inverter six-step - Teknik Elektro UNIB
advertisement

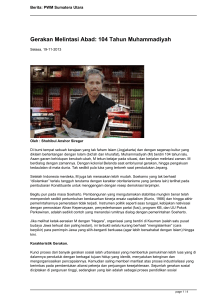
I. Voltage Source Inverter (VSI) A. Six-Step VSI B. Pulse-Width Modulated VSI II. Metode PWM A. Sinusoidal PWM B. Hysteresis (Bang-bang) C. Space Vector PWM 2 /35 ¾Voltage Source Inverter Tiga Fasa Six Step Gambar 1 Three Three-phase phase voltage source inverter. inverter 3 /35 ¾ Sinyal y g gate,, urutan switching g dan tegangan g g line ke negatif. g 4 /35 Voltage Source Inverter (VSI) Six-Step VSI ¾ Urutan Switching: 561 (V1) → 612 (V2) → 123 (V3) → 234 (V4) → 345 (V5) → 456 (V6) → 561 (V1) dimana, 561 berarti S5, S6 and S1 di-ON-kan sedangkan switch lainnya OFF 5 Voltage Source Inverter (VSI) Six-Step VSI ¾ Tegangan g g line-to-line ((Vab, Vbc, Vca) dan tegangan g g line-to-neutral ((Van, Vbn, Vcn) Tegangan line-to-line Ö Vabb = VaNN - VbN Ö Vbc = VbN - VcN Ö Vca = VcN - VaN Tegangan fasa Ö Van = 2/3VaN - 1/3VbN - 1/3VcN Ö Vbn = -1/3VaN + 2/3VbN - 1/3VcN Ö Vcn = -1/3VaN - 1/3VbN + 2/3VcN 6 Voltage Source Inverter (VSI) Six-Step VSI ¾ Amplitud p tegangan g g line to line ((Vab, Vbc, Vca) Komponen frekuensi fundamental (Vab)1 (Vab )1 (rms) = 3 4 Vdc 6 = Vdc ≈ 0.78Vdc π 2π 2 Komponen frekuensi harmonik (Vab)h : amplitud harmonik menurun dengan naiknya orde harmoniknya 0.78 (Vab )h (rms) = Vdc h di dimana, h = 6n 6 ± 1 (n ( = 1, 1 2, 2 3,.....) 3 ) 7 Voltage Source Inverter (VSI) Six-Step VSI ¾ Karakteristik VSI Six Step p Disebut “inverter six-step” karena adanya enam step pada bentuk gelombang tegangan line-to-netral (fasa) nya. Harmonik H ik orde d 3 dan d kelipatan k li t 3 tidak tid k muncull pada d tegangan t li line-tot line dan line-to-neutral. Konsekuensinya juga tidak muncul pada arusnya. Amplitud output inverter tiga fasa dapat dikontrol hanya dengan mengubah tegangan DC-link nya (Vdc). 8 ¾ Sasaran PWM Mengontrol tegangan output inverter Mengurangi harmonik ¾ Kekurangan dari PWM Rugi-rugi R i i switching it hi naik ik karena k f k frekuensi i PWM yang tinggi ti i Tegangan output menjadi berkurang Problem interferensi elektromagnetik (EMI) disebabkan harmonik orde tinggi 9 /35 ¾ Pulse-Width Pulse Width Modulation (PWM) 10 /35 ¾ Tegangan output inverter Jika vcontrol > vtri, VA0 = Vdc/2 Jika vcontrol < vtri, VA0 = -Vdc/2 ¾ Kontrol tegangan output inverter Frekuensi PWM sama dengan frekuensi vtri Amplitud p dikontrol oleh harga g p puncak vcontrol Frekuensi fundamental dikontrol oleh frekuensi vcontrol ¾ Indeks modulasi (m) vcontrol puncak (V A0 )1 ∴m = , = vtri Vdc / 2 dimana, (VA0 )1 : komponen frekuensi fundamental dari VA0 11 /35 Sinusoidal PWM Hysteresis Band PWM yste es s a d Space Vector PWM p /35 ¾ Three-phase Three phase inverter 12 /35 g ¾ Bentuk Gelombang vtri Frekuensi vtri dan vcontrol Ö frekuensi vtri = fs Ö frekuensi vcontrol = f1 dimana, fs = frekuensi PWM f1 = frekuensi fundamental Tegangan output inverter Ö jika vcontrol > vtri, VA0 = Vdc/2 Ö jika vcontrol < vtri, VA0 = -Vdc/2 dimana, VAB = VA0 – VB0 VBC = VB0 – VC0 VCA = VC0 – VA0 /35 vcontrol_A vcontrol_B vcontrol_C ¾ Rasio Modulasi Amplitud (ma) amplitud puncak vcontrol nilai puncak (V A0 )1 ∴ ma = , = amplitud vtri Vdc / 2 dimana, (VA0 )1 : komponen frekuensi fundamental VA0 ¾ Rasio modulasi frekuensi (mf) fs m f = , dimana,, f s = frekuensi PWM dan f1 = frekuensi fundamental f1 mf seharusnya bilangan bulat ganjil Ö Jika mf bukan bilangan bulat, bulat mungkin ada subharmonik pada output tegangan Ö Jika mf bukan ganjil, komponen DC masih ada dan harmonik pada tegangan output mf seharusnya adalah kelipatan 3 untuk inverter PWM 3 fasa Ö Harmonik kelipatan 3 ganjil dan harmonik genap dihilangkan 14 /35 ¾ Inverter Tiga fasa untuk Kontrol Arus Hysteresis 15 /35 ¾ Kontroler arus Hysteresis 16 /35 ¾ Karakteristik Kontrol Arus Hysteresis Keunggulan Ö Respon R di dinamik ik yang sangatt baik b ik ÖBiaya rendah dan mudah diterapkan Kelemahan Ö Riak arus yang besar pada steady-state Ö Variasi pada frekuensi switching Ö Tidak ada inter-komunikasi antara masing-masing kontroler histerisis dari ketiga fasa, dan akibatnya tidak ada cara untuk membangkitkan vektor tegangan nol. Hasilnya, frekuensi switching bertambah pada indeks modulasi yang lebih rendah dan sinyal akan melewati pita histeresis setiap kali vektor nol ON. Ö Proses modulasi membangkitkan komponen sub-harmonik. 17 /35 ¾ Tegangan outpur inverter tiga fasa (1) dimana, transistor atas: S1, S3, S5 transistors bawah: S4, S6, S2 vektor variabel switching: a, b, c 18 /35 ¾ Tegangan output S1 sampai S6 adalah 6 transistor yang membentuk tegangan output Pada P d saatt sakelar k l atas t ON, ON sakelar k l bawah b h pada d kaki k ki yang harus h sama OFF Ö Menghasilkan 8 kombinasi pola ON-OFF bagi transistor-transistor atas (S1, S3, S5) Vektor tegangan line-to-line [Vab Vbc Vca]t ⎡ Vab ⎤ ⎡1 − 1 0 ⎤ ⎡ a ⎤ ⎢ V ⎥ = V ⎢ 0 1 − 1⎥ ⎢ b ⎥ , dc ⎢ ⎢ bc ⎥ ⎥⎢ ⎥ ⎣⎢ − 1 0 1⎦⎥ ⎢⎣ c ⎥⎦ ⎣⎢ Vca ⎦⎥ dimana vektor variabel switching Vetor V t tegangan t li line-to-netral t t l (tegangan (t f fasa) ) [Van Vbn Vcn]t ⎡Van ⎤ ⎡2 −1 −1⎤ ⎡a ⎤ ⎢ ⎥ 1 ⎢ ⎥⎢ ⎥ V 1 2 1 = − − V bn dc ⎢ ⎥ 3 ⎢ ⎥ ⎢b⎥ ⎢⎣Vcn ⎥⎦ ⎢⎣−1 −1 2⎦⎥ ⎣⎢c ⎥⎦ 19 /35 [a b c] t ¾ Tegangan output 8 vektor tegangangan inverter (V0 to V7) 20 /35 8 kombinasi, tegangan fasa dan tegangan line output 21 /35 ¾ Prinsip Space Vector PWM Memperlakukan tegangan sinusoidal sebagai sebuah vektor amplitud konstan yang berputar pada frekuensi konstan Teknik PWM ini memperkirakan tegangan referensi Vref lewat kombinasi kedelapan pola switching (V0 - V7) d-q q stasioner) Perubahan Koordinat (kerangka referensi abc menjadi kerangka d : Vektor tegangan tiga fasa ditransformasikan menjadi vektor pada kerangka koordinat d-q stasioner yang mewakili penjumlahan vektor ruang dari ketiga tegangan fasa Vektor-vektor (V1 - V6) membagi bidang menjadi 6 sektor (masing-masing 60 derajat) Vref dibangkitkan oleh dua vektor bukan nol yang berdekatan dan dua vektor nol 22 /35 ¾ Dasar D vektor kt dan d sektor kt switching it hi 6 vektor aktif (V1,V2, V3, V4, V5, V6) Ö Sumbu heksagonal Ö Tegangan DC link disuplay ke beban Ö Masing-masing sektor (1 - 6): 60 derajat 2 vektor nol (V0, V7) Ö Pada titik asal Ö Tidak ada tegangan yang disuplay ke beban 23 /35 ¾ Perbandingan Sinusoidal PWM dan Space Vector PWM Gambar. Perbandingan lokus tegangan kontrol linier maksimum pada SPWM dan SVPWM 24 /35 ¾ Perbandingan Sinusoidal PWM dan Space Vector PWM Space Vector PWM membangkitkan distorsi harmonik lebih sedikit pada output tegangan atau arus dibanding sinusoidal PWM Space Vector PWM menghasilkan penggunaan tegangan suplay yang lebih efisien dibanding sinuosoidal PWM Ö Sinusoidal PWM : Lokus vektor referensi berada di dalam lingkaran dengan radius 1/2 Vdc Ö Space Vector PWM : Lokus vektor referensi berada di dalam lingkaran dengan radius 1/√3 Vdc ∴ Utilisasi tegangan: Space Vector PWM = 2/√3 kali Sinusoidal PWM 25 /35 ¾ Penerapan Space Vector P S V t PWM Langkah 1. 1 Tentukan Vd, Vq, Vref, dan sudut (α) Langkah 2. Tentukan durasi waktu T1, T2, T0 Langkah 3. Tentukan waktu switching masing-masing transistor (S1 to S6) 26 /35 ¾ Langkah 1. Menentukan Vd, Vq, Vref, dan sudut (α) Vd = Van − Vbn ⋅ cos60 − Vcn ⋅ cos60 Transformasi koordinat : abc Æ dq 1 1 = Van − Vbn − Vcn 2 2 Vq = 0 + Vbn ⋅ cos30 − Vcn ⋅ cos30 = Van + 3 3 Vbn − Vcn 2 2 1 1 ⎤ V ⎡ ⎡ an ⎤ 1 − − ⎥ ⎡Vd ⎤ 2 ⎢ 2 2 ⎢ ⎥ ⎥ ⎢Vbn ⎥ ∴⎢ ⎥ = ⎢ V ⎣ q ⎦ 3 ⎢0 3 − 3 ⎥ ⎢V ⎥ cn ⎢⎣ 2 2 ⎥⎦ ⎣ ⎦ V ref = Vd 2 + Vq 2 −1 Gambar: Vektor ruang tegangan dan komponennya dalam (d, q). 27 /35 α = tan ( Vq Vd ) = ω s t = 2ππs t (dimana, f s = frekuensi fundamenta l) ¾ Step 2. 2 Menentukan durasi waktu T1, T2, T0 (1) Gambar. Vektor referensi sebagai kombinasi vektor-vektor berdekatan pada sektor 1. 28 /35 p 2. Menentukan durasi waktu T1, T2, T0 ¾ Step durasi waktu switching pada sektor 1 Tz T1 T1 + T2 Tz 0 0 T1 T1 + T2 ∫ V ref = ∫ V1dt + ∫ V 2dt + ∫ V 0 ∴ Tz ⋅ V ref = (T1 ⋅ V1 + T2 ⋅ V 2 ) ⎡cos (α ) ⎤ ⎡1 ⎤ ⎡cos (π / 3) ⎤ 2 2 V T V T = ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ ⇒ Tz ⋅ V ref ⋅ ⎢ 1 dc ⎢ ⎥ 2 dc ⎢ ⎥ ⎥ sin ( ) 0 sin ( / 3 ) α π 3 3 ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (dimana 0 ≤ α ≤ 60°) (dimana, ∴T1 = Tz ⋅ a ⋅ sin (π / 3 − α ) sin (π / 3) ∴T2 = Tz ⋅ a ⋅ ⎛ ⎜ 1 ∴T0 = Tz − (T1 + T2 ), ⎜ where, Tz = fs ⎜ ⎜ ⎝ 29 /35 sin (α ) sin (π / 3) ⎞ Vref ⎟ ⎟ and a = 2 Vdc ⎟⎟ 3 ⎠ ¾ Langkah 2. Menentukan durasi waktu T1, T2, T0 Durasi waktu switching pada setiap sektor 3 ⋅ Tz ⋅ V ref ⎛ ⎛ π n −1 ⎞⎞ π ⎟ ⎟⎟ ⎜⎜ sin ⎜ − α + ∴ T1 = Vdc 3 3 ⎠⎠ ⎝ ⎝ 3 ⋅ Tz ⋅ V reff ⎛ 3 ⋅ Tz ⋅ V reff ⎛ n n n ⎞ ⎞ sin = π − α = sin π cos α − cos π sin α ⎟ ⎟ ⎜ ⎜ Vdc Vdc 3 3 3 ⎠ ⎝ ⎝ ⎠ 3 ⋅ Tz ⋅ V ref ⎛ ⎛ 3 ⋅ Tz V ref ⎛ n −1 n −1 ⎞ n −1 ⎞⎞ π ⎟ ⎟⎟ = α π α π⎟ − ⋅ + ⋅ ⎜⎜ sin ⎜ α − ∴ T2 = cos sin sin cos ⎜ Vdc Vdc 3 3 3 ⎠ ⎝ ⎠⎠ ⎝ ⎝ ⎛ dimana, n = 1 sampai 6 (sektor1 sampai 6) ⎞ ⎟⎟ ∴ T0 = Tz − T1 − T2 , ⎜⎜ 0 ≤ α ≤ 60 ° ⎝ ⎠ 30 /35 ¾ Langkah 3. Menentukan waktu switching masing masing transistor (S1 - S6) masing-masing (a) Sektor 1. (b) Sektor 2. Gambar. Pola switching space Vector PWM pada tiap sektor 31 /35 ¾ Langkah L k h 3. 3 Menentukan M t k waktu kt switching it hi masing-masing i i transistor t i t (S1 - S6) (c) Sektor 3. (d) Sektor 4. Gambar. Pola switching space Vector PWM pada tiap sektor 32 /35 ¾ Langkah L k h 3. 3 Menentukan M t k waktu kt switching it hi masing-masing i i transistor t i t (S1 - S6) (e) Sektor 5. (f) Sektor 6. Gambar. Pola switching space Vector PWM pada tiap sektor 33 /35 ¾ Langkah 3. 3 Menentukan waktu switching masing-masing transistor (S1 - S6) 34 /35 Tabel waktu switching pada tiap sektor [1] N. Mohan, W W. P P. Robbin Robbin, and T T. Undeland Undeland, Power Electronics: Converters, N Mohan Converters Applications, and Design, 2nd ed. New York: Wiley, 1995. [2] B B. K K. Bose Bose, Power Electronics and Variable Frequency Drives:Technology and Applications. IEEE Press, 1997. [3] H.W. H W van der d Broeck, B k H.-C. H C Skudelny, Sk d l and dG G.V. V St Stanke, k “A “Analysis l i and d realization of a pulsewidth modulator based on voltage space vectors,” IEEE Transactions on Industry Applications, vol.24, pp. 142-150, 1988. 35 /35