BAB II TINJAUAN PUSTAKA 2.1 Motor Induksi Tiga Fasa - USU-IR
advertisement

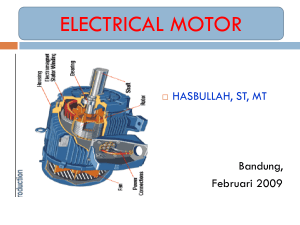
BAB II TINJAUAN PUSTAKA 5 2.1 Motor Induksi Tiga Fasa Motor induksi tiga fasa adalah mesin arus bolak – balik (AC) yang berfungsi mengubah atau mengkonversi sumber tenaga listrik AC menjadi tenaga mekanik dalam bentuk putaran rotor. Sesuai penamaannya, motor ini berputar akibat adanya arus induksi yang disuplai ke bagian rotor. Arus induksi ini berasal dari perbedaan relatif putaran rotor dan medan putar yang dihasilkan oleh stator [1]. Sehingga motor ini sering disebut motor tidak serempak. Motor induksi tiga fasa bekerja berdasarkan prinsip induksi elektromagnetik, dimana arus yang mengalir pada kumparan – kumparan stator mempunyai beda fasa 120°. Beda fasa ini akan menghasilkan medan putar pada stator yang akan memotong kumparan rotor sehingga menginduksi tegangan pada rotor. Karena rotor adalah rangkaian tertutup maka arus akan mengalir pada kumparan rotor. Arus pada rotor ini akan menimbulkan momen (gaya) yang akan memutar rotor. 2.1.1 Konstruksi Motor Induksi Tiga Fasa Pada prinsipnya motor dan generator induksi tiga memiliki konstruksi yang sama. Hanya aja fungsi dan prinsip kerja dari keduanya berbeda. Generator memanfaatkan energi gerak untuk menghasilkan tenaga listrik sementara motor memanfaatkan energi listrik untuk menghasilkan energi gerak berupa putaran. Universitas Sumatera Utara 6 Gambar 2.1 berikut menunjukkan bentuk fisik dari sebuah motor induksi tiga fasa. Dari gambar 2.1 dapat kita lihat bagian stator dan rotor motor induksi tiga fasa. Gambar 2.1 Penampang stator dan rotor motor induksi tiga fasa Konstruksi atau bagian utama dari motor induksi tiga fasa adalah : • Stator, adalah bagaian yang diam pada motor induksi tiga fasa. Pada bagian ini dihubungkan ke sumber tegangan tiga fasa. Stator terdiri dari lapisan laminasi inti yang memiliki alur yang menjadi tempat kumparan dililitkan yang berbentuk silindris. Gambar 2.2 dibawah menunjukkan bentuk fisik dari stator motor induksi tiga fasa. Gambar 2.2 Tumpukan inti dan kumparan dalam cangkang stator Universitas Sumatera Utara Tiap lapisan laminasi inti dibentuk dari lempengan besi. Tiap lempengan besi tersebut memiliki beberapa alur dan beberapa lubang pengikat untuk menyatukan inti. Tiap kumparan tersebar dalam alur yang disebut belitan 7 fasa dimana untuk motor tiga fasa, belitan tersebut terpisah secara listrik sebesar 120° [2]. Sesaat setelah dihubungkan dengan sumber tegangan tiga fasa, maka akan dihasilkan medan putar pada stator. • Rotor, adalah bagian yang berputar pada motor induksi tiga fasa. Rotor terdiri dari susunan belitan jangkar yang disusun sedemikian rupa. Medan putar pada stator akan memotong belitan pada rotor. Karena rotor adalah rangkaian tertutup maka arus akan mengalir pada belitan rotor. Arus ini akan menimbulkan gaya yang akan menggerakkan rotor searah putaran medan stator. Rotor pada motor induksi tiga fasa ada dua jenis yaitu rotor belitan dan rotor sangkar. Pada penelitian ini akan digunakan jenis rotor belitan. Rotor belitan terdiri dari satu set lengkap belitan tiga fasa yang merupakan bayangan dari belitan statornya. Belitan tiga fasa pada rotor belitan biasanya terhubung Y, dan masing-masing ujung dari tiga kawat belitan fasa rotor tersebut dihubungkan pada slip ring yang terdapat pada poros rotor [2]. Gambar 2.3 menunjukkan bentuk dua dimensi rotor belitan. Universitas Sumatera Utara Gambar 2.3 Rotor belitan 8 Gambar 2.4 Skematik diagram motor induksi rotor belitan Pada gambar 2.4 dapat dilihat bahwa slip ring hanya berfungsi sebagai penghubung belitan rotor dengan tahanan luar. Tahanan luar ini digunakan sebagai pembatas ataupun pengatur arus mula yang besar pengasutan saat start motor. Besar tahanan akan dikurangi secara perlahan hingga nilainya nol sebagaimana motor akan berputar hingga kecepatan nominalnya. • Celah udara, adalah bagian atau celah sempit yang memisahkan antara bagian stator dan rotor. Bagian ini memungkinkan rotor dapat berputar di dalam stator. Celah udara ini berjarak 0,4 mm sampai 4 mm [2]. Universitas Sumatera Utara 2.1.2 Medan Putar Tiga Fasa Bila kita menghubungkan terminal belitan stator dengan sumber tegangan tiga fasa ( R, S, T ), maka arus sinusoidal IR, IS, dan IT akan mengalir menuju belitan stator. Arus ini akan menimbulkan ggm ( gaya gerak magnet) pada belitan stator. Gaya gerak magnet tersebut menghasilkan fluks yang berputar sehingga tercipta medan putar pada belitan stator [2]. Medan magnet yang demikian kutub kutubnya tidak diam pada posisi tertentu, tetapi melakukan pergeseran posisinya disekitar stator.Untuk melihat bagaimana medan putar dibangkitkan, maka dapat diambil contoh pada motor induksi tiga fasa dengan jumlah dua kutub. Fluks yang dihasilkan oleh arus bolak - balik pada belitan stator adalah : 9 a) ΦR = Φm sin ωt …………………………………………….........…... (2.1a) b) ΦS = Φmsin (ωt – 120°)…………………………………………..… (2.1b) c) ΦT = Φm sin (ωt – 240° )………………………………………….… (2.1c) Gambar 2.5 Arus fasa seimbang Universitas Sumatera Utara Gambar 2.6 Diagram fasor fluksi tiga fasa seimbang a) Pada keadaan 1 (gambar 2.6), ωt = 0; arus dalam fasa R bernilai nol sedangkan besarnya arus pada fasa S dan fasa T memiliki nilai yang sama 10 dan arahnya berlawanan. Dalam keadaan seperti ini arus sedang mengalir ke luar dari konduktor sebelah atas dan memasuki konduktor sebelah bawah. Sementara resultan fluks yang dihasilkan memiliki besar yang konstan yaitu sebesar 1,5 Φm dan dibuktikan sebagai berikut : ΦR= 0 ΦS = Φm sin ( -120° ) =-1,5 Φm ΦT = Φm sin ( -240° ) = 1,5 Φm b) Pada keadaan 2, arus bernilai makasimum negatif pada fasa S, sedangkan pada fasa R dan fasa T bernilai 0,5 maksimum pada fasa R dan fasa T, dan pada saat ini ωt = 30°, oleh karena itu fluks yang diberikan masing – masing fasa : ΦR= Φm sin ( -120° ) = 0,5 Φm ΦS = Φmsin ( -90° ) =- Φm Universitas Sumatera Utara ΦT = Φm sin ( -210°) = 0,5 Φm c) Pada keadaan 3 ωt = 60°, arus pada fasa R dan fasa T memiliki besar yang sama dan arahnya berlawan, oleh karena itu fluks yang diberikan oleh masing – masing fasa : ΦR= Φmsin ( 60° ) = 1,5 Φm ΦS = Φmsin ( -60° ) =-1,5 Φm 11 ΦT = Φm sin ( -180°) = 0 Φm d) Pada keadaan 4 ωt = 90°, arus pada fasa R maksimum (positif), dan arus pada fasa S dan fasa T = 0,5 Φm, oleh karena itu fluks yang diberikan oleh masing – masing fasa : ΦR= Φmsin ( 90° ) = Φm ΦS = Φmsin ( -30° ) =-0,5 Φm ΦT = Φm sin ( -150°) = -0,5 Φm 2.1.3 Prinsip Kerja Motor Induksi Tiga Fasa Seperti yang telah dijelaskan sebelumnya, apabila sumber tegangan tiga fasa dihubungkan pada terminal belitan stator maka akan timbul medan putar dengan kecepatan : 𝑛𝑛𝑠𝑠 = 120𝑓𝑓 𝑝𝑝 ................................................................................. (2.2) Medan putar stator menghasilkan fluksi yang berubah – ubah tiap satuan waktu. Fluksi tersebut akan memotong belitan konduktor pada rotor. Akibatnya Universitas Sumatera Utara pada belitan rotor timbul tegangan induksi (ggl). Karena belitan rotor adalah rangkaian tertutup, maka ggl (E) akan menghasilkan arus (I). Arus pada rotor menimbulkan medan magnet pada rotor. Medan magnet pada rotor akan menghasilkan fluksi. Interaksi antara fluksi medan stator dan fluksi medan rotor menimbulkan gaya putar (F) yang akan memutar rotor. Bila kopel mula yang dihasilkan gaya (F) pada rotor yang cukup besar untuk memikul kopel beban, rotor akan berputar searah dengan medan putar stator [1]. Agar rotor berputar maka diperlukan perbedaan relatif antara kecepatan medan magnet putar stator ( ns ) dengan kecepatan putar rotor ( nr ). Perbedaan kecepatan antara ns dan nr disebut slip ( S ) dinyatakan dengan : 𝑆𝑆 = (𝑛𝑛 𝑠𝑠 −𝑛𝑛 𝑟𝑟 ) 𝑛𝑛 𝑠𝑠 × 100%............................................................. (2.3) Karena belitan rotor merupakan rangkaian tertutup, baik melalui cincin ujung (end ring) ataupun tahanan luar, maka arus akan mengalir pada konduktorkonduktor rotor. Karena konduktor-konduktor rotor yang mengalirkan arus ditempatkan di dalam daerah medan magnet yang dihasilkan stator, maka akan terbentuklah gaya mekanik (gaya lorentz) pada konduktor-konduktor rotor. Hal ini sesuai dengan hukum gaya lorentz yaitu bila suatu konduktor yang dialiri arus berada dalam suatu kawasan medan magnet, maka konduktor tersebut akan mendapat gaya elektromagnetik (gaya lorentz) sebesar : F = B.i.l.sin θ......................................................................................(2.4) dimana, F = gaya yang bekerja pada konduktor (Newton) Universitas Sumatera Utara B = kerapatan fluks magnetik (Wb/m2) i = besar arus pada konduktor (A) l = panjang konduktor (m) θ = sudut antara konduktor dan vektor kerapatan fluks magnetik Gaya F ini adalah hal yang sangat penting karena merupakan dasar dari bekerjanya suatu motor listrik. 13 Arah dari gaya elektromagnetik tersebut dapat dijelaskan oleh kaidah tangan kanan (right-hand rule). Kaidah tangan kanan menyatakan, jika jari telunjuk menyatakan arah dari vektor arus i dan jari tengah menyatakan arah dari vektor kerapatan fluks B, maka ibu jari akan menyatakan arah gaya F yang bekerja pada konduktor tersebut. Gaya F yang dihasilkan pada konduktor-konduktor rotor tersebut akan menghasilkan torsi (τ). Bila torsi mula yang dihasilkan pada rotor lebih besar daripada torsi beban (τ0 > τb), maka rotor akan berputar searah dengan putaran medan putar stator. Bila nr = ns, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada belitan rotor, dengan demikian tidak dihasilkan kopel. Kopel motor akan timbul apabila nr < ns [1]. 2.1.4 Pengereman Motor Induksi Tiga Fasa Pengereman dalam motor listrik adalah suatu usaha untuk mengurangi atau menahan kecepatan putaran rotor motor listrik hingga putaran rotor berhenti pada Universitas Sumatera Utara sesuai dengan waktu yang dibutuhkan. Dalam perancangan sebuah pengereman pada motor induksi tiga fasa perlu diperhatikan beberapa aspek yang dapat mempengaruhi sistem kerja motor induksi tiga fasa. Beberapa diantaranya adalah waktu yang diperlukan relatif singkat sehingga tidak mempengaruhi waktu operasi motor, pengereman yang baik diusahakan tidak menimbulkan rugi – rugi mekanis yang dapat menghasilkan panas pada motor. Ada beberapa sistem pengereman yang dapat diterapkan pada motor induksi tiga fasa, yaitu pengereman mekanis dan pengereman elektrodinamis. Pada pengereman elektrodinamis dibagi atas tiga jenis, yaitu pengereman dinamis, pengereman regeneratif, pengereman plugging. • Pengereman Mekanik Pada sistem ini pengereman dilakukan dengan menahan putaran rotor menggunakan sepatu rem atau drum rem. Sepatu rem atau drum dipasang pada poros rotor. Sepatu rem ditekan untuk menghasilkan torsi yang menahan putaran rotor. Dalam hal ini akan terjadi gesekan antara poros rotor dengan sepatu rem. Gesekan ini akan menimbulkan panas dan debu di sekitar komponen – komponen motor. Oleh karena itu untuk sistem pengereman yang baik, pengereman mekanis tidak dianjurkan [1]. • Pengereman Dinamis Pengereman dinamis ( Dynamic braking ) dilakukan dengan cara menginjeksikan arus dan tegangan DC pada belitan stator motor induksi tiga fasa sesaat setelah dilepaskan dari sumber tegangan tiga fasa. Arus searah yang diinjeksikan pada kumparan stator akan mengembangkan medan stasioner untuk menurunkan tegangan pada rotor dan menghasilkan medan Universitas Sumatera Utara magnet. Medan magnet akan berputar dengan kecepatan yang sama dengan rotor tetapi dengan arah yang berlawanan untuk menjadikan stasioner terhadap rotor. Interkasi medan resultan dan gaya gerak magnet rotor akan mengembangkan torsi yang berlawanan dengan torsi motor sehingga pengereman terjadi [3]. • Pengereman Regeneratif Pada prinspnya mesin listrik dinamis dapat bekerja sebagai motor ataupun 15 generator. Dalam sistem pengereman regeneratif, motor induksi tiga fasa akan beralih fungsi sebagai generator. Saat pengereman dilakukan, energi yang tersimpan pada putaran rotor dikembalikan ke jala – jala. Kondisi yang harus dicapai agar pengereman ini terjadi ialah ketika Ea> Vt, yang mengakibatkan daya kembali kepada sistem jala – jala untuk keperluan lain. Pada saat daya dikembalikan ke jala – jala, kecepatan menurun dan proses pengereman berlangsung seperti pada pengereman dinamis [1]. • Pengereman Plugging Metode pengereman plugging dilakukan dengan cara membalikkan arah putaran rotor sehingga motor dapat menghasilkan torsi penyeimbang dan membentuk daya perlambatan. Medan magnet yang dihasilkan akan berputar dengan kecepatan yang sama dengan rotor tetapi dengan arah yang berlawanan. Interaksi antara medan resultan dan gaya gerak magnet rotor akan mengembang torsi yang berlawanan dengan torsi awal rotor sehingga pengereman terjadi [4]. Universitas Sumatera Utara 2.2 Pengereman Regeneratif Pengereman regeneratif (regenerative braking) menjadi salah satu model pengereman yang dapat meminimalisir energi terbuang dari sebuah sistem pengereman. Artinya pengereman ini disandingkan dengan sistem pengereman lainnya. Secara etimologi regenerative berasal dari kata re-generate yang berarti dibangkitkan kembali. Sehingga secara garis besar pengereman regeneratifdapat digambarkan sebagai sebuah pengereman dengan jalan mengkonversikan energi mekanis menjadi bentuk energi lain yang dapat disimpan untuk digunakan kembali pada saat dibutuhkan. 16 Dalam penelitian ini sistem pengereman regeneratif dirancang untuk mengefesiensikan penggunaan dan pemanfaatan energi pada motor induksi tiga fasa. Metode pengereman regeneratif terjadi ketika rotor berputar lebih cepat daripada kecepatan medan putar stator sehingga terjadi slip negatif dan mesin menyuplai daya. Dengan kata lain motor berubah fungsi menjadi generator. Proses yang terjadi ketika bekerja sebagai generator induksi ialah kebalikan dari proses kerja motor induksi. Kopel pada rotor digerakkan oleh energi mekanik sisa, adanya magnetisasi sisa pada rotor cukup untuk membangkitkan tegangan awal. Untuk menguatkan magnetisasi pada rotor maka arus DC dialirkan ke rotor melalui rangkaian DC chopper. Adanya medan magnet yang berputar di rotor akan menginduksikan tegangan ke belitan stator sehingga pada terminal stator akan timbul tegangan bolak – balik. Tegangan bolak – balik ini timbul karena medan magnet yang berputar memotong kumparan stator yang terpisah secara elektrik sebesar 120° dimana kumparan stator dirangkai secara Y. Universitas Sumatera Utara 2.3 Motor Induksi Sebagai Generator Induksi Secara umum konstruksi motor induksi sama dengan generator induksi, hanya saja generator induksi memerlukan adanya prime mover sebagai penggerak. Oleh karena itu motor induksi tiga fasa dapat dioperasikan sebagai generator dengan cara memutar rotor pada kecepatan di atas kecepatan medan putar stator, sehingga menghasilkan slip (S) negatif. Untuk menjadikan motor induksi sebagai generator maka mesin ini membutuhkan daya reaktif untuk membangkitkan arus eksitasi. Oleh karena itu mesin induksi dapat beroperasi sebagai generator induksi 17 satu fasa maupun tiga fasa. Gambar 2.7 Rangkaian ekivalen mesin induksi 2.3.1 Slip Slip adalah nilai suatu dari perbedaan antara frekuensi listrik (rotasi dari medan magnet internal dengan frekuensi gerak (rotasi dari rotor) pada mesin listrik. Selisih antara kecepatan rotor dengan kecepatan sinkron disebut slip (S). Slip dapat dinyatakan dalam putaran setiap menit, tetapi lebih umum dinyatakan sebagai persen dari kecepatan sinkron. 𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆 (𝑠𝑠) = 𝑛𝑛 𝑠𝑠 −𝑛𝑛 𝑟𝑟 𝑛𝑛 𝑠𝑠 × 100%.........................................................(2.3) Universitas Sumatera Utara nr = kecepatan rotor ns = kecepatan sinkron Apabila nr<ns, (0 <s< 1), kecepatan dibawah sinkron akan menghasilkan kopel, rotor dijalankan dengan mempercepat rotasi medan magnet, tenaga listrik diubah ke tenaga gerak (putaran). Bilanr= ns, (s = 0), tegangan tidak akan terinduksi dan arus tidak akan mengalir pada kumparan rotor, sehingga tidak akan dihasilkan kopel. Bila nr>ns, (s< 0), kecepatan di atas sinkron, rotor dipaksa berputar lebih cepat daripada medan magnet. Tenaga gerak diubah ke tenaga listrik (daerah generator). 18 Dan bila s = 1, rotor ditahan, tidak ada transfer tenaga. Sedangkan s> 1, kecepatan terbalik, rotor dipaksa bekerja melawan medan magnet (daerah pengereman). 2.3.2 Frekuensi Rotor Ketika rotor masih dalam keadaan diam, dimana frekuensi arus pada rotor sama seperti frekuensi masukan (sumber). Tetapi ketika rotor akan berputar, maka frekuensi rotor akan bergantung kepada kecepatan relatif atau bergantung tergantung besarnya slip. Untuk besar slip tertentu, maka frekuensi rotor sebesar f’ yaitu : 𝑛𝑛𝑠𝑠 − 𝑛𝑛𝑟𝑟 = 120𝑓𝑓′ 𝑃𝑃 , diketahui bahwa 𝑛𝑛𝑠𝑠 = 120𝑓𝑓 𝑃𝑃 Dengan membagikan dengan salah satu, maka didapatkan : 𝑓𝑓′ 𝑓𝑓 = 𝑛𝑛 𝑠𝑠 −𝑛𝑛 𝑟𝑟 𝑛𝑛 𝑠𝑠 = 𝑠𝑠 Maka f’ = sf (Hz).................................................................................(2.5) Universitas Sumatera Utara Telah diketahui bahwa arus rotor bergantung terhadap frekuensi rotor f’ = sf dan ketika arus ini mengalir pada masing -masing fasa di belitan rotor, akan memberikan reaksi medan magnet. Biasanya medan magnet pada rotor akan menghasilkan medan magnet yang berputar yang besarnya bergantung atau relatif terhadap putaran rotor sebesar sns. Pada keadaan tertentu, arus rotor dan arus stator menghasilkan distribusi medan magnet yang sinusoidal dimana magnet ini memilik magnitud yang konstan dan kecepatan medan putar nsyang konstan. Kedua hal ini merupakan 19 medan magnetik yang berputar secara sinkron. Kenyataannya tidak seperti ini karena pada stator akan ada arus magnetisasi pada kumparannya. 2.3.3 Syarat – Syarat Motor Induksi Sebagai Generator Motor induksi tiga fasa dapat dioperasikan sebagai generator dengan cara memutar rotor pada kecepatan di atas kecepatan medan putar (nr>ns) dan atau mesin bekerja pada slip negatif (s <0). 𝑛𝑛𝑠𝑠 = 120𝑓𝑓 𝑃𝑃 ....................................................................................(2.2) Dengan ns : Kecepatan medan putar (rpm) f : Frekuensi sumber daya (Hz) P : Jumlah kutub motor induksi Sehingga ; 𝑠𝑠 = 𝑛𝑛 𝑠𝑠 −𝑛𝑛 𝑟𝑟 𝑛𝑛 𝑠𝑠 × 100%, 𝑛𝑛𝑟𝑟 > 𝑛𝑛𝑠𝑠 ...............................................................(2.6) Universitas Sumatera Utara Dengan s : slip ns : kecepatan medan putar stator (rpm) nr : kecepatan putar rotor (rpm) 2.4 Rangkaian Penyearah Gelombang Penuh Fungsi penyearah atau rectifier didalam rangkaian catu daya adalah untuk mengubah tegangan listrik bolak balik menjadi tegangan listrik arus searah [5]. Pada masalah ini akan dibahas penyearah gelombang penuh tiga fasa untuk 20 mengkonversi tegangan bolak balik yang diperoleh saat pengereman regeneratif menjadi tegangan searah. Penyearah gelombang penuh tiga fasa merupakan kombinasi dari tiga penyearah gelombang penuh yang bekerja secara bergantian untuk setiap setengah gelombang dari gelombang masukan. Penelitian ini menggunakan penyearah gelombang penuh dengan 6 dioda untuk mengkonversi tegangan bolak - balik yang diperoleh dari energi kinetik sisa saat pengereman menjadi tegangan searah. Skema rangkaian penyearah tiga fasa gelombang penuh dapat dilihat pada gambar 2.8 berikut. D1 D3 D5 D2 D4 D6 Universitas Sumatera Utara Gambar 2.8 Rangkaian penyearah gelombang penuh dengan 6 dioda Prinsip kerja dari penyearah gelombang penuh dengan 6 dioda diatas sama dengan prinsip kerja penyearah dengan 2 atau 4 dioda.Keluaran yang berdenyut yang dihasilkan oleh penyearah, hanya sesuai untuk beberapa pemakaian. Tetapi dalam banyak hal, denyut tersebut harus dikurangi dengan menggunakan rangkaian penapis (filter). Rangkaian penapis ialah gabungan dari kumparan induktansi dan kapasitor yang dirangkai sedemikian rupa sehingga energi yang berdenyut disimpan secara bergantian didalam kumparan dan kapasitor, sehingga 21 arus yang mengalir dari penyearah lebih rata. Gambar 2.9 Rangkaian filter yang digunakan untuk mengurangi denyut keluaran penyearah 2.5 Mikrokontroler ATMega8 Mikrokontroler adalah komputer mikro dalam satu chip tunggal. Mikrokontroler memadukan CPU, ROM, RWM, I/O paralel, I/O seri, counter time, dan rangkaian clock dalam satu chip. Mikrokontroler pada umumnya digunakan sebagai pengontrol kerja dari suatu sistem seperti kerja mesin dan peralatan elektronik. Salah satu jenis mikrokontroler yang paling sering digunakan adalah jenis AVR (Alv and Vegard’s Risc) 8 bit. Universitas Sumatera Utara Atmega8 termasuk mikrokontroler dengan lebar jalur data 8 bit, hemat energi dan memiliki kinerja tinggi (1 mega instruksi per detik). Kecepatan clocknya dapat mencapai 16MHz. Memori untuk menyimpan program (PEROM) berkapasitas 8 kilobyte. Memori untuk menyimpan data sementara (SRAM) berkapasitas 1 kilobyte. Adapun memori untuk menyimpan data permanen (EEPROM) berkapasitas 512 byte. Memori PEROM dapat dihapus tulis hingga 10.000 kali sedangkan memori EEPROM hingga 100.000 kali. Mikrokontroler ATMega 8 terdiri dari 3 port utama yaitu PORTB, PORTC, PORTD dengan total pin input/output 23 pin. Port ini digunakan sebagai 22 input/output digital. Adapun fungsi dari tiap pin adalah sebagai berikut : • ICP1, berfungsi sebagai timer counter 1 capture pin. • OC1A, OC1B, OC2, difungsikan sebagai keluaran PWM (pulse width modulation). • MOSI, MISO, SCK, SS, berfungsi sebagai jalur pemrograman serial. • TOSC2, difungsikan sebagai sumber clock eksternal untuk timer. • XTAL1, XTAL2, merupakan sumber clock utama mikrokontroler. • ADC6 channel digunakan untuk mengubah input tegangan analog menjadi data digital. • I2C digunakan untuk komunikasi dengan sensor atau device lain yang memiliki komunikasi data. • RESET digunakan untuk merestart program. Universitas Sumatera Utara • USART berfungsi untuk mengirimkan data serial (TXD) dan untuk menerima data serial (RXD). • Interupt berfungsi sebagai interupsi hardware. • XCX dapat digunakan sebagai sumber clock eksternal untuk USART. • T0 dan T1 berfungsi sebagai masukan counter eksternal untuk timer 1 dan timer 0. • AIN0 dan AIN1 berfungsi sebagai masukan input untuk analog comparator. 23 • VCC berfungsi sebagai pin untuk sumber catu daya. • GND berfungsi sebagai grounding dari komponen. • AVCC merupakan pin untuk masukan tegangan ADC. • AREF merupakan input untuk tegangan referensi ADC. Diagram pin – pin Atmega8 model PDIP dtunjukkan dalam gambar 2.10 [6]. Universitas Sumatera Utara Gambar 2.10Susunan penampang pin ATMega8 Dalam aplikasinya tidak semua pin pada ATMega8 digunakan sebagai kontroler. Hal ini dikarenakan pada dasarnya port B, C dan D dapat digunakan sebagai media input dan output. Port yang digunakan pada pengereman regeneratif antara lain : Port C6 (pin 1) : Port ini digunakan untuk me-reset atau mengatur ulang kembali program pada ATMega8 ke kondisi semula.sehingga intruksi akan dieksekusi dari 24 awal program. Port D2 (pin 4) : Port ini digunakan untuk memberi instruksi mengizinkan program menjalankan eksekusi instruksi berikutnya apabila instruksi sebelumnya telah selesai dieksekusi. Port B6 dan B7 : Port ini digunakan sebagai clock eksternal. Dengan menambahkan komponen kristal dan kapasitor maka clock pada ATMega8 dapat diatur guna mempercepat eksekusi perintah pada program. Universitas Sumatera Utara Port B1 : Port ini digunakan untuk mengatur tegangan DC yang akan diinput ke rotor melalui transistor. Port B3, B4 dan B5 : Port ini gunakan sebagai input penulisan baris program pada ATMega8. Port B5 dan Port AVCC : Port ini digunakan sebagai kontrol switching rele. Port C1, C2 dan D0 : Port ini digunakan untuk menampilkan parameter yang diukur melalui LCD Port VCC : Port ini digunakan sebagai sumber catu daya pada ATMega8 Port GND : Port ini digunakan sebagai grounding dari tiap komponen pada ATMega8 2.6 Prinsip Kerja Peralatan Peralatan dalam penelitian ini teridiri dari beberapa bagian utama yaitu : 25 1. Controller, bagian ini berfungsi sebagai pengatur sistem kerja dari peralatan. Controller yang digunakan pada peralatan penelitian ini adalah microcontroller ATMega 8. Bagian ini akan mengatur bagaimana pengereman dan penyearahan bekerja secara berurutan. Agar bekerja sesuai dengan kebutuhan maka microcontroller ATMega 8 harus diinput baris – baris program yang sesuai dengan kerja peralatan yang diinginkan. 2. Penyearah gelombang penuh tiga fasa, bagian ini berfungsi untuk menyearahkan tegangan ac menjadi tegangan dc pada saat pengereman terjadi. Universitas Sumatera Utara 3. DC Chopper, bagian ini mengatur jumlah arus DC yang akan dialirkan untuk mengatur putaran rotor. 4. Rele, bagian ini berfungsi sebagai pemutus hubungan motor induksi tiga fasa dengan sumber tegangan tiga fasa. Sistem bekerja dimulai pada saat motor induksi tiga fasa dihubungkan dengan sumber tegangan tiga fasa. Arus sinusoidal akan mengalir pada kumparan stator sehingga timbul medan magnet putar pada kumparan stator dengan kecepatan putar ns. Medan magnet putar ini akan memotong kumparan jangkar rotor. Medan magnet ini akan menginduksikan tegangan (ggl) sebesar E. Karena rotor adalah rangkaian tertutup maka arus akan mengalir pada kumparan jangkar. Arus pada kumparan jangkar akan berinteraksi dengan medan magnet stator menghasilkan gaya mekanik yang akan memutar rotor. Motor dibiarkan berputar hingga mencapai putaran nominalnya. Durasi waktu motor berputar diatur oleh mikrokontroler ATMega 8. Sesaat setelah durasi kerja motor maka mikrokontroler ATMega 8 akan meng-energize rele sehingga terminal stator motor akan terputus hubungannya dari sumber tegangan tiga fasa. 26 Pada saat yang bersamaan mikrokontroler mengatur dc chopper untuk menginjeksikan arus dc ke rotor motor. Pada kondisi ini rotor dalam keadaan masih berputar untuk beberapa saat hingga akhirnya berhenti. Beberapa saat sebelum berhenti motor akan bekerja sebagai generator. Sesuai dengan prinsip kerja generator, apabila kumparan yang dialiri arus listrik diputar dalam medan magnet maka akan timbul tegangan induksi. Rotor yang berputar pada medan magnet stator akan menhasilkan tegangan induksi Universitas Sumatera Utara bolak balik pada kumparan stator. Ketika pengereman terjadi terminal stator terhubung dengan rangkaian penyearah tiga fasa gelombang penuh.Sehingga tegangan bolak balik yang dihasilkan pada kumparan stator akan disearahkan menjadi tegangan searah. Demikianlah peralatan ini memanfaatkan energi kinetik putaran rotor saat pengereman, digunakan seolah - olah sebagai penggerak mula untuk memutar rotor. Rotor yang dialiri arus listrik akan berputar dalam medan magnet stator untuk beberapa saat sehingga motor induksi tiga fasa akan berubah fungsi menjadi generator dan menyuplai tegangan. Sehingga model pengereman ini disebut sebagai pengereman regeneratif. 27 Universitas Sumatera Utara