analisis sistem teknik - elista:.
advertisement

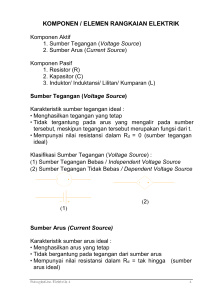
ANALISIS SISTEM TEKNIK Materi : 1. Pendahuluan 2. Pandangan singkat system 3. Dasar Model System 4. System Tanggapan Dinamis 5. Analogi element-element listrik dan Mekanis 6. Dasar penggunaan Transformasi Laplace 7. Dasar sistem Diagram Blok 8. Diagram Aliran Sinyal 9. Penggunaan rumus penguatan Masson’s 10. Kestabilan Referensi : 1. Bolton W, Mechatronics Electronic Control Systems In Mechanbical Enginering 2. Donal G Schultz and James L Melsa, State Function and Linear Control System, Mc Graw- Hill. 3. Distefano J.J.dkk, 1984, Sistem Pemgendalian dan Umpan Balik, Seri buku Schaum, Erlangga, Jakarta. 4. Friedland Bernard, 1987, Control System Design, McGraw-Hill Book Company 5. Gene. H, Hosteter., dkk, 1982, Design of Feedbaces control systems, Holt Saunders International 6. Jamshidi M, Malek Z, 1986, Linear Control System A Computer-aided Approach, Pergamon Press. 7. Nagrath I.J, M Gopal, Control Systems engineering Second Edition, John Wiley & Sons 8. Nagrath I.J, M Gopal, Systems Modelling and Analysis, Tata McGraw-Hill Publishing Company Limited, New Delhi. 9. Raven, Francis H, 1995, Automatic Control Engineering Fifth Edition, McGrawHill Intrernationan Editins 10. Richard C. Dorf, 1983, Sistem Pengaturan,Erlangga, Jakarta 11. Doyle, J . C ., Francis, B . A. und Tannenbaum, A. R. : Feedback control theory, Macmillan publishing company, 1992. 12. Follinger, O. Regelungstechnik, Huthig, 1991. 13. Kuhlenkamp, A Regelkreis und Regelstrecke, Deutsche Verlags Anstalt, 1965. 14. Leonhard, W Einfuhrung in die regelungstechnik, Vieweg, 1987. 15. Leonhard, W. Regelung in der elektrischen Energieversorgung, Teubner Studienbucher, 1980. 16. Maciejowski, J. M.: Multivariable feedback design, Addison wesley Publishing Company,1989. 17. Nagrath, I J and Gopal, M: Control Systems Engineering, Second edition, Wiley Eastern Limited, 1982. 1 18. Pestel, Eduard and Kollmann, Eckhard: Grundlagen der Regelungstechnik, Friedr. Vieweg & Sohn, 1961. 19. Reuter, Manfred: Regelungstechnik fur Ingenieure, Friedr. Vieweg & Sohn, 1981. 20. Shahian, B. and Hassul, M.: control system using Matlab, Prentice Hall, 1993. Pendahuluan Kontrol automatic telah memegang peranan yang sangat penting, dalam perkembangan ilmu dan teknologi seperti perkembangan pada pengaturan pesawat ruang angkasa; peluru kendali; system pengendali pesawat. Begitu pula system pengaturan telah menjadi bagian yang penting dan terpadu dalam proses-proses pada industri modern missal: 1. Sebagai pengontrol tekanan 2. Sebagai pengontrol temperature 3. Sebgai pengontrol kelembaban 4. Sistem aliran dalam proses industri Kegiatan pengontrolan dan monitoring yang biasa dilakukan manusia bisa digantikan perannya dengan menerapkan prinsip otomasi. Kegiatan kontrol yang dilakukan secara berulang-ulang, kekurang-presisi-an manusia dalam membaca data, serta resiko yang mungkin timbul dari sistem yang dikontrol semakin menguatkan kedudukan alat/mesin untuk melakukan pengontrolan secara otomatis. Piranti-piranti pengontrol otomatis ini sangat berguna bagi manusia. Apalagi jika ditambah dengan suatu kecerdasan melalui program yang ditanamkan dalam sistem tersebut akan semakin meringankan tugas-tugas manusia. Akan tetapi secerdas apapun sebuah mesin tentu masih membutuhkan peranan manusia untuk mengatur dan mengontrol piranti-piranti ini. Otomasi kontrol bukan untuk menggantikan sepenuhnya peranan manusia, tetapi mengurangi peranan dan meringankan tugas-tugas manusia dalam pengontrolan suatu proses. Dengan adanya perkembangan teknologi, maka mata kuliah Analisis Teknik Kendali (control automatic) memberikan kemudahan dalam : 1. 2. 3. 4. Sistem Mendapatkan performansi dari sistem Dinamik, Dapat mempertinggi kualitas produksi Menurunkan biaya produksi, Mempertinggi laju produksi, 2 5. Dan meniadakan pekerjaan- pekerjaan rutin yang membosankan, yang harus dilakukan oleh manusia. Sejarah Perkembangan Teknik Kendali : Perkembangan teknik kendali begitu sangat pesat dimulai dari : 1. Karya pertama dimulai abad 18, control automatic, governor sentrifugal, sebagai pengatur kecepatan mesin uap oleh James Watt 2. Pada tahun 1922, control automatic pengemudi kapal laut oleh Minosky 3. Pada tahun 1932, Kestablilan system loop tertutupdan terbuka terhadap masukkan tunak( steady state ) sinusoidal 4. Pada tahun 1934, Diperkenalkan istilah servomekanis untuk system control posisi, dalam hal ini membicarakan desain servo mekanis relay dengan masukkan yang berubah-ubah. 5. Selama dasawarsa 40 tahun hingga 50 tahun kemudian, metoda dalam system desain system control linear berumpan balik benar-benar telah berkembang. 6. Pada tahun 1960 an, kemudian dikembangkan kedalam bentuk multimasukkan /keluaran karena kompleknya “Plant” modern dan persyaratan yang keras pada tingkat ketelitian. Didalam perkuliahan Analisis Sistem Teknik mencakup anatar alain : a. Pengertian dan Pengaturan b. Analisis dan perancangan, system khususnya system listrik. Adapun pengturan ( Control Engineering ) berkepentingan untuk mengerti dan mengatur serta mengendalikan bagian-bagian lingkungan yang disebut “ SISTEM” yang mana system tersebut mempunyai tujuan untuk menghasilkan “Produk” yang menghsilkan mempunyai “nilai ekonomis” bagi si pemakai/pengguna. Teknik pengaturan system dilaksanakan berdasarkan dari dasar-dasar teknik “umpan balik”(feedback) dan analisis system secara linear. Maka dengan mencakup konsep-konsep teori jaringan (Network theori) akan mendapatkan suatu analisis system pengaturan dan pengendalian pada hasil keluaran (output) yang dikehendaki. Dengan demikian didalam permasalahan “Analisis Sistem Teknik” akan dibahas masalah: System dan model system, juga perumusan matematis system yang ditinjau dan serta cara penyelesaiannya. Untuk teknik umpan balik (feedback ) adalah merupakan salah satu proses paling dasar dan hamper terdapat di semua system dinamik antara lain : - Hal-hal yang berkaitan dengan diri manusia Hubungan antara manusia dengan mesin-mesin Peralatan-peralatan yang saling menunjang. 3 Sehingga akibat teori system pengendalian umpan-balik akan terus berkembang sebagai suatu disiplin ilmu tertentu, dan akan berguna untuk menganalisa dan merancang system pengendalian secara praktis piranti teknologi lainnya. Agar supaya dapat memahammmi dalam hal tersebut diatas maka diperlukan pengertian pengetahuan dasar-dasar ilmu antara lain: Dasar-dasar ilmu fisika Dasar-dasar kalkulus Dasar-dasar matematika Komponen-komponen listrik dan mekanis serta wataknya. Sehingga alat matematis yang diperlukan meliputi berbagai tofik yang antara lain: Penyelesaian permaslahan dengan persamaan deferensial dan integral Transformasi Laplace dan variable-variable kompleks. # Sistem pengendalian digolongkan menjadi 2 yaitu : 1. Sistem Pengendalian “Untai Terbuka” (Open loop system ), adalah sustu system yang tindakan pengendaliannya bebas dari keluarannya. Keunggulannya: - Konstruksinya sederhana - Lebih murah dari system tertutup - Tidak ada masalah dengan ketidak stabilan - Ketelitian kerjanya ditentukan oleh kaliberasi Kelemahannya: - Gangguan dan perubahan kalinberasi, akan menimbulkan kesalahan, sehingga keluaran tidak seperti yang dikehendaki. - Untuk menjaga kualitas yang diperlukan pada keluaran diperlukan kaliberasi ulang pada setiap waktu tertentu. 2. Sistem Pengendalian “Untai Tertutup”(Closed Loop System ), adalah suatu system yang tindakan pengendalianya tergantung pada keluarannya. Ciri-cirinya antara lain: - Mampu untukmeningkatkan ketelitian, sehingga dapat terus menghasilkan kembali inputnya. - Dapat mengurangi kepekaan perbandingan keluarran terhadap masukkan untuk perubahan cirri-ciri system. - Mengurangi akibat ketiklinearan dan distorsi. Sehingga system adalah kombinasi dari beberapa komponen yang bekerja bersama-sama dan dapat menjalannkan tugas-tugas tertentu antara lain: - Sistem Elektris - Sistem Mekanis - Sistem Thermis 4 - Sistem Biologis Sistem Kehidupan sehari-hari manusia Dll. Dengan demikian system pengendalian atau (feetback control system): yaitu suatu system dimana harga sesaat dari output, selalu dinilai dan dibandingkan dengan input, dengan demikian akan menghasilkan output yang dikehendaki. Akibat, Dengan demikian input dikurangi “Output” akan menghasilakn sinyal penggerak akan mengakibatkan “Error Signal” yang mengatur system, sehingga menghasilkan Output yang diinginkan. Secara Umum Blok Diagramnya adalah : GANGGUAN INPUT OUTPUT PROSES "PLANT" PENGONTROL ELEMENT PENGUKUR Input ( Masukkan ) : Rangsangan atau perangsangan yang diterapkan ke suatu system pengendalian dari sumber energi, biasanya agar menghasilkan tanggapan tertentu dari system yang dikendalikan. Output (keluaran) : Tanggapan sebenarnya yang diperoleh daari sebuah system pengendalian. Plant ( Proses ) : Seperangkat peralatan yang terdiri dari atau sebagian mesin yang bekerja secara bersama-sama dan digunakan untuk suatu “ Proses” Proses : Merupakan suatu bagian operasi atau perkembangan alamiah, yang berlangsung secara kontinyu ( Continue ), yang ditandai oleh suatu deretan perubahan kecil yang berurutan, dengan cara yang relative tetap, untuk mendapatkan suatu ahkiran yang dikehendaki. Gangguan : gangguan bila ada, memungkinkan suatu sinyal yang cendearung mempunyai pengaruh yang merugiakan pada harga keluaran system. 5 Didalam analisis biasanya digambarkan sebagaimana diagram bolk /kotak sbb: R(s) C(s) E(s) G(s + - ) H(s) Dimana : R(s) = Input Laplace transform C(s) = Output Laplace transform G(s) = Transfer function forword element H(s) = TF. Feedback element E(s) = Error sinyal Persolan-persoalan dalam system pengendalian Persolan pokok dalam analisis sitem dalam sintesa sebuah system pengendalian anatara lain : 1. Waktu gejala peralihan ( Transient period ) : yaitu setiap system pengendalian/pengaturan diharapkan mempunyaim transient time (waktu untuk gejala peralihan ) sekecil mungkin, artinya dapat proses sesingkat-singkatnya, sehingga harga keluarannya sesuai dengan yuang diinginkan. Tetapim dengan transient time yangkecil, keluaran dakan mempunyai simpangan dan atau osilasi yang besar dalam menuju harga yana lebih besar ( semakin meningkat ). 2. Waktu steady state ( setelah wahtu gejala peralihan dianggap selesai ), disini ada 2 hal yang sangat penting yaitu: a. Adanya kesalahan (steady state error ) ialah output yag sebenarnya tidak sama dengan output yang diinginkan. b. Besarnya kesalahan steady state error dari kedua system tersebut sangat dipengaruhi oleh “ type system” dan macam “input” 3. Kestabilan : Yaitu suatu system menentukan apakah system itu mempunyai besaran-besaran (terutama outputnya ) dengan harga yang sangat besar atau diluar batas-batas penilaian kita. 6 Contoh : Open Loop System Yaitu : akibat pengaruh output kepada input melalui operator ( Manusia ) S t=0 R S Input + V1 Output R2 I(t) - Pengatur Penggerak Closed loop control System: Yaitu pengaruh output ke input disebut “ feedback “ yang berarti suatu komponen keadaan tiap saat dari output (akibat) diberitaukan ke input ( penyebab ). Jadi “ Input dan output berasama-sama mengatur kerja system sampai output mencapai harga yang diinginkan. Penggerak + Input R Output Pengukur B B ( bimetal ) : yang terdiri dari dua buah keeping logam yang mempunyai koefisient expansitermal (ά ) yang berlainan dan dilekatkan menjadi satu. Dengan adanya perbedaan expansitermal tersebut, bila bimetal dipanaskan atau didinginkan akan mengalammi perubahan bentuk, atau berubah bentuk sehingga terjadi perubahan pada jari-jari tertentu. Elemen-elemen Listrik 1. Elemen Listrik Pasif : Adalah elemen listrik yang mempunyai sifat menerima/membutuhkan tegangan listrik. Resistor Capasitor Induktor 7 2. Elemen Listrik Aktif : Adalah elemen listrik yang mempunyai sifat membangkitkan atau memberikan tenaga listrik. Sumber Arus Sumber tegangan Komponen-komponen Listrik Resistor : Adalah suatu hambatan dari suatu benda sebagai penghantar atau Isolator. Besarnya hambatan (Resistansi ) dari bahan dapat dirumuskan sebagai berikut : Besarnya tahanan suatu bahan /material tergantung pada : R L A dimana : R = Besarnya Hambatan ( Ω ) ρ = Hambatan Jenis (Ωm ) L = Panjang bahan ( m ) A = Luas penampang ( mm2 ) Hambatan yang sengaja dibuat untuk tujuan tertentu misalnya, akan dipakai untuk membatasi arus yang akan mengalir sehingga memberikan tegangan tertentu : Maka dapat dikatakan sebagai penghantar ( Konduktor ): karena mempunyai nilai tahanan yang rendah. Seperti - Logam - Logam Campuran - Larutan asam - Dll Disebut sebagai Isolator karena mempunyai hambatan isolasi yang tinggi Misal : Mika, gelas, Karet, PVC Sedangkan Hubungan Tahnan ( R ) dengan temperature ( T ) adalah : R Rt1 naik R0 ά t C 234,5 C ? tC t1 Rt1 R0 1 .t Sudut Linear selalu sama pada Umumnya, bila temperature Nilai tahnan ( R ) juga ikut naik.Apabila kenaikkannya linear, maka hubungan antara R dan T dimana : R0 = Tahanan pada 00C Rt = Tahanan pada t0C T = Temperature 8 ά = Koefisien suhu tahanan R R2 R0 R2 R11 (t2 t1 ) ά2 R1 ά1 t C 234,5 C t2 ? tC t1 R1 R0 1 0 t1 R2 R0 1 0 t 2 .................... R2 R0 1 0 t 2 1 1 0 t 2 1 0 t 2 R1 R0 1 0 t1 R2 R0 1 0 t 2 1 1 0 t2 1 0 t2 R1 R0 1 0 t1 = 1 0 t 2 1 0 t 2 1 = 1 0 t1 0 t 2 0 t1 t 2 2 R2 (1 t1 t 2 ).... 1 t 2 t1 R 2 R 1 1 αt 2 t 1 .....terbukti R1 Sumber Arus dan Tegangan Didalam elemen listrik aktip dapat dikatakan sebagai sumber arus atau sumber tenaga, tetapi untuk penekanan terhadap waktu yang panjang, apakah tegangan atau arus yang konstan. Untuk sumber Arus, berarti untuk waktu yang lama di,ana besarnya arus dapat dikatakan konstan. I = sumber arus DC I(t) = sumber arus AC 9 Untuk sumber tegangan, dimana dapat konstan : V(dc) Фm Фm Emax + V(AC) V(dc) E t t=0 π 2π Emin t Contoh Soal : S t=0 R1 + Vin I R2 Vout a. Tuliskan persamaan system “ Open loop “ untuk V0(tegangan keluaran ) sebagai fungsi dari ( Vin, R1 dan R2 ). b. Tuliskan persamaan system “ Closed loop “ untuk V0(tegangan keluaran ) sebagai fungsi dari ( Vin, Vout, R1 dan R2 ). Penyelesaian : Menurut Hukum Kirchoff I dan II Bahwa ( KCL da KVL ) a). “ OPEN LOOP” Vin V0 R2 ...... R1 R2 R2 V0 Vin ....Sehingga.memenuhi fungsi( f )Vin ,.R1 ,.R2 R1 R2 b). “CLOSED LOOP” I Vin Vout .........Sehingga Vout R2 R1 10 R2 V Vout R2 Vout R2 in Vin Vout R1 R1 R! Vout..... Memenuhi... fungsi...dari ( f )..adalah.(Vin ,Vout , R1 , R2 Besaran-besaran listrik secara umum : Besaran listrik secara umum terdiri dari beberapa komponen Komponen – komponen listrik 1. Resistansi : Secara umum fungsi dari komponen resistor adalah sebagai pengatur kuat arus yang mengalir. Nilai resistor dinyatakan dalam satuan ohm (). Resistor dilambangkan dengan huruf R, sedangkan dalam skema disimbolkan sebagai : a b Gambar 1. a. Simbol tahanan tetap b. Simbol tahanan variabel Jika resistor (R) dipasang pada tegangan (V) yang tetap, maka : a. Kuat arus I akan menjadi kecil, bila resistor R besar. b. Kuat arus I akan menjadi besar, bila resistor R kecil. maka : V t Rxit Menurut hukum ohm I bahwa : Vr ixR volt Daya yang dikeluarkan : P Vrxi (ixR) xi i xR Energi (watt detik) dw p.dt 2 dimana : watt w dw Sehingga besarnya Energi adalah : w P.dt joule 11 Macam-macam resistor : a. Resistor tetap, disebut weerstand (bahasa Belanda) yang kaki-kakinya terletak pada ujung-ujungnya dan dalam praktek dapat dipasang bolak-balik. Nilai resistor dinyatakan dengan warna gelang yang melingkar pada bagian luar resistor tersebut. Kode warna gelang diciptakan oleh perkumpulan pabrikpabrik radio Eropa dan Amerika yang bernama RMA (Radio Manufactores Association). Setiap resistor ditandai dengan 4 warna gelang, dimana warnawarna tersebut melambangkan angka-angka sebagai berikut : Hitam : 0 (nol); Coklat: 1 (satu); Merah: 2 (dua);Jingga: 3 (tiga); Kuning : 4 (empat); Hijau : 5 (lima); Biru: 6 (enam); Ungu: 7 (tujuh) Kelabu : 8 (delapan); Putih: 9 (sembilan) Warna-warna untuk toleransinya sebagai berikut : Angka Pertama Angka Kedua Emas : 5% Perak : 10% Tanpa Warna : 20% Toleransi Banyak Angka nol Gambar 2. Penunjuk Kode Warna Keterangan : Pita pertama melambangkan angka pertama. Pita kedua melambangkan angka kedua. Pita ketiga melambangkan banyaknya angka nol. Pita warna keempat melambangkan toleransi. Contoh : 1) Merah, ungu, jingga, emas ; artinya 27 K Ohm toleransi 5%. 2) Hijau, biru, coklat, emas ; artinya 560 Ohm toleransi 5%. 12 3) Jingga, putih, jingga, perak ; artinya 39 K Ohm toleransi 10%. Bila hanya terdapat tiga pita warna, sedang pita warna keempat tidak ada berarti toleransinya adalah 20%. Contoh : 1) Jingga, putih, merah ; artinya 3 K 9 Ohm toleransi 20%. 2) Hijau, biru, kuning ; artinya 360 K Ohm toleransi 20%. Jika pita warna ketiga itu emas, maka dua angka yang dilambangkan pita warna pertama dan kedua dikalikan dengan 0,1 dan bila pita warna ketiga itu perak pengalinya adalah 0,01. Contoh : 1) Coklat, hitam, emas ; artinya 1 Ohm toleransi 20%. 2) Merah, hijau, perak ; artinya 0,25 Ohm toleransi 20%. b. Variabel Resistor (VR) Adalah resistor yang nilai hambatannya dapat diubah-ubah, variabel resistor dapat digolongkan menjadi 2 macam : 1) Potensimeter, ada 2 macam : Potensio Linier, ialah potensio yang apabila kontak gesenya dipindah nilai hambatannya berubah sesuai dengan perhitungan linier. Potensio logaritmis, ialah potensio yang apabila kontak gesenya dipindah nilai hambatannya berubah sesuai dengan perhitungan logaritma. Potensiometeer kebanyakan dipergunakan sebagai alat pengatur, misal : 1. Alat pengatur suara (Volume Control) 13 2. Alat pengatur nada (Tone Control) 3. Alat pengatur nada tinggi (Treble Control) 4. Alat pengatur nada rendah (Bass Control) A 50 K Gambar 2.3 Potensiometer dan lambangnya 2) Trimmer potensio = Trimpot Cara merubah nilai hambatan pada tripot adalah dengan jalan memutar memakai obeng (drei). Gambar 2.4 Trimer Potensio dan lambangnya 2. Kapasitor Kapasitor atau biasa juga disebut Kodensator, adalah merupakan komponen elektronika yang dapat menyimpan tenaga listrik dalam waktu tertentu, tanpa disertai reaksi kimia. Kapasitor berlainan dengan aki, dimana aki juga dapat menyimpan tenaga listrik, tetapi dengan disertai reaksi kimia. Pada dasarnya kapasitor terdiri dari 2 keping penghantar (konduktor) yang disekat satu dengan yang lain. Bahan penyekat keping ini disebut Dielektrika 14 (Gambar 3.5). Berdasarkan bahan dielektikanya, maka kapasitor dibagi atas berbagai macam-maca, diantaranya : a. Kapasitor keramik : jika dielektikanya keramik b. Kapasitor kertas : jika dielektikanya kertas c. Kapasitor mika : jika dielektikanya mika d. Kapasitor elektrolit (elco) : jika dielektikanya oksida alumunium e. Kapasitor variable (varco) f. Kapasitor trimmer Dielektika Konduktor Konduktor Gambar 2.5 Dielektrika Kondensator Dari bermacam-macam kapasitor mempunyai kemampuan menyimpan tenaga listrik yang berbeda-beda. Kemampuan menyimpan tenaga listrik dari kapasitor disebut kapasitansi (C), besar muatan (Q) diukur dengan satuan coulomb. Dan kapasitor yang memperoleh muatan listrik akan mempunyai tegangan antar terminal sebesar (V) volt. Kapasitansi dapat diukur berdasarkan besar muatan yang dapat disimpan pada suatu kenaikan tegangan. C= Tegangan (V) : Vc Arus (i) : iC Q V 1 idt Juga untuk C dVc dt sehingga Vc V t 1 idt C 1 idt C 15 Maka : i dVc dVc C 1 dt dt C Permukaan kapasitor yang berhubungan biasanya berbentuk plat rata. Ukuran kapasitor bergantung pada luas plat (A), jarak antar plat (d) dan medium penyekat. Kapasitansi juga dapat diukur dengan rumus : C= A d Dimana : = o . r o = permitivitas tempat r = permitivitas relatif Besarnya Daya (P) : 1 1 2 P = Vc x i = idt = i dt c c watt Energi (w) yang tersimpan pada kapsitor dapat dihitung dengan rumus : dw Pdt Vcxi.dt VcxC dVc dt dt 1 2 Sehingga : w C VcxdVc xCxVc 2 Maka Energi mutlak = 1 C V2 2 Kapasitansi total dapat diubah dengan cara menghubungkan beberapa kapasitor secara seri atau pararel. Kapasitor total dapat dikurangi dengan cara dihubungkan secara seri dan dapat dicari dengan rumus : 1 1 1 1 ... CT C1 C 2 Cn 16 Sedangkan kapasitas total dapat ditambah dengan cara dihubungkan secara pararel dan dapat dicari dengan rumus : CT = C1 + C2 + … + Cn Satuan kapasitas dari kapasitor itu dinyatakan dalam farad. 1 farad ialah kemampuan kapasitor untuk menyimpan tenaga listrik atau mesin listrik 1 coulomb, apabila kapasitor itu diberi tegangan listrik 1 volt. Dalam praktek, dibuat satuan-satuan yang lebih kecil, yaitu : 1 mikrofarad ( fd) = 10-6 farad 1 nanofarad (nf) = 10-9 farad 1 pikofarad (pfd) = 10-12 farad Disamping untuk menyimpan tenaga atau muatan listrik, kapasitor juga dapat digunakan untuk : a. Peredam bunga api (kapasitor keramik) b. Perata denyut arus listrik (kapasitor elektrolit) c. Rangkaian resonansi dalam tuning sirkuit, atau mencari gelombang radio (kapasitor variable) d. Menggeser gelombang atau menepatkan frekuensi (kapasitor trimmer) 3. Transformator Transformator atau biasa disebut dengan trafo adalah alat untuk mengubah tegangan bolak-balik menjadi lebih tinggi atau lebih rendah dan digunakan untuk memindahkan energi dari suatu rangkaian listrik ke rangkaian berikutnya tanpa merubah frekuensi. Dalam aplikasinya trafo dapat dibedakan menjadi 2 macam yaitu : 17 1. Transformator Step-Up atau tranformator penaik tegangan adalah tranformator yang digunakan untuk menaikkan tegangan dari rendah ke tegangan yang lebih tinggi. 2. Transformator Step-Down atau transformator penurun tegangan adalah transformator yang digunakan untuk menurunkan tegangan dari tinggi ke tegangan yan lebih rendah. Cara kerja transformator adalah sebagai berikut : 1. Jika kumparan primer dihubungkan dengan sumber tegangan arus AC, maka pada kumparan primer timbul garis-garis gaya magnet yang berubah-ubah. 2. Perubahan garis-garis gaya dari kumparan primer ini menginduksi kumparan sekunder sehingga pada kumparan sekunder timbul arus bolak-balik. Dengan memilih jumlah lilitan yang sesuai untuk tiap kumparan dapat dihasilkan GGL kumparan sekunder yang berbeda dengan GGL kumparan primer. Hubungan GGL atau tegangan primer (Vp) tegangan sekunder (Vs), jumlah lilitan kumparan primer (np) dan jumlah lilitan kumparan sekunder (ns) dapat dinyatakan dengan rumus : Tegangan primer Jumlah lilitan primer Tegangan sekunder Jumlah lilitan sekunder Vp np Vs ns yang biasa disebut dengan perbandingan transformasi. Dengan memperhatikan perbandingan transformasi kita dapat mengetahui jenis dari transformator tersebut apakah trafo Step-Up atau Step-Down. Pada transformator terdiri dari banyak belitan, sehinga dapat dipandang sebagai Induktor, dengan demikian dapat diuraikan sebagai berikut : 18 dit 1 di t xVl.dt dt L menyatakan sebagai fungsi waktu (t) menyatakan panjang lilitan (H) Induktor mempunyai tegangan (V) : V t L Dimana : ( i) (L) Sehingga besarnya arus adalah i 1 VL.dt L Besarnya daya (P) : P VLxi maka PL di di xi = Lxi dt dt watt Energi yang tersimpan (w) : dw Pdt maka w p.dt Sehingga : w Lxi di 1 2 dt L i.di maka (Energi) adalah W xLx i joule dt 2 19