BAB II LANDASAN TEORI 2.1 Sistem
advertisement

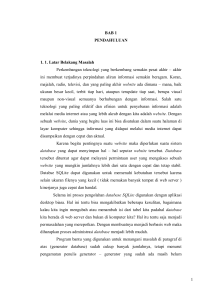
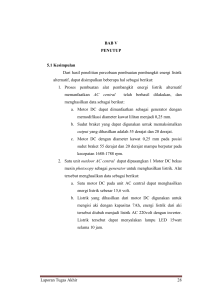
BAB II LANDASAN TEORI 2.1 Sistem Pembangkitan 2.1.1 Sistem Pembangkitan Tenaga Listrik Sistem Pembangkit Tenaga Listrik adalah gabungan yang terdiri dari komponen-komponen maupun media penggerak mula seperti: air, turbin, generator, alat bantu lain dan transformator pembangkit yang merupakan satu kesatuan atau suatu system. (Asmono, 2010). Pembangkit Tenaga listrik yang banyak dilakukan dengan cara memutar generator sinkron sehingga didapatkan tenaga listrik arus bolak – balik tiga fasa. Tenaga Mekanik yang dipakai memutar generator listrik didapat dari mesin penggerak generator listrik atau biasa disebut penggerak mula (primover). Mesin penggerak generator listrik yang banyak digunakan adalah mesin diesel, turbin uap, dan turbin gas. Mesin penggerak generator melakukan konversi tenaga primer menjadi tenaga mekanik penggerak generator. Proses konversi tenaga primer menjadi tenaga mekanik menimbulkan produk sampingan berupa limbah dan kebisingan yang perlu dikendalikan agar tidak menimbulkan masalah lingkungan. Dari segi ekonomi teknik, komponen biaya penyediaan tenaga listrik terbesar adalah biaya pembangkitan, khususnya biaya bahan bakar. Oleh sebab itu, berbagai teknik untuk menekan biaya bahan bakar terus berkembang, baik dari segi unit pembngkit secara individu maupun dari segi operasi sistem tenaga listrik secra terpadu. Proses pembangkitan tenaga listrik adalah proses konversi tenaga primer (bahan bakar atau potensi tenaga air) menjadi tenaga mekanik sebagai penggerak generator listrik dan selanjutnya generator listrik menghasilkan tenaga listrik. Gambar dibawah menunjukkan diagram proses pembangkitan tenaga listrik, mulai dari tenaga primer sampai dengan konsumen : (a) Pusat 5 6 Listrik Tenaga Air (PLTA); (b) Pusat Listrik Tenaga Panas (PLTP); dan (c) Pusat listrik Tenaga Nuklir (PLTN). Gambar 2.1 Diagram proses pembangkitan Tenaga listrik Pembangkit energi listrik yang banyak dilakukan dengan cara memutar generator sinkron sehingga didapat tenaga listrik arus bolak – balik tiga phasa. Energi mekanik yang dipakai memutar generator listrik didapat dari mesin penggerak. 2.1.2 Kelengkapan pada pusat pembangkit tenaga listrik Kelengkapan pada pusat pembangkit listrik antara lain adalah : 1. Instalasi sumber energi (energi primer, yaitu instalasi bahan bakar untuk pusat pembangkit termal dan atau instalasi tenaga air). 2. Instalasi mesin penggerak generator listrik, yaitu instalasi yang berfungsi sebagai pengubah energi primer menjadi energi mekanik sebagai penggerak generator listrik. 7 3. Mesin penggerak generator listrik dapat berasal dari ketel uap beserta turbin uap, mesin diesel, turbin gas, dan turbin air. 4. Instalasi pendingin, yaitu instalasi yang berfungsi mendinginkan instalasi mesin penggerak yang menggunakan bahan bakar. 5. Instalasi listrik, yaitu instalasi yang secara garis besar terdiri dari: 1. Instalasi tegangan tinggi, yaitu instalasi yang digunakan untuk menyalurkan energi listrik yang dibangkitkan generator listrik. 2. Instalasi tegangan rendah, yaitu instalasi pada peralatan bantu dan instalasi penerangan. 3. Instalasi arus searah, yaitu instalasi baterai aki dan peralatan pengisiannya serta jaringan arus searah terutama yang digunakan untuk proteksi, kontrol, dan telekomunikasi. 2.1.3 Spesifikasi PLTA berdasarkan luas dan daya yang dibangkitkan Meskipun tidak ada spesifikasi resmi untuk rentan kapasitas daya yang dibangkitkan, namun pembangkit listrik tenaga air yang membangkitkan lebih dari 10 GW dianggap fasilitas listrik tenaga air besar. Saat ini, hanya 3 pembangkit yang memproduksi lebih dari 10 GW (10.000 MW) yang beroperasi diseluruh dunia, Three Gorges Dam sebesar 22,5 GW, Bendungan Itaipun 14 GW, dan Bendungan Guri 10,2 GW. PLTA skala besar lebih sering dilihat di dunia, dengan beberapa fasilitas, pembangkit listrik tenaga air mampu menghasilkan lebih dari dua kali lipat lebih besar dari kapasitas terpasang di pembangkit tenaga nuklir saat ini. Berikut adalah perkiraan klasifikasi PLTA berdasarkan Energi Listrik yang dibangkitkan. 1. Smallhydro Pembangkit listrik kecil atau smallhydro adalah pembangkit listrik tenaga air pada skala melayani komunitas kecil atu industri. Definisi dari proyek smallhydro bervariasi, namun kapasitas pmbangkitan mencapai diatas 10 MW yang secara umum dapat diterima sebagi smallhydro. 8 2. Mikrohydro Mikrohydro di Vietnam adalah istilah yang digunakan untuk instalasi listrik tenaga air yang biasanya memproduksi hingga 100kW. 3. Pikohydro Pikohydro adalah istilah yang digunakan untuk listrik tenaga air dibawah 5 kW. Hal ini berguna bagi masyarakat terpencil yang membutuhkan hanya sejumlah kecil listrik. Misalnya, untuk satu atau dua lampu neon dan TV atau radio untuk beberapa rumah. 2.1.4 Pembangkit listrik Tenaga Mikrohydro Mikrohydro atau yang dimaksud dengan Pembangkit Listrik Tenaga Mikrohidro (PLTMH), adalah suatu pembangkit listrik skala kecil yang menggunakan tenaga air sebagai tenaga penggeraknya seperti, saluran irigasi, sungai atau air terjun alam dengan cara memanfaatkan tinggi terjunan (head) dan jumlah debit air. Secara teknis, Mikrohidro memiliki tiga komponen utama dalam pemuatan PLTMH yaitu air (sebagai sumber energi), turbin, dan generator. Air yang mengalir dengan kapasitas tertentu disalurkan dengan ketinggian tetentu menju rumah instalasi (rumah turbin). Pada rumah tersebut (power house) instalasi air tersebut akan menumbuk turbin, dipastikan turbin akan menerima langsung energi dari air dan mengubahnya menjadi energi mekanik yang menyebabkan berputarnya poros turbin. Poros tersebut kemudian ditransmisikan ke generator dengan menggunakan kopling. Kemudian dari generator akan dihasilkan energi listrik yang akan masuk ke sistem kontrol arus listrik sebelum dialirkan pada rumah–rumah masyarakat sekitar ataupun untuk keperluan lainnya. Ini merupakan seikit ulasan ringkas mengenai mikrohidro dengan merubah energi aliran dan ketinggian air menjadi energi listrik. 9 Gambar 2.2 PLTMH Kalimaron, Seloliman, Mojokerto, Jawa Timur. Beberapa keuntungan yang terdapat pada pembangkit listrik tenaga listrik mikrohidro adalah sebagai berikut : 1. Dibandingkan dengan pembangkit listrik jenis yang lain, PLTMH ini cukup murah karena menggunakan energi alam. 2. Memiliki konstruksi yang sederhana dan dapat dioperasikan di daerah terpencil dengan tenaga terampil penduduk daerah setempat dengan sedikit latihan. 3. Tidak menimbulkan pencemaran. 4. Dapat dipadukan dengan program lainnya seperti irigasi dan perikanan. 5. Dapat mendorong masyarakat agar dapat menjaga kelestarian hutan sehingga ketersediaan air terjamin. 2.2 Motor Induksi Tiga Fasa Secara umum motor listrik adalah suatu alat yang dapat merubah energi listrik menjadi energi mekanik yang berupa tenaga putar dan motor ini bekerja berdasarkan prinsip elektromagnetik. Motor induksi merupakan motor arus bolak-balik (AC) yang paling banyak digunakan. Penamaannya berasal dari kenyataan bahwa arus motor ini bukan diperoleh dari sumber tertentu, melainkan arus yang terinduksi akibat perbedaan relatif antara putaran rotor dengan medan putar yang dihasilkan arus rotor. 10 Belitan stator yang dihubungkan dengan suatu sumber tenaga tiga fasa akan menghasilkan medan magnet yang berputar dengan kecepatan sinkron. Medan putar stator tersebut akan memotong konduktor-konduktor pada rotor, sehingga terinduksi arus, rotor pun akan berputar mengikuti medan putar stator. 2.2.1 Konstruksi Motor induksi tiga fasa terdiri dari dua bagian utama yaitu bagian yang (stator) dan bagian yang bergerak (rotor). Untuk berbagai motor induksi diam tiga fasa konstruksi statornya sama, beda halnya dengan rotor. Rotor motor induksi tiga fasa secara garis besar terbagi dua jenis yaitu rotor sangkar dan rotor belitan. Diantaranya rotor dan stator terdapat celah udara yang merupakan ruang tempat lewat fluks stator sehingga menyebabkan rotor berputar. Celah udara terdapat antara stator dan rotor yang diatur sedemikian rupa sehingga didapatkan hasil kerja motor yang optimum, bila celah udara antara stator dan rotor terlalu besar akan mengakibatkan efisiensi motor induksi menjadi rendah. Gambar 2.3 fisik motor induksi 3 fasa Rangka stator motor induksi didesain dengan 4 tujuan yang jelas yaitu : 1. Menutupi inti dan kumparan. 2. Melindungi bagian mesin yang bergerak dari kontak langsung dengan manusia dan dari goresan yang disebabkan gangguan objek serta udara terbuka. 11 3. Menyalurkan torsi kebagian peralatan pendukung mesin dan oleh karena itu stator didesain untuk tahan terhadap gaya putar dan goncangan. 4. Berguna sebagai sarana rumahan ventilasi udara motor, sehingga pendinginan motor lebih efektif. Bagian-bagian utama motor diantaranya terdiri dari : 1. Stator Stator adalah bagian yang diam (stationary) dengan kumparan yang menghasilkan tegangan dan dihubungkan ke jaringan luar. Sebagimana ciri khas semua perlengkapan listrik, stator generator terdiri dari baja yang berfungsi melindungi bagian dalam generator, kotak terminal ataupun name plate generator dan inti stator yang terbuat dari bahan ferromagnetic yang berlapis-lapis dan terdapat alur-alur tempat meletakkan lilit stator. Lilitan stator yang merupakan tempat untuk menghasilkan tegangan. Inti stator dibuat berlapis-lapis untuk memperkecil rugi arus eddy (eddy current). Dengan bahan yang mempunyai kualitas listrik yang baik maka permeabilitas dan resistivitas bahan tinggi. Konstruksi stator motor induksi terdiri dari bagian-bagian sebagai berikut : 1. Rumah stator dari besi tulang. 2. Stator dari besi lunak atau baja silikon. 3. Alur dan gigi, bahannya sama dengan inti stator dimana alur ini merupakan tempat meletakkan belitan stator. 4. Belitan stator dari tembaga. 5. Bantalan poros. Gambar 2.4 Stator 12 2. Rotor Rotor adalah bagian yang digerakan secara mekanis dan berputar pada kecepatan tetap (konstan). Arus searah pada kumparan medan yang terletak pada ini merupakan sumber utama dari fluksi. Ada dua jenis yang digunakan pada rotor generator yaitu jenis kutub sepatu (salient pole) dan jenis silinder (cylindrical type). Rotor jenis sepatu digunakan untuk generator dengan kecepatan rendah dan medium, diameter rotor besar dan rotornya rendah. Sedangkan rotor jenis silinder digunakan untuk generator kecepatan tinggi, biasanya dua atau empat kutub, diameter rotornya kecil dan rotornya panjang. Kelebihan dari rotor jenis silinder adalah keseimbangan yang lebih baik, operasinya lembut (tidak bising). Konstruksi rotor motor induksi terdiri dari bagian-bagian sebagai berikut : 1. Inti rotor, bahannya sama dengan inti stator. 2. Alur dan gigi, bahannya sama dengan ini, alur merupakan tempat meletakkan belitan atau kumparan rotor. 3. Belitan rotor, bahannya dari tembaga. 4. Poros atau as. Gambar 2.5 rotor silinder 2.2.2 Kecepatan Putar Generator Sinkron Frekuensi elektris yang dihasilkan generator sinkron adalah sinkron dengan kecepatan putar generator. Rotor generator sinkron terdiri dari rangkaian electromagnet dengan suplai arus DC. Medan magnet rotor bergerak pada arah putar rotor. Hubungan antara kecepatan putar medan magnet pada mesin dengan frekuensi elektrik pada stator adalah : 13 fe = 𝑛𝑟 .𝑝 120 ......................................................................... (2.1) Dimana : fe = frekuensi listrik (Hz) nr = kecepatan putar rotor = kecepatan medan magnet (rpm) p = jumlah kutub Jika poros generator diputar dengan kecepatan sinkron dan rotor diberi arus medan If, maka tegangan E0 akan terinduksi pada kumparan jangkar stator sebesar : Eg = 4,44. Kd. Kp. Øg. f. n .......................................... (2.2) Dimana : Eg = GGl yang dibangkitkan Kd = Faktor distribusi Kp = Faktor pitch Ø = fluks yang dihasilkan oleh If (arus penguatan) 2.2.3 Prinsip Kerja Motor Induksi Prinsip kerja motor induksi adalah berdasarkan induksi elektromagnetik, yakni bila kumparan stator diberi sumber tegangan bolak-balik tiga fasa maka arus akan mengalir pada kumparan tersebut, sehingga menimbulkan medan putar (garis-garis gaya fluksi) yang berputar dengan kecepatan sinkron. Garis-garis gaya fluksi (medan putar) dari stator tersebut yang berputar akan memotong konduktor-konduktor pada rotor sehingga timbul EMF (elektro motive force) atau GGL (gaya gerak listrik) atau tegangan induksi. Berhubung kumparan motor merupakan rangkaian tertutup maka pada kumparan tersebut mengalir arus. Arus yang mengalir pada konduktor rotor yang berada pada medan magnet berputar dari stator, maka pada penghantar rotor tersebut timbul gayagaya yang berpasangan dan berlawanan arah, dimana gaya-gaya tersebut berusaha menggerakannya dalam arah tegak lurus terhadap medan. 14 Perputaran motor pada arus bolak-balik ditimbulkan karena adanya medan putar (fluksi yang berputar) yang dihasilkan dalam kumparan statornya. Syarat syarat terjadinya medan putar adalah : 1. Stator dihubungkan dengan sumber daya tiga fasa. 2. Kumparan-kumparan stator harus digeser simetris. 3. Tegangan sumber mempunyai beda fasa. 2.2.4 Motor Induksi Sebagai Generator Motor induksi tiga fasa merupakan motor yang banyak digunakan. Salah satunya motor induksi rotor sangkar (asinkron) yang banyak digunakan karena kelebihannya sangat kokoh, sederhana, murah, dan mudah perawatannya. Motor induksi tiga fasa dapat dioperasikan sebagai generator dengan cara memutar rotor pada kecepatan diatas kecepatan medan putar. Motor listrik tiga fasa dapat dioperasikan sebagai generator satu fasa maupun tiga fasa. Pada motor induksi yang dioperasikan sebagai generator tidak terdapat pengatur tegangan. Pada motor induksi sebagai generator tegangan keluarannya sangat dipengaruhi oleh besarnya beban dan nilai kapasitor eksitasi. Pada umumnya pengendalian tegangan generator induksi menggunakan Induction Generator Controller (IGC). IGC merupakan piranti elektronis yang menyensor tegangan, kemudian mengatur besar beban penyeimbang. IGC berbasis komputer dan berbasis komparator. Agar motor induksi dapat berfungsi sebagai generator maka diperlukan arus eksitasi, arus eksitasi tersebut didapat dari kapasitor. Salah satu cara untuk mengendalikan tegangan dan frekuensi pada generator ini adalah dengan cara mengatur beban pada (output) genertor. Apabila beban nyata berkurang maka ada mekanisme yang mengatur beban penyeimbang (ballast load) agar terjadi keseimbangan antara masukan dan keluaran. 15 2.2.5 Hubungan Bintang (Y) Hubungan bintang akan mengurangi arus line dan torsi starting sekitar 3 kali dibandingkan dengan hubungan segitiga. Pada hubungan bintang ini arus fasa dengan arus pada jala-jala. Sekema umum dapat dilihat pada gbr dibawah. sama Gambar 2.6 hubungan bintang Pada hubungan bintang berlaku persamaan : VL = √3 Vp ........................................................................... (2.3) IP = IL .................................................................................... (2.4) Keterangan : VL = Tegangan fasa-fasa VP = Tegangan fasa IP = Arus fasa IL = Arus fasa-fasa Tegangan fasa-fasa adalah 3 kali tegangan fasa (√3 = 1,73). Pada sebuah beban seimbang, rumus umum untuk daya tiga fasa menjadi : P = 3 V I cos φ...............................................................(2.5) Dimana nilai V dan I adalah fasa-fasa. 2.2.6 Hubungan Segitiga (∆) Hubungan segitiga tegangan fasa-fasa sama dengan tegangan fasa. Untuk sekema umumnya dapat dilihat pada gambar dibawah ini : 16 Gambar 2.7 hubungan segitiga Pada hubungan segitiga berlaku persamaan : IL = √3 IP ................................................................. (2.6) VL = VP ....................................................................(2.7) Arus fasa-fasa adalah 3 kali araus fasa. Seperti rumus umum sebelumnya untuk rumus daya tiga bisa dilihat pada persamaan (2.5) 2.3 Sistem Sinkronisasi 1 fasa Operasi paralel pusat-pusat tenaga listrik pada dasarnya adalah bekerjanya paralel satu generator dengan generator lain, dengan tambahan resistansi dan reaktansi saluran-saluran interkoneksi. Proses menghubungkan paralel satu generator dengan generator lainnya dinamakan sinkronisasi, atau dapat juga dikatakan bahwa Sinkronisasi pada generator adalah memparalelkan kerja dua buah generator atau lebih untuk mendapatkan daya sebesar jumlah generator tersebut dengan syarat syarat yang telah ditentukan. Adapun syarat-syarat proses Sinkronisasi generator 1 fasa adalah sebagai berikut : 1. Mempunyai tegangan yang sama. 2. Mempunyai frekuensi yang sama. 2.3.1 Mempunyai tegangan kerja sama Dengan adanya tegangan kerja yang sama diharapkan pada saat diparalel dengan beban kosong faktor dayanya 1. Dengan faktor daya 1 berarti tegangan antara 2 generator persisi sama. Jika 2 sumber tegangan itu berasal dari dua 17 sumber yang sifatnya statis misal dari battery atau transformator maka tidak akan ada arus antara kedunya. Namun karena dua sumber merupakan sumber tegangan yang dinamis (generator) Maka faktor dayanya akan terjadi deviasi naik dan turun periodik bergantian dan berlawanan. Hal ini terjadi karena adanya sedikit secara perbedaan sudut phasa yang sesekali bergeser karena faktor gerak dinamis dari penggerak. Itu bisa dibuktikan dengan membaca secara bersamaan Rpm dari misal dua Generator dalam keadaan sinkron Generator 1 mempunyai kecepatan putar 1500 dan generator 2 mempunyai kecepatan putar 1501 maka terdapat 1 putaran / menit dengan perhitungan 1/1500 x 360 derajat maka terdapat selisih beda fase 0,24 derajat dan jika dihitung selisih teganan sebesar cos phi 0,24 derajat x tegangan nominal (220V) tegangan nominal (220V) dan selisihnya sekitar 52.8V dan selisih tegangan yang kecil cukup mengakibatkan timbulnya arus sirkulasi antara 2 buah generator tersebut dan sifatnya tarik menarik dan itu tidak membahayakan. Pada saat dibebani bersama sama maka faktor dayanya akan relatif sama sesuai dengan faktor daya beban. Memang sebaiknya dan idealnya masing masing generator menunjukkan faktor daya yang sama. Namun jika terjadi faktor daya yang berbeda dengan selisih tidak terlalu banyak tidak terjadi akibat apa-apa. Akibatnya salah satu generator yang mempunyai nilai daya. Faktor rendah akan mempunyai nilai arus yang sedikit lebih tinggi. Yang penting diperhatikan adalah tidak melebihi arus nominal dan daya nominal dari generator. Pada generator yang akan diparalel biasanya didalam alternatornya ditambahkan peralatan yang dinamakan Droop kit . Droop kit ini berupa current transformer yang dipasang disebagian lilitan dan outputnya disambungkan ke AVR. Droop kit ini berfungsi untuk mengatur faktor daya berdasarkan besarnya arus beban, sehingga pembagian beban KVAR diharapkan sama pada KW yang sama. 2.3.2 Mempunyai frekuensi sama Didalam dunia industri dikenal 2 buah sistem frekuensi yaitu 50 Hz dan 60 Hz Dalam operasionalnya sebuah generator bisa saja mempunyai frekuensi yang 18 fluktuatif (berubah-ubah) karena faktor-faktor tertentu. Pada jaringan distribusi dipasang alat pembatas frekuensi yang membatasi frekuensi pada minimal 48,5 hz dan maksimal 51,5 Hz. Namun pada generator pabrik over frekuensi dibatasi sampai 55 Hz sebagai overspeed. Pada saat hendak paralel, dua buah generator tentu tidak mempunyai frekuensi yang sama persis. Jika mempunyai frekuensi yang sama persis maka generator tidak akan bisa paralel karena sudut fasanya belum sesuai, salah satu harus dikurangi sedikit atau dilebihi sedikit untuk mendapatkan sudut fasa yang tepat. Setelah dapat disinkron dan berhasil sinkron baru kedua generator mempunyai frekuensi yang sama-sama persis. Gambar 2.8 Contoh panel sinkronisasi pada PLTU Bilamana salah satu syarat diatas tidak dipenuhi, maka antara kedua sistem yang diparalelkan akan terjadi selisih-selisih tegangan yang dapat menyebabkan arus balik sehingga dapat menimbulkan kerusakan-kerusakan pada mesin-mesin. Dalam praktek ada suatu alat yang dapat mengecek ketiga syarat tersebut yaitu yang disebut sinkronoskop. Diantara sinkronoskop antara lain : sinkronoskop lampu, pengukur volt nol, dan osilograf elektron yang dapat dipergunakan sebagai sinkronoskop. Dalam proyek akhir ini hanya menggunakan sinkronoskop lampu. 19 2.3.3 Proses Sinkronisasi Proses Sinkronisasi pada generator 1 fasa dan generator 3 fasa pada prinsipnya sama, yang menjadi pembeda pada generator 3 fasa terdapat urutan fasa sehingga lampu sinkronoskop 3 buah. Proses sinkronisais secara manual dapat diuraikan sebagai berikut : 1. Mengatur kecepatan regulator turbin sehingga frekuensi generator mendekati frekuensi sistem. 2. Mengatur Eksitasi sehingga tegangan generator sama dengan tegangan sistem. 3. Putar selector switch pada posisi lokal kontrol. 4. Tekan push button supply generator 1 dengan generator 2. 5. Amati sudut fase antara generator 1 dan generator 2 melalui synchronoscop. a) Cek tegangan generator, harus sama dengan generator yang akan diparalel. b) Tunggu sampai lampu synchronoscope mati/gelap. 6. Arahkan selector switch kearah sinkron ketika tegangan dan frekuensi sama, serta lampu syncronoscope pada keadaan gelap. 7. Setelah itu sinkron telah selesai dan mampu menyuplai beban. 2.4 Metode Sinkronoskop Lampu 2.4.1 Sinkronoskop Lampu Gelap Jenis sinkronoskop lampu gelap pada prinsipnya menghubungkan antara ketiga fasa, yaitu U dengan U, V dengan V dan W dengan W. Untuk lebih jelasnya dapat dilihat pada gambar berikut : 20 Gambar 2.9 sekema sinkronoskop Lampu Gelap Pada hubungan ini jika tegangan antara fasa adalah sama maka ketiga lampu akan gelap yang disebabkan oleh beda tegangan yang ada yaitu nol. Demikian juga sebaliknya, jika lampu menyala maka diantara fasa terdapat beda tegangan. 2.4.2 Sinkronoskop Lampu Terang Jenis sinkronoskop lampu gelap pada prinsipnya menghubungkan antara ketiga fasa, yaitu U dengan U, V dengan V dan W dengan W. Untuk lebih jelasnya dapat dilihat pada gambar berikut : Gambar 2.10 sekema sinkronoskop Lampu Terang 21 Sinkronoskop jenis ini merupakan kebalikan dari sinkronoskop lampu gelap. Jika antara fasa terdapat beda tegangan maka ketiga lampu akan menyala sama terang dan generator siap diparalelkan . kelemahan dari sinkronoskop ini adalah kita tidak mengetahui seberapa terang lampu tersebut sampai generator siap diparalelkan. 2.4.3 Sinkronoskop Lampu Terang Gelap Sinkronoskop jenis ini merupakan perpaduan antara sinkronoskop lampu dan terang. Prinsip dari sinkronoskop ini adalah dengan menghubungkan gelap antara ketiga fasa, yaitu U dengan U, V dengan V dan W dengan W. Untuk lebih jelasnya dapat dilihat pada gambar berikut : Gambar 2.11 sekema sinkronoskop Lampu Terang Gelap Pada sinkronoskop ini generator siap diparalel, jika satu lampu gelap dan 2 lampu lainnya terang. 2.5 Perangkat Kontrol 2.5.1 AVR ATMega 16 AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis aristektur Reduced Instruction Set Computer (RISC). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general-purpose, timer/Counter fleksibel dengan mode compare, interrup internal dan eksternal, 22 serial UART, programmable Watchdog Timer, dan mode power saving, ADC dan PWM internal. AVR juga mempunyai In-system Programmable Flash on-chip yang menijinkan memeori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI. ATMega 16 mempunyai throughput mendekati 1 MIPS per MHz membuat disainer sistem untuk mengoptimasi konsumsi daya versus kecepatan proses. Beberapa keistimewaan dari AVR ATMega 16 antara lain : 1. Sistem mikrokontroler AVR 8 bit yang memiliki kemampuan tinggi dengan daya rendah. 2. CPU yang terdiri atas 32 register. 3. Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi 16 MHz. 4. Memiliki kapasitas flash memori 16 Kbyte, SRAM 1 Kbyte, dan EEPROM 512 byte. 5. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D. 6. Unit interupsi internal dan eksternal. 7. Port USART untuk komunikasi serial. 8. Fitur pheripheral, antara lain: a. Tiga buah timer/Counter dengan kemampuan perbandingan. b. Analog to Digital Converter (ADC) 10 bit sebanyak 8 channel. c. Real time counter dengan Oscilator tersendiri. d. Empat channel PWM. e. Watchdog timer dengan Oscilator internal. f. Byte-Oriented Two-wire Serial Interface. g. Port antarmuka SPI. h. Tegangan operasi 2,7 V – 5,5 V pada Atmega 16. 2.5.1.1 Konfigurasi pin AVR ATMega 16. Pin-pin pada ATMega 16 dengan kemasan 40-pin DIP (dual inline package) ditunjukan oleh gambar 2.12. Kemasan pin tersebut terdiri dari 4 Port, yaitu Port A, Port B, Port C, dan Port D yang masing-masing Port terdiri dari 8 23 buah pin. Selain itu juga terdapat RESET, VCC, GND 2 buah, VCC, AVCC, XTAL1, XTAL2, dan AREF. Gambar 2.12 Konfigurasi pin ATMega 16 Deskripsi dari pin-pin ATMega 16 adalah sebagi berikut : 1. VCC : suplai tegangan digital. 2. GND : Ground. 3. Port A : Port A sebagi input analog ke A/D konverter. Port A juga sebagai 8-bit bi-directional port I/0, jika A/D konverter tidak digunakan. Pin-pin port dapat menyediakan resistor-resistor internal pull-up. Ketika port A digunakan sebagai input dan pull eksternal yang rendah akan menjadi sumber arus jika resistor-resistor pull-up diaktifkan. Pin port A adalah tri-state ketika kondisi reset menjadi aktif sekalipun clock tidak aktif. 4. Port B : Port B adalah port I/O 8-bit bi-directional dengan resistor- resistor internal pull-up. Buffer output port B mempunyai karakteristik 24 drive yang simetris dengan kemampuan keduanya sink dan source yang tinggi. Sebagai input, port B yang mempunyai pull eksternal yang rendah port B adalah tri-state ketika kondisi reset menjadi aktif sekalipun clock tidak aktif. akan menjadi sumber arus jika resistor-resistor pull-up diaktifkan. Pin-pin 5. Port C : Port C adalah port I/O 8-bit bi-directional dengan resistor-resistor internal pull-up. Buffer output port C mempunyai karakteristik drive yang simetris dengan kemampuan keduanya sink dan source yang tinggi. Sebagai input, port C yang mempunyai pull eksternal yang rendah akan menjadi sumber arus jika resistor-resistor pull-up diaktifkan. Pin-pin port C adalah tri-state ketika kondisi reset menjadi aktif sekalipun clock tidak aktif. Jika antarmuka JTAG enable, resistor-resistor pull-up pada pin-pin PC5 (TD1), PC3 (TMS), PC2 (TCK) akan diaktifkan sekalipun menjadi reset. 6. Port D : Port D adalah port I/O 8-bit bi-directional dengan resistorresistor internal pull-up. Buffer output port D mempunyai karakteristik drive yang simetris dengan kemampuan keduanya sink dan source yang tinggi. Sebagai input, port D yang mempunyai pull eksternal yang rendah akan menjadi sumber arus jika resistor-resistor pull-up diaktifkan. Pin-pin port D adalah tri-state ketika kondisi reset menjadi aktif sekalipun clock tidak aktif. 7. Reset : sebuah low-level pulsa yang lebih lama daripada lebar pulsa minimum pada pin akan menghasilkan reset meskipun clock tidak berjalan. 8. XTAL1: Input inverting Oscilator dan input internal clock operasi rangkaian. 9. XTAL2: output dari inverting penguat Oscilator. 10. AVCC: Pin suplai tegangan untuk Port A dan A/D converter. Sebaliknya eksternal dihubungkan ke VCC meskipun ADC tidak digunakan. Jika ADC digunakan seharusnya dihubungkan ke VCC melalui low pass filter. 11. AREF : Pin referensi analog untuk A/D konverter. 25 2.5.1.2 Arsitektur ATMega 16 Mikrokontroler AVR menggunakan konsep arsitektur Harvard yang memisahkan memori dan bus untuk data dan program untuk memaksimalkan kemampuan dan kecepatan. Instruksi dalam memori program dieksekusi dengan pipelining single level. Dimana ketika satu instruksi dieksekusi, instruksi berikutnya diambil dari memori program. Konsep ini mengakibatkan instruksi dieksekusi setiap clock cycle. Selain itu, mikrokontroler AVR juga mengimplementasikan RISC sehingga eksekusi instruksi dapat berlangsung cepat dan efisien. sangat Gambar 2.13 Arsitektur ATMega 16 26 2.5.1.3 Komunikasi Serial Universal synchronous dan asynchronous pemancar dan penerima serial adalah suatu alat komunikasi sangat fleksibel. yang utama : Jenis a) Operasi full duplex (register penerima dan pengirim serial dapat berdiri sendiri). b) Operasi asychronous atau synchronous. c) Master atau slave mendapat clock dengan operasi synchronous. d) Pembangkit baud rate dengan resolusi tinggi. e) Dukung frames serial dengan 5, 6, 7, 8 atau 9 data bit dan 1 atau 2 Stop bit. f) Tahap odd atau even parity dan parity check didukung oleh hardware. g) Pendeteksian data over run. h) Pendeteksi framing error. i) Pemfilteran gangguan (noise) meliputi pendeteksian bit false start dan pendeteksian low pass filter digital. j) Tiga interupsi terdiri dari TX complete, TX data register empty dan RX complete. k) Mode komunikasi multi-processor. l) Mode komunikasi double speed asynchronous. 2.5.1.4 Sistem Minimum ATMega 16 Sistem minimum adalah rangkaian elektronika yang terdiri dari komponen – komponen dasar yang dibutuhkan oleh suatu mikrokontroler untuk dapat berfungsi dengan baik. Pada umumnya, suatu mikrokontroler membutuhkan tiga elemen untu berfungsi yaitu power supply, kristal oscillator (XTAL), dan rangkaian RESET. a. Power Supply Catu daya merupakan nyawa bagi sismin ATMega 16. Tanpa catu daya, komponen sismin ini tidak akan pernah berfungsi. Catu daya untuk sismin ini 27 adalah tegangan DC yang inputnya diberi 5 Volt DC. Untuk itu tegangan AC 220 Volt harus ditransformasikan ke 12 Volt dan selanjutnya di searahkan sehingga bisa menyuplai kebutuhan sismin ATMega 16. b. Oscillator Analogi fungsi kristal oscillator adalah jantung pada tubuh manusia, perbedaan jantung memompa darah dan seluruh kandungannya sedangkan XTAL memompa data. Kristal yang digunakan 16 MHz, lebih dari 0,9 MHz sehingga kapasitor yang dipasang masing – masing bernilai 22 pF. Mode operasi kristal dapat dilihat pada tabel berikut. Tabel 2.1 Mode operasi Oscillator kristal Gambar 2.14 Rangkaian Kristal Untuk kombinasi asinkron maka digunakan seting baudrate 9600 bps karena kristal yang digunakan 16 MHz sehingga error yang terjadi hanya 0,2%. 28 Tabel 2.2 Contoh Pengaturan Frekuensi Osilator untuk 16 MHz Baud Fosc=16.000 MHz rate U2X=0 (bps) UBRR U2X=1 Error (%) UBRR Error (%) 2400 416 -0.1 832 0.0 4800 9600 14.4k 19.2k 28.8k 38.4k 57.6k 76.8k 115.2k 230.4k 250k 0.5M 1M (1) Max 207 103 68 51 34 25 16 12 8 3 3 1 0 0.2 0.2 0.6 0.2 -0.8 0.2 2.1 0.2 -3.5 8.5 0.0 0.0 0.0 1 Mbps 416 207 138 103 68 51 34 25 16 8 7 3 1 -0.1 0.2 -0.1 0.2 0.6 0.2 -0.8 0.2 2.1 -3.5 0.0 0.0 0.0 2 Mbps a. RESET Fungsi rangkaian RESET adalah untuk membuat mikrokontroler memulai kembali pembacaan program, hal tersebut dibutuhkan pada saat mikrokontroler mengalami gangguan dalam mengeksekusi program atau bisa saja ketika On, mikrokontroler mengalami error sehingga eksekusi program tidak dimulai dari awal. Dengan RESET berperan untuk mengembalikan mikrokontroler untuk mengeksekusi program secara berurutan yang dimulai dari awal. 2.5.2 IC LM 324 IC LM324 merupakan IC Operational Amplifier, IC ini mempunyai 4 buah op-amp yang dapat berfungsi sebagai comparator. IC ini mempunyai tegangan kerja antara +5 V sampai +15V untuk +Vcc dan -5V sampai -15V untuk -Vcc. Berikut merupakan gambar IC LM324 : 29 Gambar 2.15 IC LM 324 dilihat dari atas Gambar 2.16 koneksi diagram LM 324 Adapun definisi dari masing-masing pin IC LM324 adalah sebagai berikut : 1) Pin 1,7,8,14 (Output) merupakan sinyal output. 2) Pin 2,6,9,13 (Inverting Input) semua sinyal input yang berada di pin ini akan mempunyai output yang berkebalikan dari input. 3) Pin 3,5,10,12 (Non-inverting input) semua sinyal input yang berada di pin ini akan mempunyai output yang sama dengan input (tidak berkebalikan). 4) Pin 4 (+Vcc) pin ini dapat beroperasi pada tegangan antara +5 Volt sampai +15 Volt. 5) Pin 11 (-Vcc) pin ini dapat beroperasi pada tegangan antara -5 Volt sampai -15 Volt. Tabel 2.3 Karakteristik Kelistrikan LM 324 Parameter Kondisi LM 324 Min Uni Type Max TA = 25 ˚ C 2 3 mV Arus bias IIN (+) or IIN (--),VCM = 0 V, 45 100 nA masukkan TA = 25 ˚ C Offset tegangan masukkan 30 Tabel 2.3 Karakteristik Kelistrikan LM 324 (Lanjutan) Parameter Kondisi Min Offset arus IIN (+) or IIN (--),VCM = 0 V, masukkan TA = 25 ˚ C Input common- V+ = 30 V, modee voltage TA = 25 ˚ C LM 324 0 Uni Type Max 5 30 nA 1.5 3 V 0.7 1.2 mA range suplai Arus Over Full Temperatur Range RL = ∞ On All Op Amp V+ = 30 V V+ = 5 V Large signal V+ = 15, RL ≥ 2kΩ, (Vo = 1 V to voltage gain 11 V), TA = 25 ˚ C Common-mode 25 100 V/mV DC, Vcm = 0 V to V+ 65 85 dB Power Supply V+ = 0 V to 30 V 65 100 dB Rejection Rasio TA = 25 ˚ C 2.5.3 IC LM2917 IC LM2917 merupakan chip IC yang di desain khusus sebagai Frequency to Voltage Converter atau pengubah Frekuensi menjadi Tegangan. Dalam penggunaanya untuk aplikasi Frequency to Voltage Converter IC LM2917 ini memerlukan sedikit komponen eksternal. Ada beberapa contoh aplikasi Frequency to Voltage Converter dari IC LM2917 ini yang disertakan dalam datahseet IC LM2917 tersebut. Disini rangkaian Frequency to Voltage Converter diambil juga dari datasheet IC LM2917. Kelebihan dari single chip Frequency to Voltage Converter LM2917 ini adalah mampu memberikan output 0 volt seketika pada waktu frekuensi berubah 0 Hz. Sangat mudah diaplikasikan dalam pengukuran frekuensi dengan rumusan output single chip Frequency to Voltage Converter ini adalah : VOUT = fin x Vcc x R1 x C1......................................................(2.8) 31 Single chip Frequency to Voltage Converter LM2917 ini hanya membutuhkan konfigurasi RC saja dalam doubling frequncy. Dan memiliki zener regulator internal untuk mengahasilkan akurasi dan stabilitas dalam proses konversi frekuensi ke tegangan. Gambar 2.17 Arsitektur LM2917 Feature yang dimiliki single chip Frequency to Voltage Converter LM2917 : 1. Referensi ke ground secara langsung dengan variabel reluctance. 2. Op Amp / Komparator dengan output transistor. 3. Arus maksimal output 50 mA untuk aplikasi langsung ke beban. 4. Frequency doubling untuk ripel rendah. 5. Output yang linier ±0.3%. 2.5.4 IC LM 74LS86 Gerbang XOR merupakan kata lain dari exclusive OR. XOR akan memberikan output logika "1", jika inputnya memberikan keadaanyang berbeda. Dan jika inputnya memberikan keadaan yang sama, maka outputnya akan memberikan logika "0". Gambar 2.18 Simbol XOR 32 Untuk menguji gerbang XOR, digunakan IC74LS86. Dimana struktur dari IC ini adalah: Gambar 2.19 koneksi diagram IC LM 74LS86 Tabel 2.4 Tabel Kebenaran XOR Inputs A Output B Y L L L L H H H L H H H L 2.5.5 IC LM 7805 dan IC LM 7812 Pemasangan regulator tegangan pada catu daya adalah untuk menstabilkan tegangan keluaran apabila terjadi perubahan tegangan masukan pada catu daya. Fungsi lain dari regulator tegangan adalah untuk perlindungan dari terjadinya hubung singkat pada beban. Salah satu tipe regulator tegangan tetap adalah LM78XX. Regulator tegangan tipe LM78XX adalah salah satu regulator tegangan tetap dengan tiga terminal, yaitu terminal VIN, GND dan VOUT. Tegangan keluaran dari regulator LM 78XX memungkinkan regulator untuk dipakai dalam sistem logika, dan instrumentasi. Regulator tegangan LM 78XX 33 dirancang sebagai regulator tegangan tetap, meskipun demikian dapat juga keluaran dari regulator ini diatur tegangan dan arusnya melalui tambahan komponen eksternal. Cara pemasangan regulator tegangan tetap LM 78XX pada catu daya dapat dilihat pada gambar berikut. Gambar 2.19 IC LM 78XX Kelebihan : • Keluaran sampai sekarang untuk 1A • Tegangan Keluaran dari 5, 6, 8, 9, 10, 12, 15, 18, 24 • Perlindungan Thermal Overload • Perlindungan pendek Sirkuit • Output Transistor Aman Operasi Kawasan Lindung Tabel 2.5 Karakteristik kelistrikan IC LM 7805 Symbol V Parameter Output Voltage O Conditions Typ. Max. Unit 4.8 5.0 5.2 V 4.75 5.0 5.25 – – 4.0 1.6 100 50.0 mV – 9.0 100 mV – 4.0 50.0 – 5.0 8.0 mA – 0.03 0.5 mA VI = 7V to 25V IO = 5mA – 0.3 1.3 – -0.8 – f = 10Hz to 100kHz, – 42.0 – 62.0 73.0 – µV/VO dB – 2.0 – V – 15.0 – mΩ TJ = +25°C 5mA ≤ IO ≤ 1A, PO ≤ 15W, VI = Regline Line Regulation(1) TJ = V = 7V to 25V 7V to 20VO VI = 8V to 12V +25°C Regload Load Regulation(1) TJ = IO = 5mA to 1.5A I ∆I Q +25°C IO = 250mA to Quiescent Current TJ = +25°C 750mA Quiescent Current IO = 5mA to 1A Q Change ∆VO/∆ Output Voltage Output VTN Drift(2)Noise RR Voltage Ripple Rejection(2) VDROP Dropout Voltage Or Output Resistance fTA = 120Hz, = +25°CVO = 8V to 18V IO = 1A, TJ = +25°C f = 1kHz Min. mV/°C 34 Tabel 2.5 Karakteristik kelistrikan IC LM 7805 (Lanjutan) Symbol ISC IPK Parameter Short Circuit Current Peak Current(2) Min. Typ. Max. Unit VI = 35V, TA = +25°C – 230 – mA TJ = +25°C – 2.2 – A Tabel 2.6 Karakteristik IC LM 7812 Symbol VO Parameter Max. Unit 11.5 n. 12.0 12.5 V 11.4 12.0 12.6 VI = 14.5V to 30V VI = 16V to 22V – 10.0 240 – 3.0 120 IO = 5mA to 1.5A – 11.0 240 IO = 250mA to +25°C TJ = +25°C 750mA – 5.0 120 – 5.1 8.0 mA IO = 5mA to 1A VI = 14.5V to 30V – 0.1 0.5 mA – 0.5 1.0 – -1.0 – mV/° Output Noise Voltage f = 10Hz to 100kHz, TA = +25°C – 76.0 – 55.0 71.0 – µV/V C Od – 2.0 – – 18.0 – V B mΩ – 230 – mA – 2.2 – A Output Voltage Conditions TJ = +25°C 5mA ≤ IO ≤ 1A, PO ≤ Conditions TJ = +25°C Regload Load Regulation(11) TJ = I Quiescent Current ∆I Q Quiescent Current Q Change ∆VO/∆ Output Voltage Drift IO = 5mA Ripple Rejection(12) f = 120Hz, VI = 15V to 25V Dropout Voltage VDROP IO = 1A, TJ = +25°C R r Output Resistance f = 1kHz I O SI Typ. 15W, VI = 14.5V to 27V Regline Line Regulation(11) T V R N Mi Short Circuit Current VI = 35V, TA = +25°C TJ = +25°C Peak Current(12) mV mV P C K 2.5.6 Liquid Crystal Display (LCD) Liquid Crystal Display (LCD) adalah suatu jenis media tampilan yang menggunakan kristal cair sebagai penampilan utama. Gambar 2.20 Bentuk fisik LCD 4 x 20 Karakter 35 LCD dengan jumlah kecil segmen, memiliki kontak listrik individu untuk segmen. Sebuah sirkuit berdedikasi eksternal pasokan muatan listrik untuk setiap mengontrol setiap segmen. Setruktur layar berat selama lebih dari beberapa elemen layar. Menampilkan monokrom kecil seperti yang ditemukan oleh organizer pribadi, timbangan elektronik, layar laptop lebih tua, dan nitendo game boy asli memiliki struktur matriks pasif menggunakan super-twisted nematic (STN) atau double-layer STN (DSTN) teknologi (ini memecahkan masalah dengan perubahan warna) dan warna STN (CSTN), dimana warna ditambahakan dengan menggunkan filter internal. Setiap baris atau kolom dari layar memiliki sirkuit listrik tunggal. Pixel ditanganai satu per satu waktu dengan alamat baris dan kolom. 2.6 Perangkat Lunak Bahasa Basic ( BASCOM-AVR IDE 1.11.9.8) BASCOM-AVR IDE 1.11.9.8 adalah program BASIC compailer berbasis windows untuk mikrokontroler keluarga 8051 seperti AT89C51, ATB9C2051, dan yang lainnya. BASCOM-AVR IDE 1.11.9.8 merupakan pemograman dengan bahasa tingkat tinggi BASIC yang dikembangkan dan dikeluarkan oleh MCS Elektronik. 2.6.1 Karakter dalam BASCOM-AVR IDE 1.11.9.8 Dalam program BASCOM, karakter dasarnya terdiri atas karakter alpabhet (A-Z dan a-z), karakter numeric (0-9), dan karakter sepesial lihat tabel dibawah ini : Tabel 2.7 Karakter Dalam Bascom Karakter Nama Blank „ Apostrophe * Asterisk (symbol perkalian) + (plus sign , Comma - Minus sign 36 Tabel 2.7 Karakter Dalam Bascom (Lanjutan) Karakter Nama . Period (decimal point) / Slash (division symbol) will be handled as\ : Colon ; Semicolon < \ Less than Backspace (integer or word division symbol 2.7.2 Tipe Data Setiap variabel dalam BASCOM memiliki tipe data yang menunjukkan daya tampungnya. Hal ini berhubungan dengan penggunaan memori mikrokontroler. Berikut adalah tipe data pada BASCOM : Tabel 2.8 Tipe data pada Bascom Tipe Data Ukuran (byte) Range Bit 1/8 - Byte 1 0-255 Integer 2 -32,768 - +32,767 Word 2 0-65535 Long 4 -214783648 - +214783647 Single 4 - String Hingga 256 byte - 2.6.3 Variabel Variabel adalah suatu pengenal (identifier) yang digunakan dalam mewakili suatu nilai tertentu di dalam proses program. Nilai dari suatu variabel bisa diatur sesuai dengan kebutuhan. Nama dari suatu variabel dapat ditentukan sendiri oleh pemrogram dengan aturan sebagai berikut: a. Nama variabel hanya boleh terdiri dari abjad, bilangan, dan tanda hubung. b. Panjangnya maksimum 32 karakter c. Tidak boleh menggunakan spasi 37 d. Tidak boleh menggunakan simbol khusus seperti : !,@,#,$,%,^,&,*,-,+,=, dan sebagainya. Alias 2.6.4 Dengan menggunkan alias, variabel yang sama dapat diberikan nama yang lain. Tujuannya adalah mempermudah proses pemograman. Umumnya, alias digunkan untuk mengganti nama variabel yang baku, seperti port mikrokontroler. LEDBAR alias P1 Tombol1 alias P0.1 Tombol2 alias P0.2 Dengan deklarasi seperti diatas, perubahan pada tombol akan mengubah kondisi P0.1. selain mengganti nama port, kita dapat pula menggunakan alias untuk mengakses bit tertentu dari sebuah variabel yang telah dideklarasikan. Dim LedBar as byte, Ledl as LedBar.0, Led2 as LedBar.1, Led3 as LedBar.2. 2.6.5 Konstanta Dalam BASCOM, selain variabel kita mengenal pula konstanta. Konstanta merupakan variabel juga. Perbedaannya dengan variabel biasa adalah nilai yang dikandung tetap. Dengan konstanta, kode program yang dibuat akan lebih mudah dibaca dan dapat mencegah kesalahan penulisan pada program yang kita buat. Misalnya, kita akan lebih mudah menulis phi daripada menulis 3,14159867. Sama seperti variabel, agar konstanta bisa dikenali oleh program, maka harus dideklarasikan terlebih dahulu. Berikut adalah cara pendeklarasian sebuah konstanta. DIM A As Const 5 DIM B1 As Const &B1001 Cara lain yang paling mudah : Const Cbyte = &HF Const Cint = -1000 Const Csingle = 1.1 Const Cstring = “test” 38 2.6.6 Array Dengan Array, kita bisa menggunakan sekumpulan variabel dengan nama dan tipe yang sama. Untuk mengakses variabel tertentu dalam array, kita harus menggunakan indeks. Indeks harus berupa angka dengan tipe data byte, integer, atau word. Artinya, nilai maksismum sebuah indeks sebesar 65535. Proses pendeklarasian sebuah array hampir sama dengan variabel, namun perbedaan kita pun mengikutikan jumlah elemennya. Berikut adalah contoh pemakaian array ; Dim kelas (10) as byte, c as Integer For C = 1 to 10 a(c) = c p1 = a(c) Next Program diatas membuat sebuah array dengan nama „kelas‟ yang berisi 10 elemen (1-10) dan kemudian seluruh elemennya diisian dengan nilai c yang berurutan. Untuk membacanya, kita menggunakan indeks dimanaelemen disimpan. Pada program diatas, elemen-elemen arraynya dikeluarkan ke port 1 dari mikrokontroler. 2.6.7 Analog to Digital Converter Proses konversi data analog menjadi digital merupakan proses penting dalam proses akusisi data. Proses konversi ini dilakukan oleh sebuah komponen yang dinamakan analog to digital converter (ADC). ADC memiliki dua karakter prinsip, yaitu kecepatan sampling dan resolusi. Kecepatan sampling suatu ADC menyatakan seberapa sering sinyal analog dikonversikan ke bentuk sinyal digital pada selang waktu tertentu. Kecepatan sampling biasanya dinyatakan dalam sample persecond (SPS). Resolusi ADC menentukan ketelitian nilai hasil konversi ADC. Sebagai contoh: 1). ADC 8 bit akan memiliki output 8 bit data digital, ini berarti sinyal input dapat dinyatakan dalam 255 (2n – 1) nilai diskrit. 2). ADC 12 bit memiliki 12 bit output data digital, ini berarti sinyal input dapat dinyatakan dalam 4096 nilai diskrit. Dari contoh di atas ADC 12 bit akan memberikan ketelitian nilai hasil konversi 39 yang jauh lebih baik daripada ADC 8 bit. Jenis ADC mikrokontroler ATMega 16 adalah 10 bit successive approximation dengan tegangan referensi (Vref) sebesar 5V DC. Contohnya untuk dapat mengetahui besarnya tegangan yang diterima oleh mikrokontroler dapat menggunakan persamaan di bawah ini : ........................................................................................................................(2.9) Keterangan : Resolusi ADC = Resolusi ADC yang digunakan Vin = Nilai tegangan yang masuk ke ADC Vref = Nilai tegangan referensi