BERBANTUKAN LIGHT DEPENDENT RESISTOR
advertisement

PENGGUNAAN FILM LITIUM TANTALAT (LiTaO 3 )
BERBANTUKAN LIGHT DEPENDENT RESISTOR (LDR)
SEBAGAI DETEKTOR GARIS PADA ROBOT PENGIKUT
GARIS BERBASIS MICROCONTROLLER AVR ATMEGA16
ARI WIDJONARKO
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
BOGOR
2013
ABSTRAK
ARI WIDJONARKO. Penggunaan Film Litium Tantalat (LiTaO 3 ) Berbantukan Light
Dependent Resistor (LDR) sebagai Detektor Garis pada Robot Pengikut Garis Berbasis
Microcontroller AVR Atmega16. Dibimbing oleh IRZAMAN dan HERIYANTO
SYAFUTRA.
Telah dilakukan pembuatan robot pengikut garis dengan menggunakan film Litium
Tantalat (LiTaO 3 ) sebagai detektor garisnya. Film LiTaO 3 mengalami perubahan
konduktivitas listrik ketika dikenai gelombang inframerah. Konduktivitas listriknya
meningkat dengan meningkatnya intensitas gelombang inframerah yang jatuh pada
permukaan film. Sebagai pengendali robot, digunakan microcontroller AVR Atmega16.
Microcontroller memberikan instruksi kepada kedua motor sebagai respon terhadap
masukan. Masukan pada microcontroller berupa perubahan tegangan jatuh pada film
akibat perubahan intensitas inframerah yang sebelumnya telah dikuatkan dengan
menggunakan rangkaian penguat operasional. Sebelum diterapkan sebagai detektor garis,
film diuji dengan variasi warna transmitter dan jarak bidang pantul. Film LiTaO 3
memiliki daerah serapan pada panjang gelombang cahaya tampak dan inframerah. Robot
pada penelitian ini menggunakan dua sampel film, yaitu film yang diproses annealing
pada suhu 800oC selama 1 jam dan film yang diproses annealing pada suhu 800oC selama
8 jam karena memiliki karakteristik yang baik untuk diterapkan sebagai sensor detektor
garis serta menggunakan sebuah LDR untuk menjaga stabilitas robot. Sebagai transmitter
digunakan LED inframerah, karena film menghasilkan beda tegangan jatuh tertinggi
antara kondisi gelap dan terang ketika disinari dengan LED inframerah.
Kata Kunci: LiTaO 3 , inframerah, detektor garis, microcontroller, rangkaian op-amp.
PENGGUNAAN FILM LITIUM TANTALAT (LiTaO 3 )
BERBANTUKAN LIGHT DEPENDENT RESISTOR (LDR)
SEBAGAI DETEKTOR GARIS PADA ROBOT PENGIKUT
GARIS BERBASIS MICROCONTROLLER AVR ATMEGA16
ARI WIDJONARKO
Skripsi
sebagai salah satu syarat untuk memperoleh gelar
Sarjana Sains pada
Departemen Fisika
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
BOGOR
2013
Judul
: Penggunaan Film Litium Tantalat (LiTaO 3 ) Berbantukan Light Dependent
Resistor (LDR) sebagai Detektor Garis pada Robot Pengikut Garis Berbasis
Microcontroller AVR Atmega16
Nama : Ari Widjonarko
NIM
: G74080039
Departemen Fisika Institut Pertanian Bogor
Disetujui
Dr. Ir. Irzaman, M.Si.
Pembimbing I
Heriyanto Syafutra, S.Si, M.Si.
Pembimbing II
Diketahui
Dr. Akhiruddin Maddu, M.Si.
Ketua Departemen
Tanggal lulus:
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Allah Bapa di Surga yang telah melimpahkan
berkat dan karunia-Nya kepada penulis sehingga dapat menyelesaikan laporan penelitian
yang berjudul ”Penggunaan Film Litium Tantalat (LiTaO 3 ) Berbantukan Light
Dependent Resistor (LDR) sebagai Detektor Garis pada Robot Pengikut Garis Berbasis
Microcontroller AVR Atmega16”. Skripsi ini disusun penulis sebagai salah satu syarat
kelulusan program sarjana di Departemen Fisika Fakultas Matematika dan Ilmu
Pengetahuan Alam Institut Pertanian Bogor. Skripsi ini juga diharapkan dapat menjadi
sumbangan pemikiran yang nantinya dapat terus dikembangkan khususnya bagi
perkembangan teknologi di Indonesia pada masa yang akan datang. Atas
terselesaikannya skripsi ini, penulis ingin mengucapkan terimakasih kepada:
1. Bapak Sardiyanto dan Ibu Margaretha Suwanti serta saudara-saudara penulis
Stefanus Tika, Christina Endah, Albertus Trisno, Aris Sanyoto, Suharmi, dan
seluruh keluarga besar Titus Samsidi yang selalu memberikan doa, motivasi
kepada penulis, dan bantuan biaya selama penulis mengemban pendidikan
sarjana.
2. Bapak Dr. Ir. Irzaman, M.Si. dan Heriyanto Syafutra, S.Si, M.Si. selaku
pembimbing skripsi atas segala nasehat dan bimbingan yang diberikan kepada
penulis.
3. Bapak Jajang Juansah, M.Si. sebagai penguji yang telah bersedia menyempatkan
waktunya dan memberikan masukan kepada penulis.
4. Bapak Ir. Hanedi Darmasetiawan, MS. atas revisi dan masukan dalam penulisan
skripsi ini.
5. Anggi Maniur, Roynizar, Uwie Hardiyanti, Fery Nurdin, Epa, Bambang sahabat
seperjuangan di departemen fisika tercinta dalam belajar kelompok serta telah
banyak memberi motivasi dan penghiburan bagi penulis.
6. Martinus Surya, Bruder Tamada, Vinsen, Mona, Stevanus Budi yang telah
banyak memberi motivasi, hiburan, dan sharing.
7. Keluarga Puella Domini Choir IPB. Di sini penulis dapat mengembangkan
talenta dan lebih mendekatkan diri dengan Tuhan serta memperoleh motivasi
dan penghiburan.
8. Rekan-rekan tim robotika D’Razor (Fery dan Rady) teman seperjuangan dalam
lomba robotika nasional.
Semoga skripsi ini dapat berguna bagi kita semua. Namun karena keterbatasan
penulis sehingga membuat penulis merasa perlu kritik dan saran dari rekan-rekan demi
perbaikan selanjutnya. Terima kasih.
Bogor, Januari 2013
Penulis
RIWAYAT HIDUP
Penulis dilahirkan di Jakarta, 23 Februari 1990 dari pasangan
Sardiyanto dan Margaretha Suwanti. Penulis menyelesaikan
pendidikan Taman Kanak-kanak hingga Sekolah Menengah
Pertama di Klaten, Jawa Tengah yaitu TK Kanisius Delanggu,
SDN 2 Ngreden, dan SMPN 3 Delanggu. Penulis menyelesaikan
Sekolah Menengah Atas di Jakarta yaitu SMAN 59 Jakarta. Penulis
melanjutkan pendidikan ke jenjang perkuliahan di Departemen
Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Institut
Pertanian Bogor melalui jalur Undangan Seleksi Masuk IPB
(USMI). Selama kuliah, penulis aktif di organisasi Keluarga Mahasiswa Katolik IPB
sebagai pengurus Divisi Kerohanian (2008-2010), di acara kepanitiaan Santa Claus Day
sebagai anggota Sie Dokumentasi (2008), acara kepanitian Reuni Akbar Alumni
Keluarga Mahasiswa Katolik IPB yang diselenggarakan di IPB International Convention
Center sebagai Penanggungjawab Stand Kewirausahaan (2008), dan acara kepanitiaan
Paskahan Bersama Mahasiswa Katolik Se-Keuskupan Bogor sebagai Penanggungjawab
Divisi Liturgi (2009).
Selama menjadi mahasiswa, penulis juga memiliki prestasi non-akademik
diantaranya Juara I bersama Puella Domini Choir IPB dalam Festival Paduan Suara
Gerejawi (FESPARAWI) antar Mahasiswa Katolik se-Jabodetabek di Unika Atmajaya
Jakarta (2011), meraih 1 medali perak bersama Vera Laude Choir dalam Magnificat
Choir Competition (2011), dan Finalis lomba robotika tingkat nasional JRC yang
diselenggarakan oleh Mendikbud di ITS, Surabaya (2012).
Selama masa studi di IPB Penulis juga berkesempatan menjadi Asisten Praktikum
Elektronika Dasar (2010-2011), Asisten Praktikum Elektronika Lanjut (2011-2012), dan
Pengajar Fisika di Bimbingan Belajar Mahasiswa Katalis (2010).
DAFTAR ISI
Halaman
DAFTAR TABEL ....................................................................................................vii
DAFTAR GAMBAR ............................................................................................... viii
DAFTAR LAMPIRAN ............................................................................................ix
BAB 1 PENDAHULUAN ...................................................................................... 1
1.1 Latar Belakang ..................................................................................... 1
1.2 Tujuan Penelitian ................................................................................. 1
1.3 Perumusan Masalah ............................................................................. 1
1.4 Hipotesis .............................................................................................. 1
BAB 2 TINJAUAN PUSTAKA ............................................................................. 1
2.1 Litium Tantalat .................................................................................... 1
2.2 Microcontroller ....................................................................................2
2.3 Sensor Pendeteksi Garis ...................................................................... 3
2.4 Rangkaian Op-Amp .............................................................................. 4
2.5 Driver Motor DC ................................................................................. 4
BAB 3 METODOLOGI PENELITIAN ................................................................. 5
3.1 Tempat dan Waktu ............................................................................... 5
3.2 Alat dan Bahan .................................................................................... 5
3.3 Prosedur Penelitian .............................................................................. 5
3.3.1
Pemilihan film LiTaO 3 ..............................................................
5
3.3.2 Perancangan simulasi dan pemrograman robot ........................ 5
3.3.3 Pembuatan badan dan rangka robot .......................................... 5
3.3.4 Perancangan rangkaian elektronika .......................................... 6
3.3.4.1 Perancangan sensor pendeteksi garis ......................... 7
3.3.4.2 Perancangan rangkaian regulator ............................... 7
3.3.4.2 Perancangan rangkaian aktuator robot ....................... 7
3.3.5 Pengintegrasian rangkaian robot .............................................. 7
BAB 4 HASIL DAN PEMBAHASAN .................................................................. 7
4.1
Uji Sensitivitas Film LiTaO 3 ................................................................
7
4.2 Rancangan Film LiTaO 3 sebagai Sensor Pendeteksi Garis ................. 9
4.3 Sensitivitas Robot Pengikut garis ........................................................ 16
4.4 Rangkaian Catu Daya .......................................................................... 16
4.5 Rancangan Driver Motor DC .............................................................. 17
4.6 Rangkaian Pengendali Sistem Robot ................................................... 17
4.7 Pengujian Robot ...................................................................................17
BAB 5 KESIMPULAN DAN SARAN .................................................................. 18
5.1 Kesimpulan .......................................................................................... 18
5.2 Saran .................................................................................................... 18
DAFTAR PUSTAKA .............................................................................................. 19
LAMPIRAN .............................................................................................................22
vi
DAFTAR TABEL
Halaman
Tabel 1
Hasil uji sensitivitas LiTaO 3 ....................................................................
7
Tabel 2 Hasil pengujian film pada bidang pantul dengan LED
superbright hijau ..................................................................................... 9
Tabel 3 Hasil pengujian film pada bidang pantul dengan LED
superbright biru ....................................................................................... 10
Tabel 4 Hasil pengujian film pada bidang pantul dengan LED
superbright kuning .................................................................................. 10
Tabel 5 Hasil pengujian film pada bidang pantul dengan LED
superbright putih ..................................................................................... 11
Tabel 6 Hasil pengujian film pada bidang pantul dengan LED
superbright merah ................................................................................... 11
Tabel 7 Hasil pengujian film pada bidang pantul dengan LED
high power inframerah ............................................................................ 12
Tabel 8 Hasil pengujian input pada driver motor dan arah pergerakan
motor ....................................................................................................... 17
Tabel 9 Hasil pengujian fungsional sensor ........................................................... 18
Tabel 10 Hasil pengujian fungsional robot dengan variasi sudut
tikungan ................................................................................................... 19
vii
DAFTAR GAMBAR
Halaman
Gambar 1
Bentuk fisik AVR Atmega16 ............................................................. 2
Gambar 2
Konfigurasi pin Atmega16 ................................................................. 3
Gambar 3
Hubungan antara keluaran sensor fotodioda dan intensitas
cahaya ................................................................................................. 3
Gambar 4
Ilustrasi mekanisme sensor garis ........................................................ 4
Gambar 5
Rangkaian op-amp inverting .............................................................. 4
Gambar 6
Rangkaian op-amp non-inverting ....................................................... 4
Gambar 7
Konfigurasi IC L293D ........................................................................ 5
Gambar 8
Diagram alir penelitian ....................................................................... 6
Gambar 9
Beda tegangan output pada ulangan 1 dan 2 ...................................... 8
Gambar 10 Sensitivitas film LiTaO 3 pada ulangan 1 dan 2 .................................. 9
Gambar 11 Rangkaian uji film LiTaO 3 terhadap tegangan output ........................
9
Gambar 12 Beda tegangan output sampel 2 dengan variasi warna LED dan
jarak bidang pantul ............................................................................. 12
Gambar 13 Beda tegangan output sampel 24 dengan variasi warna LED dan
jarak bidang pantul ............................................................................. 13
Gambar 14 Skema rangkaian penguat operasional Thevenin ............................... 14
Gambar 15 Skema rangkaian komparator ............................................................. 14
Gambar 16 Skema rangkaian robot pengikut garis tanpa transmitter.................... 15
Gambar 17 Ilustrasi sensor garis pada bidang pantul berwarna hitam .................. 16
Gambar 18 Ilustrasi sensor garis pada bidang pantul berwarna putih ................... 16
Gambar 19 Rangkaian catu daya ........................................................................... 16
Gambar 20 Posisi sensor dan arah pergerakan roda pada robot ketika pada
(a) lintasan lurus (b) tikungan ke kiri (c) tikungan ke kanan
(d) lintasan buntu ................................................................................ 19
viii
DAFTAR LAMPIRAN
Halaman
Lampiran 1
Pemrograman robot pengikut garis ................................................... 23
Lampiran 2
Skema rancangan robot pengikut garis secara keseluruhan ..............26
Lampiran 3
Gambar rancangan robot pengikut garis ........................................... 27
Lampiran 4
Perhitungan gain berdasarkan persamaan penguat operasional
Thevenin pada sampel 2 dan 24 ........................................................ 28
ix
1
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Seiring dengan perkembangan jaman,
manusia berlomba-lomba mengembangkan
peralatan dengan sistem otomatis, misalnya
peralatan dengan sistem robot yang dianggap
lebih efisien dalam membantu mengerjakan
tugas-tugas manusia. Salah satu robot yang
dikembangkan adalah robot pengikut garis.
Robot pengikut garis merupakan salah satu
bentuk robot bergerak otonom yang banyak
dirancang baik untuk penelitian, industri
maupun kompetisi robot. Sesuai dengan
namanya, tugas yang harus dilakukan oleh
robot pengikut garis adalah mengikuti garis
pemandu yang dibuat dengan tingkat presisi
tertentu.1 Garis pemandu yang dimaksud
adalah garis berwarna gelap di atas
permukaan yang berwarna terang atau
sebaliknya. Untuk dapat mengikuti garis
lintasan, robot pengikut garis membutuhkan
sebuah sensor.
Litium tantalat (LiTaO 3 ) merupakan
bahan yang sudah digunakan dalam dunia
industri untuk pembuatan sensor inframerah
karena memiliki sifat piroelektrik. Sensor
piroelektrik berbasis LiTaO 3 ini paling peka
terhadap
radiasi
inframerah.
Sensor
piroelektrik berbasis LiTaO 3 dapat beroperasi
pada suhu yang relatif rendah dan suhu ruang.
Selain itu, bahan ini juga memiliki prospek
yang baik untuk pembuatan sensor suhu.
Dalam pembuatan sensor piroelektrik ini
lapisan LiTaO 3 dilapiskan pada substrat
silikon (Si).2
Film LiTaO 3 ini diharapkan dapat
dijadikan sebagai sensor pendeteksi garis pada
robot pengikut garis. Pendeteksi garis ini
bekerja
dengan
menerima
pantulan
gelombang inframerah dari garis pemandu
dimana sumber gelombang inframerah berasal
dari light emitted by diode (LED) inframerah
dengan panjang gelombang 850 nm.
Perbedaan warna garis dan bidang pantul akan
menyebabkan perbedaan besarnya intensitas
gelombang inframerah yang dipantulkan.
Pantulan gelombang inframerah ini akan
diterima oleh film LiTaO 3 dan diubah
menjadi sinyal listrik. Sinyal listrik ini akan
dikuatkan dengan menggunakan rangkaian
penguat operasional (Op-Amp). Sinyal
keluaran dari rangkaian Op-Amp akan menjadi
masukan bagi rangkaian komparator. Sinyal
keluaran dari komparator akan menjadi
masukan bagi microcontroller Atmega16
untuk diolah menjadi gerakan-gerakan robot
pengikut garis.
1.2 Tujuan Penelitian
1. Melakukan
uji
karakteristik
sensitivitas film LiTaO 3 yang telah
tersedia.
2. Membuat prototipe robot pengikut
garis berbasis microcontroller AVR
Atmega16.
3. Menerapkan film LiTaO 3 sebagai
sensor pendeteksi garis pada robot
pengikut garis.
1.3 Perumusan Masalah
Apakah film LiTaO 3 dapat digunakan
sebagai sensor pendeteksi garis pada robot
pengikut garis?
1.4 Hipotesis
Film LiTaO 3 dapat diterapkan sebagai
pendeteksi garis pada robot pengikut garis.
BAB 2
TINJAUAN PUSTAKA
2.1 Litium Tantalat (LiTaO 3 )
Litium tantalat (LiTaO 3 ) merupakan
bahan yang sudah digunakan dalam dunia
industri untuk pembuatan sensor inframerah
karena memiliki sifat piroelektrik yang sangat
baik. Sensor piroelektrik berbasis LiTaO 3 ini
paling peka terhadap radiasi inframerah.
Sensor piroelektrik berbasis LiTaO 3 dapat
beroperasi pada suhu yang relatif rendah dan
suhu ruang. Selain itu, bahan ini juga
memiliki prospek yang baik untuk pembuatan
sensor suhu. Dalam pembuatan sensor
piroelektrik ini lapisan LiTaO 3 dilapiskan
pada substrat silikon (Si). Substrat Si memiliki
konduktivitas termal yang tinggi.2
Film LiTaO 3 dapat dibuat dengan
berbagai metode antara lain chemical vapor
deposition (CVD), liquid phase epitaxy (LPE),
chemical beam epitaxy (MBE), R.F.
sputtering, pulsed laser deposition (PLD), dan
chemical
solution
deposition
(CSD).3
Persamaan reaksi pembentukan bahan film
LiTaO 3 adalah:
2Li(C 2 H 3 O 2 ) + Ta 2 O 5 + 4O 2 →
(2.1)
2LiTaO 3 + 3H 2 O + 4CO 2
2
Film LiTaO 3 yang digunakan pada
penelitian ini, sebelumnya telah dibuat dengan
menggunakan metode CSD. Metode ini
memiliki beberapa keunggulan yaitu memiliki
kontrol stokiometri yang baik, mudah dalam
pembuatan dan sintesisnya dapat dilakukan
pada temperatur yang relatif rendah (70oC).4-5
Metode ini merupakan metode pembuatan
lapisan dengan cara pendeposisian larutan
kimia di permukaan substrat, kemudian diikuti
dengan proses spin coating pada kecepatan
putaran 3000 rpm.6
2.2 Microcontroller
Microcontroller adalah sebuah sistem
komputer fungsional yang dikemas dalam
sebuah chip. Didalamnya terkandung sebuah
inti processor, memori program, RAM, dan
perlengkapan input-output. Microcontroller
juga dapat disebut sebagai pengganti fungsi
komputer dalam pengendalian kerja suatu
sistem.
Microcontroller
biasanya
dikelompokkan dalam satu keluarga, yang
masing-masing microcontroller memiliki
spesifikasi yang berbeda-beda tetapi masih
compatible dalam pemrogramannya.7
Teknologi
microprocessor
telah
mengalami perkembangan. Hal tersebut juga
diikuti
perkembangan
teknologi
microcontroller. Microprocessor terdahulu
menggunakan teknologi CISC seperti
processor Intel 386/486 maka pada
microcontroller produksi ATMEL adalah
jenis MCS (AT89C51, AT89S51, dan
AT89S52).
Setelah
mengalami
perkembangan, teknologi microprocessor dan
microcontroller mengalami peningkatan yang
terjadi pada sekitar tahun 1996 sampai dengan
1998 ATMEL mengeluarkan teknologi
microcontroller terbaru berjenis AVR (alf and
vegard’s risc processor) yang menggunakan
teknologi RISC (reduce instruction set
computer) dengan keunggulan lebih banyak
dibandingkan pendahulunya.8
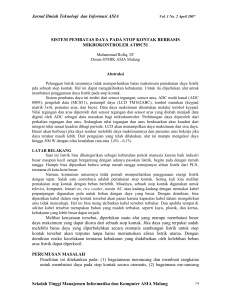
7.
Keluarga AVR (alf and vegard’s
risc processor)
Atmega16 merupakan salah satu
microcontroller 8 bit buatan ATMEL untuk
keluarga AVR. Microcontroller keluarga
AVR menggunakan sistem arsitektur RISC
(reduced instruction set computing) 8 bit.
Pada sistem RISC sebagian besar kode
instruksinya dikemas dalam satu siklus clock.
Bentuk fisik microcontroller AVR Atmega16
ditunjukkan oleh Gambar 1.
Fitur atmega16 yang merupakan
produksi ATMEL yang berjenis AVR adalah
sebagai berikut:
1.
32 saluran I/O yang terdiri atas 4
port (port A, port B, port C, dan
port D) yang masing-masing terdiri
atas 8 bit.
2. ADC (analog to digital converter)
10 bit (8 pin di port A.0 - port A.7)
3. 2 buah timer/counter (8 bit) dan 1
buah timer/counter (16 bit)
4. 4 channel PWM.
5. 6 sleep modes: idle, ADC noise
reduction, power-save, powerdown, standby and extended
standby.
6. Analog comparator dan watchdog
timer dengan osilator internal 1
MHz.
7. Memori 16 Kb flash, 512 byte
SRAM, 512 byte EEPROM.
8. Tegangan operasi 4,5 VDC s.d. 5,5
VDC.
9. 32 jalur I/O yang dapat diprogram.
10. Komunikasi serial menggunakan
port USART dengan kecepatan
maksimal 2,5 Mbps.
11. Pemrograman langsung dari port
paralel komputer.
Jenis IC microcontroller yang sering
digunakan dalam proyek pembuatan aplikasi
kendali adalah microcontroller ATMEL,
microcontroller PIC, microcontroller Maxim,
dan sebagainya.9 Beberapa contoh keluarga
microcontroller:
1.
2.
3.
4.
5.
6.
Keluarga MCS-48
Keluarga MCS-51
Keluarga MC 68HC05
Keluarga MC 68HC08
Keluarga MC 68HC11
Keluarga PIC
Gambar 1 Bentuk fisik AVR atmega16.10
3
dengan latar belakang bidang pantul. Pada
bidang pantul warna gelap terjadi penyerapan
lebih besar daripada bidang pantul warna
terang sehingga intensitas pantulan yang
diterima oleh sensor menjadi lebih kecil.11
Sensor untuk cahaya tampak yang umum
digunakan adalah LDR (light dependent
resistor)
dan
fotodioda
(photodiode),
sedangkan untuk inframerah adalah transistor
cahaya (phototransistor) dan fotodioda
(photodiode). Sensor garis tersebut biasanya
menggunakan sensor fotodioda.1
Gambar 2 Konfigurasi pin AVR atmega16.10
Deskripsi pin pada microcontroller
Atmega16 (Gambar 2):
1. Vcc
: pin masukan
sumber tegangan.
2. Ground
: pin masukan
ground.
3. Port A (P.A0-P.A7) : pin I/O dua
arah dan pin masukan ADC (analog
to digital converter).
4. Port B (P.B0-P.B7) : pin I/O dua
arah dan pin fungsi khusus, yaitu
timer/ counter, analog comparator,
dan
SPI
(serial
peripheral
interface).
5. Port C (P.C0-P.C7) : pin I/O dua
arah dan pin fungsi khusus, yaitu
TWI (two wire serial interface),
analog comparator, dan timer
oscillator.
6. Port D (P.D0-P.D7) : pin I/O dua
arah dan pin fungsi khusus, yaitu
analog
comparator,
interupsi
eksternal, dan komunikasi serial.
7. RESET
: pin untuk
mereset microcontroller.
8. XTAL1
: pin masukan
clock
internal
dan
masukan
inverting
oscillator
amplifier
internal.
9. XTAL2
: pin keluaran
inverting oscillator amplifier.
10. AVCC
: pin masukan
tegangan untuk ADC.
11. AREF
: pin masukan
tegangan referensi ADC.10
Fotodioda merupakan salah satu jenis
sensor
peka
cahaya
(photodetector).
Fotodioda mengalirkan arus yang membentuk
fungsi linier terhadap intensitas cahaya yang
diterima. Arus ini umumnya teratur terhadap
power density (Dp). Perbandingan antara arus
keluaran dengan power density disebut dengan
current responsitivity. Arus yang dimaksud
adalah arus bocor ketika fotodioda tersebut
disinari dan dalam keadaan dipanjar mundur.
Hubungan antara keluaran sensor fotodioda
dengan intensitas cahaya yang diterimanya
ketika dipanjar mundur membentuk suatu
fungsi yang linier.12 Hubungan antara
keluaran sensor fotodioda dengan intensitas
cahaya ditunjukkan pada Gambar 3.
LED pada sensor garis berfungsi sebagai
pengirim cahaya (transmitter) ke garis untuk
dipantulkan lalu dibaca oleh sensor fotodioda
(receiver). Sifat warna permukaan terang
cenderung memantulkan cahaya dan warna
permukaan gelap cenderung menyerap cahaya
digunakan dalam aplikasi ini. Gambar 4
adalah ilustrasi mekanisme sensor garis. Pada
rancangan sensor fotodioda, nilai resistansinya
berkurang bila terkena cahaya. Sumber cahaya
yang digunakan sebagai transmitter biasanya
komponen
ini
LED
superbright,
memancarkan cahaya yang sangat terang,
sehingga cukup untuk mensuplai pantulan
cahaya ke fotodioda.
2.3 Sensor Pendeteksi Garis
Sensor pendeteksi garis yang digunakan
pada robot pengikut garis didasarkan pada
prinsip pemantulan cahaya tampak maupun
inframerah untuk membedakan warna garis
Gambar 3 Hubungan antara keluaran sensor
fotodioda dan intensitas cahaya.13
4
Gambar 4 Ilustrasi mekanisme sensor garis.13
2.4 Rangkaian Op-Amp
Penguat operasional yang biasa disebut
dengan Op-amp (operational amplifier)
pertama kali dibuat pada tahun 1940-an
dengan menggunakan tabung-tabung hampa
yang berfungsi untuk menjalankan operasioperasi matematika seperti penjumlahan,
pengurangan,
perkalian,
pembagian,
pendiferensiasian,
serta
pengintegrasian
secara elektronika. Op-amp pada jaman
modern, diproduksi dalam bentuk rangkaian
terintegrasi (IC) yang memiliki ukuran yang
jauh lebih kecil dan konsumsi daya yang lebih
sedikit dibanding dengan tempo dahulu. Opamp merupakan salah satu komponen analog
yang sering digunakan dalam berbagai
aplikasi rangkaian elektronika. Dua jenis
rangkaian op-amp yang paling dasar yaitu
rangkaian op-amp inverting (Gambar 5) dan
non-inverting (Gambar 6). Op-amp memiliki
dua terminal masukan, yaitu terminal positif
(+) sebagai masukan non-pembalik dan
terminal negatif (-) sebagai masukan
pembalik.15
Sebuah penguat inverting menggunakan
umpan balik untuk membalikkan dan
menguatkan sebuah tegangan, dalam hal ini
sinyal masukan Vin dihubungkan dengan
input minus (-) dan input plus (+)
dihubungkan dengan ground. Resistor R f
melewatkan sebagian sinyal keluaran kembali
ke masukan. Karena keluaran memiliki beda
fase sebesar 180°, maka nilai keluaran
tersebut secara efektif mengurangi besar
masukan, sehingga juga mengurangi gain
(faktor penguatan) keseluruhan dari penguat
dan ini sering disebut dengan umpan balik.
Pada penguat inverting, faktor penguatannya
ditentukan oleh perbandingan hambatan R in
dan R f yang dipakai. Besar faktor penguatan
pada penguat inverting dapat dinyatakan
sebagai:16
Vout = − �
Rf
Rin
� Vin
,
(2.2)
sehingga penguatannya dapat dinyatakan
sebagai:
Vout
Vin
= −�
Rf
Rin
�
(2.3)
Sebuah penguat non-inverting tidak
menggunakan umpan balik negatif. Penguat
ini sering juga disebut dengan penguat nonpembalik. Pada penguat ini sinyal masukan
Vin dihubungkan dengan input positif (+).
Faktor
penguatannya
ditentukan oleh
perbandingan besarnya hambatan yang
dipakai. Besarnya faktor penguatan pada
penguat non-inverting dapat dinyatakan
sebagai:16
Vout = �1 +
Rf
Rin
� Vin
(2.3)
sehingga penguatannya dapat dinyatakan
sebagai:
Vout
Vin
Gambar 5 Rangkaian op-amp inverting.13
= �1 +
Rf
Rin
�
(2.4)
Keterangan:
V out = tegangan output (volt);
V in = tegangan input (volt);
= besar hambatan output (ohm);
Rf
R in = besar hambatan input (ohm).
2.5 Driver Motor DC
Gambar 6 Rangkaian op-amp non-inverting.13
Motor listrik sering digunakan sebagai
komponen
pengendali
dalam
sistem
pengaturan posisi dan pengaturan kecepatan
pada sebuah robot. Motor listrik dapat
diklasifikasikan dalam dua jenis yaitu motor
DC dan motor AC. Motor DC atau biasa
disebut dengan motor arus searah adalah suatu
mesin yang berfungsi untuk mengubah energi
listrik arus searah menjadi gerak atau energi
mekanik.
5
Bahan dan komponen yang digunakan
antara lain film LiTaO 3 , timah, PCB,
microcontroller AVR atmega16, IC LM324,
IC regulator 7805, IC L293D, motor DC,
resistor, kapasitor, LED high power
inframerah, LED superbright merah dan LDR.
3.3 Prosedur Penelitian
Gambar 7 Konfigurasi IC L293D.19
Konstruksi dasar motor DC terdiri atas
dua bagian utama, yaitu rotor dan stator. Rotor
adalah bagian yang berputar, berupa
kumparan kawat yang dililitkan pada tempat
silinder, dimana arus listrik dapat melaluinya.
Sedangkan stator merupakan bagian yang
tetap dan menghasilkan medan magnet.
Prinsip kerja motor DC adalah jika ada
kumparan dilalui arus maka pada kedua sisi
kumparan akan bekerja gaya Lorentz. Dengan
adanya gaya Lorentz yang bekerja, maka rotor
dapat berputar.17-18 Gambar 7 menunjukkan
konfigurasi IC L293D yang digunakan
sebagai driver motor DC.
IC motor driver L293D dapat beroperasi
pada rentang tegangan antara 4,5 volt – 36
volt dan pada rentang suhu antara 0oC – 70oC.
IC ini digunakan sebagai pengatur arus listrik
secara dua arah. Selain itu, IC L293D juga
dapat digunakan sebagai sistem pengendali
beban induktif seperti relay, solenoid, dan
motor DC. IC ini dapat digunakan untuk
pengendalian motor dua arah putar maupun
pengendalian motor satu arah putar.19
BAB 3
METODOLOGI PENELITIAN
3.1 Tempat dan Waktu
Penelitian dilakukan di Laboratorium
Fisika Material dan Elektronika Dasar,
Departemen Fisika IPB dari Maret 2012
sampai dengan bulan September 2012.
3.2 Alat dan Bahan
Alat yang digunakan pada penelitian ini
adalah dan bahan yang digunakan pada
penelitian ini antara lain komputer, perangkat
lunak Codevision AVR, perangkat lunak
simulasi, solder, multimeter dan project
board.
Prosedur penelitian ini meliputi uji
sensitivitas film LiTaO 3 serta analisis
rangkaian penguat op-amp, perancangan
simulasi dengan perangkat lunak, perancangan
program chip dengan perangkat lunak dan
prototipe robot pengikut garis. Diagram alir
penelitian ditunjukkan pada Gambar 8.
3.3.1 Pemilihan film LiTaO 3
Pemilihan film LiTaO 3 dilakukan
dengan pengujian sensitivitas film LiTaO 3 .
Uji sensitivitas dilakukan dengan cara
mengukur nilai tegangan keluaran yang
dihasilkan oleh film LiTaO 3 terhadap
perubahan intensitas cahaya. Pengujian
sensitivitas ini dilakukan untuk memilih
sensor yang terbaik yang nantinya akan
diterapkan pada robot pengikut garis. Nilai
tegangan keluaran juga digunakan untuk
menganalisis dan menghitung rangkaian
penguat operasional yang akan digunakan.
3.3.2 Perancangan simulasi dan
pemrograman Robot
Simulasi robot pengikut garis pada
penelitian ini dibuat dengan menggunakan
perangkat lunak program simulasi. Sedangkan
pemrograman dibuat dengan menggunakan
perangkat lunak codevision AVR dengan
bahasa pemrograman C. Pemrograman ini
berguna untuk mengendalikan sistem kerja
microcontroller (Lampiran 1).
3.3.3 Pembuatan badan dan rangka
robot
Badan dan rangka robot dibuat dengan
menggunakan PCB. Di dalam badan robot
terdapat tiga tingkatan ruang, yaitu tingkatan
pertama terdapat dua PCB yaitu bagian depan
dan belakang. PCB bagian depan sebagai
dudukan sensor garis yang letaknya di depan
dan menghadap ke bawah. Sedangkan PCB
bagian belakang pada tingkat pertama
digunakan sebagai dudukan IC pengendali
motor DC, IC penguat operasional dan
baterai. Ruang pada tingkatan kedua terdapat
PCB sebagai dudukan rangkaian regulator
catu daya. Sedangkan pada tingkatan ketiga
sebagai
tempat
untuk
meletakkan
6
microcontroller. Motor DC dan gearbox
diletakkan di bagian bawah tingkatan pertama.
horizontal. Skema seluruh badan dan rangka
robot dapat dilihat pada Lampiran 2.
Kedua roda penggerak diletakkan di
belakang dan dihubungkan pada gearbox
supaya roda-roda penggerak dapat terhubung
dengan motor DC. Gearbox tersebut berfungsi
sebagai pereduksi putaran motor dan juga
berfungsi menghasilkan kekuatan putar (torsi)
yang lebih besar. Selain roda-roda penggerak,
juga terdapat satu roda castor yang diletakkan
di depan. Roda ini dapat bergerak secara
bebas, yaitu bergerak ke segala arah secara
3.3.4 Perancangan rangkaian
elektronika
Pada tahap pembuatan rangkaian
elektronika ada tiga prosedur yaitu
perancangan
sensor
pendeteksi
garis,
perancangan rangkaian regulator, dan
perancangan rangkaian aktuator robot.
Gambar 8 Diagram alir penelitian.
7
3.3.4.1 Perancangan sensor pendeteksi
garis
Sensor pendeteksi garis terdiri atas 2
yang
dirangkai
buah
film
LiTaO 3
menggunakan rangkaian penguat operasional
Thevenin untuk menguatkan tegangan
keluaran yang dihasilkan oleh film serta 1
buah LDR yang menggunakan rangkaian
pembagi tegangan. Tegangan keluaran dari
rangkaian penguat operasional maupun
pembagi tegangan akan menjadi sinyal
masukan untuk rangkaian komparator.
Rangkaian komparator dengan IC LM324
diperlukan untuk mempertegas kondisi sinyal
keluaran yang dihasilkan.
berarus tinggi, sehingga dapat mengendalikan
dua buah motor DC sekaligus. IC L293D
dapat mengendalikan motor DC secara dua
arah putar, yaitu searah dengan putaran jarum
jam dan berlawanan arah dengan putaran
jarum jam.
3.3.5 Pengintegrasian rangkaian robot
Rangkaian sensor, penguat operasional,
rangkaian regulator, rangkaian driver motor
DC, dan microcontroller diintegrasikan pada
badan dan rangka menjadi sebuah prototipe
robot (Lampiran 3).
BAB 4
HASIL DAN PEMBAHASAN
3.3.4.2 Perancangan rangkaian
regulator
Rangkaian regulator dirancang dengan
menggunakan IC 7805 yang menghasilkan
tegangan keluaran sebesar 5 volt. IC 7805
memiliki 3 terminal yang diantaranya input
voltage, ground, dan output voltage.
Perancangan ini menggunakan kapasitor yang
dihubungkan pada ketiga terminal tersebut.
Penggunaan kapasitor ini bertujuan untuk
mengurangi noise.
3.3.4.3 Perancangan rangkaian
aktuator robot
Aktuator robot yang digunakan adalah
motor DC sebagai penggerak robot. Motor ini
dihubungkan dengan driver motor DC yaitu
IC L293D. IC ini berisi empat buah driver-H
4.1 Uji Sensitivitas Film LiTaO 3
Pengujian
sensitivitas
dilakukan
terhadap sampel film LiTaO 3 yang sudah
tersedia. Pengujian ini sangat diperlukan
dalam mencari film yang terbaik untuk
diterapkan pada robot pengikut garis. Pada
rangkaian pengujian sensitivitas ini, film
LiTaO 3 dirangkai secara seri dengan sebuah
resistor
100
kohm
yang
kemudian
dihubungkan dengan sumber tegangan 5 volt.
Dari rangkaian tersebut didapatkan nilai
tegangan output dari masing-masing sampel
film akibat adanya perubahan intensitas
cahaya yang jatuh pada permukaan film.
Tabel 1 Hasil uji sensitivitas LiTaO 3
Tegangan Output (mV)
Sampel
2
Ulangan 1
Gelap Terang
∆V ∆lux ∆V/∆lux Gelap
80
103
23
680 0.0338
82
Ulangan 2
Terang ∆V ∆lux ∆V/∆lux
102
20
680 0.0294
4
4.8
4.9
0.1
680
0.0001
5
5.5
0.5
680
0.0007
6
34.5
35
0.5
680
0.0007
32
33
1
680
0.0015
9
1
1.2
0.2
680
0.0003
1.1
1.3
0.2
680
0.0003
10
100
103
3
680
0.0044
98
100
2
680
0.0029
16
2
4
2
680
0.0029
4
5
1
680
0.0015
17
1
2
1
680
0.0015
1.7
2
0.3
680
0.0004
24
131
139
8
680
0.0118
132
141
9
680
0.0132
8
25
Tegangan Output (mV)
20
Ulangan 1
15
Ulangan 2
10
5
0
2
4
6
9
Sampel
10
16
17
24
Gambar 9 Beda tegangan output pada ulangan 1 dan 2.
Pengujian sampel dilakukan pada dua
kondisi, yaitu kondisi gelap (sekitar 24 lux)
dan kondisi terang (sekitar 704 lux). Hasil
pengujian sensitivitas film dapat dilihat pada
Tabel 1 dan Gambar 9. Tegangan output yang
dihasilkan pada kondisi terang lebih besar
daripada tegangan yang dihasilkan pada
kondisi gelap. Hal ini disebabkan semakin
meningkatnya intensitas cahaya yang jatuh
pada permukaan fotodioda maka nilai
konduktivitas listrik juga meningkat.13
Elektron yang tereksitasi ke pita konduksi ini
meningkatkan pembawa muatan sehingga
meningkatkan konduktivitas listrik.20 Pada
kondisi terang, intensitas cahaya yang jatuh
pada film meningkat, maka semakin banyak
elektron yang tereksitasi dari pita valensi ke
pita konduksi. Sedangkan pada kondisi gelap
terjadi sebaliknya.21
Sensitivitas adalah perubahan output
yang dapat dideteksi akibat adanya perubahan
parameter input minimum yang diberikan
pada sensor.19 Sensitivitas sensor juga dapat
disebut
sebagai
perbandingan
antara
perubahan besarnya tegangan terhadap
perubahan intensitas cahaya yang jatuh pada
permukaan sensor (∆V/∆lux). Semakin besar
perubahan tegangan yang dihasilkan maka
sensor akan semakin sensitif. Berdasarkan
hasil pengujian sensitivitas film LiTaO 3 ,
terlihat bahwa pada sampel film LiTaO 3 yang
diproses annealing pada suhu 800oC selama 1
jam (sampel 2) dan film yang diproses
annealing pada suhu 850oC selama 15 jam
(sampel 24) memiliki nilai perubahan
tegangan yang paling besar dibandingkan
dengan sampel lain (sampel 4, 6, 9, 10, 16,
17) sehingga dapat dikatakan bahwa kedua
film tersebut memiliki nilai sensitivitas yang
paling tinggi dibandingkan nilai sensitivitas
sampel yang lain. Hal ini juga dapat dilihat
pada Gambar 10.
Pada pengujian ini juga didapatkan
bahwa sampel 4, 6, 9, 10, 16 dan 17
menghasilkan beda tegangan yang masih
sangat kecil dan cenderung sangat tidak stabil,
yaitu sering kali tidak terjadi perubahan
tegangan output ketika berada pada bidang
gelap dan terang. Dari nilai sensitivitas dan
stabilitas film tersebut, maka dipilih film yang
diterapkan sebagai sensor pendeteksi garis,
yaitu sampel 2 dan sampel 24.
9
0.035
0.03
∆V/∆lux
0.025
Ulangan 1
0.02
Ulangan 2
0.015
0.01
0.005
0
2
4
6
9
Sampel
10
16
17
24
Gambar 10 Sensitivitas film LiTaO 3 pada ulangan 1 dan 2.
4.2 Rancangan Film LiTaO 3 sebagai
Sensor Pendeteksi Garis
Sebelum membuat rangkaian sensor
pendeteksi garis, perlu dilakukan pengujian
terhadap dua buah film LiTaO 3 (sampel 2 dan
24). Pengujian ini dilakukan dengan
mengukur tegangan output (Vout) yang
dihasilkan oleh film pada bidang pantul gelap
dan terang. Rangkaian pengujian ditunjukkan
pada Gambar 11. Pada bidang pantul gelap
intensitas cahaya yang ditangkap film LiTaO 3
sangat sedikit sehingga tegangan outputnya
(Vg) kecil. Sedangkan pada kondisi terang
intensitas cahaya yang ditangkap film LiTaO 3
lebih banyak sehingga tegangan outputnya
(Vt) lebih besar. Tegangan output hasil
pengujian ditunjukkan pada Tabel 2; 3; 4; 5; 6
dan 7.
Gambar 11 Rangkaian uji film LiTaO 3 terhadap tegangan output.
Tabel 2 Hasil pengujian film pada bidang pantul dengan LED superbright hijau
Sampel 2
Tegangan output (V)
Jarak sampel
terhadap bidang
pantul (cm)
Vg
(V)
Vt (V)
Ulangan 1
Vt (V)
Ulangan 2
Vt (V)
Ulangan 3
Vt (V)
Rataan
1
1.05
1.45
1.42
1.43
1.43
0.38
2
1.05
1.40
1.42
1.41
1.41
0.36
3
4
1.05
1.39
1.40
1.38
1.39
0.34
1.05
1.37
1.38
1.36
1.37
0.32
5
1.05
1.33
1.32
1.33
1.33
0.28
∆V (V)
Rataan
10
Sampel 24
Tegangan output (V)
Jarak sampel
terhadap bidang
pantul (cm)
Vg
(V)
Vt (V)
Ulangan 1
Vt (V)
Ulangan 2
Vt (V)
Ulangan 3
Vt (V)
Rataan
1
2.08
2.40
2.38
2.39
2.39
0.31
2
2.08
2.35
2.36
2.35
2.35
0.27
3
4
2.08
2.34
2.33
2.35
2.34
0.26
2.08
2.31
2.30
2.32
2.31
0.23
5
2.08
2.28
2.27
2.28
2.27
0.19
∆V (V)
Rataan
Tabel 3 Hasil pengujian film pada bidang pantul dengan LED superbright biru
Sampel 2
Tegangan Output (V)
Jarak sampel
terhadap bidang
pantul (cm)
Vg
(V)
Vt (V)
Ulangan 1
Vt (V)
Ulangan 2
Vt (V)
Ulangan 3
Vt (V)
Rataan
1
1.05
1.48
1.47
1.48
1.48
0.43
2
1.05
1.44
1.45
1.43
1.44
0.39
3
4
1.05
1.42
1.43
1.40
1.42
0.37
1.05
1.39
1.41
1.41
1.40
0.35
5
1.05
1.36
1.38
1.35
1.36
0.31
∆V (V)
Rataan
Sampel 24
Jarak sampel
terhadap bidang
pantul (cm)
Tegangan output (V)
Vg
(V)
Vt (V)
Ulangan 1
Vt (V)
Ulangan 2
Vt (V)
Ulangan 3
Vt (V)
Rataan
∆V (V)
Rataan
1
2.08
2.48
2.48
2.47
2.48
0.40
2
2.08
2.44
2.45
2.46
2.45
0.37
3
4
2.08
2.43
2.45
2.44
2.44
0.36
2.08
2.43
2.42
2.41
2.42
0.34
5
2.08
2.39
2.39
2.38
2.39
0.31
Tabel 4 Hasil pengujian film pada bidang pantul dengan LED superbright kuning
Sampel 2
Tegangan output (V)
Jarak sampel
terhadap bidang
pantul (cm)
Vg
(V)
Vt (V)
Ulangan 1
Vt (V)
Ulangan 2
Vt (V)
Ulangan 3
Vt (V)
Rataan
1
1.05
1.36
1.38
1.37
1.37
0.32
2
1.05
1.35
1.34
1.35
1.35
0.30
3
4
1.05
1.29
1.30
1.28
1.29
0.24
1.05
1.28
1.31
1.30
1.30
0.25
5
1.05
1.25
1.27
1.26
1.26
0.21
∆V (V)
Rataan
11
Sampel 24
Tegangan output (V)
Jarak sampel
terhadap bidang
pantul (cm)
Vg
(V)
Vt (V)
Ulangan 1
Vt (V)
Ulangan 2
Vt (V)
Ulangan 3
Vt (V)
Rataan
1
2.08
2.36
2.35
2.35
2.35
0.27
∆V (V)
Rataan
2
2.08
2.32
2.31
2.31
2.31
0.23
3
4
2.08
2.28
2.28
2.29
2.28
0.20
2.08
2.28
2.26
2.27
2.27
0.19
5
2.08
2.23
2.24
2.22
2.23
0.15
Tabel 5 Hasil pengujian film pada bidang pantul dengan LED superbright putih
Sampel 2
Jarak sampel
terhadap bidang
pantul (cm)
Tegangan output (V)
Vg
(V)
Vt (V)
Ulangan 1
Vt (V)
Ulangan 2
Vt (V)
Ulangan 3
Vt (V)
Rataan
∆V (V)
Rataan
1
1.05
1.31
1.33
1.31
1.32
0.27
2
1.05
1.28
1.29
1.27
1.28
0.23
3
4
1.05
1.25
1.23
1.26
1.25
0.20
1.05
1.14
1.16
1.18
1.16
0.11
5
1.05
1.15
1.17
1.18
1.17
0.12
Sampel 24
Tegangan output (V)
Jarak sampel
terhadap bidang
pantul (cm)
Vg
(V)
Vt (V)
Ulangan 1
Vt (V)
Ulangan 2
Vt (V)
Ulangan 3
Vt (V)
Rataan
1
2.08
2.31
2.30
2.32
2.31
0.23
2
2.08
2.24
2.23
2.25
2.24
0.16
3
4
2.08
2.22
2.23
2.22
2.22
0.14
2.08
2.19
2.20
2.20
2.20
0.12
5
2.08
2.16
2.17
2.15
2.16
0.08
∆V (V)
Rataan
Tabel 6 Hasil pengujian film pada bidang pantul dengan LED superbright merah
Sampel 2
Tegangan output (V)
Jarak sampel
terhadap bidang
pantul (cm)
Vg
(V)
Vt (V)
Ulangan 1
Vt (V)
Ulangan 2
Vt (V)
Ulangan 3
Vt (V)
Rataan
1
1.05
1.46
1.47
1.47
1.47
0.42
2
1.05
1.44
1.45
1.43
1.44
0.39
3
4
1.05
1.41
1.42
1.41
1.41
0.36
1.05
1.40
1.41
1.41
1.41
0.36
5
1.05
1.38
1.39
1.38
1.38
0.33
∆V (V)
Rataan
12
Sampel 24
Tegangan output (V)
Jarak sampel
terhadap bidang
pantul (cm)
Vg
(V)
Vt (V)
Ulangan 1
Vt (V)
Ulangan 2
Vt (V)
Ulangan 3
Vt (V)
Rataan
1
2.08
2.49
2.50
2.48
2.49
0.41
2
2.08
2.40
2.41
2.40
2.40
0.32
3
4
2.08
2.37
2.38
2.38
2.38
0.30
2.08
2.36
2.36
2.36
2.36
0.28
5
2.08
2.30
2.29
2.28
2.29
0.21
∆V (V)
Rataan
Tabel 7 Hasil pengujian film pada bidang pantul dengan LED high power inframerah (IR)
Sampel 2
Jarak sampel
terhadap bidang
pantul (cm)
Tegangan output (V)
Vt (V)
Vt (V)
Vt (V)
Ulangan 1
Ulangan 2
Ulangan 3
1.49
1.48
1.49
1
2
1.05
3
4
1.05
1.46
1.47
1.05
1.43
1.44
5
1.05
1.40
1.41
1.39
Vg
(V)
Vt (V)
Ulangan 1
1
2.08
2.50
2.49
2.50
2.50
0.42
2
2.08
2.47
2.48
2.47
2.47
0.39
3
4
2.08
2.46
2.46
2.44
2.45
0.37
2.08
2.43
2.44
2.44
2.44
0.36
5
2.08
2.42
2.42
2.42
2.42
0.34
Sampel 24
Jarak sampel
terhadap bidang
pantul (cm)
1.48
1.49
Vt (V)
Rataan
1.49
∆V (V)
Rataan
Vg
(V)
1.05
1.48
0.44
1.48
0.43
1.47
1.47
0.42
1.42
1.43
0.38
1.40
0.35
Tegangan output (V)
Vt (V)
Vt (V)
Ulangan 2
Ulangan 3
Vt (V)
Rataan
∆V (V)
Rataan
0.45
∆V (volt)
0.4
0.35
LED Hijau
0.3
LED Biru
0.25
LED Kuning
0.2
LED Putih
0.15
LED Merah
0.1
LED Inframerah
0.05
0
1
2
3
4
5
Jarak Sampel terhadap Bidang Pantul (cm)
Gambar 12 Beda tegangan output sampel 2 dengan variasi warna LED dan jarak bidang pantul.
13
0.45
∆V (volt)
0.4
0.35
LED Hijau
0.3
LED Biru
0.25
LED Kuning
0.2
LED Putih
0.15
LED Merah
0.1
LED Inframerah
0.05
0
1
2
3
4
Jarak Sampel terhadap Bidang Pantul (cm)
5
Gambar 13 Beda tegangan output sampel 24 dengan variasi warna LED dan jarak bidang pantul.
Pengujian film ini menggunakan variasi
jenis warna LED dan jarak bidang pantul.
LED yang digunakan yaitu LED superbright
cahaya tampak dan LED high power
inframerah (IR), karena LED tersebut
menghasilkan cahaya dengan intensitas ideal
yang tinggi. Penggunaan variasi jenis warna
LED bertujuan supaya dapat dipilih jenis
warna LED terbaik yang akan digunakan pada
sensor pendeteksi garis. Jenis warna LED
digunakan pada pengujian ini yaitu hijau, biru,
kuning, putih, merah dan inframerah.
Sedangkan variasi jarak bidang pantul uji
yang digunakan yaitu 1 cm, 2 cm, 3 cm, 4 cm
dan 5 cm.
Gambar 12 dan 13 menunjukkan bahwa
beda tegangan output (∆V) terbesar dihasilkan
oleh film yang disinari dengan LED high
power IR dan jarak bidang pantul 1 cm.
Hubungan antara kuat penerangan dari sumber
cahaya dengan kuat cahaya dan jarak
menyatakan
bahwa
kuat
penerangan
berbanding lurus terhadap kuat cahaya dan
berbanding terbalik terhadap kuadrat jarak
dari sumbernya.22
𝐸=
𝐼
𝑅2
Keterangan:
E = kuat penerangan (lux);
I = kuat/intensitas cahaya (lumen.sr-1);
R = jarak (m).
(4.1)
Semakin dekat jarak film LiTaO 3
terhadap bidang pantul, maka semakin besar
kuat penerangan pantulan IR yang ditangkap
oleh film, akibatnya tegangan outputnya juga
semakin besar.23
Pada sampel 24 sering terjadi
ketidakstabilan dalam pembacaan kondisi
gelap dan terang. Ketidakstabilan film yang
dimaksud yaitu film sering kali tidak dapat
membedakan kondisi gelap dan terang. Hal ini
dapat mengakibatkan error pada sistem robot,
sehingga dalam penerapan ke robot masih
diperlukan sebuah sensor tambahan yang peka
terhadap cahaya untuk menjaga stabilitas kerja
robot.
Robot pengikut garis pada penelitian ini
menggunakan dua buah film LiTaO 3 (sampel
2 dan 24) sebagai receiver dan empat buah
LED high power IR sebagai transmitter. LED
ini dapat menghasilkan radiasi IR dengan
panjang gelombang (λ) 850 nm dan intensitas
radian idealnya 30 mW.sr-1.24 Perubahan
tegangan jatuh yang dihasilkan film LiTaO 3
masih sangat kecil sehingga diperlukan
rangkaian penguat operasional (op-amp) agar
dapat dibaca oleh microcontroller. Rangkaian
op-amp pada penelitian ini menggunakan IC
LM324 yang di dalamnya terdapat empat
buah op-amp yang setiap komponennya
bekerja tidak saling mempengaruhi dan IC ini
dapat bekerja pada tegangan 5 volt.
Rangkaian op-amp yang digunakan pada
penelitian ini, yaitu rangkaian penguat
operasional
Thevenin
dan
rangkaian
komparator. Rangkaian penguat Thevenin
(Gambar
14)
mempunyai
persamaan
rangkaian yang diperoleh dari persamaan
Thevenin.25 Rangkaian penguat ini digunakan
14
untuk memperbesar beda tegangan jatuh
antara kondisi gelap dan kondisi terang yang
dihasilkan film LiTaO 3 . Awalnya beda
tegangan output yang dihasilkan oleh sampel
2 sebesar 0.44 volt dan sampel 24 sebesar
0.42 volt. Beda tegangan output sampel 2 dan
24 yang dihasilkan setelah dikuatkan masingmasing sebesar 2 volt, dimana tegangan
output pada saat kondisi gelap sebesar 1 volt
dan kondisi terang sebesar 3 volt. Perhitungan
gain
berdasarkan
persamaan
penguat
operasional Thevenin pada sampel 2 dan 24
ditunjukan pada Lampiran 4. Hasil tegangan
output pada rangkaian penguat dari kedua
sampel mengacu pada persamaan:25
𝑉𝑜𝑢𝑡 = �
𝑅𝐹 + 𝑅𝐺 + 𝑅1 ||𝑅2
� 𝑉𝑖𝑛 −
𝑅𝐺 + 𝑅1 ||𝑅2
𝑅2
𝑅
� �𝑅 +𝑅𝐹 ||𝑅 �
+𝑅
1
2
𝐺
1
2
𝑉𝑟𝑒𝑓 �𝑅
(4.2)
, nilai m dan b sama dengan, sebagai berikut:
𝑚=
𝑅𝐹 +𝑅𝐺 +𝑅1 ||𝑅2
𝑅𝐺 +𝑅1 ||𝑅2
𝑅2
𝑅
� �𝑅 +𝑅𝐹 ||𝑅 �
𝑅1 +𝑅2
𝐺
1
2
|𝑏| = 𝑉𝑟𝑒𝑓 �
Sehingga
Keterangan:
V out
V in
V ref
𝑉𝑜𝑢𝑡 = 𝑚𝑉𝑖𝑛 − 𝑏
RF, RG, R1, R2
(4.3)
(4.4)
(4.5)
= tegangan output (volt);
= tegangan input (volt);
= tegangan referensi
(volt);
= besar hambatan pada
rangkaian penguat
operasional Thevenin
(ohm).
Gambar 14 Skema rangkaian penguat
operasional Thevenin.
Gambar 15 Skema rangkaian komparator.
Sinyal output dari film LiTaO 3 yang
telah dikuatkan oleh rangkaian penguat
diproses lagi dengan rangkaian komparator
(Gambar 15). Prinsip kerja komparator adalah
membandingkan input non-inverting (+) dan
input inverting (-).26 Rangkaian komparator
pada penelitian ini menggunakan lampu LED
sebagai lampu indikator. Ketika film LiTaO 3
terkena pantulan cahaya maka lampu LED
menyala. Sedangkan ketika film tidak terkena
pantulan cahaya maka lampu LED mati. Hal
ini mengindikasikan bahwa ketika lampu LED
menyala maka output dari rangkaian
komparator bernilai logika ‘1’ dan ketika
lampu LED mati maka output dari rangkaian
komparator bernilai logika ‘0’. Rangkaian
komparator juga menggunakan trimpot
(resistor variabel) untuk kalibrasi terhadap
lingkungan. Intensitas cahaya dari lingkungan
luar mempengaruhi hasil tegangan output dari
komparator. Sehingga diperlukan trimpot
supaya komparator tetap dapat membedakan
bidang pantul gelap dan terang di setiap
lingkungan.
Prinsip dari pendeteksi garis ini yaitu
ketika LED inframerah memancarkan sinar ke
bidang berwarna putih maka sebagian besar
sinar dipantulkan oleh bidang dan pantulannya
diterima oleh film, sedangkan ketika LED
inframerah memancarkan sinar ke bidang
berwarna hitam maka sebagian besar sinar
diserap oleh bidang dan sangat sedikit sinar
yang diterima oleh film LiTaO 3 . Sinar hasil
pemantulan inilah yang akan dideteksi oleh
film. Ilustrasi sensor pendeteksi garis
ditunjukkan pada Gambar 17 dan 18.
Sebagai sensor tambahan, digunakan
sebuah sensor light dependent resistor (LDR)
dengan LED superbright merah. LDR
merupakan jenis resistor yang tersusun atas
bahan semikonduktor dan memiliki nilai
tahanan tergantung pada intensitas cahaya
yang diterimanya.27 Pada penelitian ini, LDR
dirangkai dengan menggunakan rangkaian
pembagi tegangan dengan cara LDR dirangkai
seri dengan sebuah resistor 100 kohm.
Keluaran LDR langsung dihubungkan ke
rangkaian komparator. Penggunaan LDR
bertujuan menjaga stabilitas kerja robot.
Pengintegrasian rangkaian film LiTaO 3 dan
LDR sebagai sensor pendeteksi garis dapat
dilihat pada skema rangkaian robot pengikut
garis (Gambar 16).
15
Gambar 16 Skema rangkaian robot pengikut garis tanpa transmitter.
15
16
4.4 Rangkaian Catu Daya
Gambar 17 Ilustrasi sensor pendeteksi garis
pada bidang pantul berwarna
hitam.
Gambar 18 Ilustrasi sensor pendeteksi garis
pada bidang pantul berwarna
putih.
4.3 Sensitivitas Robot Pengikut Garis
Rangkaian penguat Thevenin yang
digunakan
pada
rangkaian
sensor
mempengaruhi sensitivitas robot. Pada
analisis perhitungan berdasarkan persamaaan
penguat Thevenin diperoleh Vin maksimum
dari sampel 2 dan 24 (lampiran 4). Persamaan
V out yang diperoleh dari analisis perhitungan
penguatan Thevenin berdasarkan rangkaian
untuk sampel 2 dan 24 yaitu:
V out = 6V in - 6,20 (sampel 2)
(4.6)
V out = 4V in – 8,81 (sampel 24)
(4.7)
Persamaan 4.6 dan 4.7 ini digunakan
untuk mengetahui sensitivitas robot. Vin
maksimum pada sampel 2 diperoleh sebesar
1,87 volt dan sampel 24 sebesar 3,45 volt.
Hasil perhitungan ini menunjukkan bahwa
batas tegangan input maksimum penguat
Thevenin pada sampel 2 sebesar 1,87 volt dan
sampel 24 sebesar 3,45 volt. Jika tegangan
input saat kondisi lintasan gelap pada penguat
Thevenin lebih besar atau sama dengan batas
tegangan maksimum tersebut, maka rangkaian
komparator tidak dapat membedakan garis
lintasan gelap dan latar bidang terangnya. Hal
ini mengakibatkan robot tidak dapat berjalan
menurut lintasannya.
Pembuatan rangkaian catu daya untuk
robot pada penelitian ini menggunakan IC
Regulator 7805. Rangkaian catu daya ini
berfungsi sebagai regulator tegangan yang
dimasukkan pada rangkaian pembangun robot
pengikut garis. IC Regulator 7805 berguna
untuk menurunkan tegangan baterai sebesar 9
volt menjadi tegangan output yang stabil
sebesar 5 volt.11 Penurunan tegangan ini
bertujuan menyediakan tegangan bagi
komponen yang memerlukan suplai tegangan
sebesar 5 volt. Sensor dan penguat
operasionalnya memerlukan suplai tegangan
sebesar 5 volt. Hal ini supaya tegangan output
sensor yang telah dikuatkan dapat dibaca oleh
port pada microcontroller. Sedangkan LED
dapat bekerja dengan baik dengan suplai
tegangan 5 volt sehingga LED juga
memerlukan tegangan sebesar 5 volt.
Rangkaian catu daya pada penelitian ini
dipisahkan masing-masing menjadi 3 buah
rangkaian agar tidak saling membebani dan
mengganggu rangkaian satu dengan lainnya.
Sehingga pada penelitian ini diperlukan 3
buah rangkaian regulator dan 3 buah baterai 9
volt. Tegangan output (Vo) sebesar 5 volt dari
masing-masing IC Regulator 7805 digunakan
untuk menyediakan tegangan bagi rangkaian
sensor, rangkaian transmitter, dan IC LM324.
Sedangkan tegangan input (V I ) sebesar 9 volt
pada masing-masing IC digunakan untuk
menyediakan tegangan bagi microcontroller,
rangkaian driver motor DC dan motor DC.
Pada penelitian ini, digunakan 2 jenis baterai
yaitu baterai heavy duty (karbon seng) dan
baterai alkaline (alkali). Pembebanan yang
paling besar terjadi pada rangkaian motor DC.
Sehingga pada rangkaian tersebut diperlukan
baterai yang relatif tahan lama saat
pembebanan, yaitu baterai alkali. Skema
rangkaian catu daya ditunjukkan pada
Gambar 19.
Gambar 19 Rangkaian catu daya.
17
4.5 Rancangan Driver Motor DC
Driver motor DC pada penelitian ini
menggunakan sebuah IC L293D. IC ini dapat
beroperasi pada rentang tegangan antara 4,5
volt – 36 volt dan pada rentang suhu antara
0oC – 70oC.20 Pada penelitian ini, driver motor
DC menggunakan suplai tegangan sebesar 5
volt karena pada tegangan ini IC L293D
masih dapat beroperasi dengan baik.
Penggunaan tegangan sebesar 5 volt ini juga
supaya tidak terlalu membebani baterai. Tugas
utama dari IC ini adalah mengendalikan
putaran kedua motor DC sebagai penggerak
robot berdasarkan perintah dari chip
microcontroller.
Gerak
kedua
motor
ditentukan oleh input yang diberikan pada IC.
Terdapat enam jalur input pada IC L293D
yang terdiri atas dua jalur PWM (pulse width
modulator) untuk pengaturan kecepatan dan
empat jalur untuk arah pergerakan motor.
Kecepatan motor akan diatur oleh variasi
lebar
pulsa
yang
diberikan
oleh
microcontroller sebagai input PWM. Variasi
lebar pulsa pada microcontroller diatur
dengan menggunakan sintaks:
delay_us(100);
Dari hasil pengujian didapat beberapa
kondisi input yang dapat diberikan dan arah
pergerakan motor. Tabel 8 menunjukkan hasil
pengujian input dan output yang dihasilkan.
4.6 Rangkaian Pengendali Sistem
Robot
Rangkaian pengendali sistem robot pada
penelitian ini adalah sebuah microcontroller 8
bit Atmega16 yang akan mengendalikan
rangkaian pendukung pada sistem robot.
Sinyal output dari rangkaian sensor garis
adalah sinyal inputan bagi microcontroller.
Sinyal output masing-masing sensor diolah
oleh microcontroller menjadi data yang siap
diproses pada driver motor DC. Untuk bisa
membedakan garis, pertama pada kondisi
awal robot berada pada bidang hitam dan
microcontroller akan membaca tegangan
input. Tegangan awal ini akan diartikan
bahwa sensor sedang berada di atas bidang
hitam. Jika tegangan input mengalami
kenaikan yang cukup signifikan maka
microcontroller akan menyimpulkan bahwa
sensor sedang berada di atas bidang putih.
4.7 Pengujian Robot
Pengujian dilakukan secara keseluruhan
pada rancangan yang sudah diintegrasikan
menjadi sebuah robot pengikut garis
(Lampiran 4). Robot pengikut garis yang
dihasilkan pada penelitian ini berbentuk mobil
yang memiliki massa sebesar 402 gram serta
panjang, lebar dan tingginya masing-masing
yaitu 17 cm, 15 cm dan 13 cm. Pengujian
yang pertama adalah pengujian fungsional
sensor. Pengujian ini untuk memeriksa
kesesuaian input yang diberikan dengan
output yang ditunjukkan oleh pergerakan
motor. Hasil pengujian fungsional sensor
ditunjukkan oleh Tabel 9. Pengujian ini
menggunakan lintasan berwarna hitam di atas
bidang berwarna putih. Robot akan bergerak
mengikuti garis hitam. Pergerakan robot
diatur
oleh
program
yang
dibuat
menggunakan perangkat lunak (Lampiran 1).
Tabel 8 Hasil pengujian input pada driver motor dan arah pergerakan motor
Input
Motor Kanan
Input 1
Input 2
Motor Kiri
Input 3
Input 4
Output
1
1
1
1
Motor kanan dan motor kiri berhenti
1
0
0
1
Motor kanan dan motor kiri maju
0
1
1
0
Motor kanan dan motor kiri mundur
1
0
1
1
Motor kanan maju dan motor kiri berhenti
1
1
0
1
Motor kanan berhenti dan motor kiri maju
0
1
0
1
Motor kanan mundur dan motor kiri maju
18
Ketika sensor tengah berada pada garis
hitam serta sensor kanan dan kiri berada pada
bidang berwarna putih maka robot bergerak
maju (Gambar 20 (a)). Gerakan robot ini
diatur dengan menggunakan sintaks:
void maju(void)
{
Sebaliknya ketika robot menemukan
tikungan ke kanan maka sensor kanan berada
pada bidang hitam serta sensor tengah dan kiri
berada pada bidang putih (Gambar 20 (c)),
sehingga robot berbelok ke kanan yang diatur
dengan menggunakan sintaks:
void belok_kanan(void)
{
PORTC.0=0;
PORTC.1=1;
PORTC.6=1;
PORTC.7=1;
delay_us(100); stop();}
PORTC.0=0;
PORTC.1=1;
PORTC.6=1;
PORTC.7=0;
delay_us(100);stop();}
Ketika ada tikungan ke kiri maka sensor
kiri berada pada garis hitam serta sensor
tengah dan kanan berada pada bidang putih
(Gambar 20 (b)). Roda kanan bergerak maju
dan roda kiri diam sehingga robot berbelok ke
kiri. Gerakan tersebut diatur dengan
menggunakan sintaks:
void belok_kiri(void)
{
PORTC.0=1;
PORTC.1=1;
PORTC.6=1;
PORTC.7=0;
delay_us(100); stop();}
Kondisi terakhir adalah jika robot
menemukan lintasan buntu maka ketiga
sensor berada pada bidang putih. Pada kondisi
ini roda kanan bergerak maju dan roda kiri
bergerak mundur sehingga robot berputar
balik sampai menemukan kembali lintasannya
(Gambar 20 (d)). Sintaks yang digunakan:
void putar_balik(void)
{
PORTC.0=0;
PORTC.1=1;
PORTC.6=0;
PORTC.7=1;
delay_us(100); stop();}
Tabel 9 Hasil pengujian fungsional sensor
No.
Posisi sensor
1
Sensor tengah berada
pada bidang hitam,
Sensor kiri dan kanan
berada pada bidang
putih.
Sensor kiri berada
pada bidang hitam,
sensor tengah dan
kanan berada pada
bidang putih.
Sensor kanan berada
pada bidang hitam,
sensor tengah dan kiri
berada pada bidang
putih.
Ketiga sensor berada
pada bidang putih.
2
3
4
Biner
input
101
Hasil yang diharapkan
Robot bergerak maju (kedua
roda bergerak maju).
Biner
output
0110
Hasil uji
Berhasil
011
Robot berbelok ke kiri (roda
kanan bergerak maju dan
roda kiri diam).
1110
Berhasil
110
Robot berbelok ke kanan
(roda kiri bergerak maju dan
roda kanan diam).
0111
Berhasil
111
Robot berputar balik ke
kanan (roda kiri bergerak
maju dan roda kanan
bergerak mundur).
0101
Berhasil
19
Gambar 20 Posisi sensor dan arah pergerakan roda pada robot ketika pada (a) lintasan lurus
(b) tikungan ke kiri (c) tikungan ke kanan (d) lintasan buntu.
Dari data (Tabel 9) terdapat 3 bit biner
input dan 4 bit biner output. Hal ini karena
terdapat 3 buah sensor pada robot dan masingmasing sensor mewakili input 1 bit, sehingga
dibutuhkan 3 bit untuk memberi input pada
microcontroller. Sedangkan biner outputnya
terdapat 4 bit karena driver motor DC
membutuhkan 4 bit biner untuk mengatur
pergerakan 2 buah motor DC.
Pengujian yang kedua adalah pengujian
fungsional robot. Robot berjalan pada sebuah
jalur hitam di atas bidang putih yang
mengarahkannya bergerak ke kanan, ke kiri,
maupun lurus. Hasil pengujian fungsional
robot dengan variasi sudut tikungan
ditunjukkan oleh Tabel 10. Pada variasi sudut
tikungan 0 sampai 90 derajat tikungan pada
lintasan, robot dapat berbelok dengan baik.
Serta pada sudut 180 derajat (lintasan buntu),
robot juga dapat berputar balik dengan baik.
Dari hasil pengujian tersebut terlihat bahwa
robot dapat bergerak sesuai dengan yang
diharapkan.
Tabel 10 Hasil pengujian fungsional robot
dengan variasi sudut tikungan
No.
Sudut
tikungan
1
2
3
4
5
6
7
8
9
10
00
100
200
300
400
500
600
700
800
900
Hasil pengujian
Belok
Belok
kanan
kiri
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
Berhasil
BAB 5
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Pengujian sensitivitas telah dilakukan
terhadap 8 sampel yang tersedia (sampel 2, 4,
6, 9, 10, 16, 17 dan 24). Berdasarkan 8 sampel
yang telah dilakukan pengujian sensitivitas,
sampel 2 dan 24 memiliki sensitivitas yang
paling baik.
Prototipe robot pengikut garis telah
berhasil dibuat dengan menggunakan sensor
film LiTaO 3 berbantukan light dependent
resistor (LDR). Pengendali sistem robot yang
digunakan adalah microcontroller AVR
Atmega16. Rangkaian penguat operasional
yang digunakan pada rangkaian sensor robot
adalah rangkaian penguat Thevenin dan
rangkaian komparator.
Sebagai sumber cahaya digunakan LED
high power inframerah karena film LiTaO 3
menghasilkan beda tegangan keluaran
tertinggi saat membedakan bidang berwarna
gelap dan terang. Lintasan yang digunakan
sebagai pemandu robot adalah garis hitam di
atas bidang putih.
5.2. Saran
Diperlukan pendingin bagi IC regulator
pada rangkaian catu daya untuk mengurangi
panas yang dihasilkan oleh IC saat
pembebanan catu daya, serta diperlukan
pelindung yang transparan dan kuat supaya
tidak menghalangi pantulan cahaya menuju
film serta untuk menghindari benturan dan
gesekan terhadap lintasan.
Perlu digunakan rangkaian analog to
digital converter (ADC) pada microcontroller
AVR Atmega16 agar robot dapat melakukan
20
kalibrasi secara otomatis sehingga robot dapat
menyesuaikan
dengan
kondisi
kuat
penerangan cahaya dari lingkungan tanpa
harus mengatur resistor variabel (trimpot)
pada rangkaian komparator. Serta perlu
digunakan rangkaian filter untuk mengurangi
noise akibat adanya medan magnet dari
rangkaian robot.
DAFTAR PUSTAKA
1. Raharjo SB, Sutopo B. Robot pengikut
garis berbasis mikrokontroler AT89C51
menggunakan
sensor
inframerah.
Yogyakarta:
UGM;
2004.
http://te.ugm.ac.id/~bsutopo [14 Feb
2012].
2. Chan CC, Kao MC, Chen YC. Effects of
membrane thickness on the pyroelectric
properties of LiTaO 3 thin film IR
detectors. Japanese Journal of Applied
Physics 2005; 44:0000–0000.
3. Gonzalez AHM, Simoes AZ, Zaghete
MA, Varela JA. Effect of preannealing
on the morphology of LiTaO3 thin films
prepared from the polymeric precursor
method. Materials Characterization
2003; 50:233–238.
4. Indro MN, Sastri B, Nady L, Ridwan E,
Syafutra H, Irzaman, Siswadi. Uji sifat
listrik film tipis LiTaO 3 dan LiTaFe 2 O 3 .
Berkala Fisika 2010; 13:C5-C12.
5. Indro MN, Irzaman, Sastri B, Nady L,
Syafutra H, Siswadi. Electric and
pyroelectric properties of LiTaO 3 and
LiTaFe 2 O 3 films. The International
Conference on Materials Science and
Technology 2010; 1:303-308.
6. Kazuhisa Y. Domain inversion in
LiTaO 3 using proton exchange followed
by heat treatment. J. Applied Physics
1993; 75:1312-1320.
7. Aziz M. Pembuatan alat ukur
kapasitansi kapasitor Leyden JAR
dengan bahan dielektrik larutan garam
berbasis mikrokontroler dan tampilan
LCD
[skripsi].
Bogor:
Fakultas
Matematika dan Ilmu Pengetahuan
Alam, Institut Pertanian Bogor; 2009.
8. Setiawan A. 20 Aplikasi Mikrokontroler
ATMega8535
dan
ATMega16
Menggunakan
BASCOM-AVR.
Yogyakarta: ANDI; 2011.
9. Suyadhi TDS. Build Your Own Line
Follower Robot Ed ke-1. Yogyakarta:
ANDI; 2008.
10. [Atmel
Corp].
8-bit
AVR
microcontroller with 16K bytes insystem programmable flash. [Tempat
tidak diketahui]: Atmel Corp; 2002.
11. Kurniawan A. Robot line follower
(pengikut garis) berbasis mikrokontroler
[skripsi]. Bandung: Fakultas Pendidikan
Matematika dan Ilmu Pengetahuan
Alam,
Universitas
Pendidikan
Indonesia; 2009.
12. Fahmizal. Merancang rangkaian sensor
http://
garis.
Wordpress
2010.
fahmizaleeits.wordpress.com/2010/07/2
5/merancang–rangkaian–sensorgaris/
[18 Feb 2012].
13. Kurniawan A. Penerapan fotodioda film
Ba 0.5 Sr 0.5 TiO 3 (BST) sebagai detektor
garis pada robot line follower berbasis
mikrokontroler ATMega8535 [skripsi].
Bogor: Fakultas Matematika dan Ilmu
Pengetahuan Alam, Institut Pertanian
Bogor; 2011.
14. [Anonim]. Prinsip kerja sensor garis.
http://
ini-robot.blogspot.com/2011/
11/sensor-garis-prinsip-kerja-sensorgaris.html [18 Feb 2012].
15. William HHJr. Rangkaian Listrik Edisi
Keenam. Wiwit Kastawan, penerjemah.
Jakarta: Erlangga; 2002. Terjemahan
dari: Engineering Circuit Analysis Sixth
Edition.
16. Sumardi. Rangkaian op-amp dalam
http://www.elektro.
instrumentasi.
undip.ac.id/sumardi/www/komponen/2_
5.htm [23 Feb 2012].
17. Bolton W. Mechatronics Electronic
Control
Systems
in
Mechanical
Engineering. London: Longman; 1995.
18. Budiharto W. Robotika Teori dan
Implementasi. Yogyakarta: ANDI; 2010.
19. [Texas Instruments Inc.]. L293, L293D
quadruple half-H drivers. Dallas: Texas
Instruments Inc; 2004.
20. Milan J, Lauhon L, Allen J.
Photoconductivity of semiconducting
CdS nanowires. Spring 2005; 2:43-47.
21. Omar MA. Elementary Solid State
Physics. Addison Wesley Publishing
Company; 1993.
22. Hartati W, Suprijadi. Pengembangan
model pengukuran intensitas cahaya
dalam fotometri. J. Oto. Ktrl. Inst. 2010;
ISSN 2:2085-2517.
23. Syafutra H. Studi fotodioda film tipis
BST didadah Tantalum [skripsi]. Bogor:
Fakultas
Matematika
dan
Ilmu
Pengetahuan Alam, Institut Pertanian
Bogor; 2008.
21
24. [Super Bright LEDs Inc.]. Data sheet
high power infrared LED. Super Bright
LEDs, Incorporated; 2010.
25. [Texas Instruments]. Single supply opamp design techniques application
report. Texas Instruments, Incorporated;
1999.
26. Susilo D. 48 Jam Kupas Tuntas
Mikrokontroler MCS51 & AVR Ed ke-1.
Yogyakarta: ANDI; 2010.
27. [Anonim]. LDR dan FOTODIODA.
http://www.bedhoel.net/2011/06/
ldrdan-photodioda.html [1 Agust 2012].
LAMPIRAN
23
Lampiran 1 Pemrograman robot pengikut garis
/*****************************************************
Project : Robot Pengikut Garis Berbasis ATMega16 dengan
Sensor LiTaO3 Berbantukan LDR
Date
: 4/22/2012
Author : Ari Widjonarko
Company : Fisika IPB
Chip type
: ATmega16
Program type
: Application
Clock frequency
: 11.059200 MHz
Memory model
: Small
External RAM size
: 0
Data Stack size
: 256
*****************************************************/
#include <mega16.h>
#include <delay.h>
void stop(void)
{
PORTC.0=1;
PORTC.1=1;
PORTC.6=1;
PORTC.7=1;
delay_us(100);
}
void maju(void)
{
PORTC.0=0;
PORTC.1=1;
PORTC.6=1;
PORTC.7=0;
delay_us(100);
stop();
}
void putar_balik(void)
{
PORTC.0=0;
PORTC.1=1;
PORTC.6=0;
PORTC.7=1;
delay_us(100);
stop();
}
void belok_kanan(void)
{
PORTC.0=0;
PORTC.1=1;
PORTC.6=1;
24
Lanjutan Lampiran 1
PORTC.7=1;
delay_us(100);
stop();
}
void belok_kiri(void)
{
PORTC.0=1;
PORTC.1=1;
PORTC.6=1;
PORTC.7=0;
delay_us(100);
stop();
}
void main(void)
{
PORTA=0x00;
DDRA=0x00;
PORTC=0x00;
DDRC=0xFF;
TCCR0=0x00;
TCNT0=0x00;
OCR0=0x00;
TCCR1A=0x00;
TCCR1B=0x00;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
MCUCR=0x00;
MCUCSR=0x00;
TIMSK=0x00;
ACSR=0x80;
SFIOR=0x00;
25
Lanjutan Lampiran 1
while (1)
{ if ((PINA.1 == 1) && (PINA.0==1) &&
{ putar_balik(); delay_us(1000);}
else if ((PINA.0==0) && (PINA.1==0)
{ belok_kiri(); maju();}
else if ((PINA.0==1) && (PINA.1==0)
{ belok_kanan(); maju();}
else if ((PINA.0==0) && (PINA.1==1)
{ belok_kiri(); delay_us(100);}
else if ((PINA.0==1) && (PINA.1==1)
{ belok_kanan(); delay_us(100);}
else if ((PINA.0==1) && (PINA.1==0)
{ maju() ;}
};
}
(PINA.2==1))
&& (PINA.2==1))
&& (PINA.2==0))
&& (PINA.2==1))
&& (PINA.2==0))
&& (PINA.2==1))
Lampiran 2 Skema rancangan robot pengikut garis secara keseluruhan
26
27
Lampiran 3 Gambar rancangan robot pengikut garis
Film LiTaO 3 .
Rangkaian regulator.
Microcontroller AVR Atmega16.
Rangkaian penguat operasional
dan driver motor DC.
Robot pengikut garis.
28
Lampiran 4 Perhitungan gain berdasarkan persamaan penguat operasional Thevenin pada
sampel 2 dan 24
1. Perhitungan pada sampel 2
Vout = mVin − b
- Pada saat terang
V in yang diperoleh menurut data sebesar 1,48 volt dan besarnya V out dari penguat
Thevenin ditentukan sebesar 3 volt.
Sehingga dapat ditulis
3 = 1,48m – b
(1)
- Pada saat gelap
V in yang diperoleh menurut data sebesar 1,05 volt dan besarnya V out dari penguat
Thevenin ditentukan sebesar 1 volt.
Sehingga dapat ditulis
1 = 1,05m – b
(2)
Dengan menggunakan metode eliminasi dan substitusi terhadap persamaan (1) dan (2)
diperoleh m = 4,65 dan b = 3,88 ≈ 4
m=
Dimana
RF +RG +R1 ||R2
; R 1 || R 2 << R G
RG +R1 ||R2
,
maka R 1 || R 2 diabaikan dan persamaan menjadi
RF +RG
4,65 R G = R F + R G
m=
RG
4,65 =
RF +RG
RG
3,65 R G = R F
R G /R F = 1/(3,65) ≈ 1/4
,
sehingga diperoleh perbandingan R G : R F = 1 : 4 (yang digunakan pada rangkaian
robot yaitu R G = 100 kohm dan R F1 ||R F2 [dimana R F1 = 1 Mohm dan R F2 = 1 Mohm] )
R2
RF
�� �
b = Vref �
R1 + R 2 R G
Pada penguat operasional ini menggunakan tegangan referensi (V ref ) sebesar 5 Volt.
4 = 5�
4
R2
�� �
R1 + R 2 1
1=
5R 2
R1 + R 2
29
Lanjutan Lampiran 4
R1 + R2 = 5 R2
R1 = 4 R2
R1
R2
=
4
1
Sehingga diperoleh perbandingan R 1 : R 2 = 4 : 1 (yang digunakan pada rangkaian
robot yaitu R 1 = 1 kohm dan R 2 = 330 ohm)
2. Perhitungan pada sampel 24
Vout = mVin − b
- Pada saat terang
V in yang diperoleh menurut data sebesar 2,54 volt dan besarnya V out dari penguat
Thevenin ditentukan sebesar 3 volt.
Sehingga dapat ditulis
3 = 2,54m – b
(1)
- Pada saat gelap
V in yang diperoleh menurut data sebesar 2,08 volt dan besarnya V out dari penguat
Thevenin ditentukan sebesar 1 volt.
Sehingga dapat ditulis
1 = 2,08m – b
(2)
Dengan menggunakan metode eliminasi dan substitusi terhadap persamaan (1) dan (2)
diperoleh m = 4,35 dan b = 8,048 ≈ 8
Dimana
m=
RF +RG +R1 ||R2
; R 1 || R 2 << R G
RG +R1 ||R2
,maka R 1 || R 2 diabaikan dan persamaan menjadi
m=
RF +RG
RG
4,35 =
4,35 R G = R F + R G
R G /R F = 1/(3,35) ≈ 1/3
RF +RG
RG
3,35 R G = R F
,
sehingga diperoleh perbandingan R G : R F = 1 : 3 (yang digunakan pada rangkaian
robot yaitu R G = 100 kohm serta R F1 = 100 kohm, R F2 = 100 kohm dan R F3 = 100
kohm dirangkai secara seri)
R2
RF
�� �
b = Vref �
R1 + R 2 R G
Pada penguat operasional ini menggunakan tegangan referensi (V ref ) sebesar 5 volt.
8 = 5�
R2
3
�� �
R1 + R 2 1
30
Lanjutan Lampiran 4
8R 1 + 8R 2 = 15R 2
8=
15R 2
R1 + R 2
8R 1 = 7R 2
R1
R2
=
7
8
,
sehingga diperoleh perbandingan R 1 : R 2 = 7 : 8 (yang digunakan pada rangkaian robot
yaitu R 1 = 330 ohm dan R 2 = 470 ohm)
3. Perhitungan Vin maksimum rangkaian Thevenin
- Pada sampel 2
m=
RF +RG +R1 ||R2
m=
500 kohm +100 kohm
; R 1 || R 2 << R G
RG +R1 ||R2
b = Vref �
100 kohm
=6
R2
RF
�� �
R1 + R 2 R G
b = 5 volt �
b = 6,20 volt
0,33 kohm
500 kohm
��
�
1 kohm + 0,33 kohm 100 kohm
karena
Vout = mVin − b
maka persamaannya menjadi
Vout = 6Vin − 6,20
Sehingga diperoleh V in maksimum
V in maks =
Vout maks + 6,20 volt
- Pada sampel 24
m=
m=
6
RF +RG +R1 ||R2
RG +R1 ||R2
300 kohm +100 kohm
b = Vref �
100 kohm
R2
RF
�� �
R1 + R 2 R G
b = 5 volt �
b = 8,81 volt
=
5 volt + 6,20 volt
6
= 1,87 volt
; R 1 || R 2 << R G
=4
0,47 kohm
300 kohm
��
�
0,33 kohm + 0,47 kohm 100 kohm
31
Lanjutan Lampiran 4
karena
Vout = mVin − b
maka persamaannya menjadi
Vout = 4Vin − 8,81
Sehingga diperoleh V in maksimum
V in maks =
Vout maks + 8,81 volt
4
=
5 volt + 8,81 volt
4
=3,45 volt