paper TA - Politeknik Elektronika Negeri Surabaya
advertisement

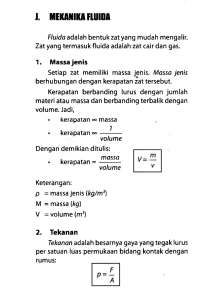
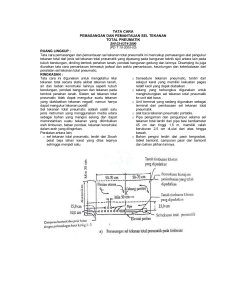
RANCANG BANGUN SISTEM AIR BEARING SEBAGAI ALAT UJI PERGARAKAN TIGA AXIS PADA PROTOTYPE NANO SATELLITE Zainul Arifin1, Bambang Sumantri2, Nu Rhahida Arini2 Penulis, Mahasiswa Jurusan Teknik Elektronika PENS - ITS 2 Dosen Pembimbing, Staf Pengajar di Jurusan Teknik Elektronika PENS - ITS Politeknik Elektronika Negeri Surabaya Electronics Engineering Polytechnic Institute of Surabaya Institut Teknologi Sepuluh Nopember Surabaya Kampus ITS Sukolilo, Surabaya 60111, INDONESIA email : [email protected] [email protected] [email protected] 1 Abstrak— Satelit adalah benda yang mengorbit benda lain dengan periode revolusi dan rotasi tertentu. Satellite menurut ukuranya dibagi menjadi beberapa bagian salah satunya adalah nano-satellite. Projek ini berjudul ”Rancang bangun pergerakan tiga axis pada simulator nano satellite menggunakan sistem air bearing”, nano satellite adalah satellite yang mempunyai masa yang berkisar antara 10 kg- 30 kg, sedangkan sistem air bearing adalah sistem yang menggunakan peran udara dalam kerjanya. Pada projek ini di maksudkan untuk mengatur posisi suatu piringan yang bertujuan sebagai simulasi pergerakan satellite sewaktu berada pada tempat yang hampa udara, Hal ini digunakan untuk mengatur, dan melakukan tes pada sifat udara terhadap benda, aktuator, dan algoritma pada kerangka eksperimental. sensor tekanan yang berfungsi sebagai penyetabilan udara yang menuju spherical bearing, sedangkan dalam pengaturan katupnya di jalankan oleh motor yang di control menggunakan microcontroller hal ini di maksudkan agar udara yang masuk ke spherical bearing tetap (stabil) dan pergerakan bendapun teratur . Sebuah computer digunakan untuk memprogram, dengan tujuan untuk mangatur sikap dan control pergarakan yang biasanya menggunakan Code Vision AVR. Pendahuluan Perkembangan teknologi yang cukup pesat membuat manusia terus berupaya untuk menciptakan alat-alat dengan temuan terbaru, nano satelit merupakan alat yang berperan penting dalam teknologi informasi dan komunikasi, baik dalam lingkup nasional maupun internasional, dimana di semua pergerakan sudutnya berperan penting pada keakuratan informasi yang dia dapat. Sistem ADCS (Atittude Determination and control system) yaitu sub sistem dalam satellite yang berfungsi untuk mengetahui dan mengontrol perilaku satellite. Untuk dapat mengembangkan sub sistem ini, di perlukan beberapa peralatan percobaan satu dintaranya adalah ”Alat Uji Tiga Axis dengan Sistem Air Bearing “. alat ini di gunakan untuk mensimulasikan kondisi satellite yang melayang diangkasa dengan gaya gesekan yang mendekati nol (0).prinsip kerja dari alat ini adalah bagaimana kita dapat mengangkat sebuah benda dengan masa tertentu dengan memberikan gaya keatas daru aliran udara dengan tekanan dan aliran tertentu. I. DASAR TEORI Pada bab ini dibahas mengenai dasar-dasar teori yang berhubungan dengan mekanik, udara dan sensor tekanan. 2.1. State of Art: Sistem Bantalan Udara (Air Bearing System) Sistem bantalan udara banyak digunakan karena rugirugi yang disebabkan oleh gaya gaya gesek sangat kecil. Sistem ini banyak digunakan pada aplikasi pengaturan posisi yang presisi dan juga pada sistem pengaturan putaran yang memerlukan kecepatan tinggi. Prinsip kerja sistem bantalan udara ini adalah dengan cara mengalirkan udara dengan Kata kunci : satellite, Air Bearing, microcontroller, spherical bearing 1 tekanan tertentu dari sumber eksternal ke atmosfer melalui permukaan dua sistem bantalan sehingga akan terbentuk lapisan udara diantara permukaan kedua bantalan tersebut yang berfungsi sebagai pelumas, seperti ditunjukkan pada gambar 1. Gambar 2. Bentuk standard sistem bantalan udara dengan bentuk bola (Meissner, 2009) Pada model tabletop, komponen ADCS yang diuji diletakkan diatas meja. Sedangkan model umbrella didesain agar pusat massa dari sistem berada dekat pada pusat rotasi dengan cara meletakkan komponen ADCS yang diuji menggantung di bawah umbrella. Model dumbbell didesain untuk mengurangi interferensi dari struktur dengan cara meletakkan komponen yang diuji menjauhi titik pusat rotasi. Pada tahun 2007, California State Polytechnic Institute (Cal Poly) telah membuat alat uji pergerakan tiga aksis dengan menggunakan spherical air bearing (Mittelsteadt and Mehiel, 2007). Alat uji ini mampu menguji satelit untuk berputar pada sumbu-z sebesar 360°, pada sumbu-x dan y sebesar ±30°. Virginia Polytechnic Institute and State University juga mengembangkan alat uji pergerakan tiga aksis dengan menggunakan spherical air bearing. Alat uji yang mereka kembangkan menggunakan model dumbbell seperti terlihat pada gambar 3. Pada tahun 2003, Georgia Institute of Technology (GIT) telah mengembangkan alat uji pergerakan tiga aksis dengan menggunakan spherical air bearing yang memiliki kemampuan untuk menguji sistem ADCS dengan berat sampai dengan 136 kg . Gambar 1. Sistem bantalan udara Newport Corporation telah mengembangkan sistem bantalan udara untuk sistem pergerakan satu axis dan dua axis (Newport corporation, 2011). Sistem ini digunakan pada peralatan untuk mengetest dan proses fabrikasi peralatan semikonduktor yang memerlukan kepresisian tinggi. Pada penelitian dan pengembangan sistem satelit khususnya nano satelit, ketersedian peralatan dan fasilatas untuk melakukan testing unjuk kerja subsistem-subsistem ini harus tersedia dengan memperhatikan kondisi lingkungan dimana satelit ini mengorbit. Pada pengembangan subsistem ADCS yang berfungsi untuk mengatur perilaku satelit di orbitnya, maka alat uji harus dibuat dengan memperhatikan perilaku satelit di orbitnya dimana satelit dapat melayang bebas diruang angkasa dengan gangguan yang disebabkan gesekan mendekati nol. Pada orbitnya, satelit dapat bergerak bebas pada tiga aksisnya yaitu roll, pitch dan yaw. Untuk dapat menguji subsistem ADCS ini, maka harus tersedia alat uji pergerakan tiga aksis dengan gaya gesek yang kecil sehingga menyerupai keadaan saat satelit berada pada orbitnya. Saat ini alat uji yang banyak digunakan adalah alat uji yang menggunakan prinsip bantalan udara. Salah satu alat uji yang pergerakan tiga aksis untuk menguji perilaku satelit pertama kali dibuat oleh NASA pada tahun 1959 (Schwartz, Peck and Hall, 2003). Schwartz dkk. melakukan review tentang perkembangan penggunaan alat uji pergerakan tiga aksis dengan menggunakan bantalan udara dengan bentuk bola (spherical air bearing). Terdapat tiga macam tipe dasar alat yang telah dikembangkan, yaitu tabletop (gambar 2.a.), umbrella (gambar 2.b.), dumbbell (gambar 2.c.). Gambar 3. Alat uji pergerakan tiga aksis dengan menggunakan spherical air bearing yang dikembangkan Virginia Polytechnic Institute and State University (Smith, 1964) 2 didesain untuk mengendalikan besarnya tekanan udara yang diberikan. a b Gambar 2.5. Spherical Bearing(a. Mangkok, b. ¾ Bola) . A. MIKROKONTROLER ATMEGA 16 Mikrokontroller adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus. Pada sebenarnya dasarnya, hanya cara membaca kerja mikrokontroller dan menulis data. Mikrokontroller merupakan komputer di dalam chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektivitas biaya. AVR merupakan seri mikrokontroler CMOS 8-bit Gambar 4. Alat uji pergerakan tiga aksis dengan menggunakan spherical air bearing yang dikembangkan GIT (Jung and Tsiotras, 2003) buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general- 2.1 Sistem Aliran Udara Prinsip kerja spherical air bearing system adalah dengan mengalirkan udara bertekanan pada kedua permukaan bantalan yang berbentuk mangkok dan bola seperti pada gambar 2.2. Besarnya tekanan udara yang diberikan ini tergantung pada beban yang diuji serta luas outlet udara yang keluar. Untuk menentukan berapa tekanan yang di perlukan, berapa luas pemukaan yang harus di buat, dan berapa beban maksimum yang akan diuji, dengan menggunakan teori tekanan yang diartikan sebagai gaya persatuan luas dimana arah gaya tegak lurus dengan luas permukaan, yaitu: purpose, timer/counter fleksibel dengan mode compare, interrupt internal dan eksternal, serial UART, programmable Watchdog Timer, dan mode power saving, ADC dan PWM internal. AVR juga mempunyai In-System Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI. ۴ ࡼ = ..............................................................................................(2.1) ۯ Dimana P (Pascal) adalah tekanan udara yang harus diberikan untuk mengangkat beban sebesar F (Newton) yang dialirkan melalui outlet dengan luasan A (m2). Tekanan udara yang mengalir pada outlet spherical air bearing system ini harus dibuat konstan agar benda uji dapat tetap melayang. Sehingga sebuah algoritma sistem kendali harus Gambar 4. Mikrokontroler ATMega 16 3 Satuan gaya (F) adalah Newton (N), satuan A. CODEVISION AVR CodeVision AVR adalah suatu C cross-compiler, yang mengembangkan pada integrasi external dan program generator otomatis yang dirancang untuk keluarga ATMEL AVR Microcontrollers. Aplikasinya dirancang untuk dapat bekerja di Windows 95, 98, NT 4, 2000 dan XP sistem operasi. Implementasi C cross-compiler hampir semuanya unsur-unsurnya menggunakan bahasa C, seperti diijinkan oleh arsitektur AVR, dengan beberapa fasilitas yang ditambahkan untuk keunggulan dari spesifikasi dari AVR dan juga beberapa tambahan fasilitas pada sistem embedded yang diperlukan. Pada Codevision AVR terdapat perangkat lunak untuk built-in pada Program AVR Chip In-System yang memungkinkan untuk transfer data secara otomatis ke mikrokontroler. a. luas adalah meter persegi (m2). Karena tekanan adalah gaya per satuan luas maka satuan tekanan adalah N/m2. Nama lain dari N/m2 adalah pascal (Pa). Pascal dipakai sebagai satuan Tekanan penemunya bernama Blaise Pascal. Kita akan berkenalan lebih dalam dengan om Pascal pada pokok bahasan Prinsip Pascal. Tekanan(P) memiliki perbandingan terbalik terhadap luas permukaan (A), semakin besar luas permukaan maka akan semakin kecil tekanan begitu pula sebaliknya, semakin kecil luas pemukaan maka BAB III semakin besar tekanan yang di hasilkan. Perhitungan PERENCANAAN SISTEM di atas di peroleh dari rumus tekanan jika bidang dalam keadaan tegak lurus. Desain Mekanik Di umpamakan : Tekanan diartikan sebagai gaya persatuan luas dimana arah gaya tegak lurus dengan luas permukaan. 1 bar = 14.5 Psi Tekanan dan luas penampang itu berbanding terbalik, ݉ = 10 ݇݃ Semakin besar luas permukaan (A) maka akan semakin kecil ݃ = 9.8 tekan brgitu pula sebaliknya. = ݎ1 ܿ݉ = 1ݔ10ିଶ m ݈ ݎߨ = ݊ܽݎ݈ܽ݇݃݊݅ ݏܽݑଶ Sensor tekanan = ܣ3.14 ( ݔ10ିଶ )² = ܨP. A ݉. ݃ = P. A Udara didalam pipa 10 ݇݃ ݔ9.8 = P ( ݔ3.14 ݔ10ିଶ )² 98 = P ( ݔ3.14 ݔ10ିସ ) ܲ= Udara Dari kompressor ଽ଼ ଷ.ଵସ ௫ ଵషర ܲ = 31.2 ݔ10ସ ܰൗ݉ଶ = 3.12 = ݎܽܤ45.24 Psi Jadi tekanan yang di butuhkan untuk mengangkat Gambar 5. Simulasi masuknya udara kedalam pipa beban 10 kg, dengan luas permukaan (A)=2 cm² adalah 45.24 Psi Pada mekanik diatas didasarkan oleh rumus berikut : ܲ= Tekanan(P) memiliki perbandingan terbalik terhadap luas permukaan (A), semakin besar luas permukaan = ܨP. A maka akan semakin kecil tekanan begitu pula P = tekanan sebaliknya, semakin kecil luas pemukaan maka F = gaya semakin besar tekanan yang di hasilkan. A = luas permukaan. Perhitungan di atas di peroleh dari rumus tekanan jika bidang dalam keadaan tegak lurus. 4 clock. Sistem minimum (sismin) mikrokontroler Untuk menghasilkan udara dengan aliran dan tekanan yang teratur, maka diperlukan peralatan adalah rangkaian elektronik minimum yang antara lain: diperlukan untuk beroperasinya IC mikrokontroler. Sismin ini kemudian bisa dihubungkan dengan a. Sensor tekanan Sensor ini rangkaian lain untuk menjalankan fungsi tertentu. digunakan untuk membaca Di keluarga mikrokontroler AVR atmega 16 adalah besarnya tekanan udara yang diberikan kepada sistem salah satu seri yang sangat banyak digunakan. bantalan udara sehingga besarnya tekanan dapat Arsitektur ATMega16 dikendalikan. * Saluran IO sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D * ADC 10 bit sebanyak 8 Channel * Tiga buah timer / counter * 32 register * Watchdog Timer dengan oscilator internal * SRAM sebanyak 512 byte * Memori Flash sebesar 8 kb * Sumber Interrupt internal dan eksternal Gambar 6. Sensor Tekanan[3] Sensor inilah mikrokontroller yang yang * Port SPI (Serial Pheriperal Interface) dihubungkan kemudian * EEPROM on board sebanyak 512 byte dari *Komparator analog microcontroller akan di tampilkan melalui LCD. * Port USART (Universal Shynchronous Pada lcd ini nilai tekanan akan terbaca jika tekanan Ashynchronous Receiver Transmitter) nilainya kurang atau lebih maka sensor tekanan akan mengirim instruksi ke microcontroller Konfigurasi Pin ATMega16 sehingga microcontroller mengatur pergerakan VCC merupakan Pin yang berfungsi sebagai motor, dan pada motor inilah yang fungsinya pin masukan catudaya menggerakan katup sehingga inputan udara dapat GND merupakan Pin Ground di atur sesuai tekanan yang dibutuhkan untuk Port A (PA0…PA7) merupakan pin I/O dan mengangkat benda. b. pin masukan ADC Pembuatan Perangkat Lunak Port B (PB0…PB7) merupakan pin I/O dan Mikrokontroler adalah suatu keping IC pin yang mempunyai fungsi khusus yait dimana terdapat mikroprosesor dan memori Timer/Counter, komparator Analog dan SPI program (ROM) serta memori serbaguna (RAM). Port C (PC0…PC7) merupakan port I/O dan Mikrokontroler AVR (Alf and Vegard’s Risc pin yang mempunyai fungsi khusus, yaitu prosesor) memiliki arsitektur RISC 8 bit, di mana komparator analog dan Timer Oscillator semua instruksi dikemas dalam kode 16-bit (16-bits Port D (PD0…PD1) merupakan port I/O dan word) dan sebagian besar instruksi dieksekusi pin fungsi khusus yaitu komparator analog dan dalam 1 (satu) siklus clock, berbeda dengan interrupt eksternal serta komunikasi serial instruksi MCS 51 yang membutuhkan 12 siklus 5 RESET merupakan pin yang digunakan untuk Actuator mereset mikrokontroler adalah penggerak, dan dalam hal ini pengeraknya adalah motor adapaun rangakaian driver XTAL1 dan XTAL2 merupakan pin masukan motor tersebut dapat dilihat dibawah ini : clock eksternal AVCC merupakan pin masukan untuk tegangan ADC AREF merupakan pin masukan tegangan referensi untuk ADC Untuk membuat rangkaian system minimum Atmega16 diperlukan beberapa komponen yaitu: 1. IC mikrokontroler ATmega16 2. 1 XTAL 11.592 MHz atau 12 MHz (XTAL1) 3. 3 kapasitor kertas yaitu dua 22 pF (C2 dan Gambar 8. Rangkaian driver C3) serta 100 nF (C4) 4. 1 kapasitor elektrolit 4.7 uF (C12) 2 resistor Cara kerja driver dijelaskan dari table dibawah ini : yaitu 100 ohm (R1) dan 10 Kohm (R3), push button Input Untuk rangkaian control kita menggnunakan A B C D minimum system yang skematiknya bias dilihat dilih 1 1 0 0 0 0 1 1 0 0 0 0 dibawah ini : U? VCC 1 2 3 4 5 6 7 8 R? 1K C? Cap 100 F 14 15 16 17 18 19 20 21 GND 9 12 13 C? PD0 PD1 PD2 PD3 PD4 PD5 PD6 PD7 (XCK/T0) (T1) (AIN0/INT2) (AIN1/OC0) (SS) (MOSI) (MISO) (SCK) (RXD) (TXD) (INT0) (INT1) (OC1B) (OC1A) (ICP) (OC2) PA0 PA1 PA2 PA3 PA4 PA5 PA6 PA7 (ADC0) (ADC1) (ADC2) (ADC3) (ADC4) (ADC5) (ADC6) (ADC7) PC0 (SCL) PC1 (SDA) PC2 (TCK) PC3 (TMS) PC4 (TDO) PC5 (TDI) PC6 (TOSC1) PC7 (TOSC2) VCC AVCC AREF RESET XTAL2 XTAL1 GND GND 40 39 38 37 36 35 34 33 22 23 24 25 26 27 28 29 X XTAL Motor berputar CW Motor berputar CCW Motor 10 30 32 31 11 Tabel 1. Simulasi kerja driver GND ATmega16-16PI 2 1 Cap 22pF C? PB0 PB1 PB2 PB3 PB4 PB5 PB6 PB7 U? VCC 1 IN GND OUT 3 GND Cap 22pF C? Cap 100pF 7805 2 S? SW-PB Kondisi motor C? Cap 100pF Jika A dan B aktif maka motor berputar CW. GND Gambar 7. Rangkaian minimum system dan kofigurasi pin Jika C dan D aktif maka motor berputar CCW. Jika tidak ada sinyal input yang aktik maka motor Minimum sistem tidak akan berfungsi tanpa adanya I/O berhenti. dalam hal ini I/O tersebut berupa driver motor. Driver Itulah cara kerja motor stepper. motor ada banyak namun yang saya gunakan adalah driver motor dengan relay ay karena selain rangkaianya simple, pengecekan komponen mudah harganya pun terjangkau. a. Actuator 6 Ada pun sistem dari alat ini adalah seperti blog flowchart dibawah ini : DAFTAR PUSTAKA Gambar 9. Flowchart system Penjelasan : Input yang berupa fluida (gas) dari kompresor mengalir menuju katup, pada katup inilah udara yang masuk ke penyangga diatur (berapa udara yang harus keluar) tekanan udara di deteksi oleh sensor tekanan jika tekanan sudah memenuhi (dapat mengangkat beban dengan ideal) maka sensor tidak perlu mengirim instruksi pada microcontroller untuk menggerakan katup. Spherical bearing sebagai bantalan beban agar bisa bergerak dengan leluasa 7 [1] Jung, D., and P. Tsiotras. "A 3-DoF experimental testbed for integrated attitude dynamics and control research." AIAA Guidance, Navigation, and Control Conference and Exhibit. 2003. [2] Meissner, David M. A Three Degrees of Freedom Test Bed for NanoSatellite and CubeSat Attitude Dynamics, Determination, and Control. Thesis, Monterey, California: Naval Postgraduate School, 2009. [3] Mittelsteadt, C. O., and E. A. Mehiel. "The cal poly spacecraft attitude." AIAA Guidance, Navigation and. 2007. [4] Newport corporation. http://www.newport.com/AirBearing-Systems/492183/1033/catalog.aspx (accessed maret 3, 2011). [5] Schwartz, J. L., M. A. Peck, and C. D. Hall. "Historical review of air-bearing spacecraft simulators." Journal of Guidance, Control and Dynamics, vol.26, no. 4,, 2003. [6] Smith, G. A. "Dynamic Simulators for Test of Space Vehicle Attitude." Virginia Polytechnic Institute Proceedings of the Conference on the Role of Simulation in Space Technologies. 1964. [7] Ogata, Katsuhiko. " Modern Control Engineering Third Edition." University of minnesota . 1990.