Pemanfaatan Energi Kinetik Menjadi Energi Listrik Menggunakan
advertisement

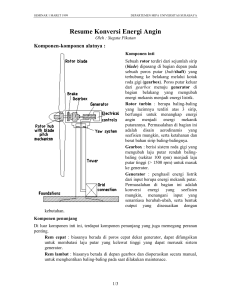
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi sistem yang dibuat. Gambar 3.1 menunjukkan blok diagram sistem secara keseluruhan. Anak Tangga I Anak Tangga II Anak Tangga III Gambar 3.1. Blok Diagram Sistem Secara Keseluruhan. 10 3.1. Mekanik Bagian mekanik pada anak tangga terbagi menjadi 2, yang pertama adalah anak tangga yang menonjol karena adanya pegas sehingga terbentuk energi potensial yang kemudian berubah menjadi energi kinetik pada tuas yang terhubung pada gir flywheel. Bagian kedua dari mekanik adalah gearbox yang menguatkan energi kinetik dari tuas dan kemudian memutar generator. Alat yang terealisasi terdiri dari 4 buah anak tangga yang terdiri dari 1 anak tangga statis tempat rangkaian elektrik dan 3 buah anak tangga dinamis berpegas. Dari ketiga anak tangga dinamis berpegas, terdapat 2 anak tangga yang saling terhubung dengan 1 buah generator dan 1 anak tangga yang memiliki generator sendiri. Dilengkapi dengan tiang lampu setinggi 2 meter. Dimensi keseluruhan anak tangga adalah panjang 50 cm, lebar 100 cm, dan tinggi 72 cm. Anak tangga yang terealisasi ditunjukkan melalui Gambar 3.2. Gambar 3.2. Realisasi Keseluruhan Alat 3.1.1 Pegas Pegas berada pada 4 sudut anak tangga seperti yang ditunjukkan pada Gambar 3.3. Pegas inilah yang akan memberi perbedaan ketinggian yang menghasilkan energi 11 potensial. Ketika anak tangga dipijak, tuas akan memutar gir flywheel seperti ditunjukkan pada Gambar 3.4. Energi potensial yang dihasilkan saat anak tangga dipijak dengan massa 48 kg menurut Persamaan 2.1 adalah Gambar 3.3. Pegas Pada Sudut Anak Tangga Gambar 3.4. Tuas Penggerak Flywheel Gaya gravitasi akan menggerakkan tuas penggerak gir flywheel. Gerakan inilah yang menghasilkan energi kinetik akibat rotasi benda tegar. Untuk mengetahui berapa besarnya energi kinetik yang dihasilkan digunakan Persamaan 2.5. Besarnya energi potensial dari perubahan ketinggian pegas akan sama dengan besarnya energi kinetik pada flywheel. Diketahui berat dari gir flywheel adalah 138,6 gram dan diameter 5,4 cm. ......................................................... (3.1) 12 .................................................. (3.2) ....................................................... (3.3) ⁄ Apabila 1 rpm = 0,1047 radian / detik, maka diketahui 3.1.2 Gearbox Terdiri atas sepasang gir, gir yang porosnya terhubung dengan gir flywheel adalah gir besar bergigi 60. Kemudian gir tersebut menggerakkan gir kecil bergigi 16 yang porosnya merupakan rotor generator. Realisasi susunan gearbox ditunjukkan oleh Gambar 3.5. Gambar 3.5. Realisasi Gearbox Gearbox disusun seperti ini agar dengan putaran awal sedikit mampu memberikan putaran akhir lebih banyak. Percepatan yang timbul akan memutar rotor generator lebih cepat dan putarannya juga lebih banyak. Dengan Persamaan 2.6 dan 13 jumlah gigi gir yang digunakan, yaitu gir besar bergigi 60 dan gir kecil bergigi 16 dapat diketahui rasio gearbox. Variabel R merupakan jari-jari cakram, yaitu 2,7 cm. Sedangkan S merupakan jarak tempuh tuas akibat pijakan pada anak tangga dimana terukur 7 cm. Dengan Persamaan 2.2 maka akan diperoleh Bila satu pijakan untuk menghasilkan nilai S membutuhkan waktu 0,5 detik, maka kecepatan sudut rata-rata dengan menggunakan Persamaan 2.3 adalah Dengan demikian kecepatan akhir gearbox adalah .................................................. (3.4) ⁄ Dengan menggunakan Persamaan 2.5, energi kinetik dari gearbox adalah ( ) ( ................................................. (3.5) ) 14 Setelah diketahui besarnya energi potensial dan kinetik yang didapat dari mekanik anak tangga, maka efisiensi mekanik adalah ............................................................. (3.6) Hasil perhitungan menunjukkan bahwa efisiensi mekanik yang dirancang adalah 85%. 3.2. Generator Generator yang diaplikasikan adalah generator yang didapat dari blok silinder mesin sepeda motor Suzuki RC 100. Kedua buah generator dibuat memiliki hasil tegangan keluaran yang berbeda. Generator yang pertama lebih ringan sehingga putaran yang dihasilkan pada sekali pijakan lebih banyak daripada generator kedua yang lebih berat putarannya. Rotor dari generator ada kumparan sedangkan bagian statisnya adalah magnet. Gambar 3.6. Realisasi Generator 15 Gambar 3.7. Realisasi Multi Generator Untuk mendapatkan besarnya keluaran yang dihasilkan oleh generator, dilakukan pengujian tanpa beban. Pengujian dengan cara mengukur tegangan AC yang dihasilkan generator saat anak tangga dipijak menggunakan multimeter FLUKE 26 III. Tabel 3.1. Hasil Pengujian Generator I dan II Tanpa Beban Pengujian ke1 2 3 4 5 6 7 8 9 10 Rata-rata Generator I Generator II Tegangan (VAC) Tegangan (VAC) 5,1 4,4 5,3 4,5 5,0 4,6 4,8 4,8 5,5 4,5 5,3 4,5 5,0 5,3 5,2 4,6 5,3 4,7 5,4 4,3 5,2 4,6 3.3. Konverter Modul konverter akan mengolah hasil keluaran dari generator untuk kemudian digabungkan lalu disimpan pada akumulator. Ada 2 bagian konversi dalam modul ini, yang pertama konversi dari tegangan AC menjadi DC dan konversi tegangan DC menjadi DC. 16 3.3.1. Konverter AC - DC Rangkaian ini untuk mengubah keluaran generator yang berupa tegangan AC menjadi tegangan DC. Komponen utama dalam rangkaian ini adalah dioda schottky yang disusun menjadi penyearah gelombang penuh sistem jembatan. Dioda 1N5401 digunakan dengan tegangan buka maksimal (Vf) 1,2 volt [6]. Rangkaian konverter ACDC ditunjukkan oleh Gambar 2.2. Dengan menggunakan Persamaan 2.12 dan hasil perhitungan pada Tabel 3.1 maka tegangan DC yang dihasilkan adalah ( ( )) 3.3.2. Konverter DC – DC 3.3.2.1. Konverter Penaik Tegangan Konverter penaik tegangan (boost converter) digunakan untuk menaikkan tegangan keluaran generator yang masih dibawah tegangan yang diperlukan untuk mengisi akumulator. Dalam perancangan ini digunakan IC LM2577-Adj[5]. Rangkaian penaik tegangan yang telah dibuat ditunjukkan oleh Gambar 3.8 berikut. Untuk menentukan besarnya nilai komponen yang digunakan, menggunakan pedoman rumus yang ada di datasheet pada Lampiran 1. Gambar 3.8. Rangkaian Penaik Tegangan.[5] 17 Arus maksimum keluaran IC ini dapat dihitung dengan Persamaan 2.9 ( ) ( ) Nilai maksimum duty cycle dapat dihitung dengan Persamaan 2.10. ( ) ( ) Nilai minimum induktor untuk kestabilan regulasi dihitung dengan Persamaan 2.11 ( Kemudian mencari nilai ) melalui Persamaan 2.12 Dengan melihat grafik pada Gambar 2.4 maka didapatkan nilai induktor adalah 68 uH. Nilai Rc dan Cc yang terhubung dengan pin 1, dapat dihitung dengan Persamaan 2.13 dan 2.14 sebagai berikut Resistor yang digunakan adalah 5.600 Ω, dengan menggunakan Persamaan 2.14 18 Nilai Cout berdasarkan Persamaan 2.15 dan 2.16 berikut dan ( ( )) ( ( )) Menurut datasheet nilai kapasitor minimum yang diambil adalah yang paling besar yaitu 794 µF. Tegangan keluaran dari IC ini dapat dihitung dengan Persamaan 2.17 berikut ( ) 3.4. Penyimpanan Energi Energi listrik yang telah disearahkan dan nilai tegangannya sesuai akan disimpan ke akumulator. Akumulator yang di gunakan merupakan akumulator (aki) kering 12V 5Ah seperti ditunjukkan oleh Gambar 3.10. Untuk mencegah adanya tegangan balik dari akumulator yang menuju ke modul konverter, digunakan dioda yang dipasang seri dengan akumulator. Dengan aki 12V 5Ah maka energi total aki ketika penuh adalah. ....................................................... (3.7) 19 Gambar 3.9. Akumulator Kering 3.5. Penerangan Sebagai penerangan digunakan lampu LED 12VDC 3W seperti yang ditunjukkan oleh Gambar 3.11. Diasumsikan akumulator dalam kondisi penuh, maka lamanya lampu menyala dapat dihitung sebagai berikut ............................................. (3.8) Gambar 3.10. Lampu LED 3 Watt 20