Deteksi Sinyal Elektromyogram (EMG) - e
advertisement
 - e")
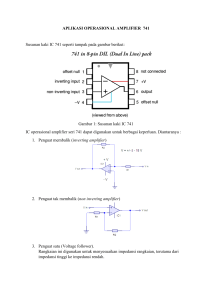
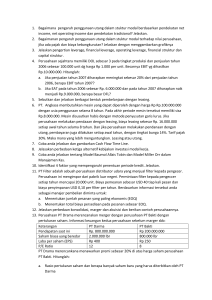
SEMINAR NASIONAL TEKNOLOGI 2015 Institut Teknologi Nasional Malang ISSN: 2407 – 7534 Deteksi Sinyal Elektromyogram (EMG) Saat Kontraksi Dan Relaksasi Dengan Personal Komputer Irmalia Suryani Faradisa 1, Pandu Noortyas 2 1,2) Program Studi Teknik Elektro, ITN Malang 1) e-mail: [email protected], 2) [email protected] ABSTRAK Salah satu organ tubuh yang mengeluarkan sinyal-sinyal biopotensial adalah otot. Sinyal biopotensial yang dikeluarkan oleh otot ini dapat digunakan untuk mengetahui kelainan pada otot. Untuk menangkap sinyal-sinyal yang dikeluarkan oleh otot diperlukan suatu alat yang disebut dengan electromyograph (EMG). EMG bekerja dengan menangkap frekuensi sinyal-sinyal listrik yang dibangkitkan oleh otot akibat adanya aktivitas subjek. Alat pendeteksi dan perekam sinyal biopotensial otot ini terdiri dari sensor elektroda kulit yang ditempatkan pada kulit di atas otot, selisih tegangan yang ditangkap oleh elektroda inilah yang kemudian dikuatkan dan selanjutnya melalui proses filterisasi. Kemudian sinyal analog ini diubah menjadi sinyal digital dan diolah oleh mikrokontroller untuk selanjutnya ditampilkan pada personal komputer. Data yang ditampilkan pada software berupa sinyal biopotensial otot. Dari tampilan didapatkan perbedaan bentuk sinyal pada saat otot kotraksi dan pada saat otot relaksasi. Kata kunci: Elektroda Ag-AgCl, Metode Penempatan Elektroda, EMG ABSTRACT One of the organs that secrete signals biopotential is muscle. Biopotential signal issued by the muscle can be used to determine abnormalities in the muscle. To capture the signals issued by the muscles needed a tool called the electromyograph (EMG). EMG works by capturing the frequency of the electrical signals generated by the muscles due to the activity of the subject. The detector and recorder signals biopotential muscle consists of a sensor skin electrodes placed on the skin over the muscle, the voltage difference is captured by the electrodes is then amplified and then through the process of filtration. Then the analog signal is converted into digital signals and processed by a microcontroller which will be displayed on a personal computer. The data displayed on the software in the form of muscle biopotential signal. From the view is available difference from signal shape at the time contraction and the time relaxation. Keywords: Ag-AgCl Electrode, Electrode Placement Method, EMG Pendahuluan Elektronika sangat diperlukan dalam berbagai bidang kehidupan. Dalam ilmu pengetahuan medis contohnya, hal ini menuntut peralatan yang dapat menunjang evektifitas penelitian, pemeriksaan serta terapi medis. Konsekuensi dari ini semua adalah dibutuhkannya peralatan medis yang semakin canggih serta efisien. Salah satu alat yang digunakan dalam dunia medis adalah Electromyograph, yaitu alat yang digunakan oleh dokter-dokter ahli dalam bidang Physiatry dan Neurologi. SENATEK 2015 | Malang, 17 Januari 2015 428 SEMINAR NASIONAL TEKNOLOGI 2015 Institut Teknologi Nasional Malang ISSN: 2407 – 7534 Perekaman gelombang otot sampai saat ini hanya bisa dilakukan di rumah sakit saja. Ini karena alat EMG yang ada sangat mahal harganya,dan biaya untuk perekaman sinyal otot juga mahal sehingga diperlukan sebuah EMG yang portable dan mudah dioperasikan. Berdasarkan latar belakang di atas, maka dapat dirumuskan permasalahan yaitu: 1. Bagaimana merencanakan dan membuat sebuah alat yang mampu menampilkan sinyal biopotensial. 2. Bagaimana membuat dan merencanakan sebuah sistem yang dapat mendeteksi dan merekam sinyal biopotensial otot sehingga nantinya dapat diolah dalam bentuk data digital sesuai yang dibutuhkan oleh mikrokontroller sehingga bentuk sinyal nanti dapat ditampilkan di PC (Personal Computer). Metode Penelitian Penentuan Spesifikasi Alat Spesifikasi alat secara global ditetapkan terlebih dahulu sebagai acuan dalam perancangan selanjutnya. Spesifikasi alat yang direncanakan adalah sebagai berikut : Sensor Elektroda Sensor elektroda Ag-AgCl, berfungsi sebagai sinyal sensor pengubah biopotensial yang dipancarkan neuron-neuron dalam otot menjadi sinyal listrik yang dapat diumpankan ke rangkaian penguat. Pengkondisi Sinyal Pengkondisi sinyal pada alat ini terdiri dari : Penguat instrumentasi berfungsi sebagai penguat selisih tegangan dari tiga lokasi penempatan elektroda sekaligus menghilangkan noise dari kedua masukan. Penguat non inverting berfungsi memberikan penguatan tingkat kedua kepada sinyal yang telah melalui penguat instrumentasi. Rangkaian Filter a) High Pass Filter. Digunakan untuk meredam sinyal dengan frekuensi 10 Hz dan meloloskan sinyal di atasnya. b) Low Pass Filter. Digunakan untuk meredam sinyal dengan frekuensi 1000 Hz dan meloloskan sinyal di bawahnya. c) Notch Filter. Digunakan untuk meredam sinyal dengan frekuensi 50 Hz. Non Inverting Amplifier Berfungsi menguatkan tegangan output dari rangkaian filter sebesar 100 kali. Mikrokontroller AT Mega8535 Berfungsi untuk menerima sinyal analog gelombang dari sensor elektrode yang akan diproses dan mengirimkan data digital yang telah diproses ke komputer melalui konektor DB9. Personal Computer Berfungsi untuk menyimpan semua data yang dibutuhkan dan mengolah informasi yang diterima dari komunikasi serial serta menampilkan menggunakan program Delphi. Studi literature Studi literatur dilakukan untuk mempelajari teori penunjang sistem yang dibutuhkan dalam perencanaan dan pembuatan alat. Hal ini dilakukan dengan mencari referensi–referensi yang berhubungan dengan perencanaan dan pembuatan alat yang akan dibuat. Teori yang diperlukan antara lain berkaitan dengan otot lengan, prinsip kerja sensor elektroda kulit, rangkaian pengkondisi sinyal, filter, non inverting amplifier, mikrokontroller AT Mega8535, antarmuka dan display sistem pada PC melalui komunikasi serial (DB9) menggunakan program Delphi. SENATEK 2015 | Malang, 17 Januari 2015 429 SEMINAR NASIONAL TEKNOLOGI 2015 Institut Teknologi Nasional Malang ISSN: 2407 – 7534 Perancangan dan Pembuatan Alat Perancangan dan pembuatan alat dalam penelitian ini dibagi menjadi dua bagian, yaitu hardware dan software. Sebelum melaksanakan pembuatan terhadap alat, dilakukan perancangan terhadap alat yang meliputi merancang rangkaian keseluruhan alat, serta perancangan terhadap software. Pada tahap pembuatan alat, dilakukan perakitan sistem terhadap seluruh hasil rancangan yang telah dibuat. Pengambilan Sampel Pengambilan sampel dilakukan dengan metode random sample terhadap sekelompok orang yang memiliki otot yang normal dan sekelompok orang yang memiliki kelainan terhadap ototnya. Pengujian Alat Untuk menganalisis kinerja alat apakah sesuai dengan yang direncanakan maka dilakukan pengujian alat. Pengujian dilakukan pada masing-masing bagian dan kemudian secara keseluruhan sistem. Pengolahan Data Mengolah data dan menganalisa hasil pengujian alat untuk dapat menarik kesimpulan dari penelitian. Pengambilan Kesimpulan Kesimpulan didapat berdasarkan hasil perealisasian Electromyograph (EMG) Sebagai Pendeteksi Otot Yang Terintegrasi Dengan Personal Komputer Berbasis Mikrokontroller AT Mega8535. Beberapa hasil pengujian disampaikan dalam kesimpulan disertai realita yang disusun secara berurutan. Hasil dan Pembahasan Agar perancangan dan perealisasian alat berjalan secara sistematis maka perlu dirancang blok diagram yang menjelaskan sistem yang dirancang dibuat secara garis besar. Gambar.1 menunjukkan blok diagram sistem. Sensor Elektroda Pengkondisi Sinyal Rangkaian Filter Instrumentasi Amplifier Notch Filter ATmega 8535 PC Mikrokontroller Low Pass Filter High Pass Filter Non Inverting Amplifier Main Amplifier Gambar 1. Blok Diagram Electromyograph (EMG) SENATEK 2015 | Malang, 17 Januari 2015 430 SEMINAR NASIONAL TEKNOLOGI 2015 Institut Teknologi Nasional Malang ISSN: 2407 – 7534 1. 2. 3. 4. 5. 6. Fungsi dari tiap tiap blok diagram dijelaskan sebagai berikut: Elektroda Ag-AgCl Berfungsi untuk menangkap sinyal biolistrik otot yang terdapat pada permukaan kulit. Pengkondisi Sinyal Pengkondisi sinyal terdiri dari: a) Penguat instrumentasi berfungsi sebagai penguat selisih tegangan dari dua lokasi penempatan elektroda sekaligus menghilangkan sinyal noise dari kedua masukan. Rangkaian Filter a) Notch Filter. Digunakan untuk meredam sinyal dengan frekuensi 50 Hz b) Low Pass Filter. Digunakan untuk meredam sinyal dengan frekuensi 1000 Hz dan meloloskan sinyal dibawahnya c) High Pass Filter. Digunakan untuk meredam sinyal dengan frekuensi 10 Hz dan meloloskan sinyal diatasnya Main Amp Penguat bertujuan untuk mengurangi error yang akan terjadi jika penguatan dibebankan hanya kepada rangkaian penguat instrumentasi dan filter. Mikrokontroller Berfungsi menerima sinyal analog gelombang alfa dan beta dan mengirimkan data digital ke komputer melalui konektor DB9 Personal Komputer Berfungsi untuk menyimpan semua data yang dibutuhkan dan mengolah informasi yang diterima dari komunikasi serial serta menampilkan data dengan menggunakan program Delphi. Perencanaan sensor elektroda Untuk dapat menangkap sinyal biopotensial otot yang terdapat pada kulit maka dibutuhkan tiga buah sensor elektroda jenis Ag-Agcl yang ditempelkan pada kulit, Output dari ketiga elektroda tersebut dimasukkan ke kaki penguat instrumentasi AD620 dan driver leg right. Gambar 2. Perancangan sensor elektroda Ag-Agcl Perancangan penguat instrumentasi Pelepasan gelombang oleh single motor unit (SMU) yang disadap oleh electrode sangat kecil. Untuk menampilkan sinyal tersadap tersebut dibutuhkan penguatan yang sangat besar. Rangkaian penguat instrumentasi yang direncanakan seperti yang terlihat dalam Gambar 3 di bawah: SENATEK 2015 | Malang, 17 Januari 2015 431 SEMINAR NASIONAL TEKNOLOGI 2015 Institut Teknologi Nasional Malang ISSN: 2407 – 7534 Gambar 3. Rangkaian penguat instrumentasi dengan menggunakan AD620 Perencanaan Notch filter Notch filter adalah filter yang melewatkan semua frekuensi kecuali stop band (pita henti) yang terpusat pada frekuensi pusat. Biasanya dibuat untuk memperlemah atau menghilangkan frekuensi noise 50 Hz yang dihasilkan power supply. Rangkaian notch filter menggunakan IC LM301 yang ditunjukkan seperti dalam gambar 4. Gambar 4. Rangkaian Notch Filter Perancangan Low Pass Filter Filter low pass dirancang untuk melewatkan sinyal di bawah frekuensi tertentu dan menolak semua sinyal di atas pita ini. Maka didapatkanlah komponen-komponen dengan nilainilai komponen yang digunakan adalah R1 = R2 = 4,825 KΩ dan R3 = 47 KΩ. Gambar 5. Rangkaian Low Pass Filter SENATEK 2015 | Malang, 17 Januari 2015 432 SEMINAR NASIONAL TEKNOLOGI 2015 Institut Teknologi Nasional Malang ISSN: 2407 – 7534 Perancangan High Pass filter Filter high pass dirancang untuk melewatkan sinyal di atas frekuensi tertentu dan menolak semua sinyal dibawah pita ini. Jika nilai C1 dan C2 ditentukan sebesar 15nF. Dengan pertimbangan komponen yang ada dipasar maka menggunakan pada penggunaan resistor untuk notch filter antara lain R1 = R3 = 1MΩ, R2 = 500 K. Gambar 6. Rangkaian High Pass Filter Perancangan Penguat non inverting Pada Perancangan ini, penguat non inverting yang berfungsi sebagai penguat sinyal tingkat kedua. Ini bertujuan untuk mengurangi error yang akan terjadi jika penguatan dibebankan hanya kepada rangkaian penguat instrumentasi dan filter. Gambar 7. Rangkaian OpAmp Non Inverting Perancangan Mikrokontroller Gambar 8. Sistem Mikrokontroller ATMega8535 SENATEK 2015 | Malang, 17 Januari 2015 433 SEMINAR NASIONAL TEKNOLOGI 2015 Institut Teknologi Nasional Malang ISSN: 2407 – 7534 Hasil Pengujian Pengujian rangkaian Notch Filter Tabel 1. Pengujian Rangkaian Notch Filter Gambar 9. Grafik Tanggapan Rangkaian Notch Filter Pengujian rangkaian Low Pass Filter Tabel 2. Tanggapan Frekuensi Low Pass Filter Gambar 10. Grafik Tanggapan Frekuensi Low Pass Filter Pengujian Rangkaian High Pass Filter Tabel 3. Tanggapan Frekuensi High Pass Filter Gambar 11. Grafik Tanggapan Frekuensi High Pass Filter SENATEK 2015 | Malang, 17 Januari 2015 434 SEMINAR NASIONAL TEKNOLOGI 2015 Institut Teknologi Nasional Malang ISSN: 2407 – 7534 Pengujian Rangkaian Non Inverting Tabel 4. Pengujian Rangkaian Non Inverting Gambar 12. Tampilan Osiloskop Tanggapan Frekuensi Non inverting Pengujian Sistem Pengujian seluruh sistem ini bertujuan untuk mengetahui output dari rangkaian analog, apakah sudah sesuai dengan frekuensi biopotensial otot. Sehingga data yang diolah oleh mikrokontroller benar-benar data biopotensial otot. Tabel 5. Tabel Hasil Pengujian Rangkaian Analog Dengan Osiloskop Gambar 13. Tampilan Osiloskop Hasil Pengujian Rangkaian Analog Gambar 14. Tampilan sinyal EMG pada software Gambar 15. Tampilan Sinyal Biopotensial Otot Menggunakan Modul Biopac MP30 Dari hasil tampilan sinyal biopotensial otot dapat terlihat adanya perbedaan bentuk sinyal pada saat kontraksi dan pada saat relaksasi. SENATEK 2015 | Malang, 17 Januari 2015 435 SEMINAR NASIONAL TEKNOLOGI 2015 Institut Teknologi Nasional Malang ISSN: 2407 – 7534 Kesimpulan Setelah dilakukan proses perancangan dan pembuatan serta pegujian alat maka dapat diambil kesimpulan: 1. Untuk rangkaian notch filter, high pass filter, low pass filter dapat dilihat dari hasil pengujian bahwa rangkaian dapat bekerja dengan baik sesuai dengan referensi. 2. Untuk rangkaian penguat non-inverting terdapat persentase error sebesar 2,646 %, hal ini dikarenakan perbedaan nilai komponen pada perancangan karena terbatasnya komponen yang ada dipasaran. 3. Pada pengujian rangkaian analog didapatkan range frekuensi yang sesuai dengan frekuensi biopotensial otot. 4. Pada hasil tampilan sinyal biopotensial otot terdapat perbedaan sinyal pada saat kontraksi dan pada saat relaksasi. Daftar Pustaka 1. 2. 3. 4. 5. 6. Okky Andriawan, Irmalia Suryani F,2011, Rancang Bangun Elektoenchephelogaph (EEG) sebagai perekam dan pendeteksi Sinyal Biolistrik Otak yang terintegrasi dengan PC berbasis Mikrokontroller, Jurnal Elektro Eltek Vol 2 No April 2011 Coughlin Robert F ,1992 “ Penguat Operasional Dan Rangkaian Terpadu Linear “, Erlangga , Jakarta Delorenzo Bimomedical Practical Guide, Delorenzo.Inc.,2007, Italy Delorenzo Filters Practical Guide, Delorenzo.Inc.,2007, Italy John G.Webster,’ Medical Instrumentation Application And Design,’,John wiley & Son,1998 ‘ Lingga Wardana.2006. “Belajar sendiri mikrokontroller seri AVR, simulasi dan hard ware”, Yogyakarta: Andi SENATEK 2015 | Malang, 17 Januari 2015 436