- Politeknik Negeri Sriwijaya
advertisement

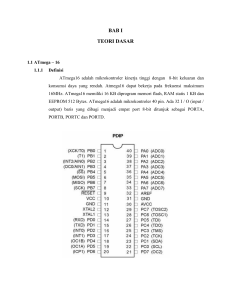
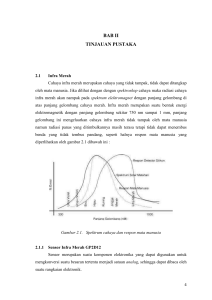
BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler AVR ATmega8 Mikrokontroler adalah sebuah computer kecil (“special purpose computers”) di dalam satu IC yang berisi CPU, memori, timer, saluran komunikasi serial dan parallel, Port input/output, ADC. Mikrokontroler digunakan untuk suatu tugas dan menjalankan suau program (Andrianto.2013). Pada saat ini penggunaan mikrokontroler dapat kita temui pada berbagai peralatan, misalnya peralatan yang terdapat di rumah, seperti telpon digital, microwave oven, televisi, mesin cuci, sistem keamanan rumah, PDA, dan lain-lain. Mikrokontroler dapat kita gunakan untuk berbagai plikasi misalnya untuk pengendalian, otomasi industri, akuisisi data, telekomunikasi dan lain-lain. Saat ini keluarga mikrokontroler yang ada di pasaran yaitu Intel 8048 dan 8051(MCS51), Motorola 68HC11, Microchip PIC, Hitachi H8, dan Atmel AVR (Andrianto.2013). AVR ATmega8 adalah mikrokontroler CMOS 8-bit berarsitektur AVR RISC yang memiliki 8K byte in-System Programmable Flash. Mikrokontroler dengan konsumsi daya rendah ini mampu mengeksekusi instruksi dengan kecepatan maksimum 16MIPS pada frekuensi 16MHz. Jika dibandingkan dengan ATmega8L perbedaannya hanya terletak pada besarnya tegangan yang diperlukan untuk bekerja. Untuk ATmega8 tipe L, mikrokontroler ini dapat bekerja dengan tegangan antara 2,7 - 5,5 V sedangkan untuk ATmega8 hanya dapat bekerja pada tegangan antara 4,5 – 5,5 V (http://elib.unikom.ac.id/files/disk1/535/jbptunikompp-gdl-indrapurna-267115-unikom_i-i.pdf). ATmega8 adalah low power mikrokontroler 8 bit dengan arsitektur RISC. Mikrokontroler ini dapat mengeksekusi perintah dalam satu periode clock untuk setiap instruksi. Berikut ini adalah contoh gambar ATmega8 yang terdapat pada gambar di bawah ini. 5 6 Gambar 2.1. Mikrokontroler ATmega8 (http://digilib.its.ac.id/public/ITS-Nondegree-14534-paperpdfpdf.pdf) Mikrokontroler ini diproduksi oleh atmel dari seri AVR. Untuk seri AVR ini banyak jenisnya, yaitu ATmega8, ATmega8535, Mega8515, Mega16, dan lain-lain. Beberapa fitur dari ATmega8 adalah sebagai berikut : 1. 8 Kbyte Flash Program 2. 12 Kbyte EEPROM 3. 1 Kbyte SRAM 4. 2 timer 8 bit dan 1 timer 16 bit 5. Analog to digital converter 6. USART 7. Analog comparator 8. Two wire interface (I2C) (http://digilib.its.ac.id/public/ITS-Nondegree-14534paperpdfpdf.pdf). 7 2.1.1 Konfigurasi Pin ATmega8 Gambar 2.2. Konfigurasi Pin ATmega8 (http://www.atmel.com/images/atmel-2486-8-bit-avr-microcontroller atmega8_l_datasheet.pdf) ATmega8 memiliki 28 Pin, yang masing-masing pinnya memiliki fungsi yang berbeda-beda baik sebagai port maupun fungsi yang lainnya. Berikut akan dijelaskan fungsi dari masing-masing kaki ATmega8 yaitu sebagai berikut : 1. VCC Merupakan supply tegangan digital. 2. GND Merupakan ground untuk semua komponen yang membutuhkan grounding. 3. Port B (PB7...PB0) Didalam Port B terdapat XTAL1, XTAL2, TOSC1, TOSC2. Jumlah Port B adalah 8 buah pin, mulai dari pin B.0 sampai dengan B.7. Tiap pin dapat digunakan sebagai input maupun output. Port B merupakan sebuah 8-bit bi-directional I/O dengan internal pull-up resistor. Sebagai input, pin-pin yang terdapat pada port B yang secara eksternal diturunkan, maka akan mengeluarkan arus jika pull-up resistor diaktifkan. Khusus PB6 dapat digunakan sebagai input Kristal (inverting 8 oscillator amplifier) dan input ke rangkaian clock internal, bergantung pada pengaturan Fuse bit yang digunakan untuk memilih sumber clock. Sedangkan untuk PB7 dapat digunakan sebagai output Kristal (output oscillator amplifier) bergantung pada pengaturan Fuse bit yang digunakan untuk memilih sumber clock. Jika sumber clock yang dipilih dari oscillator internal, PB7 dan PB6 dapat digunakan sebagai I/O atau jika menggunakan Asyncronous Timer/Counter2 maka PB6 dan PB7 (TOSC2 dan TOSC1) digunakan untuk saluran input timer. 4. Port C (PC5…PC0) Port C merupakan sebuah 7-bit bi-directional I/O port yang di dalam masingmasing pin terdapat pull-up resistor. Jumlah pin nya hanya 7 buah mulai dari pin C.0 sampai dengan pin C.6. Sebagai keluaran/output port C memiliki karakteristik yang sama dalam hal menyerap arus (sink) ataupun mengeluarkan arus (source). 5. RESET/PC6 Jika RSTDISBL Fuse diprogram, maka PC6 akan berfungsi sebagai pin I/O. Pin ini memiliki karakteristik yang berbeda dengan pin-pin yang terdapat pada port C lainnya. Namun jika RSTDISBL Fuse tidak diprogram, maka pin ini akan berfungsi sebagai input reset. Dan jika level tegangan yang masuk ke pin ini rendah dan pulsa yang ada lebih pendek dari pulsa minimum, maka akan menghasilkan suatu kondisi reset meskipun clock-nya tidak bekerja. 6. Port D (PD7…PD0) Port D merupakan 8-bit bi-directional I/O dengan internal pull-up resistor. Fungsi dari port ini sama dengan port-port yang lain. Hanya saja pada port ini tidak terdapat kegunaan-kegunaan yang lain. Pada port ini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut dengan I/O. 7. AVcc Pin ini berfungsi sebagai supply tegangan untuk ADC. Untuk pin ini harus dihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk analog saja. Bahkan jika ADC pada AVR tidak digunakan tetap saja disarankan untuk 9 menghubungkannya secara terpisah dengan VCC. Jika ADC digunakan, maka AVcc harus dihubungkan ke VCC melalui low pass filter. 8. AREF Merupakan pin referensi jika menggunakan ADC (http://elib.unikom.ac.id/files/ disk1/535/jbptunikompp-gdl-indrapurna-26711-5-unikom_i-i.pdf). Pada gambar 2.3 di bawah ini dapat dilihat blok diagram dari IC mikrokontroler ATMega8. 10 Gambar 2.3. Blok Diagram ATmega8 (http://www.atmel.com/images/atmel-2486-8-bit-avr-microcontroller atmega8_l_datasheet.pdf) 11 Pada AVR status register mengandung beberapa informasi mengenai hasil dari kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini digunakan untuk altering arus program sebagai kegunaan untuk meningkatkan performa pengoperasian. Register ini di-update setelah operasi ALU (Arithmetic Logic Unit) hal tersebut seperti yang tertulis dalam datasheet khususnya pada bagian Instruction Set Reference. Dalam hal ini untuk beberapa kasus dapat membuang penggunaan kebutuhan instruksi perbandingan yang telah didedikasikan serta dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dan singkat. Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal tersebut harus dilakukan melalui software. Berikut adalah gambar status register. Gambar 2.4. Status Register ATmega8 (http://elib.unikom.ac.id/files/disk1/535/jbptunikompp-gdl-indrapurna-26711-5unikom_i-i.pdf) 1. Bit 7(I) Merupakan bit Global Interrupt Enable. Bit ini harus di-set agar semua perintah interupsi dapat dijalankan. Untuk perintah interupsi individual akan di jelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik yang individual maupun yang secara umum akan di abaikan. Bit ini akan dibersihkan atau cleared oleh hardware setelah sebuah interup dijalankan dan akan di-set kembali oleh perintah RETI. Bit ini juga dapat diset dan di-reset melalui aplikasi dan intruksi SEI dan CLL. 12 2. Bit 6(T) Merupakan bit Copy Storage. Instruksi bit Copy Instructions BLD (Bit Load) and BST (Bit Store) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah dioperasikan. Sebuah bit dari sebuah register dalam Register File dapat disalin ke dalam bit ini dengan menggunakan instruksi BST, dan sebuah bit di dalam bit ini dapat disalin ke dalam bit di dalam register pada Register File dengan menggunakan perintah BLD. 3. Bit 5(H) Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatika BCD. 4. Bit 4(S) Merupakan Sign bit. Bit ini selalu merupakan sebuah ekslusif di antara Negative Flag (N) dan two’s Complement Overflow Flag (V). 5. Bit 3(V) Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen. 6. Bit 2(N) Merupakan bit Negative Flag. Bit ini mengindikasikan sebuah hasil negative di dalam sebuah fungsi logika atai aritmatika. 7. Bit 1(Z) Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah jasil nol “0” dalam sebuah fungsi aritmatika atau logika. 8. Bit 0(C) Merupakan bit Carry Flag. Bit ini mengindikasikan sebuah Carry atau sisa dalam sebuah aritmatika atau logika. 13 2.1.2 Peta Memori ATmega8 Gambar 2.5. Peta Memori ATmega8 (http://www.atmel.com/images/atmel-2486-8-bit-avr-microcontroller atmega8_l_datasheet.pdf) Memori atmega terbagi menjadi tiga yaitu : 1. Memori Flash Memori flash adalah memori ROM tempat kode-kode program berada. Kata flash menunjukan jenis ROM yng dapat ditulis dan dihapus secara elektrik. Memori flash terbagi menjadi dua bagian yaitu bagian aplikasi dan bagian boot. Bagian aplikasi adalah bagian kode-kode program apikasi berada. Bagian boot adalah bagian yang digunakan khusus untuk booting awal yang dapat eprogram untuk menulis bagian aplikasi tanpa melalui programmer/downloader, misalnya melalui USART. 14 2. Memori Data Memori data adalah memori RAM yang digunakan untuk keperluan program. Memori data terbagi menjadi empat bagian yaitu : 32 GPR (General Purphose Register) adalah register khusus yang bertugas untuk membantu eksekusi program oleh ALU (Arithmatich Logic Unit), dalam instruksi assembler setiap instruksi harus melibatkan GPR. Dalam bahasa C biasanya digunakan untuk variabel global atau nilai balik fungsi dan nilai-nilai yang dapat memperingan kerja ALU. Dalam istilah processor komputer sahari-hari GPR dikenal sebagai “chace memory”. I/O register dan Aditional I/O register adalah register yang difungsikan khusus untuk mengendalikan berbagai pheripheral dalam mikrokontroler seperti pin port, timer/counter, usart dan lain-lain. Register ini dalam keluarga mikrokontrol MCS51 dikenal sebagi SFR(Special Function Register). 3. EEPROM EEPROM adalah memori data yang dapat mengendap ketika chip mati (off), digunakan untuk keperluan penyimpanan data yang tahan terhadap gangguan catu daya. 2.1.3. Timer/Counter 0 Timer/counter 0 adalah sebuah timer/counter yang dapat mencacah sumber pulsa/clock baik dari dalam chip (timer) ataupun dari luar chip (counter) dengan kapasitas 8-bit atau 256 cacahan. Timer/counter dapat digunakan untuk : 1. Timer/counter biasa 2. Clear Timer on Compare Match (selain Atmega 8) 3. Generator frekuensi (selain Atmega 8) 4. Counter pulsa eksternal 15 2.1.4. Komunikasi Serial Pada ATmega8 Mikrokontroler AVR Atmega 8 memiliki Port USART pada Pin 2 dan Pin 3 untuk melakukan komunikasi data antara mikrokontroler dengan mikrokontroler ataupun mikrokontroler dengan komputer. USART dapat difungsikan sebagai transmisi data sinkron, dan asinkron. Sinkron berarti clock yang digunakan antara transmiter dan receiver satu sumber clock. Sedangkan asinkron berarti transmiter dan receiver mempunyai sumber clock sendiri-sendiri. USART terdiri dalam tiga blok yaitu clock generator, transmiter, dan receiver. Gambar 2.6.Blok USART (http://elib.unikom.ac.id/files/disk1/535/jbptunikompp-gdl-indrapurna-26711-5unikom_i-i.pdf) 16 2.1.4.1 Clock Generator Clock generator berhubungan dengan kecepatan transfer data (baud rate), register yang bertugas menentukan baud rate adalah register pasangan. 2.1.4.2. USART Transmitter Usart transmiter berhubungan dengan data pada Pin TX. Perangkat yang sering digunakan seperti register UDR sebagi tempat penampungan data yang akan ditransmisikan. Flag TXC sebagai akibat dari data yang ditransmisikan telah sukses (complete), dan flag UDRE sebagai indikator jika UDR kosong dan siap untuk diisi data yang akan ditransmisikan lagi. 2.1.4.3. USART Receiver Usart receiver berhubungan dengan penerimaan data dari Pin RX. Perangkat yang sering digunakan seperti register UDR sebagai tempat penampung data yang telah diterima, dan flag RXC sebagi indikator bahwa data telah sukses (complete) diterima (http: // elib. unikom. ac. Id / files / disk1 / 535 / jbptunikompp – gdl indrapurna – 26711 – 5 - unikom_i-i.pdf). 2.1.5. Sistem Minimum ATmega8 Rangkaian Sistem Minimum berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Komponen utama dari rangkaian sistem minimum adalah Mikrokontroler ATMega8. Pada Mikrokontroler semua program didownload, sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Sistem minimum (sismin) mikrokontroler adalah rangkaian elektronik minimum yang diperlukan untuk beroperasinya IC mikrokontroler. Sistem minimum kemudian bisa dihubungkan dengan rangkaian lampu led berjalan, motor dc, dan lain-lain untuk menjalankan fungsi tertentu (Prayoga,fajar.2012.Laporan Akhir Jurusan Teknik Elektro Program Studi Teknik Elektronika Politeknik Negeri Sriwijaya). 17 Gambar 2.7. Sistem Minimum ATmega8 2.2. Driver Motor Driver motor ini berguna untuk menggerakkan dan mengontrol motor DC dengan memberikan sinyal masukan. Ada beberapa macam driver motor DC yang biasa kita pakai seperti menggunakan relay yang diaktifkan dengan transistor sebagai saklar. Dengan berkembangnya dunia IC, sekarang sudah ada H-Bridge yang dikemas dalam satu IC dimana memudahkan kita dalam pelaksanaan hardware dan kendalinya apalagi jika menggunakan mikrokontroler. Dalam pemakaian jenis driver yang akan digunakan baik rangkaian driver motor dengan rangkaian transistor untuk membuat H-brigde atau menggunakan IC yang didalamnya mewakili driver H-bridge disesuaikan dengan kebutuhan dari motor yang dipakai. Dalam alat ini menggunakan dua jenis driver untuk menggerakkan motor DC yaitu driver motor H-Bridge dan driver relay. 18 2.2.1 Driver H-Bridge Motor DC Pada driver motor H-Bridge ini terdapat komponen transistor dan dioda. Transistor pada rangkaian driver motor DC H-Bridge berfungsi sebagai saklar elektronik untuk mengalirkan arus ke motor DC secara bridge. Daya maksimum pengendalian motor DC dengan metode bridge ini ditentukan oleh kapasitas maksimum transistor mengalirkan arus listrik. Dioda yang dipasang parallel secara reverse pada kolektro – emitor transistor berfungsi sebagai clamper dioda. Clamper dioda berfungsi untuk melindungi transistor dari lonjakan tegangan balik induksi dari motor DC. Pada rangkaian HBridge terdapat dua input dari mikrokontroler yang akan menentukan arah putaran motor. Kedua jalur input tersebut dapat diberikan sinyal input berupa logika HIGH dan LOW berdasarkan sinyal yang dikirim oleh mikrokontroler. Untuk mengendalikan motor DC dengan rangkaian dasar H-Bridge ini kedua line input tersebut tidak boleh berlogika sama. Dengan kombinasi logika input HIGH dan LOW pada kedua line input rangkaian H-Bridge ini kita dapat mengendalikan motor DC secara searah jarum jam atau clock wise (CW) dan berlawanan arah jarum jam atau counter clock wise (CCW). Untuk lebih jelas dapat dilihat skema rangkaian dasar kontrol motor DC H-Bridge pada gambar 2.8 di bawah ini. Rangkaian driver HBridge ini digunakan untuk menggerakkan motor DC pada selang pengisian yang dapat membuat gerakkan turun dan naik. 19 Gambar 2.8. Rangkaian Driver Motor H-bridge 2.2.2 Driver Relay Motor DC Pada rangkaian driver relay motor DC alat terdapat konponen IC ULN2003 dan juga relay. IC ULN2003 berfungsi sebagai penguat daya (arus/tegangan) sehingga dapat menggerakkan relay karena sinyal yang diterima dari mikrokontoler tidak dapat mencukupi (http://pccontrol.wordpress.com/2011/05/04/driver-relay/). Relay berfungsi sebagai switching elektronik yng akan menggerakkan motor DC (Motor Power Window). Gambar rangkaian dari rangkaian driver relay dapat dilihat pada gambar 2.9 berikut. 20 Gambar 2.9 Rangkaian Driver Relay Motor DC 2.3. Motor DC Sebuah motor listrik adalah mesin listrik yang mengubah energi listrik menjadi energi mekanik. Motor DC mengembangkan momen yang besar dan memungkinkan pengaturan jumlah putaran tanpa tahapan. Jumlah putaran motor dapat melebihi medan putarnya (Handayani,dkk.2008). Energi mekanik ini digunakan untuk, misalnya memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan,dan lain-lain. Motor listrik digunakan juga di rumah (mixer, bor listrik, fan angin) dan di industri. 2.3.1. Konstruksi Dasar Motor DC Bagian utama mesin listrik terdiri dari dua bagian: yaitu bagian bergerak yang disebut rotor, dan bagian diam yang disebut stator. Masing-masing bagian mempunyai lilitan kawat. Pada Stator, lilitan kawat berfungsi sebagai pembangkit medan magnet, sedangkan pada Rotor, lilitan berfungsi sebagai pembangkit gaya gerak listrik. 21 Gambar 2.10. Konstruksi Dasar Motor DC (Handayani,dkk.2008) Bagian rotor (pada mesin DC seringkali disebut jangkar) terbuat dari poros baja beralur dan lilitan kawat pada alur-alur tersebut. Untuk mesin dengan daya hingga 1 kW, terdiri dari sebuah komutator berkutub utama, yang terbuat dari baja atau lempeng elektro dengan lilitan kawat. Sepatu-sepatu kutub dari kutub utama terdapat lilitan kompensasi. Gambar 2.11 menunjukkan potongan sebuah mesin DC, dengan komutator di ujung motor. Sikat arang (carbon brush) adalah bagian dari stator. Sikat ini ditahan oleh pemegang sikat (brush holder). Gambar 2.11. Stator Mesin DC (Handayani,dkk.2008) 22 Sebuah komutator terdiri dari segmen-segmen tembaga, dimana setiap ujungnya disambungkan dengan ujung lilitan rotor. Komutator adalah bagian mesin listrik yang perlu sering dirawat dan dibersihkan. Bagian ini bersinggungan dengan sikat arang untuk memasukkan arus dari jala-jala ke rotor. Gambar 2.12 menunjukkan bagian dari sebuah komutator dan bagian lain yang saling berkaitan. Gambar 2.12. Potongan Mesin DC (Handayani,dkk.2008) 2.3.2. Prinsip Kerja Motor DC Motor-motor DC pada awalnya membutuhkan momen gerak (gaya torsi) yang besar dan tidak memerlukan kontrol kecepatan putar. Kecepatan putar motor selanjutnya akan dikontrol oleh medan magnet. Terjadinya gaya torsi pada jangkar disebabkan oleh hasil interaksi dua garis medan magnet. Kutub magnet menghasilkan garis medan magnet dari utara-selatan melewati jangkar. Lilitan jangkar yang dialiri arus listrik DC mengasilkan magnet dengan arah kekiri ditunjukkan anak panah. Interaksi kedua magnet berasal dari stator dengan magnet yang dihasilkan jangkar mengakibarkan jangkar mendapatkan gaya torsi putar berlawanan arah jarus jam. Untuk mendapatkan medan magnet stator yang dapat diatur, maka dibuat belitan elektromagnet yang dapat diatur besarnya arus eksitasinya. Gambar 2.13 menunjukkan prinsip kerja dari motor DC. 23 Gambar 2.13. Medan Eksitasi dan Medan Jangkar (Handayani,dkk.2008) 2.3.3. Jenis-jenis Motor DC 2.3.3.1 Motor Shunt Rangkaian eksitasi motor shunt terletak paralel dengan jangkar. Putaran akan turun dengan naik-nya momen torsi. Pada kondisi tanpa beban, karakteristik motor shunt arus eksitasinya tidak tergantung dari sumber tegangan yang mencatunya. Putaran jangkar akan turun dengan naiknya momen torsi. Gambar 2.14. Rangkaian Ekivalen Motor Shunt (Handayani,dkk.2008) 24 Gambar 2.15. Karekeristik Motor Shunt (Handayani,dkk.2008) 2.3.3.2 Motor Seri Rangkaian eksitasi motor seri dipasang secara seri terhadap jangkar. Diantara jenis motor DC lainnya, motor seri memerlukan momen torsi awal paling besar. Hal yang perlu diperhatikan, bahwa motor seri tidak boleh dioperasikan dalam kondisi tanpa beban. Gambar 2.16. Rangkaian Ekivalen Motor Seri Gambar 2.17. Karekteristik Motor Seri (Handayani,dkk.2008) 25 2.3.3.3 Motor Kompon Pada motor kompon, kutub utama berisi rangkaian seri dan paralel. Dalam kondisi tanpa beban, motor kompon mempunyai sifat seperti motor shunt. Pada kondisi beban terpasang, dengan momen torsi yang sama, akan didapat putaran sedikit lebih tinggi. Gambar 2.18. Rangkaian Ekivalen Motor Kompon Gambar 2.19. Karekteristik Motor Kompon (Handayani,dkk.2008) 2.4. Motor Power Window Motor DC Power Window pada prinsipnya sama dengan motor DC pada umumnya yaitu suatu motor yang dapat mengubah energi listrik searah menjadi mekanis yang berupa tenaga penggerak torsi, kecepatan motor DC dapat dikontrol putarannya sesuai torsi diperlukan untuk memenuhi kebutuhan, perputaran motor DC power window ini dapat diatur melalui driver motor H-Bridge. Driver motor H-brige 26 difungsikan sebagai driver motor yang sangat cocok sebagai pengendali motor DC yang input tegangannya ≥ 12. Gambar 2.20. Motor DC Power Window (Husna,2012) Motor DC power window biasanya digunakan untuk menaikan dan menurunkan kaca pada pintu mobil. Motor ini memiliki gear yang dapat mengunci pergerakan, sehingga posisi putaran hanya akan tearah oleh motor DC itu sendiri. Motor ini dibedakan menjadi dua arah posisi motor, yaitu motor kiri dan kanan yang keduanya memiliki posisi gear yang berlawanan. Gambar 2.21. Komponen Motor Power Window 27 Berikut ini meupakan spesifikasi dari motor DC (Motor Power Window) dan Relay Power Window : Motor Power Window Rate voltage : DC 12 volt Operating Voltage Range : DC 10 – 16 volt Operating Temperature Range : - 300 C – (+) 800 C -220 F – (+) 1760 F Speed : 40 ± 5 rpm Load : 4 N.m Power Windoe Relay : 200mA (coil load) 12 volt 10 A