Perancangan Tapis Takik ( Notch Filter) dengan Gyrator untuk
advertisement
 dengan Gyrator untuk")
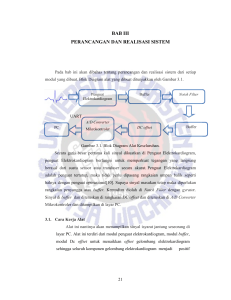
BAB II LANDASAN TEORI Pada bab ini akan dibahas secara singkat mengenai teori dasar yang digunakan untuk merancangan Tapis Takik ( Notch Filter ) dengan Gyrator untuk Meredam Derau Jala-jala pada Sensor Isyarat Jantung. 2.1. Elektrokardiogram Elektrokardiogram merupakan grafik atau gambaran rekaman aktivitas elektrik otot jantung.Sinyal ini diperoleh dengan menempelkan elektroda Ag/AgCl pada bagian tubuh tertentu. Elektrokardiogram memiliki manfaat antara lain : 1. Sebagai alat diagnostik. 2. Deteksi gangguan ‘kelistrikan’ jantung seperti hipertrofi, infark myocard, disritmia, gangguan elektrolit dan sebagainya. Dalam pengambilan sinyal elektrokardiogram, terdapat berbagai metode yang bisa dilakukan yaitu : 1. Standard Clinical ECG Teknik ini menggunakan 12 lead dan digunakan untuk menganalisa kondisi kesehatan jantung pasien. 2. Vectorcardiogram Permodelan potensial tubuh sebagai vektor 3 dimensi dengan sadapan bipolar Einthoven 3. Monitoring ECG Menggunakan 1 atau 2 elektroda yang ditempatkan pada titik tertentu yang digunakan untuk memantau kondisi kesehatan jantung pasien dalam jangka waktu yang panjang. 4 2.1.1. Sistem Konduksi Listrik Jantung [5] Jantung dapat melakukan fungsinya sebagai pompa atau melakukan kontraksi dengan baik disebabkan 3 hal, yaitu : 1. Penghasil listrik sendiri yang otomatis (pacemaker) Jantung penghasil listrik otomatis terdiri atas 3 komponen yaitu nodus SA, nodus AV, dan serabut Purkinje. 2. Konduksi listrik Konduksi atau perambatan listrik yang terjadi di jantung secara sistematis dimulai dari nodus SA, nodus AV, cabang berkas kiri dan kanan, serta berakhir di serabut Purkinje. Gambar 2.1.Sistem konduksi jantung. 3. Miokardium (otot-otot jantung) Otot-otot jantung akan mengalami kontraksi bila terjadi perubahan muatan listrik di dalam sel miokard yang dinamakan depolarisasi,sedangkan peristiwa kembalinya muatan listrik di dalam sel-sel miokard menjadi keadaan seperti semula dinamakan repolarisasi. 2.1.2. Gelombang Elektrokardiogram Ketika satu impuls dicetuskan oleh nodus SA, listrik menjalar di kedua atrium dan terjadi depolarisasi.Selanjutnya terjadi proses kontraksi di kedua atrium. 5 Gambar 2.2.Depolarisasi pada nodus SA dan atrium berkontraksi. Peristiwa ini menghasilkan gelombang P pada rekaman elektrokardiogram. Gambar 2.3.Gelombang P pada elektrokardiogram. Selanjutnya, listrik yang sudah ada di atrium meneruskan penjalarannya (konduksi) ke nodus AV, berkas His, LBB dan RBB, dan berakhir di serabut Purkinje.Pada serabut Purkinje, impuls listrik mendepolarisasikan otot-otot di kedua ventrikel dan menghasilkan kontraksi di kedua ventrikel. Gambar 2.4.Depolarisasi pada ventrikel dan terjadi kontraksi pada ventrikel. 6 Peristiwa ini menghasilkan gelombang QRS pada rekaman elektrokardiogram. Gambar 2.5.Gelombang QRS pada elektrokardiogram. Selanjutnya gelombang T muncul akibat proses repolarisasi ventrikel. Sampainya satu impuls listrik dari nodus SA ke serabut Purkinje akan menghasilkan satu gelombang P-QRS dan T. Hal ini sama dengan satu siklus jantung penuh yaitu satu kali kontraksi atrium dan ventrikel. Gambar 2.6.Repolarisasi pada ventrikel. Peristiwa ini menghasilkan gelombang T pada rekaman elektrokardiogram. Gambar 2.7.Gelombang T pada elektrokardiogram. 7 Secara keseluruhan, elektrokardiogram memiliki komponen gelombang P, gelombang QRS dan gelombang T seperti pada gambar berikut. Gambar 2.8.Sinyal elektrokardiogram secara utuh. 2.2. Metode Pengukuran Detak Jantung Detak jantung adalah jumlah waktu yang dibutuhkan oleh detak jantung per satuan waktu, biasanya dinyatakan dalam bpm (beats per minute). Jumlah denyut jantung dipengaruhi beberapa faktor yaitu aktivitas fisik atau tingkat kebugaran seseorang, suhu udara sekitar, posisi tubuh (berbaring atau berdiri), tingkat emosi, ukuran tubuh serta obat yang sedang dikonsumsi. Mengukur detak jantung dapat dilakukan sendiri tanpa menggunakan stetoskop.Pengukuran dilakukan dengan cara menggunakan jari untuk menemukan denyut nadi pada pergelangan tangan atau di leher. Gambar 2.9.Mengukur detak jantung pada pergelangan tangan. Setelah menemukan denyut nadi pada pergelangan tangan atau leher, dengan dibantu jam atau penanda waktu lainnya, detak jantung dihitung dalam rentang waktu semenit.Tetapi tentu saja cara ini membutuhkan konsentrasi tinggi dan waktu yang tidak sebentar.Cara lain yang tidak membutuhkan waktu banyak adalah dengan cara menghitung ada berapa detak jantung dalam 10 detik, kemudian hasilnya dikali 6 untuk 8 mendapatkan pendekatan waktu 1 menit. Atau dalam jangka waktu 15 detik, hasilnya dikali dengan 4. Denyut jantung normal untuk individu dewasa berkisar 60-100 kali per menit. 2.3 Band Pass Filter Band Pass Filter (BPF) merupakan sebuah untai yang berfungsi untuk meloloskan sinyal pada rentang frekuensi tertentu. Tapis ini memiliki 2 buah frekuensi penggal (fL dan fH) dan sebuah frekuensi tengah (fm). Frekuensi yang diloloskan adalah frekuensi yang berada di antara fL dan fH. Gambar 2.10. Tanggapan Frekuensi Band Pass Filter. Dalam gambar di atas fL dilambangkan dengan 2, 1 dan fH dilambangkan dengan sedangkan ∆ adalah bandwidth atau lebar pita dari tapis tersebut. Rancangan BPF sederhana umumnya dibuat dengan merangkai High Pass Filter (HPF) dan Low Pass Filter (LPF) secara seri. Jika yang dirangkai adalah HPF orde 1 dan LPF orde 1 maka yang dihasilkan adalah BPF orde 2, begitu juga apabila menggunakan HPF orde 2 dan LPF orde 2 maka akan menghasilkan BPF orde 4. Semakin besar orde menyebabkan semakin curam pada bagian frekuensi penggalnya. Untuk BPF orde 2 terdapat 2 topologi, Sallen Key dan Multiple Feedback (MFB)[8] 2.4. Notch Filter Band Reject Filter atau sering disebut Notch Filter (NF) adalah sebuah tapis yang fungsinya berkebalikan dengan BPF. Jika BPF meloloskan sinyal dengan frekuensi di antara fL dan fH, NF tidak meloloskan frekuensi yang berada di antara fL dan fH. 9 Gambar 2.11. Tanggapan Frekuensi Band Reject Filter. Pada gambar di atas fL dilambangkan dengan 2, 1 dan fH dilambangkan dengan sedangkan ∆ adalah bandwidth atau lebar pita dari tapis tersebut[8]. Band reject filter atau band stop filter aktif dibagi dalam 2 kategori sebagai berikut : Jenis Band Reject Filter Aktif 1. Band reject filter bidang lebar 2. Band reject filter bidang sempit 1. Band Reject Filter (BRF) Bidang Lebar BRF bidang lebar adalah terdiri dari rangkaian HPF dan LPF yang dimasukkan ke rangkaian penjumlah. Sedang BRF bidang sempit adalah terkenal dengan rangkaian Notch Filter yaitu menolak frekuensi tertentu. Contoh rangkaian Band Reject Filter bidang lebar seperti gambar berikut ini. Gambar 2.12. Rangkaian Dan Output Band Reject Filter (BRF) Bidang Lebar. 10 Respons Output Band Reject Filter Bidang Lebar Untuk menentukan nilai frekuensi batas atas (fH) dan frekuensi batas bawah (fL) dapat menggunakan rumus-rumus untuk rangkaian LPF dan HPF serta rangkaian penjumlah berlaku untuk menentukan nilai nilai komponen atau elemen pasif yang digunakan untuk rangkaian band reject filter bidang lebar ini. = 2 = 2 1 1 ….………...(2.1) Dimana : fH = Frekuensi batas atas (frekuensi cut Off rangkaian Low Pass Filter (LPF) fL = Frekuensi batas bawah (frekuensi cut Off rangkaian High Pass Filter (LPF) RCLPF = nilai R dan C pada sisi rangkaian Low Pass Filter (LPF) RCHPF = nilai R dan C pada sisi rangkaian High Pass Filter (HPF) 2. Band Reject Filter (BRF) Bidang Sempit Nama band reject filter bidang sempit ini sering dikenal dengan nama Aktif Notch Filter. Rangkaian menggunakan model twin-T circuit. Biasanya rangkaian aktif Notch Filter ini digunakan pada rangkaian intrumentasi medis. Pada rangkaian band reject filter (BRF) bidang sempit atau Aktif Notch Filter terdapat daerah frekuensi yang akan di tahan oleh rangkaian Notch Filter ini (fN) yang dapat dirumuskan sebagai berikut : = 2 1 …………..……(2.2) 11 Rangkaian band reject filter atau aktif Notch Filter adalah gabungan filter low pass RC dan filter high pass RC dengan konfigurasi twin-T circuit. Gambar rangkaian band reject filter bidang (BRF) sempit adalah sebagai berikut : Gambar 2.13. Rangkaian Band Reject Filter (BRF) Bidang Sempit. Notch filter adalah filter yang melewatkan semua frekuensi kecuali stop band (pita henti) yang terpusat pada frekuensi pusat. Hal ini sangat berhubungan dengan faktor Q (kualitas) suatu filter. Gambaran : Gambar 2.14. Faktor Q (kualitas ) suatu filter. Nama lain atau erat kaitannya adalah band reject single frekuensi atau narrow band dari frekuensi-frekuensi. Respon ampiludo pada Notch Filter pada semua frekuensi rata, kecuali pada bagian stop band. Titik-titik referensi standar untuk roll-offs pada masing-masing sisi stop band adalah titik dimana ampiludo menurun 3dB, atau 70,7 % dari amplitudo aslinya. Titik-titik -3dB dan -20 dB ditentukan oleh ukuran stop band terkait dengan frekuensi pusat dengan kata lain Q dari filter. Q adalah frekuensi pusat dibagi dengan lebar pita (bandwidth). 12 Gambaran diatas dapat dijelaskan sebagai berikut: • Titik- titik -3dB untuk Q=0,1 adalah sekitar 1kHz dan 100kHz dengan center frekuensi 10kHz. Pada sepersepuluh dandwidth, sekitar 600 Hz dan 1,6 kHz, amplitude turun 20 dB. • Titik- titik -3dB untuk Q=1 adalah sekitar 6kHz dan 16kHz dengan center frekuensi 10kHz. Titik – titik -20 dB tidak ditanda karena dekat ke pusat frekuensi (akan tetapi bisa saja dicari) • Dengan Q=10, respon filter bandpass, mempunyai titik-titik -3dB sangat dekat dengan center frekuensi, sama tempatnya dengan -20 db untuk Q=1. • Dalam prakteknya tidak semua Q memungkinkan. Untuk Q yang sangat tinggi respon sirkit akan mulai overshoot dan undershoot yang akan merusak integritas notch. Karena ada frekuensi yang seharusnya tertolak menjadi diperkuat. Notch filter digunakan misalnya untuk menghilangkan frekuensi yang tidak diharapkan tanpa mempengaruhi frekuensi-frekuensi lainnya secara berarti. 2.5. Gyrator Gyrator atau pembalik impedansi positif adalah sebuah sirkuit elektronik yang membalikkan impedansi. Dengan kata lain, membuat sirkuit kapasitif menjadi bersifat induktif, tapis lulus-jalur menjadi tapis stop-jalur, dan sebagainya. Ini digunakan terutama pada desain filter aktif dan pengompakan sirkuit. Gyrator adalah elemen dua-port yang ideal didefinisikan oleh persamaan berikut: ………………(2.3) dimana G konstan disebut konduktansi gyrator. 13 Simbol untuk gyrator adalah ditunjukkan pada Gambar berikut Gambar 2.15. Symbol dari Gyrator. Fungsi utama dari gyrator adalah untuk mensimulasi unsur induktif pada sirkuit elektronik kecil atau sirkuit terintegrasi. Sebelum penemuan transistor, lilitan kawat dengan induktansi tinggi digunakan untuk membuat tapis elektronik. Induktor yang sebenarnya dapat digantikan dengan rangkaian yang lebih kecil yang terdiri dari kondensator, penguat dan resistor. Hal ini sangat penting pada teknologi sirkuit terintegrasi karena induktor biasanya secara relatif sangat besar. Selain itu, pada kenyataannya, kondensator yang ada biasanya lebih dekat kepada keadaan ideal daripada induktor. Karena itu, sebuah induktor sintetik terbuat dari gyrator mungkin jauh lebih dekat pada induktor ideal daripada yang bisa dilakukan dengan induktor sebenarnya. Selain itu, penggunaan gyrator mungkin menambah kualitas jaringan tapis daripada jika menggunakan induktor. Faktor Q dari sebuah induktor sintetis juga dapat ditentukan. Gyrator dapat digunakan untuk membuat induktor dalam jangkah mikrohenry hingga megahenry. Induktor asli biasanya terbatas hanya hingga puluhan henry dengan resistansi deret di antara beberapa mikroohm hingga beberapa ratus ohm. Resistansi deret dari gyrator bergantung pada topologi sirkuit yang digunakan, tetapi biasanya di antara puluhan ohm hingga ratusan kiloohm. Untuk frekuensi yang sama, sebuah gyrator mempunyai induktansi yang jauh lebih besar, kapasitansi yang jauh lebih rendah, tetapi resistansioya lebih tinggi. 14 Penggunaan utama dari gyrator adalah untuk menggantikan induktor yang terlalu besar, berat dan mahal. Misal pada skripsi ini menggunakan induktor 0,03183 H atau 31830 µH maka dengan menggunakan rumus berikut dapat dihitung banyaknya lilitan yang diperlukan [7] : ……….(2.4) Diketahui L = 31830 µH d= 0,75 inci = 1,905cm l= 5 inci = 12,7 cm maka dapat dihitung sebagai berikut : = 31830 = 18 + 40 0,75 18.0,75 + 40.5 31830 = 0,5625 213,5 6795705 = 0,5625 = = 6795705 0,5625 6795705 0,5625 = 3475,748 !" Maka sangat diperlukan gyrator sebagai pengganti iduktor sebesar 31830µH. Karena tidak mungkin menggulung lilitan sebanyak 3475,748 lilitan. Sebagai contoh, 15 tapis lulus jalur dapat dibangun dengan menggunakan kondensator, resistor dan penguat, tanpa induktor. Ada beberapa penggunaan dimana penggunaan gyrator sebagai pengganti induktor tidak memungkinkan. Tegangan tinggi, dimana tegangan jauh melebihi tegangan kerja penguat. Sistem frekuensi radio, dimana induktor untuk frekuensi radio relatif kecil dan mudah dibuat. Pengubah daya, dimana lilitan digunakan sebagai penyimpan daya sementara. 2.6. Penguat Instrumentasi AD620 Penguat instrumentasi AD20 memiliki harga yang cukup murah, daya yang rendah dengan supply maksimum yaitu 1.3 mA, dan hanya membutuhkan satu buah resistor eksternal untuk mengatur gain dari 1 hingga 10000. Berikut adalah susunan pin IC AD620 : Gambar 2.16. Susunan pin IC AD620 tampak atas. Penguatan menggunakan satu resistor pada pin nomor 1 dan nomor 8 dan dirumuskan sebagai berikut : ………………(2.5) …………….(2.6) 16 2.7. Mikrokontroler ATMega32 AVR adalah mikrokontroler RISC (Reduce Instruction Set Complete)8 bit berdasarkan arsitektur Harvard, yang dibuat oleh Atmel pada tahun 1996. AVR mempunyai kepanjangan Advanced Versatile RISCatau Alf and Vegard’s Risc Processoryang berasal dari nama dua mahasiswa Norwegian Institute Of Technology (NTH), yaitu Alf-Egil Bogen dan Vegard Wollan. AVR memiliki keunggulan dibanding dengan mikrokontroler lain, keunggulannya adalah AVR memiliki kecepatan eksekusi program yang lebih cepat karena sebagian besar instruksi dieksekusi dalam 1 siklus clock, lebih cepat dibanding mikrokontroler MCS51 yang memiliki arsitektur CISC (Complex Instruction Set Complete) dimana mikrokontroler MCS51 membutuhkan 12 siklus clock untuk mengeksekusi 1 instruksi. Secara umum, mikrokontroler AVR dapat dikelompokkan menjadi 3 bagian yaitu keluarga AT90SXX, ATMega, dan ATtiny. Diantara ketiganya, megaAVR umumnya memiliki fitur yang paling lengkap. Untuk memberi gambaran yang lebih jelas, Tabel 2.1 berikut memperlihatkan perbedaan ketiga seri AVR ditinjau dari jumlah memori yang dimilikinya. Tabel 2.1. Perbedaan seri AVR berdasarkan jumlah memori. Sesuai tabel tersebut, semua jenis AVR ini telah dilengkapi dengan memori flash sebagai memori program. Tergantung serinya, kapasitas memori flash yang dimiliki bervariasi dari 1K sampai 128 KB.Untuk penyimpanan data, mikrokontroler AVR menyediakan dua jenis memori yang berbeda: EEPROM (Electrically Erasable Programmable Read Only Memory) dan SRAM (Static Random Access memory). EEPROM umumnya digunakan untuk menyimpan data-data program yang bersifat permanen, sedangkan SRAM digunakan untuk menyimpan data variabel yang dimungkinkan berubah setiap saatnya. Berikut adalah fitur yang dimiliki ATMega32 : 1. 8 bit AVR berbasis RISC dengan performa tinggi dan konsumsi daya rendah. 2. Kecepatan maksimal 16 MHz. 17 3. Memiliki kapasitas Flash memori 8 kByte, EEPROM 512 Byte, dan SRAM 512 Byte. 4. Saluran I/O sebanyak 32 buah yaitu Port A, Port B, Port C dan Port D. 5. CPU yang terdiri atas 32 buah register. 6. Unit interupsi internal dan eksternal. 7. Port USART untuk komunikasi serial. 8. Memiliki 2 buah timer 8 bit yaitu Timer 0 dan Timer 2 serta 1 buah timer 16 bit yaitu Timer 1. 9. 8 channel, 10-bit ADC. Susunan pin IC mikrokontroler ATMega32 ditunjukkan pada Gambar 2.17. berikut: Gambar 2.17. Susunan Pin ATMega32. Dari gambar diatas, dapat dijelaskanfungsi dari masing-masing pin ATMega32 sebagai berikut : 1. VCC, merupakan pin yang berfungsi sebagai masukan catu daya. 2. GND, merupakan pin ground. 3. RESET, merupakan pin yang digunakan untuk me-reset mikrokontroler. 4. XTAL1 dan XTAL2, merupakan pin masukan clock eksternal. 5. AVCC, merupakan pin masukan tegangan untuk ADC. 6. AREF, merupakan pin masukan tegangan referensi ADC. 18 7. Port A (PA.0 PA.7), merupakan pin input atau output dua arah dan dapat juga digunakan sebagai pin masukan ADC. 8. Port B (PB.0 PB.7), merupakan pin input atau output dua arah. 9. Port C (PC.0 PC.7), merupakan pin input atau output dua arah. 10. Port D (PD.0 PD.7), merupakan pin input atau output dua arah. 2.8. Analog To Digital Converter (A/D Converter) Mikrokontroler AVR memiliki fasilitas A/D converteryang memiliki fitur sebagai berikut : 1. Resolusi maksimum 10 bit( dapat dipilih 8 bit ). 2. 0.5 LSB Integral Non Linearity. 3. Akurasi mutlak ± 2 LSB. 4. Waktu konversi 13-260 µs. 5. 8 kanal masukan single ended termultipleks. 6. Jangkauan tegangan masukan ADC dari 0 volt sampai tegangan VCC. 7. Tegangan referensi internal 2.56 volt yang dapat dipilih. 8. Mode konversi free running atau konversi tunggal. 9. ADC Start Conversionoleh Auto Triggeringpada sumber interupsi. 10. Interupsi pada saat konversi ADC selesai. 11. Sleep Mode Noise Canceler. Register yang digunakan untuk inisialisasi ADC adalah : 1. ADC Control & Status Register A (ADCSRA) Register ini berfungsi untuk melakukan pengaturan dan status ADC. Gambar 2.18.Register ADCSRA. 19 2. ADC Multiplexer (ADMUX) Register ini digunakan untuk menentukan sumber tegangan referensi, mode hasil ADC dan konfigurasi masukan ADC. Gambar 2.19.Register ADMUX. 20