KESTABILAN PADA MODEL PESAWAT TERBANG
advertisement

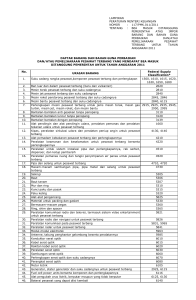
KESTABILAN PADA MODEL PESAWAT TERBANG “AMIMORPHTORCH” Didik Setyo Purnomo, ST, M.Eng, Anggota IEEE, Nu Rhahida Arini, ST, M.T, Inoe Zarista Nu Rhahida Arini is with the Department of Mechatronics Engineering, Electronics Engineering Polytechnic Institute of Surabaya (EEPIS), EEPIS Campus Sukolilo, Surabaya 60111, Indonesia. (Tel: +62-31-594-7280 ext. 4186; Fax: +62-31-594-6114; Email: [email protected]). Didik Setyo Purnomo is with the Department of Mechatronics Engineering, Electronics Engineering Polytechnic Institute of Surabaya (EEPIS), EEPIS Campus Sukolilo, Surabaya 60111, Indonesia. (Email: [email protected]). Inoe Zarista is with the Department of Mechatronics Engineering, Electronics Engineering Polytechnic Institute of Surabaya (EEPIS), Indonesia. (Email: [email protected]). ABSTRAK Upaya penelitian dan pengembangan yang diuraikan dalam buku ini ditujukan pada rancang model kendaraan udara jenis VTOL yang dapat melakukan pendaratan dan penerbangan secara vertikal (VTOL) dengan kemampuan melayang-layang(hover) dan penanggulangan contra rotating yang disebabkan oleh inersia dari motor dc brushless. Bentuk wujud dari model kendaraan udara jenis VTOL didasarkan pada suatu sistem yang terdiri dari satu motor bersama dengan balingbalingnya. Proyek akhir ini telah merekam nilai dari ketinggian, percepatan sudut, dan kecepatan motor. Sistem yang telah diadopsi hanya mempunyai sedikit tenaga putar pada baling-baling yang dikarenakan memanasnya motor. Hal itu terjadi dikarenakan hambatan pada motor. Masalah ini menyebabkan penurunan daya angkat. Hasil studi ini diwujudkan dalam desain purwa rupa dari model kendaraan udara jenis VTOL yang berhasil diuji penerbangan. Kata kunci: VTOL, hover, contra rotating, motor dc brushless, inersia I. PENGENALAN Penggunaan teknologi VFO pada Amimorphtorch benar-benar sukses bila Amimorphtorch memiliki kemampuan lepas landas dan mendarat secara vertikal sekaligus melayang mandiri. Salah satu cara untuk memenuhi persyaratan ini berada pada rancang bangun dari sayap putarnya, telah dikembangkan dalam beberapa tahun terakhir. Namun, sayap putar ini sangat sensitif terhadap turbulensi udara yang dihasilkan oleh rotor. Selain itu, sayap putar ini memiliki jangkauan, daya tahan, dan kapasitas payload yang lebih kecil jika dibandingkan dengan pesawat sayap tetap. Teori mengenai rancang bangun dari sayap putar dan prinsipnya untuk model pesawat VTOL telah berkembang dan diringkas dalam literatur dengan baik. Teori VTOL yang sedang berkembang saat ini, fokus pada masalah sistem propulsi, pengembangan untuk baling-baling beserta rotor dan pengendalian selama melayang-layang. Secara keseluruhan, ada pengetahuan yang cukup relevan untuk mulai mengeksplorasi konsep VTOL dengan aplikasi untuk VFO khususnya Amimorphtorch. Dalam studi ini, kami memulai sebuah proyek penelitian tentang VFO Amimorphtorch sayap delta tetap yang mampu lepas landas dan medarat secara tegak lurus sekaligus melayanglayang. Jelas, dengan menambahkan kemampuan melayang-layang untuk pesawat ini membutuhkan daya motor tambahan. Selain itu proyek akhir ini juga mengambil studi eksperimental independen dari konsep "Vertigo" dikembangkan di SUPAERO.4 The Vertigo terdiri dari sayap delta tetap dengan daya dari rotor dan baling-baling. Kemampuan untuk melayang-layang ditunjukkan pada purwa rupa radio kontrol. Aerobatic pesawat RC tunggal-baling muncul sebagai akibat dari integrasi perkembangan terbaru dalam motor listrik dan teknologi baterai ke dalam struktur yang lebih ringan. Dengan rasio gaya dorong yang tinggi terhadap berat dan besar pesawat ini, dapat melakukan lepas landas, mendarat dan melayang-layang. Namun, beban sayap sangat rendah, sehingga kecepatan terbangpun juga rendah. Secara umum, perancangan suatu sayap putar berbaling-baling tunggal VFO Amimorphtorch sebagian besar dipengaruhi oleh beberapa hal seperti berikut: torsi balingbaling, swirling slipstream, dan gyroscopic. Torsi baling-baling yang muncul sebagai kecenderungan rolling kiri, adalah sebuah kelemahan serius dalam pesawat berbaling- baling tunggal. Biasanya lebar sayap pesawat aerobatic lebih besar dari 1 m, yang membatasi tingkat torsi roll maksimum dengan sekitar 180 º per detik, memungkinkan seorang pilot berpengalaman untuk mengendalikan pesawat. Ukuran maksimum untuk VFO Amimorphtorch adalah 3-5 kali lebih kecil. Dengan asumsi bahwa tingkat torsi roll berbanding terbalik dengan kuadrat rentang sayap, jika dengan lebar sayap dari VFO Amimorphtorch berkurang dengan meningkatkan torsi roll. Dengan demikian, torsi roll bisa menjadi faktor pendorong dalam merancang sistem kontrol untuk VTOL VFO Amimorphtorch. Hal lain yang menjadi dampak negatif pada pesawat berbaling- baling tunggal adalah faktor yang terjadi sebagai akibat dari perbedaan angle of attack antara bilah perputaran baling-baling yang menyebabkan baling-baling berotor tunggal tersebut untuk yaw ke kiri. Membantu menjaga kemudi yaw ke kanan untuk mempertahankan penerbangan. Efek dari rotasi, aliran udara melekat pada sistem propulsi berbaling-baling tunggal. Udara tersebut memutar helix dan menekan sekitar pesawat di sisi kiri ventral ekor vertikal, menyebabkan pesawat ke yaw dan roll ke kiri. Hal ini juga menyebabkan hilangnya energi sehingga mengurangi efisiensi keseluruhan daya dorong propulsi ini. Untuk mengatasi hal tersebut maka dalam tubuh VTOL VFO Amimorphtorch dipasang empat sayap yang mampu membalik aliran putaran dari rotor setelah berputar. Dimana aliran udara keluar dari contra-rotating empat sayap simetris. Hal ini menyebabkan VFO Amimorphtorch mampu melayang-layang stabil. II. PERANCANGAN SISTEM Perancangan mekanik model pesawat terbang Amimorphtorch dimulai dari sayap ganda, elevon, dan satu motor beserta balingbalingnya. Bentuk dari model pesawat terbang Amimorphtorch ditunjukkan pada Gambar 2.1. Badan Kemudi2 Sayap Kemudi1 Gambar 2.1: VTOL Amimorphtorch Pada gambar diatas nampak jelas bahwa model ini memiliki badan yang bentuknya sama dengan sayap. Hal ini dilakukan agar bentuk dari model pesawat terbang ini kelihatan simetris dan sederhana. VTOL Amimorphtorch ini dibagi menjadi tiga bagian. Bagian-bagian itu ditunjukkan pada Gambar 2.2. Atas Tengah Bawah Gambar 2.2: Bagian-bagian dari VTOL Amimorphtorch Nampak jelas pada gambar diatas bahwa model ini dibagi menjadi tiga bagian. Bagian itu adalah atas, tengah dan bawah. Bagian atas hanya ditempati oleh motor dan baling-baling, bagian tengah ditempati oleh sensor dan rangkaian elektronika, dan bagian bawah ditempati oleh empat buah motor servo, dan baterai. Mengenai detail dimana peralatan itu diletakkan akan ditunjukkan pada Gambar 2.3. Baling-baling Gyro Minsys Motor Accelero Baterai Servo Gambar 2.3: Letak peralatan Peletakan peralatan seperti memiliki alasan tertentu. Sensor gyro diletakkan di pusat badan agar sensor gyro lebih cepat mendeteksi perputaran dan kemiringan dari model pesawat terbang tersebut. Semakin cepat sensor tersebut mendeteksi perputaran dan kemiringan maka errornya akan segera diminimalkan sehingga membuat model akan cepat stabil. Selanjutnya baterai diletakkan di bawah mendekati tanah karena baterai memiliki berat yang lebih dibandingkan alat yang lain. Berat beban yang menempel pada model pesawat terbang sangat mempengaruhi kestabilan model maka dari itu apabila baterai ini diletakkan jauh sekali dari tanah hasilnya model tersebut sulit sekali untuk distabilkan. Selain itu baik rangkaian elektronik maupun baterai diletakkan pada badan model pesawat terbang karena apabila benda itu diletakkan pada sayap maka model akan mengalami kesulitan yang cukup signifikan untuk lepas landas, terbang maupun mendarat. Mengenai bentuk dan ukuran sayap dari model pesawat terbang Amimorphtorch akan dibahas di bawah ini. Amimorphtorch adalah nama dari model pesawat terbang namun model ini masih tergolong dalam VTOL VFO. Amimorphtorch mengadopsi jenis sayap flat plate dengan model sayap delta. Sayap delta adalah sayap yang berbentuk segitiga dengan aspec ratio tertentu. Selain itu sayap delta ini juga dikenal sebagai tubuh sayap karena memiliki permukaan yang besar dan cukup untuk menggantikan badan dari sebuah model pesawat terbang. Sayap delta ini sangat sederhana, mudah sekali untuk dibuat, selain tidak ada aturan yang begitu mengikat untuk pembuatan sayap, sayap ini juga mendukung untuk model pesawat terbang dengan kecepatan tinggi. Dari kelebihankelebihan yang dimiliki oleh sayap delta sehingga banyak dari model pesawat terbang mengadopsi model ini sebagai sayapnya. Langkah pertama dalam membuat sayap delta untuk model pesawat terbang jenis VTOL Amimorphtorch adalah menentukan luas sayap dengan ketentuan di bawah ini. 1. Beban = 1000gram 2. Ukuran Gabus= 6oz/sq kaki (0.25gram/cm2). Setelah ditentukan komponen tersebut maka luas sayap dapat dihitung menggunakan rumus dari paper sepideh 2007. Keterangan: S = wing area W/S = wing loading W = beban (cm2) (cm2/gram) (gram) Keterangan: B = wing chord AR = aspect ratio S = wing area (cm) (1-4) (cm2) Keterangan: B = wing chord Q = length S = wing area (cm) (cm) (cm2) Dari rumus diatas diperoleh bahwa luas sayap sebesar 4000 cm2 dengan panjang 80 cm dan lebar 50 cm menggunakan aspect ratio 1.6. Sebenarnya sayap delta berbentuk segitiga berhubung dengan adanya pemasangan motor sekaligus kemudinya maka panjang sayap dikurangi sebesar 14 cm menjadi 66 cm dan lebar sayap berkurang 20 cm menjadi 30 cm. Jadi luas sayap tidak lagi 4000 cm2 namun menjadi 1980 cm2 menggunakan aspect ratio 1.65. Besar nilai error untuk sayapnya adalah 5%. Dimensi dari sayap model pesawat terbang Amimorphtorch ditunjukkan pada Gambar 2.4. 40 cm 66 cm 30 cm 60 cm Gambar 2.4: Dimensi dari Model Pesawat Terbang Amimorphtorch Penentuan kelayakan dari sayap yang akan dipakai pada model pesawat terbang jenis VTOL “Amimorphtorch” menggunakan perangkat lunak buatan NASA yang ditunjukkan pada Gambar 2.5. Gambar 2.5: Kelayakan sayap Sayap ini layak dipakai untuk terbang karena nilai lift lebih besar daripada drag sesuai dengan yang ditunjukkan pada subbab 2.11. Model pesawat terbang jenis VTOL “Amimorphtorch” ini memiliki berat take-off W = 1 N, lebar sayap 30 cm, luas sayap S0 = 1320 cm2. Untuk memenuhi kebutuhan ini sebuah baterai 3-cell lithium-polimer berkapasitas 2100 mAh dipilih sebagai sumber listrik. Dua sirip dengan luas total 180 cm2 memberikan stabilisasi pada model pesawat terbang jenis VTOL “Amimorphtorch” ini baik pada roll dan yaw. Rudder yang terdiri dari dua bagian dengan luas total 180 cm2 terpasang pada sirip. Elevon yang terdiri dari dua bagian dengan luas total 180 cm2 digunakan untuk mengendalikan kendaraan pada pitch dan roll. Sistem contra rotating untuk model pesawat terbang jenis VTOL “Amimorphtorch” dengan baling-baling tunggal dibuat mengikuti sensor gyro dimana data dari sensor gyro yaw dibaca oleh Microcontroller kemudian data tersebut diolah dan dikeluarkan ke kedua motor servo sehingga pada saat badan model pesawat terbang jenis VTOL “Amimorphtorch” ini berputar berlawanan arah dari arah putaran baling-baling maka posisi elevon ditunjukkan pada Gambar 2.6. Putaran Rotor Dari gambar diatas menjelaskan bahwa baling-baling dengan diameter 10 inch atau sama dengan 25,4 cm mampu menghasilkan gaya angkat maksimal sebesar 1,28kg sesuai dengan gaya angkat yang dibutuhkan. Dalam proses pembuatan mekanika ini menggunakan beberapa peralatan seperti bor, silet, penggaris. Berikut adalah Gambar 2.9 yang menunjukkan bentuk dari model pesawat terbang jenis VTOL “Amimorphtorch” dengan baling-baling tunggal yang telah dibuat untuk keseluruhan eksperimen. Reaksi Elevon Aliran udara Elevon Gambar 2.9: Keseluruhan model pesawat terbang VTOL “Amimorphtorch” Gambar 2.6. Gerakan Elevon Gaya angkat dari model pesawat ini ditentukan dari dimensi baling-baling dan motor brushless yang digunakan. Baling-baling yang digunakan jenis APC ditunjukkan pada Gambar 2.7. 25.4 cm 1 cm Perancangan pengendali dibuat dalam kendali otomatis. Kendali otomatis ditujukan untuk membantu menstabilkan model pesawat terbang jenis VTOL “Amimorphtorch” dari efek inersia motor dc brushless yang menyebabkan yaw kiri. Desain kendali penuh dapat dilihat pada Gambar 2.10. Height Reference + Gambar 2.7: Baling-baling yang digunakan Baling-baling yang digunakan memiliki diameter 25,4 cm dan lebar untuk poros motor sebesar 1cm. Dengan dimensi yang dimiliki baling-baling dapat ditentukan besar gaya angkat yang dihasilkan dengan menggunakan perangkat lunak static thrust calculator buatan Szabolcs Füzesi yang ditunjukkan pada Gambar 2.8. Gambar 2.8: Hasil dari Static Thrust Calculator X Aviation Control Controller Gyro Sensor X PWM Gambar 2.10: Rancang Pengendali Otomatis untuk kestabilan pada Model Pesawat Terbang Jenis VTOL “Amimorphtorch” Jika diteliti lebih dalam, kendali otomatis menggunakan sensor gyro. Fungsi sensor gyro dalam kendali otomatis yaitu untuk mengetahui kondisi dan sudut kemiringan dari model pesawat terbang jenis VTOL “Amimorphtorch”. Penerima data untuk model pesawat terbang jenis VTOL “Amimorphtorch” ini berupa perangkat lunak. Penerima data ini menggunakan form dari perangkat lunak visual basic 6.0. Penerima data ini menggunakan laptop sebagai host. Tujuan pembuatan penerima data ini adalah untuk menerima, menampilkan, dan menyimpan data yang dikirimkan oleh model pesawat terbang jenis VTOL “Amimorphtorch”. Gambar 2.11 menunjukkan flowchart dari perangkat lunak yang digunakan untuk menerima, menampilkan dan menyimpan data dari model pesawat terbang jenis VTOL “Amimorphtorch”. Mulai T Apakah “MULAI” di tekan? Y Menerima dan menampilkan data Gambar 2.12: Bentuk perangkat lunak penerima data T Apakah “KELUAR” di tekan? Y Menyimpan dan keluar Berhenti Gambar 2.11: Flowchart dari perangkat lunak Gambar 2.11 diatas menunjukkan bahwa ketika sistem mulai aktif maka perangkat lunak akan memeriksa tombol “MULAI” jika tombol “MULAI” telah ditekan maka proses akan berlanjut pada menerima dan menampilkan data bila tidak maka proses akan kembali sampai menunggu tombol “MULAI” ditekan. Setelah perangkat lunak menerima dan menampilkan data maka perangkat lunak tersebut akan memeriksa tombol “KELUAR” jika tombol “KELUAR” ditekan maka data yang diterima dan ditampilkan tersebut akan disimpan ke dalam perangkat lunak notepad bila tidak maka proses akan kembali menerima dan menampilkan data. Bentuk implementasi dari flowchart perangkat lunak penyimpan data dari model pesawat terbang jenis VTOL “Amimorphtorch” ditunjukkan pada Gambar 2.12. Dari gambar diatas dapat dijelaskan bahwa perangkat lunak tersebut menerima data dari data yang telah dikirimkan oleh model pesawat terbang jenis VTOL “Amimorphtorch” melalui komunikasi YS1020UB. Komunikasi antara YS1020UB yang berada pada model pesawat terbang jenis VTOL “Amimorphtorch” dengan YS1020UB yang berada di laptop menggunakan USART yang dikonversi ke interface RS232 menggunakan IC MAX232. Jumlah data yang diterima sebanyak delapan jenis data yaitu AccX, AccY, AccZ, GyroX, GyroY, GyroZ, Njarak, dan Gas. Namun fokus pada proyek akhir ini ada lima data yang akan disimpan. Kelima data itu adalah GyroX dengan satuan persen, GyroY dengan satuan persen, GyroZ dengan satuan persen, Njarak dengan satuan sentimeter, dan Gass dengan satuan persen. Kelima data tersebut dikirim dari YS1020UB pada model pesawat terbang jenis VTOL “Amimorphtorch” kemudian diterima YS1020UB pada laptop dan dipisahkan menggunakan karakter ‘S’ kemudian pada perangkat lunak data tersebut ditampilkan. Selain itu handshaking diperlukan agar data dikirim dan diterima sesuai sehingga pemrosesan lebih lanjut bisa berjalan dengan baik. Pemisahan data ditunjukkan pada program di bawah ini. Program diatas menejalaskan bahwa penerima data mengirimkan karakter ‘s’ kemudian pada sisi ATMEGA32 menerima karakter ‘s’ maka ATMEGA32 akan mengirimkan data. Selain itu gambar diatas juga menjelaskan bahwa data tersebut akan disimpan dengan menggunakan notepad pada sebuah folder satu dengan folder dari perangkat lunak ini. III. PENGUJIAN Grafik Gyro Saat Terbang 2 Setelah dinyalakan dan model pesawat terbang Amimorphtorch lepas landas kemudian model pesawat terbang itu mengirimkan data ke penerima 433MHz yang terhubung dengan laptop dan diperoleh data seperti pada Tabel 1. Gx (%) 65 65 65 … 64 64 64 … 64 64 64 64 64 64 64 64 64 64 64 64 62 58 64 65 65 65 Gyro Gy Gz (%) (%) 65 65 65 65 65 65 … … 63 67 61 67 61 68 … … 62 67 62 67 62 67 62 67 62 67 62 67 62 67 62 67 62 67 62 67 62 67 62 67 58 66 66 69 65 65 65 65 65 65 65 65 Gass (%) H (cm) Posisi 30 30 30 … 43 43 48 … 100 100 100 100 100 100 100 100 100 98 98 98 98 98 44 30 30 30 3 3 3 … 32 32 35 … 481 481 481 481 481 481 481 145 145 145 145 145 145 33 3 3 3 3 Mendarat Mendarat Mendarat … Terbang Terbang Terbang … Terbang Terbang Terbang Terbang Terbang Terbang Terbang Terbang Terbang Terbang Terbang Terbang Terbang Terbang Mendarat Mendarat Mendarat Mendarat Tabel diatas menunjukkan tentang keadaan gyro pada saat model pesawat terbang jenis VTOL “Amimorphtorch” terbang dimana pada saat terbang data PWM ketiga gyro yang keluar sama sekali tidak stabil yaitu sekitar 1,48 sampai 1,55 ms. Setelah mencapai ketinggian 481 cm data PWM ketiga gyro yang keluar stabil dan tidak berubah-ubah yaitu Gx sama dengan 1,48, Gy sama dengan 1,44, dan Gz sama dengan 2.31. Plot dari tabel 4.7 ditunjukkan pada Grafik 1. 1 Gx 0.5 Gy Gz 481 481 481 481 481 481 131 136 122 116 84 105 78 72 59 60 59 58 Gyro(ms) Cycle 0 Duty Tabel 1. Data yang dihasilkan dari Amimorphtorch 1.5 Ketinggian H(cm) Grafik 1: Grafik Gyro Saat Terbang Grafik diatas menggambarkan bahwa sistem pada model pesawat terbang jenis VTOL “Amimorphtorch” mengalami vibrasi menjadi linier dan stabil ketika model pesawat terbang jenis VTOL “Amimorphtorch” terbang mencapai ketinggian 481 cm hingga mendarat pada ketinggian 3 cm. IV. KESIMPULAN Mengatasi yaw kiri yang diakibatkan oleh inersia dari motor dc brushless dapat diwujudkan dengan memasang sensor gyro pada posisi yaw di elevon untuk mendeteksi yaw kiri yang diakibatkan oleh motor DC Brushless sehingga yaw kiri ini dapat dikurangi meskipun tidak sampai 100%. Yaw kiri ini berhasil dikoreksi oleh sistem dari model pesawat terbang jenis VTOL “Amimorphtorch” pada ketinggian 145 sampai 481 cm dengan data output PWM gyrox sebesar 64%, gyroy sebesar 62%, dan gyroz sebesar 67% menghasilkan sudut kemiringan dari gyrox sebesar -10, gyroy sebesar -30, dan gyroz sebesar 20. V. DAFTAR PUSTAKA Sepideh, A. (2007). MAV: Design and Fabrication of a Delta Wing Micro Aerial Vehicle. Portlock, J. (2005). QTAR: Quad Thrust Aerial Robot 2005 Video. Perth. Talay, T.A. (1975). Introduction to the Aerodynamics of Flight. Scientific and Technical Information Office. NASA, Washington, D.C. Talay, T.A. (2000). Introduction to the Aerodynamics of Flight. Scientific and Technical Information Office. NASA, Washington, D.C. Moschetta, J-M. and Bataille, B. (2007). Aerodynamic Design of VTOL Micro Air Vehicles. 3rdUS-European Comt\petition and Workshop on Micro Air Vehicle System (MAV07) & European Micro Air Vehicle Conference and Flight Competition (EMAV2007), 17-21 September 2007, Toulouse, France.