Uploaded by
common.user47302
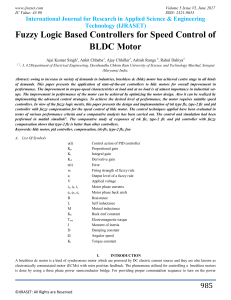
Real-coded GA and Fuzzy Logic for PID Tuning in AVR Systems
advertisement

See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/224560544 Real-coded genetic algorithm and fuzzy logic approach for real-time tuning of proportional-integral - derivative controller in automatic voltage regulator system Article in IET Generation Transmission & Distribution · August 2009 DOI: 10.1049/iet-gtd.2008.0287 · Source: IEEE Xplore CITATIONS READS 73 4,344 2 authors, including: D. Devaraj Kalasalingam University 262 PUBLICATIONS 2,643 CITATIONS SEE PROFILE Some of the authors of this publication are also working on these related projects: Pressure sensor for harah environment View project Contribution of Facts devices for VSC-OPF problem using Non dominated sorting genetic algorithm (NSGA-II) View project All content following this page was uploaded by D. Devaraj on 08 May 2014. The user has requested enhancement of the downloaded file. www.ietdl.org Published in IET Generation, Transmission & Distribution Received on 19th June 2008 Revised on 10th February 2009 doi: 10.1049/iet-gtd.2008.0287 ISSN 1751-8687 Real-coded genetic algorithm and fuzzy logic approach for real-time tuning of proportional –integral – derivative controller in automatic voltage regulator system D. Devaraj B. Selvabala Power System Automation Laboratory, Kalasalingam University, Krishnankoil 626190, Tamilnadu, India E-mail: [email protected] Abstract: Optimal tuning of proportional – integral – derivative (PID) controller parameters is necessary for the satisfactory operation of automatic voltage regulator (AVR) system. This study presents a combined genetic algorithm (GA) and fuzzy logic approach to determine the optimal PID controller parameters in AVR system. The problem of obtaining the optimal PID controller parameters is formulated as an optimisation problem and a real-coded genetic algorithm (RGA) is applied to solve the optimisation problem. In the proposed RGA, the optimisation variables are represented as floating point numbers in the genetic population. Further, for effective genetic operation, the crossover and mutation operators which can deal directly with the floating point numbers are used. The proposed approach has resulted in PID controller with good transient response. The optimal PID gains obtained by the proposed GA for various operating conditions are used to develop the rule base of the Sugeno fuzzy system. The developed fuzzy system can give the PID parameters on-line for different operating conditions. The suitability of the proposed approach for PID controller tuning has been demonstrated through computer simulations in an AVR system. Nomenclature Kp Ki proportional gain of PID controller integral gain of PID controller Kd derivative gain of PID controller Ka Ke amplifier gain exciter gain Kg Ks generator gain sensor gain ta te tg ts DVt DVref amplifier time constant exciter time constant generator time constant sensor time constant incremental change in terminal voltage incremental change in reference voltage IET Gener. Transm. Distrib., 2009, Vol. 3, Iss. 7, pp. 641 – 649 doi: 10.1049/iet-gtd.2008.0287 Osh Ess overshoot steady-state error Ts Tr settling time rising time 1 Introduction The main objective of the automatic voltage regulator (AVR) is to control the terminal voltage by adjusting the generator exciter voltage. The AVR must keep track of the generator terminal voltage all the time and under any load condition, working in order to keep the voltage within pre-established limits. Despite significant studies in the development of advanced control schemes, the classical proportional – integral – derivative (PID) controllers [1 – 5] remain the controllers of choice to control the AVR 641 & The Institution of Engineering and Technology 2009 Authorized licensed use limited to: Arulmigu Kalasalingam College of Engineering. Downloaded on August 20, 2009 at 05:01 from IEEE Xplore. Restrictions apply. www.ietdl.org because of its simple structure and robustness to variations of the system parameters. applied to obtain the optimal PID parameters of an AVR system. Proper selection of the PID controller parameters is necessary for the satisfactory operation of the AVR. Traditionally, the PID controller parameters are evaluated using Ziegler–Nichols (ZN) [1, 2] and Cohen Coon methods [6, 7]. In both these methods, the parameters of the controller are obtained for an operating point where the model can be considered linear. This implies that there is sub-optimal tuning when a process operates outside the validity zone of the model. Internal model control [8] overcomes the above said problem but its design calculations could be complicated for higher order process. 2 Modelling of automatic voltage regulator system Alternatively, numerical optimisation techniques like gradient descent technique can be applied to obtain the parameters of the PID controllers. They are computationally fast, but with a non-monotonic solution surface these methods are highly sensitive to starting points and frequently converge to local optimum solutions or diverge altogether. In [9], an optimal PID controller for a general second-order system has been developed using linear-quadratic regulator (LQR) technique. This approach requires the proper selection of weighting functions for satisfactory performance. Recently, evolutionary computation techniques such as genetic algorithm (GA) [10–13] and particle swarm optimisation [14] have been applied to obtain the optimal controller parameters. GA is a global search algorithm based on the principle of ‘survival of the fittest’. Devaraj et al. [12] proposed an enhanced genetic algorithm (GA) for PI controller tuning in pH process. A hybrid GA and bactorial foraging approach was proposed in [13] to tune the PID controller of an AVR. Gaing [14] has proposed a novel design method for determining the PID controller parameters of the AVR system using the particle swarm optimisation (PSO) method. PSO is a population-based optimisation algorithm which is inspired by social behaviour patterns of organisms such as bird flocking and fish schooling. Both GA and PSO suffer from computational burden and memory requirement and so they are not suitable for on-line applications. To overcome the above difficulties, this paper proposes Sugeno fuzzy model [15] for on-line tuning of PID controller. The optimal PID parameters required to formulate the fuzzy rule table are generated by employing the real-coded genetic algorithm (RGA). In the RGA, the optimisation variables are represented as floating point numbers instead of the binary string which is followed in the conventional binary-coded GA. Further, crossover and mutation operators which can deal directly with the floating point numbers are used. The proposed approach is In a synchronous generator, the terminal voltage is maintained constant at various levels by using an AVR. The AVR system consists of four major components, namely amplifier, exciter, generator and sensor. Fig. 1 illustrates the block diagram representation of the AVR system. The transfer functions of the individual components are given in Table 1 along with the limits of the parameters. An increase in the reactive power load of the generator is accompanied by a drop in the terminal voltage magnitude. The voltage magnitude is sensed by a sensor. This voltage is compared with a dc set point signal to generate the error signal. A PID controller is used to reduce the error and to improve the dynamic response. The PID controller is a combination of the proportional, integral and derivative control mechanisms that when used together effectively stabilise the manipulated variable at the set point. The PID controller transfer function is given by G(s) ¼ Kp þ Ki þ Kd s s The transfer function of AVR system with PID control is given by (as shown in (2)) The AVR quality influences the voltage level during steady-state operation and also reduces the voltage oscillations during transient periods, affecting the overall system stability. 3 Optimisation of controller parameters Proper selection of PID controller parameters is necessary for the satisfactory operation of the system. In this work, the problem of PID controller parameter selection is formulated as an optimisation problem, the objective function of which is given by Min F (Kp , Ki , Kd ) ¼ (1 eb )(Osh þ Ess ) þ eb (ts tr ) (3) The above objective function uses a combination of transient response including rise time, overshoot, settling time and steady-state error. By selecting the proper value of the weighting factor b, the performance criterion can be made to satisfy the designer requirements. The above optimisation (s2 Kd þ sKp þ Ki )(Ka Ke Kg )(1 þ sts ) DVt (s) ¼ DVref (s) s(1 þ sta )(1 þ ste )(1 þ stg )(1 þ sts ) þ (Ka Ke Kg Ks )(s2 Kd þ sKp þ Ki ) 642 & The Institution of Engineering and Technology 2009 (1) (2) IET Gener. Transm. Distrib., 2009, Vol. 3, Iss. 7, pp. 641– 649 doi: 10.1049/iet-gtd.2008.0287 Authorized licensed use limited to: Arulmigu Kalasalingam College of Engineering. Downloaded on August 20, 2009 at 05:01 from IEEE Xplore. Restrictions apply. www.ietdl.org Figure 1 Block diagram of AVR system along with PID controller problem is subjected to the following constraints 4.1 Reproduction Kpmin Kp Kpmax Kimin Ki Kimax (4) Kdmin Kd Kdmax A RGA is applied to the above optimisation problem to search for the optimum value of the controller parameters. The details of the proposed GA are given in the next section. 4 Proposed GA GAs [16] are search algorithms based on the mechanics of natural selection and genetics. They combine solution evaluation with randomised, structured exchange of information between solutions to obtain optimality. Starting with an initial population, the GA exploits the information contained in the present population and explores new individuals by generating offspring using the three genetic operators namely, reproduction, crossover and mutation which can then replace the members of the old generation. After several generations, the algorithm converges to the best chromosome, which hopefully represents the optimum or near optimal solution. In the traditional binary-coded GA, the decision variables of the problem are represented by a fixed-length string of binary bits (0, 1). In this representation, the resolution of the solution depends on the number of bits used to represent the variables. Further, the coding of real-valued variables in finite-length strings causes a number of difficulties. To overcome these difficulties, in this paper, the decision variables are represented in their natural form. Also, crossover and mutation operators which can operate directly with floating point numbers are used. The details of the genetic operators used in the proposed GA are given below. Reproduction is a method that stochastically selects the individuals from the population according to their fitness; higher the fitness, more chance an individual has to be selected for the next generation. There are three main types of selection methods: fitness proportionate selection, ranking method and tournament selection. Tournament selection [17] is used in this work. In tournament selection, ‘n’ individuals are selected randomly from the population, and the best of the ‘n’ is inserted into the new population for further genetic processing. This procedure is repeated until the mating pool is filled. Tournaments are often held between pairs of individuals, although larger tournaments can be used. 4.2 Crossover operation The crossover operator is mainly responsible for the global search property of the GA. Crossover basically combines substructures of two parent chromosomes to produce new structures, with the selected probability typically in the range of 0.6– 1.0. The Blend crossover operator (BLX-a) [17] is applied in this work. Fig. 2 illustrates the BLX-a crossover operation for the one-dimensional case. In the BLX-a crossover, the off spring y is sampled from the space [e1 , e2] as follows y¼ where where e1 þ r(e2 e1 ) repeat sampling if umin y umax otherwise (5) e1 ¼ u1 a(u2 u1 ) (6) e2 ¼ u2 þ a(u2 u1 ) (7) r is the uniform random number [ [0, 1]. Table 1 Transfer function of AVR components Component amplifier exciter generator sensor Transfer function Parameter limits TFamplifier ¼ Ka/1 þ tas 10 , Ka , 40; 0.02 s , ta , 1 s TFexciter ¼ Ke/1 þ tes 1 , Ke , 10; 0.4 s , te ,1 s TFgenerator ¼ Kg/1 þ tgs Kg depends on load (0.7 – 1.0); 1 s , tg ,2 s TFsensor ¼ Ks/1 þ tss 0.001 s , ts , 0.06 s IET Gener. Transm. Distrib., 2009, Vol. 3, Iss. 7, pp. 641 – 649 doi: 10.1049/iet-gtd.2008.0287 643 & The Institution of Engineering and Technology 2009 Authorized licensed use limited to: Arulmigu Kalasalingam College of Engineering. Downloaded on August 20, 2009 at 05:01 from IEEE Xplore. Restrictions apply. www.ietdl.org Figure 2 Schematic representation of BLX-a crossover It is to be noted that e1 and e2 will lie between umin and umax , the variable’s lower and upper bounds, respectively. In a number of test problems, it was observed that a ¼ 0.5 provides good results. One interesting feature of this type of crossover operator is that the created point depends on the location of both parents. If both parents are close to each other, the new point will also be close to the parents. On the other hand, if parents are far from each other, the search is more like a random search. 4.3 Mutation operation The mutation operator is used to inject new genetic material into the population. Mutation randomly alters a variable with a small probability. ‘Uniform mutation’ operator is used in this work. In uniform mutation, the variable is set to a uniform random number between the variable’s lower and upper limits. 5 GA implementation for PID controller tuning While applying GA to obtain the optimal PID controller parameters, two main issues need to be addressed: † representation of the decision variables and † formation of the fitness function. 5.1 Variable representation Each individual in the genetic population represents a candidate solution. For the PID controller tuning problem, the elements of the solution consist of proportional gain (Kp), integral gain (Ki) and derivative gain (Kd). These variables are represented as floating point numbers in the proposed GA population. With floating point representation, an individual in the GA population for computing the optimal PID gains will look like the following 0:937 |fflffl{zfflffl} Kp 0:242 |fflffl{zfflffl} Ki 0:320 |fflffl{zfflffl} Kd With the direct representation of the solution variables, the computer space required to store the population is reduced. Moreover, the efficiency of the GA is increased as there is no need to convert the solution variables to the binary string. 644 & The Institution of Engineering and Technology 2009 5.2 Fitness function The performance of each individual in the population is evaluated according to its ‘fitness’, which is defined as the non-negative figure of merit to be maximised. It is associated directly with the objective function value. Evaluation of the individual is accomplished by calculating the performance criteria given by (3) for the problem using the parameter set. The result of the performance criteria calculation is used to calculate the fitness value of the individual. The fitness function is the reciprocal of the performance criterion F(Kp ,Ki ,Kd) given in (3). Hence, the minimisation of performance criteria given by (3) is transformed to a fitness function to be maximised as Fitness ¼ k F (Kp , Ki , Kd ) (8) where k is a constant. This is used to amplify (1/F ), the value of which is usually small, so that the fitness value of the chromosome will be in a wider range. 6 Review of Sugeno fuzzy model Fuzzy logic was first developed by Zadeh in the mid-1960s to provide a mathematical basis for human reasoning. Fuzzy logic [15] uses fuzzy set theory, in which a variable is a member of one or more sets, with a specified degree of membership. The degree of membership in a set is expressed by a number between 0 and 1. 0 means entirely not in the set, 1 means completely in the set, and a number in between means partially in the set. Mathematically, a fuzzy set A in the universe of discourse X is defined to be a set of ordered pairs A ¼ {(x, mA (x))jx [ X } (9) where mA(x) is called the membership function of x in A. The parameterisable membership functions most commonly used in practice are the triangular membership function and the trapezoidal membership function. Fuzzy logic when applied to computers allows them to emulate the human reasoning process, quantify imprecise information, make decisions based on vague and incomplete data, yet by applying a ‘defuzzification’ process, arrive at definite conclusions. There are three main types of fuzzy logic systems, namely, Mamdani, Sugeno and Tsukamoto fuzzy logic systems. In IET Gener. Transm. Distrib., 2009, Vol. 3, Iss. 7, pp. 641– 649 doi: 10.1049/iet-gtd.2008.0287 Authorized licensed use limited to: Arulmigu Kalasalingam College of Engineering. Downloaded on August 20, 2009 at 05:01 from IEEE Xplore. Restrictions apply. www.ietdl.org the Sugeno fuzzy model, which is followed in this work, the fuzzy rule is expressed as If x is A and y is B then z ¼ f (x, y) (10) where x and y are input variables, A and B are fuzzy sets in the antecedent and f (x, y) is a crisp function in the consequent. The fuzzy sets of each variable are described by appropriate membership functions. A set of such rules form the heart of the fuzzy logic system. For a specific input signal condition, the fuzzy system determines the rules to be fired and then computes the effective output. For this, first the minimum of the membership functions of the inputs (wi) is obtained for each of the rules. This value is the firing value for a particular rule. Then the overall output is determined by weighted average of individual rule outputs given by PM wi zi z ¼ Pi¼1 M i¼1 wi (11) In the present work, the Sugeno fuzzy system is used to estimate the parameters of the PID controller under various operating conditions. 7 Simulation results The proposed methodology for PID controller tuning was tested on an AVR system. The AVR system consists of amplifier, exciter, generator and sensor. The parameters of the AVR system are chosen as Ka ¼ 10, Ke ¼ Kg ¼ Ks ¼ 1.0, ta ¼ 0.1, te ¼ 0.4, ts ¼ 0.01 and tg ¼ 1.0. Only Kg and tg are load dependent. The AVR system was simulated in MATLAB Simulink. The MATLAB-Simulink model of AVR system along with PID controller is shown in Fig. 3. The PID controller was tuned using the ZN method. A step reference voltage of 0.01 p.u. is applied and the step response of change in terminal voltage of AVR system in the presence Figure 4 Step response of change in terminal voltage with ZN PID controller of PID controller is shown in Fig. 4. From the figure, it is observed that the response of the AVR system with PID controller tuned using ZN method posses more than one oscillatory mode and has large settling time. This shows that the system has not been tuned to its optimum. 7.1 Performance of RGA–PID controller Next, the proposed GA was applied to obtain the optimal PID controller parameters. The software for the proposed GA was written in MATLAB and executed on a PC with 2.4 MHZ and 256 MB RAM. Proportional gain (Kp), Integral gain (Ki) and derivative gain (Kd) are taken as the optimisation variables. They are represented as floating point numbers in the GA population. The initial population is generated randomly between the variable’s lower and upper limits. The fitness function given by (8) is used to evaluate the fitness value of each set of controller parameters. Simulation was conducted with different values of b. The performance of GA for various values of crossover and mutation probabilities in the ranges 0.6– 1.0 and 0.001 – 0.1, respectively, was evaluated. The best results are obtained with the following control parameters. Figure 3 MATLAB-Simulink model of AVR system along with PID controller IET Gener. Transm. Distrib., 2009, Vol. 3, Iss. 7, pp. 641 – 649 doi: 10.1049/iet-gtd.2008.0287 645 & The Institution of Engineering and Technology 2009 Authorized licensed use limited to: Arulmigu Kalasalingam College of Engineering. Downloaded on August 20, 2009 at 05:01 from IEEE Xplore. Restrictions apply. www.ietdl.org Number of generations: 50 population size: 30 crossover probability: 0.8 mutation probability: 0.05 The proposed GA took 72 s to reach the optimal solution. Fig. 5 shows the convergence characteristics of GA algorithm. It can be seen that the fitness value increases rapidly in the first 15 generations of the GA. During this stage, the GA concentrates mainly on finding feasible solutions to the problem. Then the value increases slowly and settles down near the optimum value with most of the individuals in the population reaching that point. Figure 6 Step response of RGA – PID change in terminal voltage Table 3. The terminal voltage responses with these methods are also given in Fig. 6. On comparing these results, it is found that the proposed GA approach has resulted in minimum values of rise time, settling time and overshoot are less when compared with the results obtained using LQR method and binary-coded GA. In addition, the steady-state error with RGA – PID is low compared to other two methods. Also the proposed algorithm took less time for convergence compared to the binary-coded GA. The optimal values of the controller parameters obtained using the proposed GA for different values of b are given in Table 2. The time-domain performance indices of the system, namely rise time, settling time, steady-state error and overshoot are also given in Table 2. The system response with optimal values of PID parameters is given in Fig. 6. The transient response of the AVR system has improved significantly and the response is faster than the one shown in Fig. 4. These results show that the proposed approach is able to search the optimal values of the PID controller. To analyse the performance of the AVR system under severe disturbances, a three phase fault is applied at the generator terminal and the response of the system was observed. Fig. 7 shows the system response for the above contingency with PID controller tuned using the RGA. It can be observed that the controller is able to suppress the oscillations in the terminal voltage and provide good damping characteristics. For comparison, LQR technique and a binary-coded GA were applied to obtain the parameters of the PID controller. The results obtained by these methods are also given in 7.2 Development of Sugeno fuzzy model for online tuning A Sugeno fuzzy logic model was developed to obtain the optimal PID parameters during real-time operation. Kg and tg are the input to the fuzzy model and the values of Kp , Ki and Kd are the output. Four fuzzy sets, namely, ‘low (L)’, ‘medium low (ML)’, ‘medium high (MH)’ and ‘high (H)’ are defined for the variable Kg . Similarly, the fuzzy sets defined for the variable tg are ‘very low (VL)’, ‘low (L)’, ‘medium low (ML)’, ‘medium high (MH)’, ‘high (H)’ and ‘very high (VH)’. They are associated with overlapping triangular membership functions. To formulate the fuzzy rule table the value of Kg is varied from 0.7 to 1.0 in steps of 0.1 and tg is varied from 1 to 2 in steps Figure 5 Convergence characteristics of the RGA Table 2 Optimal PID gains and transient response parameters Kp Ki Kd Ts(s) Tr(s) Osh Ess(1025) 0.5 1.000 0.1448 0.7019 2.5595 1.9511 0.0158 46.911 1.0 1.000 0.1448 0.7019 2.5595 1.9511 0.0158 46.911 1.5 0.682 0.266 0.179 1.2682 1.0668 0.0004 b 646 & The Institution of Engineering and Technology 2009 4.3386 IET Gener. Transm. Distrib., 2009, Vol. 3, Iss. 7, pp. 641– 649 doi: 10.1049/iet-gtd.2008.0287 Authorized licensed use limited to: Arulmigu Kalasalingam College of Engineering. Downloaded on August 20, 2009 at 05:01 from IEEE Xplore. Restrictions apply. www.ietdl.org Table 3 Comparison of PID gains and transient response parameters Method Ki Kp Kd Ts(s) Tr(s) Osh Ess(1025) 15.007 LQR 1.01 0.5 0.1 2.3354 0.5004 0.3605 GA 0.5692 0.2484 0.1258 1.7019 0.8093 0.0586 8.2941 RGA 0.682 0.266 0.179 1.2682 1.0668 0.0004 4.3386 Figure 7 Terminal voltage response under three phase fault of 0.2. For each combination of Kg and tg, , the proposed GA is applied to obtain the optimal values of Kp , Ki and Kd. The fuzzy rule table formulated for Kp , Ki and Kd using the above approach is given in Table 4 as (a), (b) and (c), respectively. During real-time operation, corresponding to the present operating condition, the values of Kg and tg are found out. For this value of Kg and tg , the optimal values of Kp , Ki and Kd can be computed using the fuzzy rule table and the Sugeno inference system explained in Section 5. The optimal gains and transient response parameters obtained using the Sugeno model for a new set of operating condition (off-nominal) are given in Table 5. To validate the results obtained by the fuzzy model, RGA was applied for the same values of Kg and tg and the results are given in Table 6. From the table, it is observed that the values of controller parameters obtained are almost same in all cases. Fig. 8 shows the response of the system with PID controller values obtained using the fuzzy model and RGA for Kg ¼ 0.77 and tg ¼ 1.5. From the figure, it is observed that the terminal voltage response is similar in both cases. This demonstrates the suitability of the proposed approach to obtain the optimal PID gains during real-time operation of the system. Table 4 Sugeno fuzzy rule table tg Very low Low Medium low Medium high High Very high 1 1.2 1.4 1.6 1.8 2 low (0.7) 0.8574 0.8574 0.7246 0.5408 0.6102 0.6102 medium low (0.8) 0.4752 0.7246 0.6848 0.7246 0.5864 0.6030 medium high (0.9) 0.5321 0.7246 0.8080 0.7379 0.5864 0.5864 high (1.0) 0.5408 0.8574 0.7246 0.7246 0.7379 0.5864 low (0.7) 0.2862 0.3601 0.3601 0.3601 0.3107 0.3107 medium low (0.8) 0.1719 0.2862 0.3601 0.3601 0.3601 0.3107 medium high (0.9) 0.1719 0.2505 0.3601 0.3601 0.3601 0.3601 high (1.0) 0.1719 0.2862 0.2862 0.3601 0.3601 0.3601 low (0.7) 0.2187 0.2078 0.1643 0.1643 0.3578 0.4207 medium low (0.8) 0.2078 0.1643 0.1643 0.1643 0.2049 0.3547 medium high (0.9) 0.1351 0.1643 0.1757 0.1643 0.1643 0.2049 high (1.0) 0.1351 0.2049 0.1643 0.1643 0.1643 0.1757 Kg (a) For proportional gain Kp (b) For integral gain Ki (c) For derivative gain Kd IET Gener. Transm. Distrib., 2009, Vol. 3, Iss. 7, pp. 641 – 649 doi: 10.1049/iet-gtd.2008.0287 647 & The Institution of Engineering and Technology 2009 Authorized licensed use limited to: Arulmigu Kalasalingam College of Engineering. Downloaded on August 20, 2009 at 05:01 from IEEE Xplore. Restrictions apply. www.ietdl.org Table 5 Optimal gains and transient parameters for off-nominal operating condition tg Kp Ki Kd Ts(s) Tr(s) Osh(1024) Ess(1025) 0.77 1.50 0.723 0.36 0.164 1.1100 0.9699 1.1670 8.7792 0.79 1.15 0.682 0.266 0.179 1.1404 0.9698 0.4262 8.4564 0.85 1.30 0.736 0.314 0.167 0.8628 0.8356 8.3670 6.2673 0.75 1.67 0.621 0.361 0.205 1.6344 1.3304 0.0109 1.5927 0.99 1.45 0.731 0.31 0.165 0.8353 0.8082 2.2541 5.3307 0.99 1.96 0.614 0.36 0.176 1.4373 0.9671 0.0051 9.7682 Kg Table 6 Optimal PID gains and transient response using RGA and SFL techniques Kg 0.77 0.79 0.85 0.75 0.99 0.99 tg Type Kp Ki Kd Ts(s) Tr(s) Osh(1024) Ess(1025) 1.50 RGA 0.7246 0.3601 0.1643 1.1960 0.8083 2.157 6.1102 SFL 0.723 0.36 0.164 1.1100 0.9699 1.1670 8.7792 RGA 0.6598 0.2927 0.1743 1.1103 0.9404 0.2889 7.5400 SFL 0.682 0.266 0.179 1.1404 0.9698 0.4262 8.4564 RGA 0.7379 0.2862 0.1643 0.9031 0.8354 6.3345 8.0084 SFL 0.736 0.314 0.167 0.8628 0.8356 8.3670 6.2673 RGA 0.6321 0.3601 0.2643 1.8021 1.0740 0.0592 2.0006 SFL 0.621 0.361 0.205 1.6344 1.3304 0.0109 1.5927 RGA 0.7080 0.3601 0.1652 0.7646 0.7646 1.960 4.8988 SFL 0.731 0.31 0.165 0.8353 0.8082 2.2541 5.3307 RGA 0.6030 0.3601 0.1757 1.4093 0.9997 0.0416 1.3932 SFL 0.614 0.36 0.176 1.4373 0.9671 0.0051 9.7682 1.15 1.30 1.67 1.45 1.96 8 Figure 8 Step response of change in terminal voltage for off-nominal values 648 & The Institution of Engineering and Technology 2009 Conclusion This paper has proposed a RGA and Sugeno fuzzy logic approach for obtaining the optimal gains of PID controller in AVR system. In this paper, the problem of discretisation in the representation of the decision variables in the binarycoded GA has been alleviated by employing floating point numbers to represent the PID parameters. Blend crossover and uniform mutation which can directly deal with the real variables have been applied. The proposed GA approach has resulted in better dynamic performance of the AVR. Further the proposed GA occupies less computer space and takes less time for convergence compared with the conventional binary-coded GA. The optimal gains produced by the GA-based approach were used to develop the Sugeno fuzzy system. The performance of the algorithm in obtaining the optimal values of PID controller parameters under various operating conditions has been IET Gener. Transm. Distrib., 2009, Vol. 3, Iss. 7, pp. 641– 649 doi: 10.1049/iet-gtd.2008.0287 Authorized licensed use limited to: Arulmigu Kalasalingam College of Engineering. Downloaded on August 20, 2009 at 05:01 from IEEE Xplore. Restrictions apply. www.ietdl.org analysed through computer simulation. The simulation result shows that the Sugeno fuzzy system can produce the optimal PID values accurately in a fraction of the second and this solves the problems associated with evolutionary computation techniques in applying to on-line application. 9 References [1] ASTROM K.J. , HANG C.C., PERSSON P. , HO W.K.: ‘Towards intelligent PID control’, Automatica, 1992, 28, (1), pp. 1 – 9 [2] ASTROM K.J., HAGGLUND T.: ‘The future of PID control’, Control Eng. Pract., 2001, 9, (11), pp. 1163– 1175 [3] LI Y., ANG K.H., CHONG G.C.Y.: ‘PID control system analysis and design, problems, remedies and future directions’, IEEE Control Syst. Mag., 2006, 26, (1), pp. 32– 41 [4] LI Y., ANG K.H., CHONG G.C.Y.: ‘Patents, software and hardware for PID control’, IEEE Control Syst. Mag., 2006, 26, (1), pp. 42–54 [5] O’DWYER A.: ‘Handbook of PI and PID controller tuning rules’ (Imperial College Press, London, 2003) [6] SCHEI T.S.: ‘Automatic tuning of PID controllers based on transfer function estimation’, Automatica, 1994, 30, (12), pp. 1983 – 1989 [7] SHINSKEY F.G. : ‘Process control system: application, design and tuning’ (McGraw-Hill, 1996, 4th edn.) [8] MORARI M. , ZUFIRIOU E.: ‘Robust process control’ (Prentice-Hall Inc., Englewood Cliffs, NJ, 1987) IET Gener. Transm. Distrib., 2009, Vol. 3, Iss. 7, pp. 641 – 649 doi: 10.1049/iet-gtd.2008.0287 [9] YU G.R. , HWANG R.C.: ‘Optimal PID speed control of brushless DC motors using LQR approach’. IEEE Int. Conf. Syst., Man Cybern., 2004, pp. 473– 478 [10] VISIOLI A.: ‘Tuning of PID controllers with fuzzy logic’, Proc. Inst. Electron. Eng. Control Theory Appl., 2001, 148, (1), pp. 1 – 8 [11] KROHLING R.A., REY J.P.: ‘Design of optimal disturbance rejection PID controllers using genetic algorithm’, IEEE Trans. Evol. Comput., 2001, 5, (1), pp. 78– 82 [12] VALARMATHI K., DEVARAJ D., RADHAKRISHNAN T.K.: ‘Enhanced genetic algorithm based proportional integral controller tuning for pH process’, Instrumen. Sci. Technol., 2007, 35, (6), pp. 619– 635 [13] KIM D.H., ABRAHAM A., CHO J.H.: ‘A hybrid genetic algorithm and bacterial foraging approach for global optimization’, Int. J. Inf. Sci., 2007, 177, (18), pp. 3918 – 3937 [14] GAING Z.L.: ‘A particle swarm optimization approach for optimum design of PID controller in AVR system’, IEEE Trans. Energy Convers., 2004, 19, (2), pp. 384– 391 [15] ROSS T.: ‘Fuzzy logic with engineering application’ (Tata McGraw Hill Inc., 1995) [16] GOLDBERG D.: ‘Genetic algorithms in search, optimization and machine learning’ (Addison-Wesley, 1989) [17] DEVARAJ D., YEGNANARAYANA B.: ‘Genetic algorithmbased optimal power flow for security enhancement’, IEE Proc. Gener., Transm. Distrib., 2005, 152, (6), pp. 899– 905 649 & The Institution of Engineering and Technology 2009 View publication stats use limited to: Arulmigu Kalasalingam College of Engineering. Downloaded on August 20, 2009 at 05:01 from IEEE Xplore. Restrictions apply. Authorized licensed