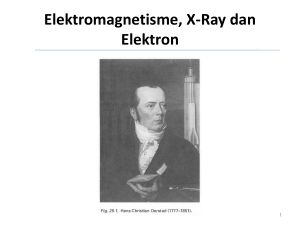
Gambar 2.1 Sensor TCRT5000
advertisement

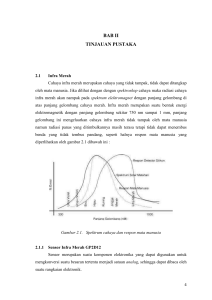
BAB II TINJAUAN PUSTAKA 2.1 SENSOR Sensor merupakan transducer yang digunakan untuk mendeteksi kondisi suatu proses. Sedangkan yang dimaksud transducer adalah perangkat keras untuk mengubah informasi suatu bentuk energi ke informasi bentuk energi yang lain secara operasional. Sensor memiliki berapa jenis sesuai dengan aplikasi yang dibutuhkan. Dalam pembuatan robot pengantar barang ini menggunakan berapa sensor, diantaranya adalah sensor TCRT 5000. 2.1.2 Sensor TCRT5000 Prinsip sensor TCRT5000 adalah mendeteksi warna berdasarkan penyerapan warna dan intensitas pematulan sinar infra merah yang dipancarkan oleh transmiter (IR led) dan diterima oleh receiver (foto transistor). Dari perbedaan identitas tersebut digunakan sebagai bias pada basis foto transistor yang terkandung didalam sensor TCRT5000. Untuk lebih jelas perhatikan pada gambar 2.1 5 6 Gambar 2.1 Sensor TCRT5000 2.2 LIMIT SWITCH Limit Switch merupakan sensor yang prinsip kerjanya menyerupahi saklar. Limit Switch mememiliki dua keadaan normal yaitu normally open dan Normally Close. Normally Open yaitu pada keadaan tidak aktif Switch berada pada keadaan terbuka, Normally Close yaitu keadaan tidak aktif Switch berada pada keadaan terbuka. (a) simbol kontak normally open (b) simbol kontak normally close Gambar 2.2 Limit Switch 7 2.3 PUSH BUTTON. Push Button untuk tombol seting enteri parameter PID, tomobol skip, tombol up down, tombol enter. Gambar 2.3 Push Button Tombol tekan merupakan komponen control yang sangat berguna, alat ini dapat kita jumpai pada panel listrik atau di luar panel listrik. Fungsi tombol tekan adalah untuk mengontrol kondisi on atau off rangkaian listrik, prinsip kerja tombol tekan adalah kerja sesaat maksudnya jika tombol kita tekan sesaat maka akan kembali pada posisi semula. Berdasarkan fungsinya tombol tekan terbagi atas 3 tipe kontak : a. Kontak NO (Normally Open = Kondisi terbuka) Tombol jenis ini biasanya digunakan untuk menghubungkan arus pada suatu rangkaian Kontrol atau sebagai tombol start. Fungsi mengalirkan arus pada tombol ini terjadi apabila pada bagian knop nya ditekan sehingga kontaknya saling terhubung dan aliran listrik akan terputus apabila knopnya dilepas karena terdapat pegas. 8 b. Kontak NC (Normally Close = Kondisi Tertutup) Tombol jenis ini adalah jenis kontak tertutup biasanya di gunakan untuk memutus arus listrik yaitu dengan cara menekan knopnya sehingga kontaknya terpisah, namun kalau knop di lepas maka akan kembali pada posisi semula. Tombol jenis ini digunakan untuk tombol stop. c. Kontak NO dan NC Kontak pada tombol tekan jenis ini merupakan gabungan antara kontak NO dan kontak NC, mereka bekerja secara bersamaan dalam satu poros. Jika tombol di tekan maka kontak NO yang semula terbuka (open) dan kontak NC yang terhubung (close) akan berbalik arah yaitu Kontak NO akan menjadi terhubung (close) dan Kontak NC akan menjadi terbuka (open). Jika knop pada tombol di lepaskan maka akan kembali ke posisi semula 2.4 SENSOR OPTOCOUPLER Sensor Optocoupler digunakan untuk menghitung kecepatan dari motor dc. Dengan mengetahui prinsip dari Optocoupler ini maka harus dibuat penghalang antara transistor dan LED, pada penghalang itu diberi lubang. Ketika berputar output dari transistor akan mengalami high dan low. 9 Gamabr 2.4 Sensor Optocoupler. 2.5 MIKROKONTROLLER Mikrokontroller merupakan contoh suatu sistem komputer sederhana yang masuk dalam kategori embedded komputer. Di dalam sebuah mikrokontroller terdapat komponen-komponen seperti: processor, memory, clock, peripheral I/O, dll. Mikrokontroller memiliki kemampuan manipulasi data (informasi) berdasarkan suatu urutan instruksi (program) yang dibuat oleh programmer. Mikrokontroller adalah piranti elektronik yang dikemas dalam bentuk sebuah IC (Integrated Circuit) tunggal, sebagai bagian utama dan beberapa peripheral lain yang harus ditambahkan, seperti kristal dan kapasitor. Mikrokontroller AVR memiliki arsitektur RISC 8 Bit, sehingga semua instruksi dikemas dalam kode 16-bit (16-bits word) dan sebagian besar instruksi dieksekusi dalam satu siklus instruksi clock. Bandingkan dengan instruksi keluarga MCS-51 (arsitektur CISC) yang membutuhkan siklus 12 clock. RISC adalah Reduced Instruction Set Computing sedangkan CISC adalah Complex Instruction Set Computing. 10 AVR dikelompokkan kedalam 4 kelas, yaitu ATtiny, keluarga AT90Sxx, keluarga ATmega, dan keluarga AT86RFxx. Dari kesemua kelas yang membedakan satu sama lain adalah ukuran onboard memori, on-board peripheral dan fungsinya. Dipilih Atmega8535 karena populasi yang banyak, sehingga ketersediaan komponen dan referensi penunjang lebih terjamin. Tabel 2.1 Perbandingan Spesifikasi dan Fitur Keluarga AVR Keterangan: a. Flash adalah suatu jenis Read Only Memory yang biasanya diisi dengan program hasil perencanaan, yang harus dijalankan oleh mikrokontroler. b. RAM (Random membantu CPU Acces untuk Memory) merupakan penyimpanan data pengolahan data ketika program sedang running. memori yang sementara dan 11 c. EEPROM (Electrically Erasable Programmable Read Only Memory) adalah memori untuk penyimpanan data secara permanen oleh program yang sedang running. d. Port I/O adalah kaki untuk jalur keluar atau masuk sinyal sebagai hasil keluaran ataupun masukan bagi program. e. Timer adalah modul dalam hardware yang bekerja untuk menghitung waktu/pulsa. f. UART (Universal Asynchronous Receive Transmit) adalah jalur komunikasi data khusus secara serial asynchronous. g. PWM (Pulse Width Modulation) adalah fasilitas untuk membuat modulasi pulsa. h. ADC (Analog to Digital Converter) adalah fasilitas untuk dapat menerima sinyal analog dalam range tertentu untuk kemudian dikonversi menjadi suatu nilai digital dalam range tertentu. i. SPI (Serial Peripheral Interface) adalah jalur komunikasi data khusus secara serial secara serial synchronous j. ISP (In System Programming) adalah kemampuan khusus mikrokontroler untuk dapat diprogram langsung dalam sistem rangkaiannya dengan membutuhkan jumlah pin yang minimal 12 2.5.1 Arsitetur Atmega 8535 a. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D. b. ADC 10 bit sebanyak 8 Channel. c. Tiga buah timer / counter. d. 32 register. e. Watchdog Timer dengan oscilator internal. f. SRAM sebanyak 512 byte. g. Memori Flash sebesar 8 kb. h. Sumber Interrupt internal dan eksternal. i. Port SPI (Serial Peripheral Interface). j. EEPROM on board sebanyak 512 byte. k. Komparator analog. l. Port USART (Universal Shynchronous Ashynchronous Receiver Transmitter). 2.5.2 Fitur Atmega 8535 a. Sistem processor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz. b. Ukuran memory flash 8KB, SRAM sebesar 512 byte, EEPROM sebesar 512 byte. c. ADC internal dengan resolusi 10 bit sebanyak 8 channel. 13 d. Port komunikasi serial USART dengan kecepatan maksimal 2.5 Mbps. e. Mode Sleep untuk penghematan penggunaan daya listrik. 2.5.3 Konfigurasi Pin Atmega 8535 a. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya. b. GND merupakan pin Ground. c. Port A (PA0...PA7) merupakan pin I/O dan pin masukan ADC. d. Port B (PB0...PB7) merupakan pin I/O dan pin yang mempunyai fungsi khusus yaitu Timer/Counter, komparator Analog dan SPI. e. Port C (PC0...PC7) merupakan port I/O dan pin yang mempunyai fungsi khusus, yaitu komparator analog dan Timer Oscillator. f. Port D (PD0...PD1) merupakan port I/O dan pin fungsi khusus yaitu komparator analog dan interrupt eksternal serta komunikasi serial. g. RESET merupakan pin yang digunakan untuk mereset mikrokontroler. h. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal. i. AVCC merupakan pin masukan untuk suplai tegangan ADC. j. AREF merupakan pin masukan tegangan referensi untuk ADC 14 Gambar 2.5 Pin-out Atmega 8535 15 2.5.4 Tabel Pin Atmega 8535 Berikut ini adalah tabel penjelasan mengenai pin yang terdapat pada mikrokontroler ATMega8535: Vcc Tabel 2.2 Pin Atmega 8535 Tegangan suplai (5 volt) GND Ground Input reset level rendah, pada pin ini selama lebih dari panjang pulsa minimum akan menghasilkan reset walaupun clock sedang berjalan. RST pada pin 9 RESET merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka sistem akan di-reset XTAL 1 Input penguat osilator inverting dan input pada rangkaian operasi clock internal XTAL 2 Output dari penguat osilator inverting Pin tegangan suplai untuk port A dan ADC. Pin ini harus Avcc dihubungkan ke Vcc walaupun ADC tidak digunakan, maka pin ini harus dihubungkan ke Vcc melalui low pass filter Aref pin referensi tegangan analog untuk ADC pin untuk analog ground. Hubungkan kaki ini ke GND, AGND kecuali jika board memiliki analog ground yang terpisah 16 2.5.5 Penjelasan Pin Mikrokontroller Atmega 8535. Berikut ini adalah penjelasan dari pin mikrokontroler ATMega 8535 menurut port-nya masing-masing: a. Port A. Pin33 sampai dengan pin 40 merupakan pin dari port A. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus di-setting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin pada port A juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel: Pin Tabel 2.3 Penjelasan Pin Pada Port A Keterangan PA.7 ADC7 (ADC Input Channel 7) PA.6 ADC6 (ADC Input Channel 6) PA.5 ADC7 (ADC Input Channel 5) PA.5 ADC4 (ADC Input Channel 4) PA.3 ADC3 (ADC Input Channel 3) PA.2 ADC2 (ADC Input Channel 2) 17 PA.1 ADC1 (ADC Input Channel 1) PA.0 ADC0 (ADC Input Channel 0) b. Port B. Pin 1 sampai dengan pin 8 merupakan pin dari port B. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus di-setting terlebih dahulu sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port B juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel: Pin Tabel 2.4 Penjelasan Pin Pada Port B Keterangan PB.7 SCK (SPI Bus Serial Clock) PB.6 VISO (SPI Bus Master Input/Slave Output) PB.5 VOSI (SPI Bus Master Output/Slave Input) PB.4 SS (SPI Slave Select Input) AIN1 (Analog Comparator Negative Input)OCC PB.3 (Timer/Counter0 Output Compare Match Output) 18 AIN0 (Analog Comparator Positive Input)INT2 (External PB.2 Interrupt2 Input) PB.1 T1 (Timer/Counter1 External Counter Input) T0 (Timer/Counter0 External Counter Input)XCK (JSART PB.0 External Clock Input/Output) c. Port C. Pin 22 sampai dengan pin 29 merupakan pin dari port C. Port C sendiri merupakan port input atau output. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus di-setting terlebih dahulu sebelum port C digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif: Pin Tabel 2.5 Penjelasan Pin Pada Port C Keterangan PC.7 TOSC2 (Timer Oscillator Pin 2) PC.6 TOSC1 (Timer Oscillator Pin 1) PC.1 SDA (Two-Wire Serial Bus Data Input/Output Line) PC.0 SCL (Two-Wire Serial Bus Clock Line) 19 d. Port D. Pin 14 sampai dengan pin 20 merupakan pin dari port D. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus di-setting terlebih dahulu sebelum port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel: Pin Tabel 2.6 Penjelasan Pin Pada Port D Keterangan PD.0 RDX (UART input line) PD.1 TDX (UART output line) PD.2 INT0 (external interrupt 0 input) PD.3 INT1 (external interrupt 1 input) PD.4 OC1B (Timer/Counter1 output compareB match output) PD.5 OC1A (Timer/Counter1 output compareA match output) PD.6 ICP (Timer/Counter1 input capture pin) PD.7 OC2 (Timer/Counter2 output compare match output) 20 2.6 LCD DISPLAY Display elektronik adalah salah satu komponen elektronika yang berfungsi sebagai tampilan suatu data, baik karakter, huruf ataupun grafik. LCD (Liquid Cristal Display) adalah salah satu jenis display elektronik yang dibuat dengan teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya tetapi memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau mentransmisikan cahaya dari back-lit. LCD (Liquid Cristal Display) berfungsi sebagai penampilan data baik dalam bentuk karakter, huruf, angka ataupun grafik. Untuk menampilkan nilai putaran per menit motor kanan dan motor kiri. Gamabr 2.6 LCD Display 21 2.7 DRIVER MOTOR DC Rangkaian Driver Motor DC digunakan sebagai penguat putaran dari motor DC yang dikendalikan. Setiap motor dibutuhkan Driver Motor. 2.7.1 Driver Motor DC IC L298 Gamabr 2.7 Driver Motor DC IC L298 L298 adalah Driver Motor berbasis H-Bridge, mampu menangani beban hingga 4A pada tegangan 6V – 46V. Dalam chip terdapat dua rangkaian H-Bridge. L298 menggunakan rangkaian dasar transistor (BJT). Kekurangan dari rangkaian berbasis BJT adalah tegangan saturasi yang cukup tinggi, yang akan menjadi faktor bagi timbulnya panas yang cukup tinggi ketika menangani beban. Untuk opsi yang lebih “dingin” bisa mempertimbangkan chip driver motor berbasis MOSFET. 22 Untuk dioda flyback (EMF protection) disarankan menggunakan dioda tipe schottky – 1N5818, yang memiliki respons lebih cepat. Pada rangkaian di atas, Vmotor (Vin) juga merupakan tegangan input dari regulator. Jadi, perlu diperhatikan tegangan input maksimum dari regulator yang digunakan. LM2937 memiliki tegangan input maksimum 26V. Bisa diganti dengan 7805 yang mampu menangani tegangan input hingga 30V. Dioda 1N5818 juga memiliki batasan 30V. Untuk yang lebih tinggi, gunakan 1N5819 yang memiliki kemampuan hingga 35V. Berikut adalah hasil pengujian, yang dikutip dari situs Solarbotics Tabel 2.7 Hasil Pengujian Rangkaian L298 2.8 MOTOR DC Yang dimaksud dari motor arus searah (DC) adalah suatu motor yang berfungsi mengubah tenaga listrik arus searah (listrik DC) menjadi tenaga mekanik dimana tenaga gerak tersebut berupa putaran dari motor. Pada kenyataan setiap motor mempunyai dua bagian dasar: 23 a. Bagian yang tetap atau stasioner disebut stator. Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari sebuah koil (elektromagnet) maupun magnet permanen. b. Bagian yang berupa disebut rotor atau armatur. Rotor ini berupa sebuah koil dimana arus listrik mengalir. Dalam kehidupan seharihari kita banyak menjumpai motor arus searah diantaranya motor starter mobil, tape recorder, kipas angin dan lain sebagainya. 2.8.1 Dasar-dasar Motor DC Motor DC merupakan jenis motor yang menggunakan tegangan searah sebagai sumber tenaganya. Dengan memberikan beda tegangan pada kedua terminal tersebut, motor akan berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik maka arah putaran motor akan terbalik pula. Polaritas dari tegangan yang diberikan pada dua terminal menentukan arah putaran motor sedangkan besar dari beda tegangan pada kedua terminal menentukan kecepatan motor. Motor DC memiliki 2 bagian dasar : a. Bagian yang tetap/stasioner yang disebut stator. Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari sebuah koil (elektro magnet) ataupun magnet permanen. b. Bagian yang berputar disebut rotor. Rotor ini berupa sebuah koil dimana arus listrik mengalir. 24 Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh megnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir pada penghantar yang terletak dalam medan magnet akan menimbulkan gaya. Gaya F, timbul tergantung pada arah arus I, dan arah medan magnet B. Gambar 2.8 Konstruksi Motor DC Belitan stator merupakan elektromagnet, dengan penguat magnet terpisah F1-F2. Belitan jangkar ditopang oleh poros dengan ujungujungnya terhubung ke komutator dan sikat arang A1-A2. Arus listrik DC pada penguat magnet mengalir dari F1 menuju F2 menghasilkan medan magnet yang memotong belitan jangkar. Belitan jangkar diberikan listrik DC dari A2 menuju ke A1. Sesuai kaidah tangan kiri jangkar akan berputar berlawanan jarum jam. 25 Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh megnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir pada penghantar yang terletak dalam medan magnet akan menimbulkan gaya. Gaya F, timbul tergantung pada arah arus I, dan arah medan magnet B. Arah gaya F dapat ditentukan dengan aturan tangan kiri seperti pada gambar berikut. Gambar 2.9 Penentuan Arah Gaya Pada Kawat Berarus Listrik Dalam Medan Magnet Gambar 2.10 Contoh Jenis-jenis Motor DC 26 Metode PWM (Metode Pulse Width Modulation) adalah metode yang cukup efektif untuk mengendalikan kecepatan motor DC. PWM ini bekerja dengan cara membuat gelombang persegi yang memiliki perbandingan pulsa high terhadap pulsa low yang telah tertentu, biasanya diskalakan dari 0 hingga 100%. Gelombang persegi ini memiliki frekuensi tetap (biasanya max 10 KHz) namun lebar pulsa high dan low dalam 1 periode yang akan diatur. Perbandingan pulsa high terhadap low ini akan menentukan jumlah daya yang diberikan ke motor DC. Gambar 2.11 Pulsa High Terhadap Low Untuk menjalankan motor DC dengan PWN tidak dapat digunakan relay, melainkan harus digunakan rangkaian driver motor DC lainnya. Rangkaian ini yang paling sederhana berupa transistor yang disusun secara Darlington. Transistor yang dipakai dapat berupa transistor jenis NPN tipe BC547. Rangkaian ini mampu mengalirkan sampai arus 100 mA DC. 27 Gambar 2.12 Rangkaian Driver Motor DC Apabila diinginkan motor DC dapat bergerak 2 arah, maka diperlukan menyusun rangkaian H-Bridge. Selain transistor, dapat juga digunakan IC driver motor DC khusus. Anda dapat juga menggunakan modul driver motor DC yang siap pakai untuk mikrokontroler. 2.8.2 Motor DC Gear Box DC motor gear box adalah motor DC dipadukan dengan gear box dalam satu kemasan sehingga lebih praktis dalam penggunaannya. Keunggulan DC motor gear box adalah terbuat dari bahan metal sehinnga gear kokoh dan kuat walau dengan beban yang berat. DC motor gear box memiliki kecepatan putar dengan tiga pilihan yaitu 22 Rpm, serta memiliki torsi 5 Kg, 5-24 Voltase, 0,85 Ampere, gear ratio 1:200. 28 Gamabr 2.13 Motor Gear Box 2.8.3 Speed Control DC Motor PID. a. DC Motor Speed System Modeling. Sebuah aktuator umum dalam sistem kontrol motor DC. Ini secara langsung memberikan gerakan berputar dan, ditambah dengan roda atau drum dan kabel, dapat memberikan gerak translasi. Rangkaian ekuivalen listrik dari dinamo dan diagram benda bebas dari rotor ditunjukkan pada gambar berikut. Gambar 2.14 Rangkaian Ekuivalen Listrik 29 Untuk contoh ini, kita akan mengasumsikan bahwa input dari sistem ini adalah sumber tegangan (V) diterapkan pada armature motor, sedangkan output adalah kecepatan rotasi poros d (theta) / dt. Rotor dan poros diasumsikan keras. Kami lebih lanjut mengasumsikan model gesekan kental, yaitu, torsi gesekan sebanding dengan kecepatan sudut poros Parameter fisik Contohnya adalah: (J) Momen inersia rotor 0.01 kg. , m⋀ 2 (b) Motor gesekan konstan 0.1 N. m. s (Ke) Gaya gerak listrik konstan 0.01 V/rad/sec (Kt) torsi motor konstan 0.01 N. m/Amp (R) resistensi listrik 1 Ohm (L) Induktansi listrik 0.5 H Persamaan DC Motor Speed System Modeling: 1. Persamaan Sistem. Secara umum, torsi yang dihasilkan oleh motor DC adalah sebanding dengan arus armature dan kekuatan medan magnet. Dalam contoh ini kita akan mengasumsikan bahwa medan magnet konstan dan, karena itu, bahwa torsi motor sebanding dengan hanya dinamo arus i dengan faktor Kt konstan seperti yang ditunjukkan dalam persamaan di bawah ini. Hal ini disebut sebagai motor armature dikendalikan. 30 𝑇 = 𝐾𝑡 𝑖 (2-1) Bagian belakang emf, e, sebanding dengan kecepatan sudut poros dengan faktor konstan Ke. 𝑒 = 𝑘𝑒 𝜃 (2-3) Dalam satuan SI, torsi motor dan konstanta emf kembali adalah sama, yaitu, Kt = Ke, sehingga kita akan menggunakan K untuk mewakili kedua konstanta torsi motor dan konstanta emf kembali. Dari gambar di atas, kita dapat memperoleh persamaan pemerintahan berikut berdasarkan hukum ke-2 Newton dan hukum tegangan. 𝐽𝜃̈ + 𝑏𝜃̇ = 𝑘𝑖 (2-4) 𝑑𝑖 𝐿 𝑑𝑡 + 𝑅𝑖 = 𝑉 − 𝑘𝜃̇ (2-5) 2. Transfer Function. Menerapkan transformasi Laplace, persamaan pemodelan di atas dapat dinyatakan dalam hal Laplace variabel s. 𝑠( 𝐽𝑠 + 𝑏)Θ(𝑠) = 𝐾𝐼(𝑠) (2-6) (𝐿𝑠 + 𝑅)𝐼(𝑠) = 𝑉(𝑠) − 𝐾𝑠Θ (𝑠) (2-7) Kami tiba di berikut fungsi transfer loop terbuka dengan menghilangkan I (s) antara kedua persamaan di atas, di mana kecepatan rotasi dianggap output dan tegangan dinamo dianggap input. Θ(𝑠) 𝐾 𝑟𝑎𝑑/𝑠𝑒𝑐 𝑃(𝑠) = 𝑉(𝑠) = (𝐽𝑠+𝑏)(𝐿𝑠+𝑅)+𝐾2 [ 𝑉 ] (2-8) 31 3. State-Space. Dalam bentuk state-space, persamaan yang mengatur di atas dapat dinyatakan dengan memilih kecepatan rotasi dan arus listrik sebagai kondisi variabel. Sekali lagi tegangan dinamo diperlakukan sebagai masukan dan kecepatan rotasi dipilih sebagai output. 𝑏 − Θ̈] = [ 𝑗 [ 𝐾 𝑑𝑡 𝑖 − 𝑑 𝐿 𝑦 = [1 𝑘 ̇ 𝑗 ] [𝜃 ] 𝑅 𝑖 −𝐿 0 + [1] (2-9) 𝐿 ̇ 0] [𝜃] 𝑖 (2-10) b. DC Motor Speed PID Controller Design. PID (dari singkatan bahasa Inggris: Proportional–Integral– Derivative controller) merupakan kontroler untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan balik pada sistem tesebut. Komponen kontrol PID ini terdiri dari tiga jenis yaitu Proportional, Integratif dan Derivatif. 1. Kontrol Proporsional. Kontrol P jika G(s) = kp, dengan k adalah konstanta. Jika u = G(s) • e maka u = Kp • e dengan Kp adalah Konstanta Proporsional. Kp berlaku sebagai Gain (penguat) saja tanpa memberikan efek dinamik kepada kinerja kontroler. Penggunaan kontrol P memiliki berbagai keterbatasan karena sifat kontrol yang tidak dinamik ini. Walaupun demikian dalam aplikasi- 32 aplikasi dasar yang sederhana kontrol P ini cukup mampu untuk memperbaiki respon transien khususnya rise timedan settling time. 2. Kontrol Integratif. Jika G(s) adalah kontrol I maka u dapat dinyatakan sebagai u(t)=[integral e(t)dT] Ki dengan Ki adalah konstanta Integral, dan dari persamaan di atas, G(s) dapat dinyatakan sebagai u=Kd.[delta e/delta t] Jika e(T) mendekati konstan (bukan nol) maka u(t) akan menjadi sangat besar sehingga diharapkan dapat memperbaiki error. Jika e(T) mendekati nol maka efek kontrol I ini semakin kecil. Kontrol I dapat memperbaiki sekaligus menghilangkan respon steady-state, namun pemilihan Ki yang tidak tepat dapat menyebabkan respon transien yang tinggi sehingga dapat menyebabkan ke tidak stabilan sistem. Pemilihan Ki yang sangat tinggi justru dapat menyebabkan output berosilasi karena menambah orde sistem. 3. Kontrol Derivatif. Sinyal kontrol yang dihasilkan oleh kontrol D dapat dinyatakan sebagai G(s)=s.Kd Dari persamaan di atas, nampak bahwa sifat dari kontrol D ini dalam konteks "kecepatan" atau rate dari error. Dengan sifat ini ia dapat digunakan untuk memperbaiki respon transien dengan memprediksi error yang akan terjadi. 33 Gambar 2.15 Diagram Blok Sistem Kontrol PID Mode kontrol proposional integral derivative (PID) adalah aksi kontrol PID yang pada dasarnya bertujuan untuk menggabungkan kelebihan komponen-komponen dasar kontrol PID. a) Kontrol propordional: berfungsi untuk mempercepat. 𝑝𝑜𝑢𝑡 = 𝑘𝑝 𝑒(𝑡) b) (2-11) Kontrol Integral : berfungsi untu menghilangkan error steady. 𝑡 𝐼𝑜𝑢𝑡 = 𝑘𝑖 ∫0 𝑒(𝑇) 𝑑𝑇 c) (2-10) Kontrol derivatif : berfungsi untuk memperbaiki sekaligus mempercepat respon transsien. 𝐷 𝐷𝑜𝑢𝑡 = 𝑘𝑑 𝐷𝑡 𝑒(𝑡) (2-11) 34 Pada gambar 2.15 adalah diagram blok sistem kontrol PID yang merupakan penggabungan dari fungsi kontrol proporsional, integral, derivatif. Masing-masing keunggulan aksi kontrol tertentu, dimana ini mempunyai aksi kontrol keunggulanproporsional mempunyai keunggulan risetime yang cepat, aksi kontrol integral mempunyai keunggulan untuk memperkecil error, dan aksi kontrol derivatif mempunyai keunggulan untuk memperkecil error atau meredam overshot/undershot. Untuk itu agar kita dapat menghasilkan output dengan risetime yang tinggi dan error yang kecil kita dapat menggabungkan ketiga aksi kontrol ini menjadi aksi kontrol PID. a) Formula matematis dari PID: 𝑡 𝑉𝑜 = 𝐾𝑝. 𝑒(𝑡) + 𝐾𝑖 ∫0 𝑒 (𝑡)𝑑𝑡 + 𝑘𝑑 b) 𝑑𝑒 (𝑡) 𝑑𝑡 Bentuk kontroler PID diskrit: 1 𝑢(𝑘) = 𝑘𝑝𝑒𝑘 + 𝑘𝐼 𝑇 ∑𝑘0 𝑒𝑘 + 𝑇 𝑘𝐷 (𝑒𝐾 − 𝑒𝑘−1 ) c) (2-12) (2-13) Bila terapkan dengan bahasa pemrograman: 𝑉𝑜 = 𝐾𝑝 × 𝑒𝑟𝑟𝑜𝑟 + 𝐾𝑖 × (𝑒𝑟𝑟𝑜𝑟 + 𝑙𝑎𝑠𝑡_𝑒𝑟𝑟𝑜𝑟) × 𝑇𝑠 + (𝑒𝑟𝑟𝑜 − 𝑙𝑎𝑠𝑡_𝑒𝑟𝑟𝑜𝑟) 𝐾𝑑 𝑇𝑠 × (2-14)