ABSTRAK Shoulder wheel merupakan suatu peralatan terap
advertisement

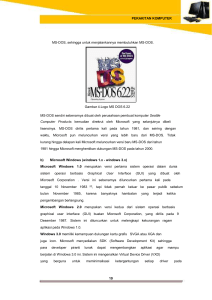
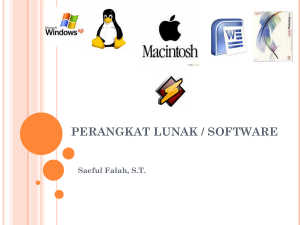
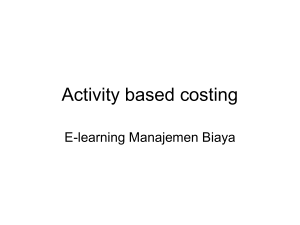
SHOULDER WHEEL Silvi Eka Monica[1], Andjar Pudji [2] dan Dyah Titisari [3] ABSTRAK Shoulder wheel merupakan suatu peralatan terapi yang digunakan untuk melatih pergerakan sendi pada bahu dan mencegah mengecilnya otot. Alat ini memanfaatkan putaran motor untuk membantu pasien dalam menggerakkan lengan sehingga penyempitan pembuluh darah pada daerah ini akan berkurang dan mengecilnya otot pada pasien dapat dicegah dan diharapkan dapat bergerak seperti kondisi normal. Shoulder wheel adalah salah satu alat terapi yang dapat diatur besar sudutnya sesuai dengan kebutuhan pasien, sehingga pasien dapat melakukan terapi dengan sendirinya atau dengan bantuan operator Shoulder wheel dapat digunakan untuk memberikan motivasi pada penderita dalam melakukan latihan lingkup gerak sendi bahu secara aktif. Cara penggunaannya yaitu penderita berdiri sedemikian rupa agar aksis sendi bahu sama dengan aksis roda pemutar, sehingga gerak lengan sesuai dengan gerakan putaran roda. Penderita tidak diharuskan menggerakkan roda secara penuh, tetapi gerakan hanya dilakukan sebesar kemampuan gerakan sendi bahunya. Dengan meletakkan siku pada aksis roda maka gerakan dapat dilakukan sampai pada keterbatasan lingkup gerak sendi. Berdasarkan hasil pengukuran, beban tangan pasien berpengaruh pada arus dan tegangan yang dikeluarkan oleh driver motor. Semakin berat beban tangan pasien maka arus dan tegangan pada output driver motor semakin berkurang. Kata Kunci : Frozen Shoulder, Shoulder Wheel, Driver Motor, dan ATmega328 PENDAHULUAN Latar Belakang Masalah Frozen shoulder merupakan rasa nyeri yang mengakibatkan keterbatasan lingkup gerak sendi (LGS) pada bahu. Rasa nyeri ini timbul karena adanya trauma dan juga timbul secara perlahan-lahan tanpa tanda-tanda atau riwayat trauma. Keluhan utama yang dialami adalah nyeri dan penurunan kekuatan otot, penggerak sendi bahu dan keterbatasan LGS baik secara aktif atau pasif. Salah satu terapi yang bisa mengurangi gangguan pada bahu adalah dengan menggunakan alat shoulder wheel (Eko Setyawan, 2015). Shoulder wheel merupakan suatu peralatan terapi yang digunakan untuk melatih pergerakan sendi pada bahu dan mencegah mengecilnya otot. Alat ini memanfaatkan putaran motor untuk membantu pasien dalam menggerakkan lengan sehingga penyempitan pembuluh darah pada daerah ini akan berkurang dan mengecilnya otot pada pasien dapat dicegah dan diharapkan dapat bergerak seperti kondisi normal (Lisa Nalurani, 2014). Shoulder wheel dapat digunakan untuk memberikan motivasi pada penderita dalam melakukan latihan lingkup gerak sendi bahu secara aktif. Cara penggunaannya yaitu penderita berdiri sedemikian rupa agar aksis sendi bahu sama dengan aksis roda pemutar, sehingga gerak lengan sesuai dengan gerakan putaran roda. Penderita tidak diharuskan menggerakkan roda secara penuh, tetapi gerakan hanya dilakukan sebesar kemampuan gerakan sendi bahunya. Pada waktu melakukan gerakan endorotasi maupun eksorotasi bahu dalam posisi abduksi 90º dan fleksi 90º. Dengan meletakkan siku pada aksis roda maka gerakan dapat dilakukan sampai pada keterbatasan lingkup gerak sendi (Sianturi, 2003). Alat shoulder wheel ini sudah pernah dibuat oleh Lisa Nalurani, 2014 dengan tampilan seven segment dan dilengkapi dengan setting timer dan setting kecepatan, namun dalam pelaksanaan terapi pada alat ini belum maksimal karena tidak dilengkapi setting sudut sehingga tidak bisa disesuaikan dengan kebutuhan pasien. Berdasarkan identifikasi masalah tersebut penulis ingin mengembangkan alat terapi yaitu Shoulder Wheel dengan inovasi baru sehingga pasien bisa melakukan terapi pada bahu kanan maupun kiri dengan tampilan LCD yang dilengkapi setting timer dan setting sudut sehingga alat bisa disesuaikan dengan kebutuhan pasien dan kecepatan yang disetting konstan. Batasan Masalah 1.2.1 Menggunakan driver motor 1.2.2 Menggunakan IC Mikrokontroler AT Mega 328 1.2.3 Menggunakan LCD 2x16 cm 1.2.4 Pemilihan timer 10, 20, 30 menit 1.2.5 Pemilihan sudut 15º, 30º, 45º, 60º dan 90º Rumusan Masalah Dapatkah dibuat alat fisioterapi “Shoulder Wheel” untuk terapi pada bahu? Tujuan Penelitian 1. Tujuan Umum Dibuatnya alat fisioterapi “Shoulder Wheel” untuk terapi pada bahu. 2. Tujuan Khusus 2.1 Membuat alat fisioterapi shoulder wheel 2.2 Membuat program mikrokontroler 2.3 Melakukan perancangan 2.4 Melakukan uji coba alat Manfaat Penelitian Manfaat Teoritis Dapat menambah pengetahuan di bidang elektromedik khususnya alat fisioterapi pada pasien yang mengalami frozen shoulder. Manfaat Praktis Mengoptimalkan penggunaan alat fisioterapi pada pasien yang mengalami frozen shoulder dan meningkatkan kualitas pelayanan khususnya pada pasien yang mengalami frozen shoulder. METODOLOGI PENELITIAN Diagram Blok Sistem Diagram Mekanis Alat PENGAMBILAN PENGUJIAN DATA DAN 30º 45º 60º 90º 4.1 Hasil Pengambilan Data 4.1.1 Jumlah Gerakan yang Diperoleh dari Setiap Setting Sudut dan Setting Timer. 60º 91 381 271 210 571 406 315 3 mA 3 mA 3 mA 3 mA Tabel 4.3 Pengukuran Tegangan Pada Input Driver Motor ( TP2) 90º 75 Dengan Beban 15º 30º 45º 188 134 103 60º 88 90º 73 Sudut 181 150 378 268 208 178 148 271 225 568 404 313 268 223 15º 30º 45º 60º 90º Berdasarkan tabel 4.1 dapat disimpulkan jika sudut disetting up maka jumlah gerakannya semakin sedikit dan jika sudut disetting down maka jumlah gerakannya semakin banyak. Sebaliknya, jika waktu disetting down maka jumlah gerakannya semakin sedikit dan jika waktu disetting up maka jumlah gerakannya semakin banyak. Beban berpengaruh terhadap jumlah gerakan, jika tanpa beban jumlah gerakannya bertambah dan jika dengan beban jumlah gerakannya berkurang. 3 mA 3 mA 3 mA 3 mA 4.1.2.2 Pengukuran Tegangan Pada Input Driver Motor (TP 2) Tabel 4.1 Jumlah gerakan yang diperoleh dari setiap setting sudut dan setting timer. Sudut 10 menit 20 menit 30 menit 3 mA 3 mA 3 mA 3 mA Berdasarkan tabel 4.2 arus pada input driver menunjukkan bahwa beban tidak berpengaruh terhadap arus yang masuk ke driver motor. Untuk pengambilan data jumlah gerakan diperoleh dari perhitungan jumlah gerakan naik turun dalam setiap settingan sudut dan settingan waktu. Tanpa Beban 15º 30º 45º 191 136 105 3 mA 3 mA 3 mA 3 mA Tegangan Input Driver Motor Tanpa Beban Dengan Beban Putar Putar Putar Putar Kiri Kanan Kiri Kanan 4,9 V 5,00 V 5,01 V 4,8 V 4,8 V 4,7 V 4,8 V 4,8 V 5,00 V 5,00 V 4,9 V 5,00 V 5,02 V 4,9 V 5,02 V 5,01 V 4,9 V 4,9 V 4,9 V 4,9 V Berdasarkan tabel 4.3 tegangan pada input driver menunjukkan bahwa beban tidak berpengaruh terhadap arus yang masuk ke driver motor. 4.1.2.3 Pengukuran PWM 1 Pada Input Driver Motor (TP 3) 4.1.2 Pengukuran Input Driver Motor 4.1.2.1 Pengukuran Arus Pada Input Driver Motor (TP 1) Tabel 4.2 Pengukuran Arus Pada Input Driver Motor (TP 1) Arus Input Driver Motor Sudut Tanpa Beban Dengan Beban Putar Putar Putar Putar Kiri Kanan Kiri Kanan 15º 3 mA 3 mA 3 mA 3 mA Gambar 4.1 Input driver motor pada pwm1 4.1.2.4 Pengukuran PWM 2 Pada Input Driver Motor (TP 4) 4.1.3.2 Pengukuran Tegangan Pada Output Driver Motor (TP 6) Tabel 4.5 Pengukuran Tegangan Pada Output Driver Motor (TP 6) Sudut Gambar 4.2 Input driver motor pada pwm2 4.1.3 Pengukuran Output Driver Motor 4.1.3.1 Pengukuran Arus Pada Output Driver Motor (TP 5) Tabel 4.4 Pengukuran Arus Pada Output Driver Motor (TP 5) Sudut 15º 30º 45º 60º 90º Arus Output Driver Motor Tanpa Beban Dengan Beban Putar Putar Putar Putar Kiri Kanan Kiri Kanan 288 mA 290 mA 285 mA 287 mA 287 mA 291 mA 286 mA 288 mA 287 mA 293 mA 285 mA 290 mA 289 mA 291 mA 287 mA 289 mA 287 mA 292 mA 286 mA 290 mA Berdasarkan tabel 4.4 arus pada output driver menunjukkan bahwa beban berpengaruh terhadap arus yang dikeluarkan oleh driver. Karena ketika modul diberi beban, prinsip kerja motor bekerja lebih keras untuk mengangkat beban atau melakukan putaran motor sehingga arus yang dikeluarkan oleh driver berkurang. 15º 30º 45º 60º 90º Tegangan Output Driver Motor Tanpa Beban Dengan Beban Putar Kiri Putar Putar Putar Kanan Kiri Kanan -4,87 V 4,98 V -4,79 V 4,88 V -4,98 V 5,00 V -4,98 V 4,90 V -4,99 V 5,01 V -4.98 V 4,92 V -5,01 V 5,03 V -4,98 V 4,95 V -5,00 V 5,03 V -4,99 V 4,98 V Berdasarkan tabel 4.5 tegangan pada output driver menunjukkan bahwa beban berpengaruh terhadap tegangan yang dikeluarkan oleh driver. Karena ketika modul diberi beban, prinsip kerja motor bekerja lebih keras untuk mengangkat beban atau melakukan putaran motor sehingga arus yang dikeluarkan oleh driver berkurang. Dan tegangan yang dikeluarkan oleh driver ketika motor berputar ke kiri menjadi (-), karena ketika motor berbalik arah, kutub tegangannya juga harus dibalik yang awalnya (+) menjadi (-). Dan settingan sudut juga berpengaruh terhadap tegangan yang dikeluarkan oleh driver. Ketika disetting sudut yang lebih besar, tegangan yang dikeluarkan akan lebih besar pula, karena waktunya lebih lama untuk menstabilkan tegangan. 4.1.3.3 Pengukuran PWM 1 Pada Output Driver Motor (TP 7) Gambar 4.3 Output driver pada pwm 1 4.1.3.4 Pengukuran PWM 2 Pada Output Driver Motor (TP 8) 4.3 Hasil Perhitungan/Analisis Data 4.3.1 Analisis Jumlah Gerakan Tabel 4.8 Analisis Jumlah Gerakan Nilai Error Sudut 15º 10 1,30% menit 20 0,60% menit 30 0,30% menit Gambar 4.4 Output driver pada pwm 2 4.2 Hasil Pengukuran Pembanding 4.2.1 Pengukuran Sudut dengan 30º 1.17% 45º 2,09% 60º 2,8% 90º 2,1% 0,01% 0,85% 1,3% 1,4% 0,34% 0,57% 0,95% 0,89% Alat 4.3.2 Analisis Pengukuran Input Driver Motor Untuk pengambilan data pada pengukuran sudut diperoleh dari besarnya sudut modul ketika kondisi on dibandingkan dengan busur. Untuk rata-rata dari pengukuran arus yang masuk ke rangkaian driver motor adalah 3 mA dan rata-rata tegangan yang masuk ke rangkaian driver motor adalah 4,913 V. Tabel 4.6 Pengukuran Sudut Volt/div yaitu digunakan untuk mengatur batas pengukuran tegangan atau amplitodo dalam 1 kotak atau div pada batas posisi sisi atas dan sisi bawah kotak. Lebih tepatnya untuk menentukan besarnya tegangan yang dihitung dalam tiap kotak. Jadi berdasarkan gambar 4.1 dan gambar 4.2, besar tegangan dalam satu kotak adalah 2,00 V. Sudut Terapi 15º 30º 45º 60º 90º Pembacaan I II 16º 14º 30º 29º 44º 45º 59º 59º 90º 91º III 15º 31º 46º 60º 89º 4.2.2 Pengukuran Timer Untuk pengambilan data pada pengukuran timer diperoleh dari waktu yang dibutuhkan modul untuk melakukan setiap pemilihan gerakan yang dibandingkan dengan stopwatch. Tabel 4.7 Pengukuran Timer Set waktu (s) Pembacaan 1 2 3 4 5 600 1200 1800 601 1201 1802 601 1202 1802 601 1202 1802 601 1202 1802 601 1202 1802 Frekuensi adalah jumlah getaran yang terjadi dalam waktu satu detik atau banyaknya gelombang/getaran listrik yang dihasilkan tiap detik. Jadi berdasarkan gambar 4.1 dan gambar 4.2, dalam waktu 1 detik terdapat 976,5 gelombang. 4.3.3 Analisis Pengukuran Output Driver Motor Untuk rata-rata dari pengukuran arus yang keluar dari rangkaian driver motor adalah 288,4 mA dan rata-rata tegangan yang keluar dari rangkaian driver motor adalah 4,968 V untuk putar kanan dan -4,957 untuk putar kiri. Volt/div yaitu digunakan untuk mengatur batas pengukuran tegangan atau amplitodo dalam 1 kotak atau div pada batas posisi sisi atas dan sisi bawah kotak. Lebih tepatnya untuk menentukan besarnya tegangan yang dihitung dalam tiap kotak. Jadi berdasarkan gambar 4.3 dan gambar 4.4, besar tegangan dalam satu kotak adalah 5,00 V. Frekuensi adalah jumlah getaran yang terjadi dalam waktu satu detik atau banyaknya gelombang/getaran listrik yang dihasilkan tiap detik. Jadi berdasarkan gambar 4.3 dan gambar 4.4, dalam waktu 1 detik terdapat 976,5 gelombang. 4.3.4 Analisis Pengukuran Sudut Tabel 4.9 Analisis Pengukuran Sudut Sudut Terapi 15º 30º 45º 60º 90º Rata-rata Error 15 30 45 59,3 90 0% 0% 0% 1,67% 0% 4.3.5 Analisis Pengukuran Timer Tabel 4.10 Analisis Pengukuran Timer Setting Waktu 600 1200 1800 Rata-rata yaitu akan kembali ke posisi awal. Setelah itu input driver motor terhubung ke vcc 12 volt DC, 5 volt DC, ground dan ke PORTD 5 sebagai pwm 1 dan PORTD 6 sebagai pwm 2. Ketika pwm 1 disetting high maka pwm 2 harus disetting low dan ketika pwm 1 disetting low maka pwm 2 harus disetting high agar motor dapat berputar searah dan berbalik arah sesuai dengan settingan sudut. Keunggulan dari keseluruhan sistem a. Bisa menyesuaikan pada posisi tangan b. Pemilihan sudut yang diinginkan Kelemahan/Kekurangan Sistem a. Mekanik kurang terancang dengan baik. b. Motor yang kurang kuat jika diberi beban. c. Penentuan dan perancangan dalam penggunaan gir yang kurang diperhitungkan, sehinggan berpengaruh pada kecepatan putaran motor. Error PENUTUP 601 1201,8 1802 0,16% 0,15% 0,11% PEMBAHASAN Rangkaian minimum system menggunakan IC ATmega 328, dengan tegangan sebesar 5V DC dan ground. Input sensor dihubungkan pada port IC ATmega 328 untuk diolah yaitu di PORTC 5 dan di PORTD 2. LCD akan menampilkan settingan sudut dan timer. Jika settingan sudut dan timer sudah dilakukan maka motor akan bergerak sesuai dengan settingan. Dan ketika waktu settingan habis maka motor akan berhenti dan sensor akan bekerja sesuai program yang disetting Kesimpulan 6.1 Kesimpulan Berdasarakan hasil perencanaan, pembuatan modul, penulisan dan analisa data dapat disimpulkan sebagai berikut ini: 6.1.1 Beban tangan pasien berpengaruh pada arus dan tegangan yang dikeluarkan oleh driver motor. Semakin berat beban tangan pasien maka arus dan tegangan yang dikeluarkan semakin berkurang. 6.1.2 Di setiap settingan sudut terdapat nilai error. Dan rata-rata error di semua settingan adalah 0,3 % 6.1.3 Di setiap settingan timer terdapat nilai error. Dan rata-rata error di semua settingan adalah 0,16 % 6.2 6.2.1 6.2.2 Saran Menggunakan motor yang lebih kuat kapasitasnya agar ketika diberi beban, prinsip kerja tidak terganggu. Merancang mekanik dengan baik dan menggunakan bahan yang lebih ringan untuk mengantisipasi beban tangan pasien yang beratnya tidak sama. www.harduino/hessmer.org/blog/2013/12/28/ib t-2-h-bridge-wit DAFTAR PUSTAKA Baskara. 2013. LCD 2x16 http://baskarapunya.blogspot.co.id/2013 /01/liquid-crystal-display-lcd-16-x2.html Cailliet, R. 1991. Shoulder Paint. 3rd edition. Philadelphia: F.A. Davis Company. Eko Setyawan, 2015. Penatalaksanaan Fisioterapi Pada Lansia Dengan Frozen Shoulder Sinistra (kiri) Di Rumah Sakit Dr.moewardi. Surakarta; Universitas Muhammadiyah Surakarta. Robortus, 2007. Pengertian motor DC dan jenis motor DC. http://insauin.blogspot.co.id/2014/12/ma kalah-motor-dc.html Sandor, R. 2004. Adhesive capsulitis optimal treatment of frozen shoulder. Physician sportsmed. 28(9): 23-29. Sianturi, 2003. Studi Komparatif injeksi dan oral triamcinolone acetonide pada sindroma frozen sholuder. Semarang. Fadlan, 2012. Pulse Width Modulation. http://roboticelectric.blogspot.co.id/2012/11/pulsewidth-modulation-pwm.html Silvia, 2012. Frozen Shoulder. Kinex Medical, 20017. Clinical Guidelines for CPM following Rotator Cuff Repair: Synchronized or Isolated Protocol. www.kinexmedical.com Trinanda L, 2014. Konfigurasi Pin ATMega 328 Kinex Medical, 20017. Elbow CPM Following a Stable Intra-Articular Fracture. www.kinexmedical.com Kinex Medical, 20017. Post Surgical Shoulder CPM Following a Surgical Release, MUA or Contracture/Stiffness. www.kinexmedical.com Kisner, C dan A, Colby Lynn. 1996. Therapeutic Exercise Foundations and Tecniques. Edisi ke-5. USA: Davis Company. Lisa Nalurani, 2014. Perancangan Alat Terapi Pasca Stroke Menggunakan Infra Red Dan Pijatan Serta Shoulder Wheel. Surabaya; Politeknik Kesehatan Depkes Surabaya Pujar, 2013. Arduino Spesifikasi dan pengertian http://roboticbasics.blogspot.co.id/2016/ 01/spesifikasi-dan-pengertianmikrokontroler-arduino-uno.html Rainer Hessmer, 2015. H-Bridge IBT-2 Silviaphysio.wordpress.com/2012/10/21 /frozen-shoulder/ http://ymtry.blogspot.co.id/2014/atmega 328.html Wiratno, 1988. Sindrom Frozen Shoulder. http://medicastore.com/penyakit/3593/Si ndrom_Frozen_Shoulder.html