BAB II LANDASAN TEORI 2.1 Mesin Listrik Prinsip
advertisement

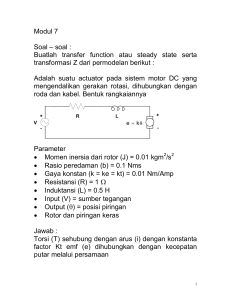
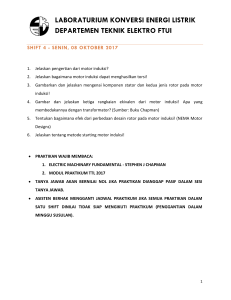
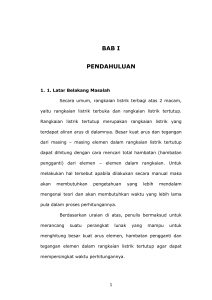
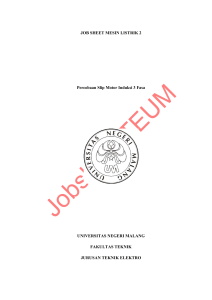
BAB II LANDASAN TEORI 2.1 Mesin Listrik Prinsip dasar dari sebuah mesin listrik adalah konversi energi elektromekanik, yaitu konversi dari energi listrik ke energi mekanik atau sebaliknya dari energi mekanik ke energi listrik. Alat yang dapat mengubah (mengkonversi) energi mekanik ke energi listrik disebut generator, dan apabila mesin melakukan proses konversi sebaliknya yaitu dari energi listrik ke energi mekanik disebut motor. Selain generator dan motor, transformator juga termasuk alat listrik yang menjadi bahasan pada saat mempelajari mesin, meskipun energi yang masuk dan yang keluar dari transformator sama yaitu energi listrik. Pada transformator energi listrik yang diberikan pada lilitan akan mengakibatkan timbulnya medan magnet pada inti besi dan selanjutnya diubah kembali menjadi energi listrik. Mesin listrik mulai dikenal tahun 1831 dengan adanya penemuan oleh Michael Faraday mengenai induksi elektromagnetik yang menjadi prinsip kerja motor listrik. Percobaan mengenai konsep mesin listrik di laboratorium-laboratorium terus dilakukan sampai tahun 1870 saat Thomas Alfa Edison memulai pengembangan generator arus searah secara komersial untuk mendukung distribusi tenaga listrik yang berguna bagi penerangan listrik di rumah-rumah. Kejadian yang penting dalam sejarah mesin listrik adalah dengan dipantenkannya motor induksi tiga fasa oleh Nikolai Tesla pada tahun 1888. Konsep Tesla mengenai arus bolak-balik selanjutnya dikembangkan oleh Charles Steinmetz pada dekade berikutnya, sehingga pada tahun 1890 transformator dapat diwujudkan, sekaligus menjadi pembuka jalan untuk melakukan transmisi daya listrik jarak jauh. Meskipun konsep mesin listrik yang digunakan saat ini tidak berbeda dari sebelumnya, tetapi perbaikan dan proses pengembangan tidak berhenti. Pengembangan bahan ferromagnetic dan isolasi terus dilakukan untuk meningkatkan kemampuan daya yang lebih besar dibandingkan dengan mesin listrik yang digunakan sekarang ini. 6 7 Mesin listrik memegang peranan yang sangat penting dalam industri maupun dalam kehidupan sehari-hari. Pada power plant digunakan untuk membangkitkan tenaga listrik, di industri digunakan sebagai penggerak peralatan mekanik, seperti mesin pembuat tekstil, pembuat baja, dan mesin pembuat kertas. Dalam kehidupan sehari-hari mesin listrik banyak dimanfaatkan pada peralatan rumah tangga listrik, kendaraan bermotor, peralatan kantor, peralatan kesehatan, dan sebagainya. Ada tiga katagori utama untuk mesin putar (rotating machines) atau mesin dinamis yaitu mesin arus searah, mesin induksi, dan mesin sinkron. Dari katagori utama ini dikelompokkan lagi atas generator dan motor. Transformator termasuk katagori mesin statis, dan berdasarkan fasanya dibagi atas transformator satu fasa dan tiga fasa. 2.2 Motor Listrik Motor listrik merupakan sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi menjadi energi mekanik. Energi mekanik ini biasanya digunakan untuk memutar impeller pompa, fan atau blower, menggerakan compressor, menggerakan conveyor, mengangkat bahan , dll. Motor listrik digunakan juga di rumah (mixer, bor listrik, fan angin) dan industri. Motor listrik kadangkala disebut “ kuda kerja” nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik. Motor listrik terbagi menjadi 2 jenis, yaitu motor listrik AC (Alternative Current) dan motor listrik DC (Direct Current). 2.2.1 Motor Listrik AC Motor arus bolak-balik (motor AC) ialah suatu mesin yang berfungsi mengubah tenaga listrik arus bolak-balik (listrik AC) menjadi tenaga gerak atau tenaga mekanik berupa putaran daripada rotor. Bila ditinjau dari hubungan antara putaran dan frekuensi/putaran fluks magnet pada stator, maka motor AC dapat dibedakan atas : 1. Motor Sinkron (motor serempak) 8 Disebut motor sinkron, karena putaran motor sama dengan putaran fluk magnet pada stator, sesuai dengan persamaan : ns = Dimana, n = jumlah putaran tiap menit (r.p.m) F = frekuensi P = jumlah kutub Pada motor sinkron, motor tidak dapat berputar dengan sendirinya walaupun pada lilitan statornya telah dihubungkan dengan sumber tegangan. Agar motor sinkron dapat berputar, diperlukan penggerak permulaan. Sebagai penggerak permulaan biasanya dikerjakan oleh mesin lain. 2. Motor Asinkron (motor tak serempak) Disebut motor asinkron, karena putaran motor tidak sama dengan putaran fluk magnit stator, atau dengan kata lain bahwa antara rotor dengan fluks magnit stator terdapat selisih perputaran yang disebut slip. Motor asinkron juga sering disebut dengan motor induksi. 2.2.2 Motor Induksi Motor induksi adalah motor yang mempunyai slip antara medan putar dengan putaran rotornya. Di dalam motor induksi juga terdapat komponen utama yaitu rotor dan stator. Rotor pada motor induksi terbagi menjadi dua jenis rotor yaitu : Rotor kandang tupai terdiri dari batang penghantar tebal yang dilekatkan dalam petak-petak slots parallel. Batang-batang tersebut diberi hubungan pendek pada kedua ujungnya dengan alat cincin hubungan pendek. Lingkaran rotor yang memiliki gulungan tiga fase, lapisan ganda dan terdistribusi. Rotor tersebut dibuat melingkar sebanyak kutub stator. Tiga fase digulungi kawat pada bagian dalamnya dan ujung yang lainnya dihubungkan ke cicin kecil yang dipasang pada batang as dengan sikat yang menempel. 9 Untuk stator yang ada di motor induksi ini dibuat dari sejumlah stampings dengan slots untuk membawa gulungan tiga fase. Gulungan ini dilingkarkan untuk sejumlah kutub yang tertentu. Gulungan diberi spasi geometri sebesar 120 derajat. Motor induksi diklasifikasikan menjadi dua kelompok utama yaitu motor induksi satu fasa dan motor induksi tiga fasa. Untuk motor induksi satu fasa penggunaan di industri sangatlah kurang dan kebanyakan di industri-industri besar itu menggunakan motor induksi tiga fasa. 2.2.3 Motor Induksi Tiga Fasa Motor induksi tiga fasa adalah motor listrik yang mempunyai kapasitas-kapasitas daya yang besar. Dari alasan inilah banyak perusahaan atau industri-industri besar memilih motor induksi tiga fasa ini sebagai mesin-mesin yang membantu dalam proses produksi setiap harinya. Gambar 2.1 Motor induksi tiga fasa Jenis-jenis motor induksi terbagi menjadi dua yaitu ada motor induksi tiga fasa rotor sangkar dan motor induksi tiga fasa rotor lilit. 2.2.3.1 Rotor Sangkar Belitan rotor terdiri atas batang-batang penghantar yang ditempatkan di dalam alur rotor. Batang penghantar ini terbuat dari tembaga, alloy atau alumunium. Ujung-ujung batang penghantar dihubung singkat oleh cincin 10 penghubung singkat, sehingga berbentuk sangkar burung. Karena batang penghantar rotor yang telah dihubung singkat, maka tidak dibutuhkan tahanan luar yang dihubungkan seri dengan rangkaian pada saat awal berputar. Alur alur rotor biasanya tidak dihubungkan sejajar dengan sumbu (poros) tetapi sedikit miring. Gambar 2.2 Rotor sangkar 2.2.3.2 Rotor Lilit Rotor lilit terdiri atas belitan fasa banyak, belitan ini dimasukkan ke dalam aluralur initi rotor. Belitan ini sama dengan belitan stator, tetapi belitan selalu dihubungkan secara bintang. Tiga buah ujung-ujung belitan dihubungkan ke terminal- terminal sikat atau cincin seret yang terletak pada poros rotor. Pada jenis rotor lilit kita dapat mengatur kecepatan motor dengan cara mengatur tahanan belitan rotor tersebut. Pada keadaan kerja normal sikat karbon yang berhubungan dengan cincin seret tadi dihubung singkat. Motor induksi rotor lilit dikenal dengan sebutan Motor Induksi Slipring atau Motor Induksi Rotor Lilit. 11 Gambar 2.3 Rotor Lilit Motor induksi rotor lilit adalah motor induksi dengan rotor di lilitankawat yang digunakan untuk aplikasi kecepatan yang variabel. Stator terdiri dari tiga lilitan satu-fase yang diletakan berjarak 120o listrik satu sama lain, dan dihubungkan ke sumber daya tiga-fase. Rotor tiga-fase mempunyai ujungujung luar ke slip ring. Kecepatan rotor lilit dapat diubah dengan menempatkan tahanan pada rangkaian rotor melalui slip ring. Semakin besar tahanan ditempatkan pada rangkaian rotor, semakin lambat motor berputar, apabila semua tahanan dihilangkan dari rangkaian rotor, motor akan berputar pada kecepatan penuh. Dengan menempatkan tahanan pada rangkaian rotor, mengurangi arus start dan menyediakan torsi start yang tinggi. Faktor daya motor jenis ini adalah rendah pada keadaan tanpa beban, dan penuh pada keadaan beban. Untuk membalik putaran motor jenis ini, tukarlah dua ujung-ujung sumber tegangan. Beberapa keuntungan dan kelemahan motor induksi rotor lilit meliputi: keuntungan: Torsi start tinggi dengan arus start rendah. Percepatan dengan beban berat lembut. Tidak ada pemanasan abnormal selama periode starting. Pengaturan kecepatan yang bagus selama bekerja dengan beban konstan. 12 Kelemahan: motor sangkar tupai. Regulasi kecepatan jelek, apabila bekerja dengan tahanan pada rangkaian rotor. Harga awal dan pemeliharaan lebih tinggi dibandingkan dengan 2.2.3.3 Rangkaian Ekivalen Rotor Lilit Kerja motor induksi seperti juga kerja transformator adalah berdasarkan prinsip induksi elektromagnet. Kerja motor induksi tergantung pada tegangan dan arus induksi pada rangkaian rotor dari rangkaian stator. Rangkaian ekivalen motor induksi mirip dengan rangkaian ekivalen trafo. Rangkaian ekivalen ini dibuat untuk memudahkan perhitungan. Rangkaian tersebut dapat dilihat pada gambar dibawah ini : Gambar 2.4 Rangkaian ekivalen motor induksi rotor lilit pada saat normal Rangkaian ekivalen motor induksi tiga fasa terdiri dari dua bagian yaitu, rangkaian ekivalen stator dan rangkaian ekivalen rotor. pada rangkaian stator terdapat impedansi stator Z1 yang terdiri dari resistansi R1 dan reaktansi stator X1. Selain impedansi Z1 terdapat impedansi yang disebabkan oleh inti juga yang terdiri dari Rc dan Xm sehingga arus yang mengalir pada stator adalah jumlah arus yang mengalir pada inti dan arus yang mengalir ke Z 1. Sedangkan pada rotor tidak jauh berbeda, hanya saja pada rotor tidak terdapat impedansi yang disebabkan oleh inti. Kecepatan putaran motor pada keadaan normal berbeda antara stator dan rotor, karena terdapat celah udara diantara stator dan rotor. Rotor hanya mendapatkan induksi atau imbas tegangan dari 13 stator dan itulah yang menyebabkan terjadinya perbedaan. Perbedaan kecepatan tersebut bisa disebut sebagai slip motor. Dalam menghitung arus pada saat berputar normal dan pada saat starting berbeda karena pada saat berputar nilainya akan dipengaruhi oleh slip. Saat berputar I2 = A...............................................................(2.1) √ Cosφ2 = √ ...........................................................(2.2) T= N-m ...........................................................(2.3) √ Gambar 2.5 Rangkaian ekivalen motor induksi rotor lilit pada saat start Sedangkan pada saat starting atau pengasutan sebelum motor berputar perhitungannya tidak dipengaruhi dengan slip karena motor tidak mempunyai perbedaan kecepatan antara stator dan rotor . sehingga rumus yang digunakan adalah sebagai berikut. Saat pengasutan S = 1 I2 = Cosφ2 = T= A..................................................................(2.4) √ √ √ ..............................................................(2.5) N-m .............................................................(2.6) 14 dan Mekanisme Kerja Motor Listrik 2.3 Prinsip Masing-masing motor listrik mempunyai bagian yang diam dan bagian yang bergerak. Bagian yang bergerak dan diam terdiri dari inti besi yang dipisahkan oleh celah udara dan membentuk rangkaian magnetic dimana fluksi dihasilkan oleh aliran arus melalui kumparan atau belitan yang terletak didalam kedua bagian tersebut. Bagian pada motor listrik disebut dengan stator. Sedangkan bagian yang bergerak disebut dengan rotor. Stator yaitu suatu kumparan pada motor yang berfungsi sebagai penerima tegangan. Tegangan yang diberikan pada stator akan menghasilkan arus. Arus yang dihasilkan akan menimbulkan medan magnet yang berputar. Medan magnet tersebut akan menginduksi pada rotor dan rotor berputar. Gambar 2.6 Stator Gambar 2.7 Rotor 15 Mekanisme kerja untuk seluruh jenis motor secara umum sama yaitu : Arus listrik dalam medan magnet akan memberikan gaya Jika kawat yang membawa arus dibengkokan menjadi sebuah lingkaran atau loop, kedua sisi loop pada sudut kanan medan magnet akan mendapatkan gaya pada arah yang berlawanan. Pasangan gaya menghasilkan tenaga putar atau torsi untuk memutar kumparan. Prinsip kerja motor induksi atau terjadinya putaran pada motor, bisa dijelaskan sebagai berikut : Bila kumparan stator diberi suplai tegangan tiga fasa, maka akan terjadi medan putar dengan kecepatan Ns = Gambar 2.8 Bentuk Gelombang Sinusoida dan Timbulnya Medan Putar pada Stator Motor Induksi 1. Saat sudut 00. Arus I1 bernilai positip dan arus I2 dan arus I3 bernilainegatip dalam hal ini belitan V2, U1 dan W2 bertanda silang (arus meninggalkan pembaca), dan belitan V1, U2 dan W1 bertanda titik (arus listrik menuju pembaca). terbentuk fluk magnet pada garis horizontal sudut 00. kutub S (south=selatan) dan kutub N (north=utara). 2. Saat sudut 1200. Arus I2 bernilai positip sedangkan arus I1 dan arus I3 bernilai negatip, dalam hal ini belitan W2, V1 dan U2 bertanda silang (arus meninggalkan 16 pembaca), dan kawat W1, V2 dan U1 bertanda titik (arus menuju pembaca). Garis fluk magnit kutub S dan N bergeser 1200 dari posisi awal. 3. Saat sudut 2400. Arus I3 bernilai positip dan I1 dan I2 bernilai negatip, belitan U2, W1 dan V2 bertanda silang (arus meninggalkan pembaca), dan kawat U1, W2 dan V1 bertanda titik (arus menuju pembaca). Garis fluk magnit kutub S dan N bergeser 1200 dari posisi kedua. 4. Saat sudut 3600. posisi ini sama dengan saat sudut 0 0. dimana kutub S dan N kembali keposisi awal sekali. Medan putar stator tersebut akan mengimbas penghantar yang ada pada rotor, sehingga pada rotor timbul tegangan induksi. Tegangan yang terjadi pada rotor menyebabkan timbulnya arus pada penghantar rotor. Selanjutnya arus di dalam medan magnet menimbulkan gaya (F) pada rotor. Gambar 2.9 Terjadinya Putaran pada Motor Induks Bila kopel mula yang dihasilkan oleh gaya (F) pada rotor cukup besar untuk menanggung kopel beban, maka rotor akan berputar searah dengan medan putar stator. Supaya timbul tegangan induksi pada rotor, maka harus ada perbedaan relatif antara kecepatan medan putar stator(Ns) dengan kecepatan putar rotor (Nr).Perbedaan kecepatan antara Nr dengan Ns disebut Slip (S), dan dinyatakan dengan persamaan S = x 100 % 17 Bila Nr = Ns tegangan tidak akan terinduksi dan arus tidak mengalir pada kumparan jangkar rotor, sehingga tidak dihasilkan kopel. Kopel pada motor akan terjadi bila Nr lebih kecil dari Ns. 2.4 Metode-Metode Pengasutan Motor Induksi Tiga Fasa 2.4.1 Direct On Line (DOL) Pengasutan hubungan langsung atau dikenal dengan istilah Direct On Line (DOL) Gambar 2.8. Jala-jala tegangan rendah 380 V melalui pemutus rangkaian atau kontaktor Q1 langsung terhubung dengan motor induksi. Sekering berfungsi sebagai pengaman hubung singkat, jika terjadi beban lebih diamankan oleh relay pengaman beban lebih (overload relay). Saat pemutus rangkaian/kontaktor di-ON-kan motor induksi akan menarik arus starting antara 5 sampai 6 kali arus nominal motor. Untuk motor induksi dengan daya kecil 5 kW, hubungan langsung bisa dipakai. Arus starting yang besar akan menyebabkan drop tegangan disisi suply. Rangkaian jenis ini banyak dipakai untuk motor-motor penggerak mekanik seperti mesin bubut, mesin bor, atau mesin freis. Motor di starting pada tegangan nominal, akan mengalir arus mendekati arus hubung singkat = 7 In. jika slip = 4% = 0,04. (Tst T ) = (Ist/I )2 · s = (7)2 × 0,04 = 1,96 Besarnya torsi starting = 1,96 kali torsi nominalnya. Kesimpulannya, saat arus starting 5 s/d 6 kali arus nominal hanya menghasilkan 1,96 × torsi nominalnya. Gambar 2.9. 18 Gambar 2.10 Pengawatan motor induksi pengasutan langsung (DOL) Gambar 2.11 Karakteristik torsi Karakteristik pengasutan langsung hanya sesuai untuk motor induksi berdaya kecil, karena untuk motor daya besar akan menyebabkan pengaruh drop tegangan yang besar. Ketika starting dimulai motor induksi akan menarik arus yang besarnya sampai 6 kali arus nominalnya. Secara berangsur-angsur ketika kecepatan motor mendekati nominalnya maka arus motor akan berada pada kondisi nominalnya (Gambar 2.10). Gambar 2.12 Karakteristik arus fungsi putaran,pengasutan DOL 19 2.4.2 Star Delta ( Y/D ) Motor induksi dengan pengasutan segitiga-bintang dengan sakelar manual (Gambar 2.11). Rangkaian bintang-segitiga juga dapat dilaksanakan menggunakan kontaktor secara elektromagnetik. Motor induksi dirangkai dengan sakelar manual bintang-segitiga. Saat sakelar posisi tuas 0, semua rangkaian terbuka, sehingga motor dalam kondisi tidak bertegangan. Saat sakelar posisi bintang (tanda Y), L1-U1; L2-V1, dan L3-W1, sementara W2 U2-V2 dihubungsingkatkan. Tegangan ke stator: Vstator = Vphasa = √ Istator = Iphasa = Tstarting = ( √ ) √ × Ths Jika diketahui Ths = 1,96 T nominal Tstarting = × 1,96 = 0,65 Gambar 2.13 Pengawatan pengasutan bintang-segitiga Arus nominal dan torsi nominal. Belitan stator mendapatkan tegangan sebesar tegangan phasa ke phasa. Harus diperhatikan nameplate motor untuk hubungan segitiga bintang harus disesuaikan dengan tegangan kerja yang digunakan, jika salah menggunakan belitan akan terbakar. Karakteristik arus fungsi putaran I = f(n) pengasutan bintang-segitiga (Gambar 2.12) ketika motor terhubung bintang, arus starting dua kali arus nominalnya sampai 75% dari putaran nominal. Ketika motor terhubung segitiga arus motor meningkat empat kali arus nominalnya. Secara berangsurangsur arus motor menuju nominal saat putaran motor nominal. Karakteristik torsi fungsi putaran T =f(n) pengasutan bintang-segitiga (Gambar 2.13) memperlihatkan ketika motor terhubung bintang, torsi starting sebesar setengah dari torsi nominalnya sampai 75% dari putaran nominal. Ketika motor terhubung segitiga torsi motor meningkat menjadi dua kali lipat 20 torsi nominalnya. Secara berangsur-angsur torsi motor mendekati nominal saat putaran motor nominal. Gambar 2.14 Karakteristik arus Gambar 2.15 Karakteristik Torsi 2.4.3 Autotransformer Starting dengan cara ini adalah dengan menghubungkan motor pada tap tegangan sekunder autotransformer terendah. Setelah beberapa saat motor dipercepat tap autotransformer diputuskan dari rangkaian dan motor terhubung langsung pada tegangan penuh. Gambar 2.16 Diagram Pengasutan Autotransformer 21 Pada autotransformer starter, arus yang mengalir adalah : I start = (A). Dimana : Vm = Tegangan sekunder dari Auto-Transformer V1 = Tegangan supply IDOL = Arus start langsung 2.4.4 Soft Starter Pengasutan soft starting menggunakan komponen solid-state, yaitu enam buah Thyristor yang terhubung antiparalel (Gambar 2.15). Saat sakelar Q1 di-ON-kan tegangan akan dipotong gelombang sinusoidanya oleh enam buah Thyristor yang dikendalikan oleh rangkaian triger. Dengan mengatur sudut penyalaan triger Thyristor, sama mengatur tegangan ke belitan stator motor. Dengan k sebagai ratio tegangan asut dengan tegangan nominal besarnya torsi motor starting. Tstarting = k2 · Ths Karakteristik arus fungsi putaran pada pengasutan soft starting, memperlihatkan grafik arus starting besarnya tiga kali arus nominalnya sampai motor mencapai putaran mendekati 85% (Gambar 2.16). Arus motor berangsur-angsur menuju arus nominalnya ketika putaran motor mendekati nominalnya. Pengasutan solid state makin diminati karena harganya ekonomis dan handal. Gambar 2.17 Pengawatan pengasutan soft starting 22 Karakteristik torsi fungsi putaran T = f(n) pengasutan soft starting, memperlihatkan torsi starting sebesar setengah dari torsi nominalnya, berangsur-angsur torsi meningkat mendekati 140% torsi saat putaran mendekati 90% nominalnya (Gambar 2.17). Secara berangsur-angsur torsi motor mendekati nominal saat putaran motor nominal. Gambar 2.18 Karakteristik arus Gambar 2.19 Karakteristik Torsi 2.4.5 Pengasutan Motor Sliring (Rotor Lilit) Motor slipring (Gambar 2.18) atau sering disebut motor rotor lilit termasuk motor induksi 3 phasa dengan rotor belitan dan dilengkapi dengan slipring yang dihubungkan dengan sikat arang ke terminal. Motor slipring dirancang untuk daya besar. Motor slipring pada terminal box memiliki sembilan terminal, enam terminal terhubung dengan tiga belitan stator masing-masing ujungnya (U1U2, V1-V2, dan W1-W2), tiga terminal (K-L-M) terhubung ke belitan rotor melalui slipring. Ada tiga cincin yang disebut slipring yang terhubung dengan sikat arang. Sikat arang ini secara berkala harus diganti karena akan memendek karena aus. Pengasutan rotor lilit (Gambar 2.19) belitan rotor yang ujungnya terminal K-L-M dihubungkan dengan resistor luar yang besarnya bisa diatur. Dengan mengatur resistor luar berarti mengatur besarnya resistor total yang merupakan jumlah resistansi rotor dan resistansi luar (Rrotor + Rluar), sehingga arus rotor I2 dapat diatur. 23 Gambar 2.20 Bentuk Fisik Motor Induksi Rotor Slipring Gambar 2.21 Belitan stator dan rotor motor slipring berikut resistor pada rangkaian rotor Ketika resistor berharga maksimum, arus rotor yang mengalir minimum, sekaligus memperbaiki faktor kerja motor. Kelebihan pengasutan rotor lilit yaitu diperoleh torsi starting yang tinggi, dengan arus starting yang tetap terkendali. 24 Data teknis motor rotor lilit dalam name plate (Gambar 2.20) menjelaskan informasi: Tegangan stator 400 V Arus stator 178 A Daya input 100 kW Faktor kerja 0,89 Putaran 1460 Rpm Ferkuensi 50 Hz Tegangan rotor 245 V Gambar 2.22 Name plate motor induksi jenis slipring Arus rotor 248 A Indek proteksi 44 Klas isolasi F Resistansi rotor luar dibuat bertahap (Gambar 2.21) dengan tujuh tahapan. Saat tahap- 1 nilai resistor maksimum kurva torsi terhadap slip, berikutnya tahap 2, 3, 4, 5, 6 dan tahap 7. Antara tahap-1 sampai tahap-7 selisih slip sebesar Δs. Dengan demikian pengaturan resistor rotor juga berfungsi mengatur putaran rotor dari putaran rendah saat tahap-1 menuju putaran nominal pada tahap-7. Pengaturan resistor rotor dapat menggunakan kontaktor elektromagnet (Gambar 2.22) dengan menggunakan 3 tahap. Kontaktor Q1 menghubungkan stator dengan sumber daya listrik. Gambar 2.23 Karakteristik torsi motor slipring 25 Gambar 2.24 Diagram kontrol dan diagram daya Pengendali 26 Gambar 2.25 Karakteristik torsi dengan tiga tahapan 1. Ketika Q2, Q3, Q4 OFF resistansi rotor maksimum (RA = R1 + R2 + R3). 2. Saat Q2 ON resistansi luar RA = R2 + R3. 3. Ketika Q3 ON resistansi RA = R3 saja. 4. Ketika Q4 ON rotor kondisi terhubung singkat RA = 0, motor bekerja nominal. Grafik momen motor rotor lilit Gambar 2.23 dengan empat tahapan. Tahap pertama yang saat Q1 kondisi ON dan Q2 + Q3 + Q4 posisi OFF. maka rangkaian tahanan rotor besarnya maksimum, besarnya arus starting 1,5 In sampai beberapa saat ke tahap kedua. Tahap kedua Q2 kondisi ON dan Q3 + Q4 posisi OFF, arus starting 1,5 In menuju In sampai tahap ketiga. Tahap ketiga Q3 kondisi ON dan Q4 posisi OFF, arus starting kembali ke posisi 1,5 In dan terakhir posisi tahap keempat saat Q4 ON semua resistor dihubungsingkatkan, dan motor slipring bekerja kondisi nominal. 2.5 Peralatan Kontrol pada Pengasutan Motor Rotor Lilit 2.5.1 Sekering atau Fuse Sekering sering disebut juga dengan pengaman lebur atau fuse. Funsi sekering adalah mengamankan peralatan atau instalasi listrik dari gangguan hubung singkat. Dalam pemasangannya, sekering dihubungkan pada hantaran 27 phasa yang tidak diketanahkan (R, S, T). Pengaman lebur ini mempunyai karakteristik pemutusan lebih cepat dibandingkan dengan MCB. Pengaman ini hanya dapat dipakai satu kali dan tidak bisa dioperasikan kembali. Gambar 2.26 Simbol Untuk Sekering Jenis-jenis Sekering 1. Berdasarkan dari cara pemutusannya, sekering dibagi menjadi dua macam yaitu sekering patron lebur dan sekering otomat. Warna kode yang digunakan untuk menandai patron lebur dengan kapasitas maksimum menghantarkan arus sebagai berikut : Tabel 2.1 Kode Warna Sekering Warna Kode Kapasitas Arus Max Warna Kode Kapasitas Arus Max Merah muda 2A Biru 20 A Coklat 4A Kuning 25 A Hijau 6A Hitam 35 2. Berdasarkan bentuk fisiknya, sekering tegangan rendah terdiri dari atas : 1. Tipe Ulir Sekering jenis ini merupakan sekering dengan kapasitas pemutus rendah yang terdiri atas 2 model yaitu : 28 Tipe D (diazed) memiliki bentuk fisik seperti gallon air mineral berdimensi kecil yang terbuat dari bahan keramik. Bagian dasar dan atas sekering terbuat dari bahan logam yang berfungsi sebagai komponen lainnya seperti rumah sekering (fuse holder), adaptor dan tutupnya (fuse cap). Tipe DO (neozed) memiliki bentuk fisik seperti tipe D dengan bentuk penyalur arus. Dalam penggunannya, sekering diazed selalu dilengkapi yang menyerupai botol susu berukuran mini. Gawai tersebut dapat mengamankan gangguan arus hubung singkat dan beban lebih pada kabel atau jaringan. Tabel 2.2 Klasifikasi pengaman lebur tipe ulir Ukuran Sekering Arus Kerja Diazed (A) D II D III D IV Tanda Warna Ukuran Sekering Neozed 2 Merah muda 4 Coklat 6 Hijau 10 Merah 16 Abu-abu 20 Biru 25 Kuning 35 Hitam 50 Putih 63 Tembaga 80 Perak 100 Emas D01 D02 Do3 Penggolongan sekering diazed dan neozed berdasarkan factor peleburan dan penggunaanya adalah : a. Kelas g (factor peleburan kecil) b. Kelas a (factor peleburan besar) Sedangkan penggolongan menurut IEC. 29 a. Kelas gl = Untuk perlindungan arus kerja kurang dari 100 A b. Kelas gll = Untuk perlindungan arus kerja 100 A atau lebih 1. Tipe pisau Sekering jenis ini merupakan sekering dengan kapasitas pemutusan tinggi. Memiliki bentuk kotak atau bulat berbahan keramik dengan pisau kotak pada kedua ujungnya. 2. Tipe tabung Sekering tabung merupakan pengaman lebur dengan kapasitas pemutusan yang variatif mulai yang tinggi sampai yang rendah. 3. Berdasarkan waktu kerjanya, sekering dapat dibedakan menjadi dua jenis, yaitu : 1. Sekering dengan aksi cepat, dengan simbol F 2. Sekering dengan aksi lambat, dengan simbol T Gambar 2.27 Bentuk Sekering atau Fuse 2.5.2 Push Button Dalam dunia industri terdapat berbagai macam jenis mesin, baik itu mesin produksi ataupun mesin penunjang, dengan cara kerja yang berbedabeda dan fungsi yang berbeda pula sehingga menghasilkan output atau hasil yang bervariasi. untuk menggerakan suatu mesin diperlukan suatu alat yang sangat banyak jenis dan ragamnya, salah satunya adalah Push Button atau saklar tekan, yang dapat memberikan sinyal listrik, sehingga mesin bisa hidup. 30 Gambar 2.28 Push Button Push Button, dalam bahasa Indonesianya yaitu saklar tekan, artinya alat ini bekerja dengan cara ditekan, alat ini sangat umum, banyak digunakan diberbagai mesin produksi yang terdapat diindustri-industri dan lainnya, alat ini juga paling mudah untuk dipelajari atau dipahami karena fungsi dan cara kerjanya yang sangat sederhana. Pada bagian atasnya terdapat knop yang berfungsi sebagai area penekan (warna merah), lalu disamping kiri dan kanan terdapat terminal, kontak normally open (no) dan normally close (nc) berfungsi sebagai terminal wiring untuk dihubungkan dengan alat listrik lainnya, lalu mempunyai kapasitas beban sekitar 5 A. Alat ini befungsi sebagai pemberi sinyal masukan pada rangkaian listrik, ketika / selama bagian knopnya ditekan maka alat ini akan bekerja sehingga kontak-kontaknya akan terhubung untuk jenis normally open dan akan terlepas untuk jenis normally close, dan sebaliknya ketika knopnya dilepas kembali maka kebalikan dari sebelumnya, untuk membuktikannya pada terminalnya bisa digunakan alat ukur tester / ohm meter. pada umumnya pemakaian terminal jenis NO digunakan untuk menghidupkan rangkaian dan terminal jenis NC digunakan untuk mematikan rangkaian, namun semuanya tergantung dari kebutuhan. 31 Seperti telah kita ketahui, alat ini sangat banyak digunakan, dalam sebuah operation panel bisa terdapat beberapa Push Button tergantung dari keperluan, alat ini juga memiliki kode warna pada bagian knopnya untuk membedakan fungsi dari masing-masing alat, seperti warna merah digunakan untuk tombol berhenti/stop, lalu warna hitam/hijau digunakan untuk tombol jalan/start kemudian warna kuning digunakan untuk tombol reset atau alarm stop, ada beberapa contoh penggunaan Push Button seperti untuk menjalankan motor/pompa, menjalankan conveyor, menghidupkan lampu, mereset alarm, menyalakan bell, menghidupkan cylinder dan masih banyak lagi. 2.5.3 Relay Relay adalah suatu peranti yang bekerja berdasarkan elektromagnetik untuk menggerakan sejumlah kontaktor (saklar) yang tersusun. Kontaktor akan tertutup (On) atau terbuka (Off) karena efek induksi magnet yang dihasilkan kumparan (induktor) ketika dialiri arus listrik. Berbeda dengan saklar dimana pergerakan kontaktor (On/Off) dilakukan manual tanpa perlu arus listrik. Sebagai komponen elektronika, relay mempunyai peran penting dalam sebuah sistem rangkaian elektronika dan rangkaian listrik untuk menggerakan sebuah perangkat yang memerlukan arus besar tanpa terhubung langsung dengan perangakat pengendali yang mempunyai arus kecil. Dengan demikian relay dapat berfungsi sebagai pengaman. Ada beberapa jenis relay berdasarkan cara kerjanya yaitu: 1. Normaly On : Kondisi awal kontaktor terturup (On) dan akan terbuka (Off) jika relay diaktifkan dengan cara memberi arus yang sesuai pada kumparan (coil) relay. Istilah lain kondisi ini adalah Normaly Close (NC). 2. Normaly Off : Kondisi awal kontaktor terbuka (Off) dan akan tertutup jika relay diaktifkan dengan cara memberi arus yang sesuai pada kumparan (coil) relay. Istilah lain kondisi ini adalah Normaly Open (NO). 32 3. Change-Over (CO) atau Double-Throw (DT) : Relay jenis ini memiliki dua pasang terminal dengan dua kondisi yaitu Normaly Open (NO) dan Normaly Close (NC). Dan berdasarkan terminalnya yaitu : 1. SPST (Single Pole Single Throw) : Relay ini memiliki empat terminal. Dua terminal kumparan (coil) dan dua terminal saklar (A dan B) yang dapat terhubung dan terputus. 2. SPDT (Single Pole Double Pole) : Relay ini memiliki lima terminal. Dua terminal kumparan (coil) dan tiga terminal saklar (A,B, dan C) yang dapat terhubung dan terputus dengan satu terminal pusat. Jika suatu saat terminal A terputus dengan terminal pusat (C) maka terminal lain (B) terhubung dengan terminal C, demikian juga sebaliknya. 3. DPST (Double Pole Single Throw) : Relay ini mempunyai enam terminal. Dua terminal kumparan (coil), dan empat terminal merupakan dua pasang saklar yang dapat terhubung dan terputus (A1 dan B1 - A2 dan B2). 4. DPDT (Double pole Double Throw) : Relay ini mempunyai delapan terminal. Dua terminal kumparan (coil), enam terminal merupakan dua set saklar yang dapat terputus dan terhubung (A1,B1,C1 dan A2, B2, C2) Gambar 2.29 Relay 33 2.5.4 Timer Timer atau penghitung waktu berfungsi sebagai alat penghitung waktu, manakala waktu yang telah ditetapkan tercapai maka output kontaknya akan bekerja. Ada dua macam jenis timer, pertama timer on delay kedua timer off delay. Timer on delay bekerja ketika tegangan supply masuk, sedangkan timer off delay bekerja pada saat tegangan supply terputus atau off. Gambar 2.30 Timer Pada saat timer ditenagai atau mendapatkan supply tegangan, maka timer akan mulai menghitung, ketika jumlah hitungan actual sama dengan setting ( jarum merah ), maka kontak output timer akan bekerja, Kontak timer berupa normally close (nc) dan normally open (no). 2.6 Peralatan Rangkaian Daya pada Pengasutan Motor Rotor Lilit Rangkaian daya pada sistem pengasutan ini digunakan untuk menghubungkan sumber daya dari jaringan ke beban ( motor induksi tiga fasa), sehingga pada rangkain inilah arus akan mengalir. Pada rangkaian daya, terdapat beberapa komponen utama seperti pengaman berupa MCB, penghantar arus (kabel daya) dan juga kontaktor. 34 2.6.1 MCB MCB sering disebut juga pengaman otomatis. Pengaman otomatis ini memutuskan sirkit secara otomatis apabila arusnya melebihi setting dari MCB tersebut. Pengaman otomatis dapat langsung dioperasikan kembali setelah mengalami pemutusan (trip) akibat adanya gangguan arus hubung singkat dan beban lebih. Berdasarkan waktu pemutusannya, pengaman-pengaman otomatis dapat terbagi atas Otomat-L, Otoma-H, dan Otomat-G. 1. Otomat-L (Untuk Hantaran) Pada Otomat jenis ini pengaman termisnya disesuaikan dengan meningkatnya suhu hantaran. Apabila terjadi beban lebih dan suhu hantarannya melebihi suatu nilai tertentu, elemen dwi logamnya akan memutuskan arusnya. Kalau terjadi hubung singkat, arusnya diputuskan oleh pengaman elekromagnetiknya. Untuk arus bolak-balik yang sama dengan 4 In-6 In dan arus searah yang sama dengan 8 In pemutusan arusnya berlangsug dalam waktu 0.2 sekon. 2. Otomat-H (Untuk Instalasi Rumah) Secara termis jenis ini sama dengan Otomat-L. Tetapi pengaman elektromagnetiknya memutuskan dalam waktu 0,2 sekon, jika arusnya sama dengan 2,5 In–3 In untuk arus bolak-balik atau sama dengan 4 In untuk arus searah. Jenis Otomat ini digunakan untuk instalasi rumah. Pada instalasi rumah, arus gangguan yang rendah pun harus diputuskan dengan cepat. Jadi kalau terjadi gangguan tanah, bagian-bagian yang terbuat dari logam tidak akan lama bertegangan. 3. Otomat-G Jenis Otomat ini digunakan untuk mengamankan motor-motor listrik kecil untuk arus bolak-balik atau arus searah, alat-alat listrik dan juga rangkaian akhir besar untuk penerangan, misalnya penerangan pabrik. Pengaman elektromagnetiknya berfungsi pada 8 In-11 In untuk arus bolakbalik atau pada 14 In untuk arus searah. Kontak-kontak sakelarnya dan ruang 35 pemadam busur apinya memiliki konstruksi khusus. Karena itu jenis Otomat ini dapat memutuskan arus hubung singkat yang besar, yaitu hingga 1500 A. Gambar 2.31. Konstruksi MCB (a) dan bagian-bagian MCB (b) Keterangan gambar (b) : 1. Tuas Operasi Strip 5. Bimetal 2. Aktuator Mekanis 6. Sekrup Kalibrasi 3. Kontak Bergerak 7. Kumparan magnetis 4. Terminal Bawah 8. Ruang busur api Cara kerja MCB 1. Thermis; prinsip kerjanya berdasarkan pada pemuaian atau pemutusan dua jenis logam yang koefisien jenisnya berbeda. Kedua jenis logam tersebut dilas jadi satu keping (bimetal) dan dihubungkan dengan kawat arus. Jika arus yang melalui bimetal tersebut melebihi arus nominal yang diperkenankan maka bimetal tersebut akan melengkung dan memutuskan aliran listrik. 2. Magnetik; prinsip kerjanya adalah memanfaatkan arus hubung singkat yang cukup besar untuk menarik sakelar mekanik dengan prinsip induksi elektromagnetis. Semakin besar arus hubung singkat, maka semakin besar gaya yang menggerakkan sakelar tersebut sehingga lebih cepat memutuskan rangkaian listrik dan gagang operasi akan kembali ke posisi off. Busur api yang terjadi masuk ke dalam ruangan yang berbentuk pelat-pelat, tempat busur api dipisahkan, didinginkan dan dipadamkan dengan cepat. 36 Gambar 2.32 Karakteristik MCB 2.6.2 Penghantar Penghantar yang digunakan adalah berupa kabel yang memiliki bermacam-macam jenisnya. Penghantar untuk instalasi lisrik telah diatur dalam PUIL 2000. Menurut PUIL 2000 pasal 7.1.1 Persyaratan umum penghantar, bahwa “semua penghantar yang digunakan harus dibuat dari bahan yang memenuhi syarat, sesuai dengan tujuan penggunaannya, serta telah diperiksa dan diuji menurut standar penghantar yang dikeluarkan atau diakui oleh instansi yang berwenang.” Dilihat dari jenisnya penghantar dibedakan menjadi: Kabel instalasi Kabel instalasi ini digunakan untuk instalasi penerangan, jenis kabel yang banyak digunakan untuk instalasi rumah tinggal yang pemasangannya tetap yaitu NYA dan NYM. Kabel tanah Terdapat dua jenis kabel tanah yaitu : a. Kabel tanah termoplastik tanpa perisai b. Kabel tanah bthermoplastik berperisai Kabel Fleksibel Kode Pengenal Kabel Huruf Kode Komponen 37 N Kabel jenis standar dengan tembaga sebagai penghantar NA Kabel jenis standar dengan aluminium sebagai penghanar Y Isolasi PVC re Penghantar padat bulat M Selubung PVC A Kawat Berisolasi rm Penghantar bulat berkawat banyak se Penghantar padat bentuk sektor sm Penghantar dipilin bentuk sektor -1 Kabel dengan sistem pengenal warna urat dengan hijau-kuning -0 Kabel dengan sistem pengenal warna urat tanpa hijau-kuning. 2.6.3 Kontaktor Kontaktor merupakan saklar daya yang bekerja berdasarkan kemagnitan, Bila koil(kumparan magnit) dialliri arus listrik, maka inti magnit menjadi jangkar, sekaligus menarik kontak-kontak yang bergerak, sehingga kontak NO(normally open) menjadi sambung, dan kontak NC (normally close) menjadi lepas. Gambar 2.33 Kontaktor 38 Kontaktor magnetik adalah bentuk relay listrik ditemukan pada kebanyakan motor bertenaga listrik. Mereka bertindak sebagai perantara untuk sumber daya langsung, dan motor listrik beban tinggi dalam rangka untuk menghomogenkan atau mengimbangi perubahan frekuensi listrik yang mungkin berasal dari power supply serta bertindak sebagai perlindungan. Perlu dicatat bahwa meskipun mereka serupa dalam desain, kontaktor magnetik tidak pemutus sirkuit. Mereka tidak memutuskan hubungan antara alat, dan sumber daya selama arus pendek. Mereka dipisahkan dari motor sehingga operator dapat bekerja dengan motor itu; membongkar atau mempertahankan itu, tanpa kemungkinan masih hidup saat melewati perangkat. Ketika listrik mengalir melalui kontaktor magnetik, hal itu menyebabkan elektromagnet untuk menghasilkan medan magnet yang kuat. Bidang ini menarik inti besi ke kumparan, dan menciptakan sebuah busur listrik. Listrik lewat di melalui satu kontak dan ke dalam perangkat orangtua kontaktor dalam cara ini. Untuk menonaktifkan, kontaktor dapat secara fisik ditarik dari perangkat induk. Juga, bila tidak ada arus listrik, pegas mendorong inti dari kumparan, memecahkan sambungan. 2.6.4 Resistor Resistor disebut juga dengan tahanan atau hambatan, berfungsi untuk menghambat arus listrik yang melewatinya. Satuan harga resistor adalah Ohm. Resistor terbagi menjadi dua macam, yaitu resistor tetap da resistor variable. Resistor tetap yaitu resistor yang nilai hambatannya relative tetap, biasanya terbuat dari karbon, kawat atau paduan logam. Nilai hambatannya ditentukan oleh tebalnya dan panjangnya lintasan karbon. Panjang lintasan karbon tergantung dari kisarnya alur yang berbentuk spiral. Pada dasarnya, resistor hanya ada dua macam, yakni resistor tetap (fixed resistor) dan resistor tidak tetap (variable resistor). 39 Resistor variabel (variable resistor atau varistor) : 1. Potensiometer (Potentiometer) Potensiometer dalah resistor tiga terminal yang nilai tahanannya dapat diubah dengan cara menggeser (untuk potensio jenis geser) atau memutar (untuk potensio jenis putar) tuasnya, penggunaan tuas dimaksudkan bahwa rangkaian yang menggunakan potensiometer ini sering dilakukan pengaturan, dan ditujukan untuk pemakai, pada pesawat televisi contoh bagian yang sering dilakukan pengaturan adalah bagian kontrol audio, brightness, contrast, dan color. Jenis potensiometer ada dua macam, yaitu linier (lin) dan logaritmik (log). Untuk jenis linier skala penggeseran tuas (untuk yang model geser) atau besarnya sudut pemutaran tuas (untuk yang model putar) proporsional atau berbanding lurus dengan perubahan tahananya. Sedangkan jenis logaritmik skala penggeseran tuas (untuk yang model geser) atau besarnya sudut pemutaran tuas (untuk yang model putar) tidak berbanding lurus tetapi sesuai dengan grafik fungsi logaritmik (sesuai hukum logaritma) terhadap perubahan tahananya, potensiometer logaritmik dapat dibuat dari potensiometer linier ditambah dengan resistor eksternal, karena potensiometer yang benar-benar logaritmik relatif sangat mahal, potensiometer logaritmik lazim digunakan pada pengatur volume audio. 2. Trimpot (Trimmer Potentiometer) Trimpot adalah potensiometer yang cara mengubah nilai tahanannya dengan cara mentrim dengan menggunakan obeng trim. Pada televisi, trimpot biasanya digunakan untuk mengatur besaran arus pada rangkaian oscilator, rangkaian driver, atau pada penyetelan keseimbangan putih (white balance). bagian-bagian yang menggunakan trimpot berarti bagian tersebut tidak sering dilakukan penyetelan dan biasanya hanya ditujukan untuk maintenance. 40 3. PTC (Positive Temperatur Coefisien ) PTC termasuk jenis thermistor, yaitu resistor yang nilai tahanannya dipengaruhi oleh suhu. Nilai hambatan PTC saat dingin adalah sangat rendah, tetapi saat suhu PTC naik maka nilai hambatannya juga ikut naik. Pada pesawat televisi PTC biasanya digunakan untuk memberikan suplay tegangan pada kumparan degausing (degausing coil). 4. NTC (Negative Temperatur Coefisien ) NTC juga termasuk jenis thermistor, yaitu resistor yang nilai tahanannya dipengaruhi oleh suhu, tetapi NTC kebalikan dari PTC, dimana nilai tahanan NTC saat dingin sangat tinggi, tetapi saat suhu NTC semakin naik, maka nilai tahanannya akan semakin mengecil bahkan nol. Pada pesawat televisi NTC biasanya dipasang pada terminal masukan listrik, ini dimaksudkan untuk mengurangi kejutan tegangan pada rangkaian power suply, sehingga efek yang ditimbulkan dari penambahan NTC ini adalah sebuah kondisi yang disebut sebagai “soft start”. 5. LDR (Light Dependen Resistor) LDR adalah merupakan resistor peka cahaya atau biasa disebut dengan fotoresistor, dimana nilai resistansinya akan menurun jika ada penambahan intensitas cahaya yang mengenainya. Fotoresistor dibuat dari semikonduktor beresistansi tinggi. Jika cahaya yang mengenainya memiliki frekuensi yang cukup tinggi, foton yang diserap oleh semikonduktor akan menyebabkan elektron memiliki energi yang cukup untuk meloncat ke pita konduksi. Elektron bebas yang dihasilkan (dan pasangan hole-nya) akan mengalirkan listrik, sehingga menurunkan resistansinya. 41 Resistor Tetap (fixed resistor): 1. Resistor Kawat Resistor kawat adalah jenis resistor generasi pertama yang lahir pada saat rangkaian elektronika masih menggunakan tabung hampa (vacuum tube). Bentuknya bervariasi dan memiliki ukuran yang cukup besar. Resistor kawat ini biasanya banyak dipergunakan dalam rangkaian power karena memiliki resistansi yang tinggi dan tahan terhadap panas yang tinggi. Jenis lainnya yang masih dipakai sampai sekarang adalah jenis resistor dengan lilitan kawat yang dililitkan pada bahan keramik, kemudian dilapisi dengan bahan semen. Rating daya yang tersedia untuk resistor jenis ini adalah dalam ukuran 1 watt, 2 watt, 5 watt, 10 watt,20 watt dan 30 watt. Pengenal nilai pada resistor inio biasanya berupa daya (P) dan resistansi (R) atau arus (I) dan resistansi (R).terdapat beberapa persamaan yang dapat digunakan untuk menghitung resistor, yaitu : P = V.I .................................................................................(2.7) P = I2.R ...........................................................................(2.8) P= ......................................................................................(2.9) 20W/20Ω 20Ω/2A Gambar 2.34 Resistor dan nilai pengenalnya 2. Resistor Batang Karbon (Arang) Resistor ini dibuat dari bahan karbon kasar yang diberi lilitan kawat yang kemudian diberi tanda dengan kode warna berbentuk gelang dan pembacaannya dapat dilihat pada tabel kode warna. Jenis resistor ini 42 juga merupakan jenis resistor generasi awal setelah adanya resistor kawat. Sekarang sudah jarang untuk dipakai pada rangkaian – rangkaian elektronika. Bentuk dari resistor jenis ini dapat dilihat pada gambar di samping. 3. Resistor Keramik atau Porselin Dengan adanya perkembangan teknologi di bidang elektronika, saat ini telah dikembangkan jenis resistor yang terbuat dari bahan keramik atau porselin. Kemudian, dengan perkembangan yang ada, telah dibuat jenis resistor keramik yang dilapisi dengan kaca tipis. Jenis resistor ini telah banyak digunakan dalam rangkaian elektronika saat ini karena bentuk fisiknya kecil dan memiliki resistansi yang tinggi. Resistor ini memiliki rating daya sebesar 1/4 watt, 1/2 watt, 1 watt, dan 2 watt. Bentuk dari resistor ini dapat dilihat pada gambar di samping. 4. Resistor Film Karbon Resistor film karbon ini adalah resistor hasil pengembangan dari resistor batang karbon. Sejalan dengan perkembangan teknologi, para produsen komponen elektronika telah memunculkan jenis resistor yang dibuat dari bahan karbon dan dilapisi dengan bahan film yang berfungsi sebagai pelindung terhadap pengaruh luar. Nilai resistansinya dicantumkan dalam bentuk kode warna. Resistor ini juga sudah banyak digunakan dalam berbagai rangkaian elektronika karena bentuk fisiknya kecil dan memiliki resistansi yang tinggi. Namun, untuk masalah ukuran fisik, resistor ini masih kalah jika dibandingkan dengan resistor keramik. Resistor ini memiliki rating daya sebesar 1/4 watt, 1/2 watt, 1 watt, dan 2 watt. Bentuk dari resistor ini dapat dilihat pada gambar di samping. 43 5. Resistor Film Metal Resistor film metal dibuat dengan bentuk hampir menyerupai resistor film karbon. Resistor tahan terhadap perubahan temperatur. Resistor ini juga memiliki tingkat kepresisian yang tinggi karena nilai toleransi yang tercantum pada resistor ini sangatlah kecil, biasanya sekitar 1% atau 5%. Jika dibandingkan dengan resistor film karbon, resistor film metal ini memiliki tingkat kepresisian yang lebih tinggi dibandingkan dengan resistor film karbon karena resistor film metal ini memiliki 5 buah gelang warna, bahkan ada yang 6 buah gelang warna. Sedangkan, resistor film karbon hanya memiliki 4 buah gelang warna. Resistor film metal ini sangat cocok digunakan dalam rangkaian – rangkaian yang memerlukan tingkat ketelitian yang tinggi, seperti alat ukur. Resistor ini memiliki rating daya sebesar 1/4 watt, 1/2 watt, 1 watt, dan 2 watt.