Bab 3 Teleskop Bamberg
advertisement

Bab 3
Teleskop Bamberg
3. 1
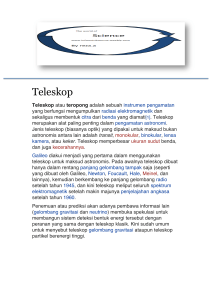
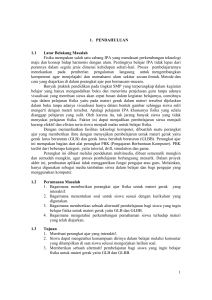
Teleskop Refraktor
Teleskop optik berfungsi mengumpulkan dan memfokuskan cahaya dari
bagian spektrum cahaya tampak elektromagnetik agar dapat langsung melihat
gambar yang diperbesar. Teleskop optik dapat meningkatkan ukuran angular dari
benda yang terletak pada jarak yang jauh, dan dapat pula meningkatkan kadar
kejelasan objek yang diamati. Jenis teleskop optik yang pertama kali ditemukan
yaitu teleskop refraktor.
Teleskop refraktor merupakan salah satu jenis dari teleskop optik yang
menggunakan susunan lensa untuk membentuk image. Cara kerjanya menyerupai
kaca pembesar, yaitu menggunakan lensa cembung untuk membelokkan arah
cahaya dan membawanya menuju titik fokus. Lensa cekung pada eyepice
memperbesar ukuran image yang terbentuk pada fokus, sehingga mempermudah
pengamatan objek. Kombinasi susunan dua lensa ini mengumpulkan cahaya
dengan intensitas yang lebih banyak dibandingkan dengan dapat dikumpulkan
oleh mata manusia.
Gambar 3. 1 Skema susunan teleskop refraktor
Kualitas image biasa dinilai berdasarkan nilai resolusi sudut (αR) yang
ditentukan dari diameter lensa cembung (D). Untuk cahaya tampak dengan
panjang gelombang 550 nm, diameter dinyatakan dalam milimeter, didapatkan
resolusi sudut dalam satuan arc sekon (1 arc sekon=1/60 arc menit=1/3600
17
derajat). Persamaan resolusi sudut berdasarkan kriteria Rayleigh yaitu sebagai
berikut:
α R = 1.22λ D
3. 2
(1)
Koordinat Astronomi
Terdapat bermacam-macam sistem koordinat Astronomi yang digunakan
untuk mendefinisikan lokasi suatu objek langit. Sistem koordinat yang digunakan
oleh teleskop Bamberg yaitu sistem koordinat ekuatorial.
3. 2. 1 Sistem Koordinat Ekuatorial
Sistem koordinat langit yang dipakai untuk teleskop bamberg adalah
sistem koordinat ekuatorial. Pada sistem ini sebuah titik di langit dinyatakan
dengan koordinat deklinasi (arah utara selatan) dan koordinat sudut jam (arah
timur barat). Gerak dalam arah utara-selatan disebut gerakan pointing, sedangkan
dalam arah timur-barat disebut gerakan tracking. Posisi bintang dinyatakan
dengan pasangan koordinat tersebut.
untuk menjelaskan lebih rinci mengenai sistem koordinat ekuatorial berikut ini
adalah gambar bola langit dengan sistem koordinat ekuatorial beserta dengan
penjelasannya.
Gambar 3.2 Bola langit dengan sistem koordinat ekuatorial
•
Lingkaran dasar: ekuator langit pengamat (bidang yang berwarna hijau pada
gambar 2.2) dan meridien pengamat. Ekuator langit ini adalah perluasan dari
18
ekuator bumi, atau dengan kata lain, ekuator langit sebidang dengan ekuator
bumi. Selanjutnya istilah ekuator merujuk pada ekuator langit.
•
Titik asal: titik aries (titik gamma, g) atau titik tanjak naik. Titik aries ini
adalah titik potong antara ekuator langit dengan ekliptika di bola langit, yaitu
titik tempat matahari bergerak dari belahan selatan ekuator menuju belahan
utara ekuator.
•
Kutub: kutub utara langit (KUL) dan kutub selatan langit (KSL). KUL dan
KSL masing-masing adalah proyeksi dari kutub utara dan kutub selatan
Bumi. Titik-titik KUL, KSL, utara, selatan, Z, dan N, semuanya terletak pada
sebuah lingkaran besar yang dinamakan meridien pengamat. Bola langit
berotasi dengan sumbu langit (garis hubung KUL-KSL) sebagai sumbu
putarnya. Satu periode putaran bola langit ini adalah 23 jam 56 menit 4 detik.
Interval ini mendefinisikan satu hari sideris.
•
Titik potong ekuator langit dengan horizon pengamat di bola langit,
mendefinisikan titik-titik timur dan barat.
•
Kemiringan bidang ekuator terhadap horizon menggambarkan letak lintang
pengamat di permukaan bumi. Jika pengamat berada di belahan Bumi selatan,
maka KSL berada di atas horizon, begitu juga sebaliknya. Sudut yang
dibentuk oleh KSL-C selatan (atau juga KUL-C selatan) adalah lintang
pengamat. Dengan kata lain, tinggi (altitude) kutub langit yang berada di atas
horizon adalah besar lintang pengamat. Jika yang di atas horizon itu KUL,
berarti pengamat di belahan Bumi utara, begitu pula sebaliknya. Sudut yang
dibentuk oleh ekuator dan horizon pengamat adalah 90 lintang derajat.
•
Koordinat:
o
Asensio rekta (Right Acension, RA): busur lingkaran besar pada ekuator
langit, dihitung dari titik aries ke arah timur menuju titik potong ekuator
dengan lingkaran langit, dihitung dari titik aries ke arah timur menuju titik
potong ekuator dengan lingkaran besar yang menghubungkan kutub-kutun
langit dengan objek. Jika dilihat dari KUL, RA biasanya dinyatakan dalam
satuan waktu (jam-menit-detik), sehingga misalkan busur lingkaran yang
dihitung dari titik aries tersebut adalah 23o, maka dikatakan RA = 1h 32m 0s.
(satu lingkaran penuh 360o = 24 jam)
19
o
Deklinasi, : busur lingkaran besar yang tegak lurus terhadap ekuator dan
melalui benda langit, diukur dari titik potong lingkaran besar tersebut dengan
ekuator, ke arah benda langit (di utara ekuator): d >0o, ke arah kutub selatan
langit (di selatan ekuator): d<0o.
o
Sudut jam (Hour Angle, HA): busur lingkaran besar yang dihitung dari
meridian pengamat sepanjang ekuator, menuju ke titik potong ekuator dengan
lingkaran besar yang melalui KUL-objek KSL. HA dihitung positif dari
meridian ke arah barat, dan negatif ke arah timur. HA seperti halnya RA,
biasa dinyatakan dalam satuan waktu (jam-menit-detik). (perhatikan: HAtitik
aries=HAobjek+RAobjek)
•
Untuk menyatakan posisi objek, bisa digunakan pasangan {RA, Dec} atau
pasangan {HA, Dec}. Pasangan {HA, Dec} dinamakan juga sebagai sistem
koordinat sideris lokal.
3. 3
Konstruksi Teleskop Bamberg
Konstruksi penyusun teleskop bamberg dapat terlihat melalui gambar-
gambar di bawah ini.
1
2
3
5
1
4
Gambar 3. 3. Konstruksi Teleskop
20
6
7
8
10
9
Gambar 3. 4 Mekanisme transmisi roda gigi gerak tracking
Keterangan:
1. Rangka (frame) penahan Teleskop
2. Sumbu putar gerak pointing
3. Mekanisme transmisi roda gigi gerak tracking (lebih jelas pada gambar 3.4)
4. Beton penyangga konstruksi teleskop sejajar terhadap sumbu putar gerak
tracking
5. Teleskop refraktor Bamberg
6. Roda gigi Cacing
7. Part penghubung roda gigi cacing dan frame penahan teleskop
8. Beban penyeimbang gaya-gaya
9. Poros Coupled-decoupled
10. Poros sistem transmisi dari roda gigi
3. 4
Perangkat Gerak Saat Ini
Dalam pengoperasian teleskop Bamberg dibutuhkan gerakan dengan dua
derajat kebebasan. Gerakan pertama, gerakan pointing atau gerak dalam arah
deklinasi, yaitu gerak rotasi teleskop terhadap sumbu z yang dibutuhkan untuk
mendapatkan objek pengamatan dalam rentang pandangan lensa teleskop dari
posisi istirahatnya. Gerak pointing atau pemosisian teleskop dilakukan pada awal
dan akhir pengamatan. Selama ini gerakan pointing dilakukan secara manual
dengan menarik posisi ujung eyepiece teleskop ke posisi objek ukur. Posisi sudut
teleskop diketahui dari skala seperti yang terlihat pada gambar 4.1.a. Setelah skala
menunjukkan angka yang diinginkan, pemosisian teleskop dilanjutkan dengan
memutar kenop yang ditandai, seperti ditunjukkan oleh gambar 4.1.c. kenop
21
diputar sedikit demi sedikit sampai objek yang ingin diamati tampak pada lensa
teleskop.
(a)
y
x
z
(b)
(c)
Gambar 3.5 (a) skala petunjuk posisi pointing pada sumbu putar teleskop
(b) posisi istirahat teleskop (c) kenop pengatur posisi
Gerak tracking atau gerak dalam arah sudut jam bertujuan mengikuti
gerakan relatif objek pengamatan terhadap bumi yang disebabkan oleh adanya
gerakan rotasi bumi dan rotasi bulan. Pada setting awal, posisi sudut jam atau
gerakan tracking dilakukan secara manual dengan mendorong konstruksi ke posisi
koordinat yang diinginkan mengikuti skala seperti yang terlihat pada gambar 3.6.
Setelah mendapatkan objek pengamatan gerak dalam arah tracking dikunci dan
dihubungkan dengan sistem transmisi yang akan dibahas pada bagian selanjutnya.
Gerak tracking dilaksanakan dengan menggunakan rangkaian transmisi yang
panjang berasal dari beban seberat 165 kg seperti yang terlihat pada gambar 3.7.
22
Gambar 3.6 Skala dalam arah gerak sudut jam (gerak tracking)
Gambar 3.7 Beban yang mengendalikan perangkat Tracking [6]
Proses pencarian objek pengamatan melibatkan gerak dalam dua derajat
kebebasan, yaitu arah deklinasi dan arah sudut jam. Setelah berada pada posisi
pengamatan yang tepat, konstruksi dan sistem transmisi gerak tracking dikopling.
Sehingga teleskop bersama-sama dengan konstruksi penyangganya bergerak
dalam arah sudut jam atau berputar terhadap sumbu x pada kecepatan yang
konstan.
III. 4. 1 Perangkat Gerak Pointing
Selama ini gerak pointing dilaksanakan secara manual dengan menggeser
teleskop menggunakan tangan. Pemosisian teleskop dalam step-step kecil dalam
arah deklinasi menggunakan kenop yang terhubung ke roda gigi kecil bevel.
III. 4. 2 Perangkat Gerak Tracking
Gerak tracking merupakan gerak rotasi konstruksi bersama-sama dengan
teleskop terhadap sumbu x (mengikuti sumbu x-y-z pada gambar 3.5 (b)). Gerak
ini dilakukan dengan menggunakan beban seperti yang terlihat pada gambar 3.7.
23
Beban dinaikkan dengan menggunakan motor AC, selanjutnya beban tersebut
turun dengan kecepatan rendah yang konstan. Beban tersebut langsung terhubung
ke roller chain yang menggerakkan gearbox. kemudian melalui poros, gearbox
menggerakkan rangkaian roda gigi yang terdapat pada mekanisme gerak tracking
seperti ditunjukkan oleh gambar 3.4. Dalam melaksanakan gerak tracking ini,
torsi yang dihasilkan akibat gaya gravitasi pada berat beban sebesar 165 kg pada
akhirnya menyebabkan putaran kecepatan putar yang sangat kecil pada poros
konstruksi, yaitu 0,250/menit. Perangkat gerak tracking menggunakan serangkaian
roda gigi cacing, helical, dan bevel.
(a)
(b)
Beban 165
k
Roda
gigi
Transmisi
melalui
roller chain
(c)
gearbo
Roda
gigi lurus
dan
Gerak dalam
arah sudut
(d)
Gambar 3.8 Rangkaian transmisi penggerak tracking
24