bab ii landasan teori
advertisement

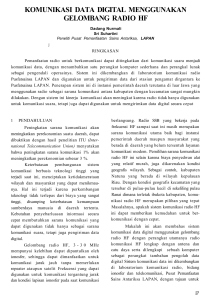
BAB II LANDASAN TEORI 2.1 Sistem Kendali Sistem kendali adalah proses pengaturan ataupun pengendalian terhadap satu atau beberapa besaran (variabel, parameter) sehingga berada pada suatu harga atau dalam suatu rangkuman harga (range) tertentu. Di dalam dunia industri, dituntut suatu proses kerja yang aman dan berefisiensi tinggi untuk menghasilkan produk dengan kualitas dan kuantitas yang baik serta dengan waktu yang telah ditentukan.Otomatisasi sangat membantu dalam hal kelancaran operasional, keamanan (investasi, lingkungan), ekonomi (biaya produksi), mutu produk, dll [3]. 2.2 Sistem Kendali Otomatis Suatu sistem kendali otomatis dalam suatu proses kerja berfungsi mengendalikan proses tanpa adanya campur tangan manusia (otomatis). Ada dua sistem kendali pada sistem kendali otomatis,yaitu : 2.2.1 Sistem Pengendalian Loop Terbuka Sistem pengendalian loop terbuka merupakan sistem pengendalian yang keluarannya tidak berpengaruh terhadap aksi selanjutnya ( aksi kontroler ). Atau dengan kata lain, sistem ini tidak memiliki umpan balik ( feed back ), sehingga keluarannya tidak bisa dijadikan perbandingan antara umpan balik dan masukan yang menentukan aksi berikutnya. Oleh karena itu, sistem pengendalian loop terbuka hanya bisa digunakan jika hubungan antara masukan dan keluaran diketahui dan tidak ada gangguan eksternal dan internal. Diagram blok sistem pengendalian loop terbuka mirip dengan diagram blok sistem,yaitu lurus tanpa adanya umpan balik. Hanya saja, komponen penyusunnya berbeda. Pada sistem pengendalian loop terbuka komponennya hanya ada masukan kontroler, aktuator dan keluaran. 5 6 Kelebihan sistem ini diantaranya konstruksinya sederhana, tidak memerlukan banyak komponen sehingga lebih ekonomis, tidak memiliki persoalan stabilitas, dll. Sedangkan kelemahanya diantaranya adalah keluaran kemungkinan besar berbeda dengan yang diinginkan, kalibrasi harus sering sistem dilakukan, dll [4]. C(s)- R(s)Controller Actuator Keluaran PLANT Set- Point Gambar 2.1 Diagram Blok Sistem Pengendalian Loop Terbuka 2.2.2 Sistem Pengendalian Loop Tertutup Sistem pengendalian loop tertutup merupakan sistem pengendalian yang keluarannya berpengaruh terhadap aksi selanjutnya ( aksi kontroler ). Berbeda dengan loop terbuka, pada loop tertutup sistem memiliki umpan balik (feed back), sehingga keluarannya bisa dijadikan perbandingan umpan balik dan masukan untuk menentukan aksi berikutnya. Seperti pada pengertiannya, diagram blok sistem pengendalian loop tertutup memiliki feed back (umpan balik). Perhatikan gambar di bawah ini. Summator R(s) E(s) Controller Actuator PLANT C(s) SP + _ Sensor Gambar 2.2 Diagram Blok Sistem Pengendalian Loop Tertutup Dari gambar di atas terlihat bahwa diagram blok sistem pengendalian loop tertutup memiliki komponen umpan balik. Pada referensi lain sinyal informasi dari kontroler dikirim dulu ke elemen kontrol akhir ( Final Control Element) 7 sebelum dikirim ke plant, misal controll valve. Sistem ini merupakan dasar sistem pengendalian yang ada di industri, hanya saja lebih komplek. Di industri bisa saja sistem pengendaliannya bertingkat dan saling berhubungan antara satu loop dengan loop lainnya. Dibandingkan dengan loop terbuka kelebihan dari sistem ini diantaranya adalah dapat mengatasi ketidakpastian karakteristik plant dan hubungan antara masukan dan keluaran dari plant, ketelitian dapat selalu terjaga, dll. Disamping kelebihan itu, ada beberapa kekurangan dari sistem ini, yaitu perlengkapan lebih jadi lebih mahal, instalasi sulit, respon cenderung berosilasi hingga rumit mencapai keadaan steady state-nya. Masukan pada sistem pengendalian, baik loop terbuka maupun tertutup terdapat komponen set point, yaitu nilai keluaran yang diharapkan dari proses yang nantinya akan dibandingkan dengan umpan balik pada loop tertutup. Sehingga loop tertutup ada error yang menyebabkan aksi kontroler berbeda untuk tiap waktu bergantung pada error yang ada. Error merupakan selisih antara set point dan umpan balik dari keluaran sebelumnya. Dengan adanya perbandingan ini ( error ) membuat sistem ini bisa mencapai nilai keluaran yang diinginkan tidak seperti pada loop terbuka [4]. 2.3 Macam – Macam Pengendali Dalam sistem kendali dikenal beberapa macam pengendali (controller) yang umum digunakan, antara lain : 1. Pengendali P (Proporsional) 2. Pengendali I (Integral) 3. Pengendali D (Derivatif) 4. Pengendali PI (Proporsional-Integral) 5. Pengendali PD (Proporsional-Derivaif) 6. Pengendali PID (Proporsional-Integral-Derivaif) Pada proyek akhir ini jenis pegendali yang akan digunakan adalah Pengendali PID (Proporsinal, Integral, dan Derivatif). Oleh karena itu, pembahasan akan terfokus dan lebih rinci mengenai Pengendali PID tersebut. 8 2.4 Pengendali Proporsional Pengendali proposional (P) memiliki keluaran yang sebanding/proposional dengan besarnya sinyal kesalahan (selisih antara besaran yang diinginkan dengan aktualnya) atau output sebanding dengan inputnya. Secara lebih sederhana harga dapat dikatakan, bahwa keluaran Pengendali proporsional merupakan perkalian antara konstanta proporsional dengan masukannya. Perubahan pada sinyal masukan akan segera menyebabkan sistem secara langsung mengubah keluarannya sebesar konstanta pengalinya. Persamaan dasar yang menyatakan hubungan antara masukan dan keluaran alat kendali proporsional dituliskan sebagai: c(t) = Kp.e(t).....................................................................................................(2.1) Dimana : c(t) = Keluaran alat kendali Kp = Penguatan/konstanta p e(t) = Sinyal pengendali C(s) = Kp.E(s)....................................................................................................(2.2) Dimana : c(t) = Keluaran alat kendali Kp = Penguatan/konstanta p E(s) = Sinyal pengendali C(s) dan E(s) merupakan transformasi laplace dari c(t) dan e(t) error atau masukan alat. 9 Summator R(s) E(s) Kp C(s) Set Point + Output _ Gambar 2.3 Diagram Blok Pengendali Proposional Gambar 2.3 menunjukkan blok diagram yang menggambarkan hubungan antara besaran setting, besaran aktual dengan besaran keluaran pengendali proporsional. Sinyal kesalahan (error) merupakan selisih antara besaran setting dengan besaran aktualmya. Selisih ini akan mempengaruhi pengendali, untuk mengeluarkan sinyal positif (mempercepat pencapaian harga setting) atau negatif (memperlambat tercapainya harga yang diinginkan) [2]. Gambar 2.4 Contoh Grafik Respon Pengendali P Orde 1 dan Orde 2 Ciri-ciri pengendali proporsional harus diperhatikan ketika pengendali tersebut diterapkan pada suatu sistem.Secara eksperimen, pengguna pengendali proporsional harus memperhatikan ketentuan-ketentuan berikut ini: 1. Kalau nilai Kp kecil, pengendali proporsional hanya mampu melakukan koreksi kesalahan yang kecil, sehingga akan menghasilkan respon sistem yang lambat. 2. Kalau nilai Kp dinaikkan, respon sistem menunjukkan semakin cepat mencapai keadaan mantapnya. 10 3. Jika nilai Kp diperbesar sehingga mencapai harga yang berlebihan, akan mengakibatkan sistem bekerja tidak stabil, atau respon sistem akan berosilasi. Pengaruh pada sistem : a) Menambah atau mengurangi kestabilan. b) Dapat memperbaiki respon transien khususnya : rise time (waktu naik), settling time (waktu tunak/steady state/konstan). c) Mengurangi (bukan menghilangkan) error steady state. 2.5 Pengendali Integral Alat kendali integral (I) merupakan pengembangan alat kendali proporsional dan juga alat kendali multi posisi. Dibandingkan alat kendali P, alat kendali ini mampu menghilangkan kesalahan statis. Dibandingkan alat kendali multi posisi, alat kendali ini mempunyai sifat yang antara keluaran dan masukannya mempunyai hubungan kontinyu. Tidak seperti pada alat kendali dua posisi atau multi posisi yang mempunyai histerisis (daerah netral),yaitu daerah dimana perubahan sinyal masukan (error) tidak mempengaruhi sinyal keluaran. Pada alat kendali integral, laju perubahan keluaran alat kendali adalah berbanding lurus terhadap sinyal error atau keluaran berbanding lurus terhadap integrasi sinyal error. Apabila sinyal kesalahan tidak mengalami perubahan, keluaran akan menjaga keadaan seperti sebelum terjadinya perubahan masukan. Sinyal keluaran pengendali integral merupakan luas bidang yang dibentuk oleh kurva kesalahan penggerak. Sinyal keluaran akan berharga sama dengan harga sebelumnya ketika sinyal kesalahan berharga nol. Gambar 2.5 menunjukkan contoh sinyal kesalahan yang disulutkan ke dalam pengendali integral dan keluaran pengendali integral terhadap perubahan sinyal kesalahan tersebut. Dan gambar 2.6 menunjukkan blok diagram antara besaran kesalahan dengan keluaran suatu pengendali integral [2]. 11 Gambar 2.5 Kurva Sinyal Kesalahan e(t) Terhadap t Dan Kurva u(t) Terhadap t Pada Pembangkit Kesalahan Nol Summator R(s) E(s) Set Point + Ki/s C(s) Output _ Gambar 2.6 Blok Diagram Hubungan Antara Besaran Kesalahan Dengan Pengendali Integral Pengendali integral, laju perubahan keluaran alat kendali adalah berbanding lurus terhadap sinyal error atau keluaran berbanding lurus terhadap integrasi sinyal. Secara matematis alat kendali ini dinyatakan sebagai: dc(t ) Ki.e(t )atau dt t c(t ) Ki. e(t ) ………………………………………………..…………(2.3) 0 Bila keluaran saat t = 0 adalah nol , maka transformasi Laplacenya adalah : C (s) Ki E ( s ) …………………………………………………………..……(2.4) s Sehingga fungsi alat kendali adalah : C ( s) Ki …………………………………………………………………….(2.5) E ( s) s 12 Waktu integrasi pada alat kendali adalah : Ti= 1 (det ik ) …………………………………………………………..……..(2.6) Ki Dimana : c(t) = Sinyal kendali e(t) = Sinyal error Ki = Penguatan integrasi C(s) = Keluaran pengendali E(s) = Sinyal pengendali Ti = Waktu integrasi (Catatan : keterangan diatas untuk 2.3 - 2.6) Pengaruh perubahan konstanta integral terhadap keluaran integral ditunjukkan oleh Gambar 2.7.Ketika sinyal kesalahan berlipat ganda, maka nilai laju perubahan keluaran pengendali berubah menjadi dua kali dari semula. Jika nilai konstanta integrator berubah menjadi lebih besar, sinyal kesalahan yang relatif kecil dapat mengakibatkan laju keluaran menjadi besar. Gambar 2.7 Perubahan Keluaran Sebagai Akibat Penguatan dan Kesalahan Ketika digunakan, pengendali integral mempunyai beberapa karakteristik berikut ini: 13 1. Keluaran pengendali integral membutuhkan selang waktu tertentu, sehingga pengendali integral cenderung memperlambat respon. 2. Ketika sinyal kesalahan berharga nol, keluaran pengendali integral akan bertahan pada nilai sebelumnya. 3. Jika sinyal kesalahan tidak berharga nol, keluaran akan menunjukkan kenaikan atau penurunan yang dipengaruhi oleh besarnya sinyal kesalahan dan nilai Ki . 4. Konstanta integral Ki yang berharga besar akan mempercepat hilangnya offset. Tetapi semakin besar nilai konstanta Ki akan mengakibatkan peningkatan osilasi dari sinyal keluaran pengendali (keadaan yang tidak stabil). Pengaruh pada sistem : a) Menghilangkan error steady state. b) Respon lebih lambat (dibandingkan dengan P). c) Dapat Menambah Ketidakstabilan (karena menambah orde pada sistem). 2.6 Pengendali Derivatif Keluaran pengendali derivatif (D) memiliki sifat seperti halnya suatu operasi derivatif. Perubahan yang mendadak pada masukan pengendali, akan mengakibatkan perubahan yang sangat besar dan cepat.Gambar 2.8 menunjukkan blok diagram yang menggambarkan hubungan antara sinyal kesalahan dengan keluaran pengendali. Dan gambar 2.9 menyatakan hubungan antara sinyal masukan dengan sinyal keluaran pengendali diferensial. Summator R(s) E(s) Set Point + Ki/s + Td.s C(s) Output _ Gambar 2.8 Blok Diagram Pengendali Derivatif 14 Secara matematis pengendali D ini dinyatakan sebagai: c(t) = KD.TD de ……………………………………………………………….(2.7) dt dimana: KD = Penguatan TD = Derivative time e = error Gambar 2.9 Kurva Waktu Hubungan Input-Output Pengendali Derivatif Gambar 2.9 menyatakan hubungan antara sinyal masukan dengan sinyal keluaran pengendali derivatif. Ketika masukannya tidak mengalami perubahan, keluaran pengendali juga tidak mengalami perubahan, sedangkan apabila sinyal masukan berubah mendadak dan menaik (berbentuk fungsi step), keluaran menghasilkan sinyal berbentuk impuls. Jika sinyal masukan berubah naik secara perlahan (fungsi ramp), keluarannya justru merupakan fungsi step yang besar magnitudnya sangat dipengaruhi oleh kecepatan naik dari fungsi ramp dan faktor konstanta diferensialnya (Td) [3]. Karakteristik pengendali derivatif adalah sebagai berikut: 1. Pengendali ini tidak dapat menghasilkan keluaran bila tidak ada perubahan pada masukannya (berupa sinyal kesalahan). 15 2. Jika sinyal kesalahan berubah terhadap waktu, maka keluaran yang dihasilkan pengendali tergantung pada nilai Td dan laju perubahan sinyal kesalahan. 3. Pengendali ini mempunyai suatu sehingga pengendali ini dapat karakter untuk menghasilkan mendahului, koreksi yang signifikan sebelum pembangkit kesalahan menjadi sangat besar. Jadi pengendali derivatif dapat mengantisipasi pembangkit kesalahan, memberikan aksi yang bersifat korektif, dan cenderung meningkatkan stabilitas sistem. Berdasarkan karakteristik pengendali tersebut, pengendali derivatif umumnya dipakai untuk memperkecil mempercepat kesalahan respon awal suatu sistem, tetapi tidak pada keadaan tunaknya. Kerja pengendali derivatif hanyalah efektif pada lingkup yang sempit, yaitu pada periode peralihan. Oleh sebab itu, pengendali derivatif tidak pernah digunakan tanpa ada pengendali lain sebuah sistem. Pengaruh pada sistem : a) Memberikan efek redaman pada sistem yang berosilasi sehingga bisa memperbesar pemberian nilai Kp. b) Memperbaiki respon transien, karena memberikan aksi saat ada perubahan error. c) D hanya berubah saat ada perubahan error, sehingga saat ada error statis D tidak beraksi sehingga D tidak boleh digunakan sendiri. 2.7 Pengendali Proporsional - Integral Alat pengendalian proporsional - integral (PI) adalah alat pengendalian hasil kombinasi dari alat pengendalian proporsional (P) dan alat pengendalian integral (I). 16 Summator R(s) E(s) C(s) P+I Set Point + Process Output _ Gambar 2.10 Diagram Blok Pengendali PI Pada Sistem Kendali Close Loop Bentuk matematis alat pengendalian ini merupakan kombinasi penambahan persamaan pengendalian dari alat pengendalian P dan alat pengendalian I. Upi(t)=Kpe(t) Kp T1 t e(t )dt ………………………………………………...........(2.8) 0 Jika harga awal dianggap nol, maka transformasi Laplace persamaan di atas adalah Upi(s)=KpE(s)+ Kp TI s E(s) ……………………………………………………....(2.9) Maka fungsi alih alat pengenalian dapat dituliskan : C ( s) 1 Kp(1 ) ………………………………………………………….(2.10) E ( s) Tis Dimana : Upi = Manipulated variabel Kp = Penguatan proporsional Ti = Waktu integrasi E(s) = Sinyal pengendal C(s) = Keluaran pengendali (Catatan : Keterangan diatas untuk 2.8 – 2.10) Kp adalah penguatan proporsional, dan T1 adalah waktu integral. Kedua parameter ini dapat diset harganya. Waktu integral mengatur aksi pengendalian integral namun pengubahan penguatan proporsional mempengaruhi kedua bagian 17 aksi pengendalian, yakni bagian proporsional dan bagian integral. Dalam alat pengendalian integral, parameter pengendaliannya biasa juga dinyatakan dengan laju reset (reset rate) atau Ki yang merupakan kebalikan dari waktu integral Ti. Laju reset ini adalah berapa kali per menit aksi bagian pengendalian proporsional menjadi dua kali lipat. Untuk memperjelas pengertian waktu integral dapat dilihat dalam penjelasan tanggapan step alat pengendalian [3]. 2.8 Pengendali Proporsional - Derivatif Mode pengontrolan ini adalah gabungan antara mode Proporsional (P) dengan mode Derivatif (D).Fungsi alih kontrol PD ini merupakan kombinasi penambahan kontrol P dengan kontrol D,yaitu: Apabila pada masukan alat kendali diinjeksikan sinyal dengan fungsi step, maka tanggapan yang terjadi pada keluaran alat pengendalian dapat digambarkan seperti gambar dibawah ini [6]. Secara matematis pengendali PD ini dapat dirumuskan : U(s)/E(s) =KP+KDs atau KP(1+TDs).................................................................(2.11) Dimana : U(s) = Keluaran pengendali E(s) = Sinyal pengendali Kp = Penguatan proporsional Kd = Penguatan derivatif Td = Waktu derivatif 2.9 Pengendali Proporsional – Integral - Derivatif Sistem kendali ini terdiri dari tiga buah cara pengaturan,yaitu kendali P (Proportional), D (Derivative) dan I (Integral), dengan masing-masing memiliki kelebihan dan kekurangan.Dalam implementasinya masing-masing cara dapat bekerja sendiri maupun gabungan diantaranya. Setiap kekurangan dan kelebihan dari masing-masing pengendali P, I dan D dapat saling menutupi dengan menggabungkan ketiganya baik secara seri maupun paralel menjadi pengendali proposional plus integral plus diferensial (pengendali PID).Elemen-elemen kontroller P, I dan D masing-masing secara 18 keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal yang besar. Karakteristik pengendali PID sangat dipengaruhi oleh kontribusi besar dari ketiga parameter P, I dan D. Penyetelan konstanta Kp, Ti, dan Td akan mengakibatkan penonjolan sifat dari masing-masing elemen. Satu atau dua dari ketiga konstanta tersebut dapat disetel lebih menonjol dibanding yang lain. Konstanta yang menonjol itulah akan memberikan kontribusi pengaruh pada respon sistem secara keseluruhan.Pengendali PID adalah pengendali yang banyak digunakan dalam industri sistem kendali. Sebuah pengendali PID menghitung error sebagai perbedaan antara diukur variabel proses dan diinginkan set poin. pengendali berupaya untuk meminimalkan kesalahan dengan menyesuaikan proses input kendali. Dengan tidak adanya pengetahuan tentang proses yang mendasari, pengendali PID adalah pengendali yang terbaik. Namun, untuk kinerja terbaik, parameter PID yang digunakan dalam perhitungan harus di setel sesuai dengan sifat sistem. Cara kerja : PID adalah gabungan antara pengendali Proportional (P), Integral (I), dan Derivative (D). Pengendali proportional digunakan untuk mempercepat respon terhadap error yang sedang terjadi (present time). Pengendali integral digunakan untuk mengurangi error steady state dengan cara mengakumulasikan error selama selang waktu tertentu (Past time). Pengendali derivative bekerja dengan cara mengantisipasi error yang akan terjadi berdasarkan perubahan error yang telah terjadi (Future time). Dengan menggabungkan ketiga pengendali tersebut secara paralel atau seri, maka akan diperoleh respon masing – masing pengendali. Respon yang dihasilkan dari pengendali PID ialah cepat (pengendali proportional), memperbaiki respon (pengendali integral),dan mempercepat waktu mantap (pengendali Derivative).Dengan menggunakan pengendali PID akan mendapatkan suatu respon yang baik dalam pengendalian sistem agar sesuai dengan yang kita harapkan. 19 Dalam perancangan sistem kendali PID yang perlu dilakukan adalah mengatur parameter P, I atau D agar tanggapan sinyal keluaran sistem terhadap masukan tertentu sebagaimana yang diiginkan. Tabel 2.1 Tanggapan Sistem Kendali PID Terhadap Perubahan Parameter Respon Close Loop Waktu Naik Proporsional (Kp) Menurun Integral (Ki) Menurun Derivatif (Kd) Perubahan Kecil Overshoot Waktu Turun Kesalahan Keadaan Tunak Meningkat Perubahan Menurun Kecil Meningkat Meningka Hilang tMenurun Perubahan Menurun Kecil Untuk merancang sistem kendali PID, kebanyakan dilakukan dengan metoda coba- coba atau (trial & error). Hal ini disebabkan karena parameter Kp, Ki dan Kd tidak independent. Untuk mendapatkan aksi kendali yang baik diperlukan langkah coba-coba dengan kombinasi antara P, I dan D sampai ditemukan nilai Kp, Ki dan Kd seperti yang diiginkan [7]. P Summator R(s) E(s) C(s) I Set Point + Proses _ PV D Sinyal Feedback Gambar 2.11 Blok Diagram Pengendali PID Paralel Persamaan matematis dari blog diagram diatas adalah: ………...…………………(2.12) 20 Dimana : Vo = Tegangan keluaran Kp = Penguatan integral Kd = Penguatan derivatif Gambar 2.12 Rangkaian Pengendali PID Analog Paralel Sederhana 2.10 Tanggapan Step Ketika masukan step diinjeksikan ke dalam alat pengendalian, yang pertama bereaksi adalah alat pengendalian proporsional baru kemudian disusul aksi alat pengendalian integral, sehingga secara keseluruhan membentuk tanggapan pengendalian. 21 Penting untuk diperhatikan adalah waktu integral Ti. Berdasarkan gambar 2.13 terlihat jelas apa yang dimaksud dengan waktu integral,yaitu waktu yang diperlukan, sehingga keluaran alat pengendalian menjadi dua kali lipat keluaran bagian proporsional. Di dalam gambar 2.13 dinyatakan bahwa Ti adalah waktu yang diperlukan oleh alat pengendalian integral agar keluaran bagian pengendalian integral sama dengan keluaran yang dihasilkan oleh bagian pengendalian proporsional (dari Kp ke 2Kp) [1]. Gambar 2.13 Tanggapan Step Alat Pengendalian PI Karakteristik Pengendali PI : 1) Efek P : mempercepat respon dan terjadi offset (proses berorde tinggi Kp yang terlalu besar akan menimbulkan osilasi). 2) Efek I : menghilangkan offset, respon lambat. 3) Efek P I : respons cukup cepat, offset hilang. 4) Pada proses beorde tinggi dan mengandung waktu tunda (delay time). Pemilihan PI yang tidak tepat akan membuat sistem tidak stabil. 22 Tabel 2.2 Karakteristik Penguatan Pengendali PI (Proposional & Integral) Waktu Tanjakan Overshoot Waktu Penetapan Eror Tunak Kestabilan Kp Berkurang Bertambah Sedikit Bertambah Berkurang Menurun Ki Sedikit Berkurang Bertambah Bertambah Banyak Berkurang Menurun Penguatan 2.11 Tanggapan Sistem Kendali Secara Umum Ketelitian adalah menunjukkan deviasi keluaran sebenarnya terhadap nilai yang diinginkan. Umumnya ketelitian sistem pengaturan diperbaiki dengan menggunakan mode pengontrol seperti integrasi atau integrasi proporsional. Kestabilan adalah suatu sistem dikatakan stabil jika keluarannya tetap pada nilai tertentu dalam jangka waktu yang ditetapkan setelah diberi masukan. Keluaran suatu sistem tak stabil akan terus naik atau dan turun hingga kondisi break down. Kecepatan respon (response) adalah mengukur kecepatan keluaran dalam menanggapi perubahan nilai masukan. Pada sistem orde dua, tanggapan sistem kendali terbagi menjadi tiga berdasarkan konstanta peredamannya, yaitu sistem kurang teredam/under damped (ζ < 1), teredam kritis/critical damped (ζ = 1) dan teredam lebih/over damped (ζ > 1) [3]. Gambar 2.14 Kurva Peredaman 23 2.11.1 Tanggapan Transien Tanggapan transien adalah tanggapan sistem yang berlangsung dari awal dikenai perubahan masukan atau gangguan sampai keadaan akhir atau kondisi tunak (steady state) [7]. Gambar 2.15 Kurva Tanggapan Sistem Beberapa Parameter yang penting untuk diketahui dalam tanggapan Transien, yaitu: a) Waktu tunda (Delay Time), adalah waktu yang diperlukan sistem untuk mencapai separuh dari harga akhirnya untuk pertama kali. b) Waktu naik (Rise Time), adalah waktu yang diperlukan sistem untuk naik dari 10% sampai 90% nilai akhir. c) Waktu puncak (Peak Time), adalah waktu yang diperlukan sistem untuk mencapai puncak pertama kali. d) Persen Overshoot, adalah perbandingan nilai puncak maksimum dengan nilai akhir yang dinyatakan dalam bentuk: %OS= x 100%..............................................................(2.13) Dimana : Mp max = Maksimum overshoot Mp akhir = Maksimum overshoot akhir %OS = Persen overshoot e) Waktu penetapan (Settling Time), adalah waktu yang diperlukan sistem untuk mencapai nilai ±2% dari nilai keadaan tunak (Steady State). f) Kesalahan keadaan tunak (Steady State Error), adalah perbedaan antara keluaran yang dicapai saat tunak dengan nilai yang diinginkan. 24 2.12 Operasional Amplifier (Op-Amp) Penguat operasional atau yang biasa disebut op-amp merupakan suatu jenis penguat elektronika dengan sambatan (coupling) arus searah yang memiliki bati (faktor penguatan/gain) sangat besar dengan dua masukan dan satu keluaran. Penguat operasional pada umumnya tersedia dalam bentuk sirkuit terpadu dan yang paling banyak digunakan adalah seri 741. Penguat operasional adalah perangkat yang sangat efisien dan serba guna. Contoh penggunaan penguat operasional adalah untuk operasi matematika sederhana seperti penjumlahan dan pengurangan terhadap tegangan listrik hingga dikembangkan kepada penggunaan aplikatif seperti komparator dan osilator dengan distorsi rendah. Penguat operasional dalam bentuk rangkaian terpadu memiliki karakteristik yang mendekati karakteristik penguat operasional ideal tanpa perlu memperhatikan apa yang terdapat di dalamnya.Karakteristik penguat operasional ideal adalah: 1. Bati tegangan tidak terbatas. 2. Impedansi masukan tidak terbatas. 3. Impedansi keluaran nol. 4. Lebar pita tidak terbatas. 5. Tegangan offset nol (keluaran akan nol jika masukan nol). Operasional Amplifier sebenarnya dikembangkan dari amplifier differensial yang digunkan untuk membandingkan dua buah sinyal input. Susunan sirkit amplifier opeasional/operational amplifiers (op-amp) yang ditransistorisasi menjadikannya sangat cocok untuk integrasis, sehingga tersedia berbagai jenis opamp dalam paket IC. Perhatikanlah op-amp yang terkompensasi secara internal. Seperti SN 72741 (biasa dikatakan 741) yang dapat dibandingkan dengan amplifier sederhana bertransistor tunggal seperti pada gambar 2.16. 25 Gambar 2.16 Perbandingan Antara Amplifier Transistor dan Op-Amp. Kedua amplifier ini memerlukan hanya lima buah sambungan untuk input, output, dan suplai daya, tetapi op-amp memiliki kelebihan hampir dalam semua hal. Misalnya, kemampuan dc-nya melebihi 200.000 V, sedangkan amplifier transistor hanya 100; impedans input-nya 2MΩ, sedangkan amplifier transistor mendekat 20KΩ, dan impedansi outputnya-nya 100Ω, sedangkan amplifier transistor mendekati 10 KΩ. Selain itu harga sebuah op-amp IC dapat lebih menguntungkan. Hampir semua amplifier memiliki rangkaian input yang terdiri dari sepasang transistor bipolar dengan bentuk pasangan berekor panjang. Tentu saja diperlukan arus basis tertentu untuk menjaganya agar tetap terbias. Walaupun transistor input itu terpasang sangat baik, tidaklah mungkin mencocokannya dengan sempurna. Oleh karena itu, akan terdapat offset tegangan input dan offset arus input yang kecil (VIO dan IIO). Sama dengan itu impedansi input diferensial diantara basis – basis input akan lebih rendah daripada infinitas (ketidakterbatasan) dan impedansi output amplifier akan lebih besar daripada nol [2]. 2.12.1 Inverting Amplifier Pada rangkaian inverting amplifier, input non-inverting di-ground-kan sedangkan input inverting sebagai masukan. Dengan mengasumsikan, bahwa opamp mempunyai open loop gain yang tidak berhingga, maka perbedaan tegangan antara input inverting dan input non-inverting sama dengan nol (Ed=0). Pada 26 kondisi ini, input inverting disebut virtual ground. Arus yang mengalir pada Ri adalah VIN/R1 dan arus pada RF adalah VOUT/RF. Gambar 2.17 Rangkaian Pembalik (Inverting Amplifier) Penguatan tegangan pada inverting amplifier sama dengan harga resistor feedback dibagi dengan harga resistor input. Tanda minus menunjukkan adanya perbedaan fasa antara input dan output [2]. .........................................................................................(2.14) ..........................................................................................(2.15) Dimana : Vout = Tegangan keluaran Vin = Tegangan masukan Rf = Tahanan beban Ri = Tahanan input A = Hasil bagi Vout/Vin 2.12.2 Non-Inverting Amplifier Penguat non-inverting adalah penguat yang keluarannya sefasa dengan masukannya serta memenuhi hubungan Rf tertentu dengan Ri. Diagram rangkaian penguat non-inverting dapat dilihat pada gambar 2.18[2]. 27 Gambar 2.18 Non-Inverting Amplifier Apabila diasumsikan tegangan antara tegangan terminal inverting (-) dan non-inverting (+) adalah 0 volt, berarti tegangan keluarannya sama dengan Vi. Arus yang mengalir pada Ri sama dengan arus yang mengalir pada Rf, yaitu: ............................................................................................................. (2.16) .................................................................................... (2.17) atau ........................................................................................... (2.18) Dimana : Vout = Tegangan keluaran Vin = Tegangan masukan Rf = Tahanan beban Ri = Tahanan input I = Hasil bagi Vi/Ri 28 2.12.3 Integrator Rangkaian integrator digunakan untuk mencari nilai hasil integrasi dari sinyal input (Gambar 2.19) [2]. Gambar 2.19 Rangkaian Integrator Rangkaian integrator memiliki penguatan tegangan sebesar: Vout= ......................................................................................(2.21) Bentuk 1/RAC harus sesuai dengan masukan frekuensi minimum yang diharapkan: ................................................................................................(2.22) Dimana : Vout = Tegangan keluaran Ra = Tahanan input C = Kapasitor beban fmm = Frekuensi 2.12.4 Summing Amplifier Summing amplifier adalah rangkaian yang digunakan untuk menjumlahkan dua tegangan input atau lebih[2]. 29 Gambar 2.20 Rangkaian Summing Amplifier Rangkaian summing amplifier menjumlahkan dua penguatan tegangan atau lebih. Penguatan tegangan 1 adalah : ..........................................................................................................................(2.23) Penguatan tegangan 2 adalah : ......................................................................................................(2.24) Penguatan tegangan total dari summing amplifier adalah : ..........................................................................................................................(2.25) Dimana : Vo = Tegangan keluaran V1 = Tegangan masukan 1 V2 = Tegangan masukan 2 RB = Tahanan beban R1 = Tahanan input 1 R2 = Tahanan input 2 2.12.5 Penguat Differensiator Rangkaian differensiator adalah rangkaian aplikasi dari rumusan matematika yang dapat dimainkan (dipengaruhi) dari kerja kapasitor [2]. 30 Gambar 2.21 Rangkaian Penguat Differentiator Tegangan Keluarannya adalah : Vout = -RC dvIn/dt..............................................................................................(2.26) Dimana : Vout = Tegangan keluaran RC = Tahanan beban C = Kapasitor