5)
diberikan gambar segaris dan gambar
impedansi dari suatu sistem yang terdiri
dari dua generator.
98
Rel Besar
(Infinite bus)
Gambar (6.5) Sistem yang terdiri dari dua
generator
Bila pada kerja normal salah satu saluran
terbuka maka ada kemungkinan generator
itu keluar dari keadaan sinkron
Gambar (6.6) Satu saluran terbuka
Dengan pembukaan salah satu kawat
berarti memperbesar impedensi transfer
antara faktor dan rel besar. Jadi bila X
diperbesar harus diperbesar bila, daya
yang ditransmisikan tetap besarnya. Ini
dapat dilihat pada persamaan.
99
P=
E1 E 2
X 12
sinδ
Jadi r1, r2 dapat dinyatakan sebagai :
r1=
X 12 (sebelum gangguan)
X 12 (selama gangguan)
r2=
X 12 (sebelum gangguan)
X 12 (sesudah gangguan)
Untuk menentukan waktu kerja (setting)
rele perlu diketahui waktu atau sudut daya
di mana rele itu selambat-lambatnya harus
sudah bekerja supaya sistem itu tetap
stabil dinamakan sudut penentuan kritis,
. Untuk maencari c digunakan kriteria
sama luas.
P
Pe
Pe
Ps
0
0
Gambar (6.7) Lengkung-lengkung daya-sudut
sebelum dan setelah satu saluran terbuka
Syarat supaya sistem tetap stabil adalah :
A1 Ag
100
Atau energi percepatan A1 harus lebih kecil
atau sama dengan energi perlambatan Ag,
dan untuk maemperoleh sudut pemutusan
kritis harus memenuhi syarat :
A1 = A g
Jadi
Ps ( o - 0)
r1 Pm sin d
o
= r2 Pm sin d - Ps (m-o)
o
dan
(m-o) Ps - r2 Pm (cos c – cos m)
r1 Pm (cos 0 – cos c) = 0
tetapi,
Ps = Pm sin o
Maka
(m-o) sin 0 = (r2 – r1) cos c + r1 cos 0)
r2 cos m
atau
(δ m δ 0 sin δ 0 r1 cos δ 0 r2cos δ m
r2 r1
(6.17)
cos c =
dimana, sin 0 =
Ps
Pm
101
sin m =
Ps
dan m > 90o
r2 Pm
m = - sin
–1
(
Ps
)
r2 Pm
catatan : m , o dalam tanda kurung
persamaan (6.17) harus dalam radian.
Dengana kriteria sama-luas diperoleh
hanya sudut daya, sedang waktu tidak
diperoleh. Untuk memperoleh waktu t,
dipakai pemecahan langkah-demi-langkah.
Soal Latihan 6.1
Pada gambar dibawah ini, diberikan impedans
dalam persaatuan pada dasar yang sama
dengan
mengabaikan
nilai
resistans.
Generator A memberikan daya sebesar 1 pu
kepada rel besar B. Misalkan tegangan
dibelakang reaktans peralihan generator A
1,25 pu dan rel besar B 1,0 pu. Pada titik P
terjadi hubung singkat tiga fasa dan kedua
pemutus daya yang ada pada ujung kawat
terganggu,
dianggap
membuka
secara
simultan. Tentukan besar sudut daya kritis c.
102
J 0,16
J 0,24
J 0,16
J 0,16
J 0,28
A
B
H=3
E A = 1,25
H=
P
J 0,16
J 0,24
J 0,16
E B = 1,0
Rel Besar
Gambar (6.8). Diagram reaktasi untuk contoh soal
6.1
BAB VII
PENGATURAN DAYA DAN
FREKUENSI DALAM SISTEM
TENAGA LISTRIK
Tujuan Umum:
103
Mahasiswa dapat memahami pengaturan daya
dan frekuensi pada sistem tenaga listrik
Tujuan Khusus:
Mahasiswa dapat menghitung daya frekuensi
pada sistem tenaga listrik
Mahasiswa dapat menentukan dan menghitung
arus hubung singkat.
Mahasiswa dapat memahami konsep pengaturan
kecepatan
Mahasiswa dapat menetukan karakteristik beban
dan penyimpanan energi
A. Pendahuluan
Daya dan frekuensi pada sistem tenaga listrik
sangat erat hubungannya satu sama lain. Bila
dimisalkan bahwa semua alat-alat pengatur dari
penggerak mula yag menggerakkan generator
ditahan tetap pada posisinya, jadi tidak bekerja,
maka bila ada perubahan beban frekwensi juga
akan berubah. Misalnya, bhila beban bertambah
dan semua alat-alat pengatur daya dari penggerak
mua tidak bekerja, maka mesin itu akan
diperlambat sampai terjadi karena penurunan
frekwensi dan penurunan tegangan. Perlambatan
mesin akan terus berlangsung sampai dicapai
keseimbangan yang baru yaitu bila beban yang
tinggal sama dengan daya mesin.
Operasi yang demikian jelas sangat buruk dan
tidak bisa diterima. Oleh karena itu tiap-tiap
pergerakan mula selalu dilengkapi dengan
pengatur daya dan frekuensi. Jadi bila pengatur
daya ini akan bekerja sehingga memperoleh
keseimbangan antara daya mesin dan beban.
104
Jadi tuuan dari pengaturan daya frekwensi dalam
sistem tenaga adalah menjaga frekwensi yang
konstan bila ada perubahan beban.
Untuk menjaga frekwensi konstan dlakukan
dengan
mengatur
pembukaan
katup-katup
pengatur (control valves) bahan bakar (atau air
untuk turbin) dari penggerak mua. Semua
penggerak mua : diesel, turbin-turbin uap, gas,
dan air selalu dilengkapi dengan pengatur
perputaran (speed governor. Governor inilah alat
utama untuk mengatur daya dan frekuensi.
Daya watt disamping tergantung pada frekuensi
juga tergantung pada ategangan, tetapi pengaruh
dari yang terakhir ini kecil. Aterutama untuk
sistem tegangan tinggi. Untuk sistem transmisi
tegangan tinggi tahanan R jauh lebih kecil dari
rekasi X sehingga sudutnya mendekati 900.
Dengan demikian persaman daya watt dan daya
VAR dapat ditulis sebagai :
P=
V1 V2
X
V1 V2
Q=
X
sin
V2
cos
X
2
(7.1)
Karena pada umumnya nilai sudut kecil, maka
Sin
(7.2)
Cos
Jadi [ersamaan (7.1) dapat ditulis,
P=
V1 V2
Q=
Atau
X
(7.3)
V1 V2
V2
X
X
2
105
Q=
Atau
Q=
V2
X
V2
X
( V1 V2 )
V
(7.4)
Dari persamaan (7.3) dapat dilihat bahwa aliran
daya aktif (watt) hanya tergantung dari selisih
sudutdaua
selama
ategangan-tegangan
dipertahankan konstan, dan aliran daya reaktif
(var) hanya atergantung dari selisih ategangan V.
oleh karena itu kedua persoalan ini secara
perdekatan dapat dibahan terpisah.
B. Daya konsepsi Dasar Mekanisme Pengatur
Kecepatan.
Sistem governor yang sederhana pada turbinturbin uap alat-alat usaha dari governor itu adalah
:
a. pengatur kecepatan g
b. katup bantu (pi) …………..
c. Servemeta
d. Batang I
e. Katup utama V
Misalkan membukaan katup utama atau katup
kontrol x2 dan kedudukan katup bantu x1. dalam
keadaan seimbang dan tanpa beban. Katup bantu
v tertutup sama sekali. Dan katup utama juga
hampir tertutup, jadi x1 = dan
x2 = .
Jika
beban
bertambah,
perputaran
akan
berkurang dan akan mengubah letak titik ke
bawah bersama-sama denga titik 1. hal ini akan
membuka katup bantu V da minyak dengan
106
tekanan tingi akan masuk di bawah piston
servomotor . Katup utama akan terangkat da uap
atau air akan lebih banyak masuk turbin sehingga
perputaran akan naik.
Jika titik 2 tetap dana tidak dihubungkan dengan
katup utama V (Viston), katup ini akan menutup
hanya pada satu posisi dari titik . Jadi hanya
pada satu perputaran atertentu. Jadi dalam hal ini
perputaran akan atetap kembali ke n setiap ada
[perubahan beban turbin. Hal ii aterjadi karena
katup v akantetap terbuka setelah perubahan
beban sampai katup utama mengembalikan titik
.
Kepada
kedudukan
semula,
yaitu
dengan
kembalinya perputaran pada harga ng. kejadian ini
akan
menghasilkan
karakteristik
beban
perputaran yangdisebut “Imnecronous”. Seperti
karakteristik 1 pada gambar 7.2.
Sebaliknya bila titik 2 diperoleh dengan piston
utama, seperti pada gambar turbin. Pada saatu
posisi dari titik yagberada di bawah posisi yang
menhagsilkan perputaran n. oleh karena itu,
keadaan seimbang akan dipulihkan setelah
penambahan beban turbin pada perputaran yang
loebih rendah dari perlutaran beban nol n.
meskipun demikian akan mempunyai karakteristik
menurun (drooping characteristic). Daya yang
diberika turbin, secara pendekatan adalah
perbadingan lurus dengan pembukaan x2 dari
katup utama V. jadi :
P=
Pr
x2
dv
(7.5)
107
dv = pembukaan katup utama ketika daya turbin
sama dengan P, yaitu daya nominal turbin. Posisi
x sebanding dengan bahan kedepatan atau
rekwensi, jadi:
X = k (ng – N ) = k (w - w)
(7.6)
K dan k adalah konstanta-konstanta. Dalam
keadaan mantap dengan katup bantu tertutup
hubungan x dan x2 adalah sebagai barikut :
1
x
c
=
x2
12
c = konstanta
maka,
N = N - N =
c.d v .P
k .pr
persamaan terakhir ini adalah persamaan untuk
kurva 2 pada gambar 7.2 pangaturan kecepatan
keadaan mantap atau “steady state sopeed doop”
didefinisikan sebagai :
R=
N N c.d v .P
Nr
Nr .k .pr
Dua
macam
pengaturan
karakterisktik
pembangkitan yaitu :
1. “Droop”R, dapat diatur dengan mengubah c
yaitu perbandingan panjang bagian-bagian
pembangkit sehingga kurva perubah, misalnya
kurva 2 berubah menjadi kurva 2, pada
gambar 7.2 ini jarang dilakukan dan hanya
dapat dilakukan bila mesin telah dingin.
2. Kecepatan tak berbeban. N, dapat diatur
dengan mengubah ketegangan pegas S. maka
108
karakteristik dapat digeser sejajar, misalnya
kurva 2 berubah menjadai 2 pada gambar 7.2
Pers. (5.5)
dan 7.6) tidak 100% benar,
karena karakteristik mesin yang sesungguhnya
tidaklah lesulur kurva 2 pada gambar Turbinturbin hidrolik yang mempunyai karakteristik
seperti kurva 4 pada gambar 7.2 dan turbin uap
yang
mempunyai
banyak
katup
kontrol
mempunyai karakteristik dari kurva 3 ini
menunjukkan satu katup kontrol. Kurva dapat
dibuat lebih halus dengan membuka katup
sedemikian rupa sehingga terjadi tumpang tindih
(over Lapping).
C. Karakteristik Daya – Frekuensi
1. Karakteristik pembangkitan kg
Karakteristik pembangkitan untuk satu mesin
biasanya dinyatakan daam % kapasitas pe 0,1
Hz atau dalar MW per 0,1 Hz. Karakteristik
pembangkitan suatu daerah dapat ditentukan
dengan
menjumlahkan
karakteristikkarakteristik pembangkitan mesin-meisn di
daerah itu.
Misal : Karakteristik pembangkitan mesin ke –
1 = kg1
Karakteristik Pembangkitan mesin ke – 2 = kg2
Karakteristik Pembangkitan mesin ke – 2 = kgn
Maka karakateristik pembangkitan daerah itu,
makin banyak mesin-mesin dalam daerah itu,
karakteristik pembangkitan daerah itu makin
linear .
Umumnya
karakteristik
pembangkitan
suatudaerah
diperoleh
tidak
dengan
menjumlahkan masing-masing mesin. Seperti
di tas, melainkan percobaan ‘tripping test”,
109
biasanya karakteristik pembangkitan berada
dalam jalur 1 s/d 3,5% kapasitas per 0,1 Hz.
2. Karakteristik beban. KL
Umumnya bila frekuensi turun beban efektif
akan turun dan sebaliknya bila frekuensi naik
beban efektif akan naik. Untuk mengetahui
karakteristik beban bantu daerah, biasanya
dilakukan tripping test sebab beban suatu
daerah sukar sekali diketahui susunannya.
Dari
percobaan-percobaan
ternyata
karakteristik beban adalah linear aterhadap
frekuensi, dan seperti karakteristik pembangkit
dinyatakan dalam KW per 0,1 Hz, dan diberi
notasi KL
3. Karakteristik Gabungan
Karakteristik gabungan adalah gabungan
antara
karakteristik
pembangkit
dengan
karakteristik beban merupakan pengurangan
secara
aljabar,
biasa
disebut
sebagai
karakteristik
“frequency-frequency”
ditulis
sebagai :
K = KG - KL
Bila
frekuensi
turun,
maka
pembangkitanbertambah
sedang
beban
berkurang, maka ada kelebihan daya. Jadi
karakteristik gabungan ini menyatakan besar
kale bihan daya bila frekuensi turun. Atau
menytakan besar kekurangan daya bial
frekuensi naik.
Dengan diketahuinya karakterisik gabungan
ini
maka
dapat
ditentukan
besarnya
penambahan/pengurangan pembangkitan yang
diperlukanuntuk mengembalikan frekuensi ke
110
harga nominalnya bila terjadi penyimangan
frekuensi seperti terlihat pada gambar (7.1)
G
f
L
G
C
I0
L
fo
G
f1
I1
L
Go
L
G1
C
G
GL
Gambar (7.1) Penyimpanan energi
GG
= Karakteristik pembangkitan mulamula
LL
= Karakteristik beban mula-mula.
CC
= Karakteristik gabungan
L’L’
= Karakteristik beban sesudah ada
embahasan beban
C’C’
=
Karakteristik
pembangkitan
sesudah ada pengaturan
adanya
penambahan
beban
yang
diakomodokan oleh pebangkit-pembangkitnya.
Pada keadaan mula-mula frekuensi adalah
minimal = f0 sekarang beban betambah
sehingga karakteristik beban bereser menjadi
L.L dan frekuensi turun menjadi f1.
Ke3seimbanganbeban di titik fg, maka frekuensi
kembali
nominal.
Besar
penambahan
pembagkitan adalah G1. G0.
Dengan memakai karakteristik gabungan CC,
kita dapat maenentukan beban penambahan
pembangkitan yang eiperlukan (G1 - Gn0 untuk
mengembalikan
frekwensi
ke
keadaan
nominalnya bila terjadi enyimpangan frekuensi
sebesar (f1 – f0), dan dapat dirumuskan sebagai
berikut :
111
G1 = G0 = K (f1 – f0)
Bila G dalam MW, K dakan MW/0, 1Hz, f dalam
Hz, maka :
G1 = G0 = K (f1 – f0). 10
(7.7)
4. Tahap-tahap yang terjadi bila ada Perubahan
beban
1). Persamaan Energi Tersimpan
Perubahan bebanmual-mula akan dilayani oleh
sebagian energi kinetik yang dimiliki mesinmesin. Misalnya suatu kinetik mesin-mesin
sehingga kecepatannya turun, jadi frekwensi
turun.
Energi kinetik mesin-mesin sebanding dengan
kuadrat frekuensinya sehingga dapat dituliskan
:
E1 = (
f1 2
) . E0.
f0
(7.8)
E1 = energi kinetik pada frekuensi f1
E0 = energi kinetik pada frekuensi f0
Untuk suatu penambah frekuensi yangkecil f,
perubahan energi kinetik adalah sebagaiberikut
:
X = E1 – E0
E = (
f1 2
) . E0-f0 = E0
f0
f1 2
2 1
f 0
karena f kecil maka persamaan menjadi :
E = 2 - f
(E0/f0)
atau
f =
E
2
f0
E0
(7.9)
Energi kinetik mesin-mesin pada frekuensi
nominal adalah sama dengankapasaitas mesin-
112
mesin membalikkan dengan konstanta inersia
ini
= 2 s/d G KWd/KVA untuk unit-unit hidro.
= 5 s/d KWd/KVA untuk unit-unit uap.
Dimana KWD = Kilo-watt-detik
Contoh 7.1
Misalkan konstanta inersi gabungan suatu sistem
0 KWd/KVA, maka energi kinetik pada frekuensi
nominal untuk kapasitas daerah sebesar 5.000
KVA adalah :
E0 = 0.000 KVA x 6 KWd/KVA = 30.000 KWD.
Bila pada keadaan ini terjadi penambahan beban
tiba-tiba sebesar 25 MW yangdapat diatasi dengan
mengambil sebagian :
E – 25 MW x M dt = 100 KWd
E 2 f E 0 / Fq
Energi kinetik harus dinaikkan sebesar 150 MWd
sebesar
gangguan.
Untuk
mengembalikan
frekuensi ke harga nominalnya.
2).Pengaturan
Alamiah
Atsu
(Natural
Regulations)
Kenaikan beban mula-mula dilayani dengan
mengambil sebagian energi kinetik mesinmesin sehingga frekuensi turun.
Dengan turunya frekuensi maka sebelum
engaturan kecepatan unit-unit pembangkit
bekerja walaupun dengan frekuensi yang lebih
.Beban nominal, yaitu = f1 pada pada saat ini
terjadi keseimbangan di titik I1. pengaturan ini
disebut pengaturan alamiah atau ‘natural
regulation”.
113
3).PengaturanSuplementer (Supplementary
Regulation)
Untuk mengembalikan frekuensi ke harga
niminalnya, karakteristik pembangkitan pada
Gbr. 7.3 perlu digeser menjadi G’G’ sehingga
dicapai titik keseimbangan harga pada titik I2
pada mada frekuensi nominal diperoleh.
Penggeseran ini dilakukan dengan menggeser
titik 0.
114
115