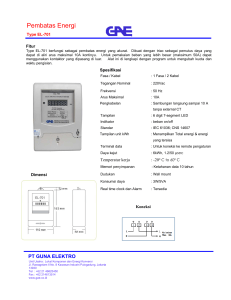
BAB III LANDASAN TEORI 3.1 Pengertian Sistem Tenaga Listrik Sistem tenaga listrik merupakan suatu sistem kelistrikan terpadu yang memiliki hubungan antara komponen satu dengan komponen lainnya sehingga sampai kepada konsumen yang membutuhkan energi listrik. Pada umumnya sistem tenaga listrik terdiri dari 3 sub sistem, yaitu: 1. Bagian Pembangkitan (Generator). 2. Bagian Penyaluran atau Transmisi tenaga listrik. 3. Bagian distribusi tenaga listrik. Tenaga listrik yang telah dihasilkan pada pusat listrik akan ditransmisikan kebeban melalui saluran transmisi. Sebelum ditransmisikan, tegangan dinaikkan menggunakan transformator penaik tegangan (step-up) pada pusat listrik. Tegangan tersebut dinaikkan kelevel tegangan tinggi (antara tegangan 70 kV sampai 150 kV) atau tegangan ekstra tinggi (diatas 150 kV). Saluran transmisi yang digunakan bisa berupa saluran udara maupun kabel tanah. Gambar 3.1. Sistem Tenaga Listrik 3.2 Motor Induksi Tiga Fasa 3.2.1 Apa Itu Motor Induksi Tiga Fasa Motor induksi adalah motor listrik arus bolak-balik (ac) yang putaran rotornya tidak sama dengan putaran medan stator, dengan kata lain putaran rotor dengan putaran medan pada stator terdapat selisih putaran yang disebut slip. 12 Motor induksi, merupakan motor yang memiliki konstruksi yang baik, harganya lebih murah dan mudah dalam pengaturan kecepatannya, stabil ketika berbeban dan mempunyai efisiensi tinggi. Mesin induksi adalah mesin ac yang paling banyak digunakan dalam industri dengan skala besar maupun kecil, dan dalam rumah tangga. Alasannya adalah bahwa karakteristiknya hampir sesusai dengan kebutuhan dunia industri, pada umumnya dalam kaitannya dengan harga, kesempurnaan, pemeliharaan, dan kestabilan kecepatan. Mesin induksi (asinkron) ini pada umumnya hanya memiliki satu suplai tenaga yang mengeksitasi belitan stator. Belitan rotornya tidak terhubung langsung dengan sumber tenaga listrik, melainkan belitan ini dieksitasi oleh induksi dari perubahan medan magnetik yang disebabkan oleh arus pada belitan stator. Hampir semua motor ac yang digunakan adalah motor induksi, terutama motor induksi tiga fasa yang paling banyak dipakai di perindustrian. Motor induksi tiga fasa sangat banyak dipakai sebagai penggerak di perindustrian karena banyak memiliki keuntungan, tetapi ada juga kelemahannya. Gambar (a) Gambar (b) Gambar 3.2. Konstruksi Motor Induksi 3 Phasa (a) rotor (b) stator. Motor bolak-balik (ac) yang putaran rotornya tidak sama dengan putaran medan stator,antara putaran rotor dengan putaran medan pada stator terdapat selisih putaran yang disebut slip Saat pengasutan motor induksi ada lonjakan arus besar berkisar lima hingga tujuh kali dari arus nominal yang terjadi dalam waktu yang sangat singkat, dan mengakibatkan jatuh tegangan sesaat (voltage dip). Fenomena seperti ini akan menyebabkan efek seperti : 13 1. Torsi yang transient akan menyebabkan stress (tekanan) pada sistem mekanisnya. 2. Menghambat percepatan putaran motor menuju putaran nominal. 3. Kegagalan kerja pada peralatan lain seperti Relai, Kontaktor dan efek lainnya. 3.2.2 Prinsip Kerja Motor Induksi tiga phasa Pada saat terminal tiga fasa stator motor induksi diberi suplai tegangan tiga fasa seimbang, maka akan mengalir arus pada konduktor di tiap belitan fasa stator dan akan menghasilkan fluksi bolak-balik . Amplitudo fluksi per fasa yang dihasilkan berubah secara sinusoidal dan menghasilkan fluks resultan (medan putar) dengan magnitud yang nilainya konstan yang berputar dengan kecepatan sinkron. Medan putar akan terinduksi melalui celah udara menghasilkan ggl induksi (ggl lawan) pada belitan fasa stator. Medan putar tersebut juga akan memotong konduktor-konduktor belitan rotor yang diam. Hal ini terjadi karena adanya perbedaan relatif antara kecepatan fluksi yang berputar dengan konduktor rotor yang diam, yang disebut juga dengan slip (s). Karena belitan rotor merupakan rangkaian tertutup, baik melalui cincin ujung (end ring) ataupun tahanan luar, maka arus akan mengalir pada konduktorkonduktor rotor. Karena konduktor-konduktor rotor yang mengalirkan arus ditempatkan di dalam daerah medan magnet yang dihasilkan stator, maka akan terbentuklah gaya mekanik (gaya lorentz) pada konduktor-konduktor rotor. Hal ini sesuai dengan hukum gaya lorentz yaitu bila suatu konduktor yang dialiri arus berada dalam suatu kawasan medan magnet, maka konduktor tersebut akan mendapat gaya elektromagnetik. Prinsip kerja motor induksi tiga fasa dapat diurutkan sebagai beikut: 1. Apabila sumber tegangan 3 fase dipasang pada kumparan stator, akan timbul medan putar dengan kecepatan ns = 120 f/P 2. Medan stator tersebut akan mmemotong batang konduktor pada motor 3. Akibatnya pada batang konduktor dari rotor akan timbul GGL induksi 4. Karena batang konduktor merupakan rangkaian yang tertutup maka GGL akan menghasilkan arus (I) 14 5. Adanya arus (I) didalam medan magnet akan menimbulkan gaya (F) pada rotor 6. Bila kopel mula yang dihasilkan oleh gaya (F) pada rotor cukup besar untuk memikul kopel pada beban, rotor akan berputar searah dengan medan putar stator 7. GGL induksi timbul karena terpotongnya batang konduktor (rotor) oleh medan stator. GGL induksi timbul, karena adanya perbedaan relatif antara kecepatan medan putar stator (ns) dengan kecepatan medan putar rotor (nr). 3.2.3 Karakteristik Motor Induksi tiga phasa Karakteristik motor induksi yang penting diketahui adalah : 1. Arus Start ( Is ) Yang dimaksud arus start adalah arus mula yang diperlukan motor induksi untuk memulai putaran rotornya. Motor saat Start akan mengambil arus yang cukup besar dari jala-jala yang jika tidak dibatasi maka akan berbahaya bagi motor itu sendiri. Besarnya arus start ini sekitar 4 sampai dengan 8 kali arus nominal. 2. Arus Nominal ( In ) Yang dimaksud Arus Nominal adalah arus motor induksi yang diperlukan untuk memutar beban penuhnya. 3. Torsi Start ( Ts ) Torsi Start adalah torsi yang dibutuhkan motor untuk mulai memutar poros. Besarnya Torsi start sekitar 0,5 sampai dengan 1,5 Torsi Nominal. 4. Torsi Beban penuh ( Tf ) Torsi Nominal adalah torsi pada poros motor saat dibebani penuh 5. Kecepatan rotor ( nr ) Kecepatan Rotor (nr) pada Motor Induksi dapat berubah ubah dari 0 sampai dengan kecepatan penuh yaitu, sama dengan Kecepatan Medan Putar (ns). Namun karena sifat Motor induksi dimana pada saat kecepatan rotor sama dengan kecepatan medan putar maka rotor akan otomatis diperlambat, sehingga akan selalu timbul slip, 15 sehingga selalu terjadi beda kecepatan rotor dengan kecepatan medan putar. nilai Slip yang penting dan ditulis pada nameplate motor adalah slip pada saat motor diberi beban penuh. 3.2.4 Rangkaian Ekivalen Motor Induksi Sebuah motor induksi identik dengan sebuah transformator. Oleh sebab itu, rangkaian ekivalen motor induksi mirip dengan rangkaian ekivalen transformator. Perbedaannya hanyalah bahwa kumparan rotor dari motor induksi berputar, yang berfungsi untuk menghasilkan daya mekanik. a. Rangkaian Ekivalen Stator Putaran gelombang fluks pada celah udara membangkitkan ggl lawan tiga fasa yang seimbang pada belitan stator. Rangkaian ekivalen stator, seperti gambar berikut ini. Gambar 3. Rangkaian ekivalen stator per-fasa motor induksi. Besarnya tegangan terminal stator manjadi penjumlahan ggl lawan . ) dan jatuh tegangan pada impedansi bocor stator , dapat dinyatakan sebagai berikut : Dimana: V1 = tegangan terminal stator (Volt) E1 = ggl lawamn yang dihasilkan oleh fluks celah udara resultan (Volt) I1 = arus stator (Ampere) 16 R1 = tahanan efektif stator (Ohm) X1 = reaktansi bocor stator (Ohm) Sebagaimana halnya pada transformator, arus stator dua komponen. Komponen pertama terdiri dari adalah komponen beban yang akan menghasilkan fluks yang akan melawan fluks yang dihasilkan oleh arus rotor. Komponen lainnya yaitu , arus yaitu komponen rugi-rugi inti inti ini terbagi lagi menjadi dua komponen yang sefasa dengan komponen rugi-rugi dan komponen magnetisasi pada inti dan celah udara yang tertinggal yang menghasilkan fluks magnetik dari . b. Rangkaian Ekivalen Rotor Pada saat rotor dalam kondisi diam yaitu kondisi sesaat rotor sebelum bergerak, kecepatan relative diantara putaran medan magnet dengan konductor rotor adalah kecepatan sinkron Ns. Pada kondisi ini tegangan induksi yang dibangkitkan pada rangkaian rotor adalah . karena seluruh belitan rotor dihubung-singkat maka akan mengalir arus induksi akibat ggl pada rotor. Sehingga dapat dituliskan persamaannya sebagai berikut : Dari bentuk persamaan di atas, rangkaian ekivalen rotor perfasa dalam keadaan diam digambarkan seperti gambar berikut. Gambar 3... Rangkaian ekivalen per-fasa rotor motor induksi keadaan diam Dimana: I2 = arus rotor dalam keadaan diam (Ampere) E2 = ggl induksi rotor dalam keadaan diam (Volt) R2 = resistansi rotor (Ohm) 17 jX2 = reaktansi rotor dalam keadaan diam (Ohm) c. Rangkaian Ekivalen Lengkap Dari penjelasan rangkaian ekivalen pada stator dan rotor di atas, maka dapat dibuat rangkaian ekivalen perfasa motor induksi tiga fasa pada masing - masing fasa, seperti halnya seperti rangkaian ekivalen sebuah transformator. Gambar 3.. Rangkaian Ekivalen Motor Induksi Tiga Fasa 3.3 Pengasutan Metode Direct On Line (DOL) 3.3.1 Pengertian Pengasutan Motor Induksi 3 Fasa Direct On Line (DOL) Pengasutan secara langsung (DOL) adalah metode pemberian tegangan langsung dari sumber tegangan ke motor listrik melalui perangkat sakelar listrik (magnetic contactor). Pengasutan ini biasanya hanya digunakan untuk motor – motor yang berdaya (P) rendah yaitu di bawah 22 kW, bila ingin diterapkan pada motor di atas 22 kW maka harus memastikan arus awalnya tidak mengganggu kestabilan jaringan penyuplai daya karena saat sakelar listrik diaktifkan maka motor induksi akan menyerap arus awal (inrush current) antara 5 sampai 6 kali arus nominal motor. 3.3.2 Rangkaian Daya dan Kendali Pengasutan Motor Induksi 3 Fasa Direct on Line (DOL) Rangkaian Daya Motor Induksi System DOL Rangkaian daya ialah suatu rangkaian yang merupakan jalur tegangan utama motor, biasanya 220 V, 380 V, 660 V bahkan 6,6 kV. Dalam hal ini komponen utama akan mengalirkan daya dari sumber ke 18 beban (motor). Untuk lebih jelasnya dapat dilihat pada gambar dibawah ini. Keterangan gambar: L1 = Fasa U L2 = Fasa V L3 = Fasa W N = Netral Pe = Pentanahan F9 = MCB K1 = Kontaktor A1 = Koil input kontaktor A2 = Koil output kontaktor M1 = Motor 3 phase Gambar 4.1 Rangkaian Daya Motor Induksi System DOL Dari gambar diatas dapat dijelaskan bahwa fasa R-S-T masuk dalam rangkaian dengan beberapa komponen, diantaranya thermal overload relay (TOR) dan 1 buah kontaktor. Tahapan pemasangan instalasi rangkain daya ialah sebagi berikut : a. Penghantar fasa R-S-T dari sumber masing-masing dihubungkan dengan Mini Circuit Breaker(CB) b. Keluaran fasa dari Mini Circuit Breaker (CB) memasuki kontaktor. c. Keluaran fasa dari kontaktor terhubung dengan Thermal Overload Relay (TOR) d. Keluaran fasa dari Thermal Overload Relay (TOR) dihubungkan dengan terminal yang akan dihubungkan dengan motor. Rangkaian Kontrol Motor Induksi System DOL 19 Mengalirnya atau tidaknya daya untuk motor ini diatur oleh rangkaian kontrolnya yang melalui kontaktor dengan prinsip memutuskan atau mengalirkan daya dari sumber ke motor melalui anak kontaknya.Untuk lebih jelasnya dapat dilihat pada gambar dibawah ini. Keterangan gambar : L = fasa R OL = Emergency stop S0 = Push button off S1 = Push button on K1 = Kontaktor 1 L1 = Lampu indikator Gambar 4.2 Rangkaian Kontrol Motor Induksi System DOL Tahapan pemasangan instalasi rangkain daya ialah sebagi berikut : a. Penghantar fasa dari sumber dihubungkan melalui Mini Circuit Breaker (CB). b. Keluaran fasa dari Mini Circuit Breaker (CB) masuk ke inputan tombol Emergency Stop c. Keluaran fasa dari Emergency Stop masuk ke inputan Thermal Overload Relay (TOR) pada posisi Normally Close (NC) d. Keluaran fasa dari Thermal Overload Relay (TOR) masuk ke inputan Push Button Stop atau tombol warna merah (di tengah) pada posisi Normally Close (NC) e. Keluaran fasa dari Push Button Stop masuk ke inputan dari beberapa komponen diantaranya : 1) Push Button On atau tombol warna hijau 1 pada posisi Normally Open (NO) 2) Anak kontaktor 1 dengan posisi Normally Open (NO) f. Keluaran fasa dari Push Button On masuk ke koil A1 kontaktor , kemudian keluaran koil A2 terhubung ke netral sumber 20 3.4 Pengasutan Metode Star – Delta 3.4.1 Pengertian Pengasutan Motor Induksi 3 Fasa Metode Star-Delta Star awal dilakukan dalam hubungan bintang dan kemudian motor beroperasi normal dalam hubungan delta. Pengendalian bintang ke delta dapat dilakukan dengan sakelar mekanik Y /Δ atau dengan relay / kontaktor magnit. Metoda starting Y /Δ banyak digunakan untuk menjalankan motor induksi rotor sangkar yang mempunyai daya di atas 5 kW (atau sekitar 7 HP). Untuk menjalankan motor dapat dipilih starter yang umum dipakai antara lain : saklar rotari Y /Δ, saklar khusus Y /Δ atau dapat juga menggunakan beberapa kontaktor magnit beserta kelengkapannya yang dirancang khusus untul rangkaian starter Y /Δ. Perlu diingat jika pada name plat motor tertulis 220/380 V, sedangkan tegangan jala-jala yang tersedia sumber 3 fasa 380 V, maka motor tersebut hanya boleh dihubungkan bintang (Y) artinya motor berjalan normal pada hubungan bintang pada tegangan 380 V. Motor tersebut dapat dilakukan starting Y /Δ. Apabila dihubungkan pada tegangan jala 3 fasa 220 V. 3.4.2 Rangkaian Daya dan Kendali Pengasutan Motor Induksi 3 Fasa Rangkaian Daya Star-Delta Motor Induksi Rangkaian daya ialah suatu rangkaian yang merupakan jalur tegangan utama motor, biasanya 220 V, 380 V, 660 V bahkan 6,6 kV. Dalam hal ini komponen utama akan mengalirkan daya dari sumber ke beban (motor). Untuk lebih jelasnya dapat dilihat pada gambar dibawah ini. 21 Gambar 4.3 Rangkaian Daya Star-Delta Motor Induksi Dari gambar diatas dapat dijelaskan menunjukkan bahwa fasa R-S-T masuk dalam rangkaian dengan beberapa komponen, diantaranya thermal overload relay (TOR) dan buah kontaktor KI, K2 & K3. Tahapan pemasangan instalasi rangkain daya ialah sebagi berikut : a. Penghantar fasa R-S-T dari sumber masing-masing dihubungkan dengan Mini Circuit Breaker (CB) b. Keluaran fasa dari Mini Circuit Breaker (CB) memasuki kontaktor 1, kontaktor 2, kontaktor 3 c. Keluaran fasa dari kontaktor terhubung dengan Thermal Overload Relay (TOR) d. Keluaran fasa dari Thermal Overload Relay (TOR) dihubungkan dengan terminal yang akan dihubungkan dengan motor. 22 Rangkaian Kontrol Star-Delta Motor Induksi Keterangan gambar : L = fasa R OL = Emergency stop S0 = Push button off S1 = Push button on K1 = Kontaktor 1 K2 = Kontaktor 2 K3 = Kontaktor 3 L1 = Lampu indikator T1 = Timer N = Netral Gambar 4.4 Rangkaian Kontrol Motor Induksi System Star-Delta Tahapan pemasangan instalasi rangkain daya ialah sebagi berikut : 23 a. Penghantar fasa dari sumber dihubungkan melalui Mini Circuit Breaker (CB) . b. Keluaran fasa dari Mini Circuit Breaker (CB) masuk ke inputan tombol Emergency Stop c. Keluaran fasa dari Emergency Stop masuk ke inputan Push Button Stop atau tombol warna merah pada posisi Normally Close (NC) d. Keluaran fasa dari Push Button Stop masuk ke inputan dari beberapa komponen diantaranya : - Push Button On atau tombol warna hijau 1 pada posisi Normally Open (NO) - Anak kontaktor 1 dengan posisi Normally Open (NO) e. Keluaran fasa dari Push Button On masuk ke inputan dari beberapa komponen diantarannya: - Anak kontaktor 1 dengan posisi Normally Open (NO) - Anak kontaktor 2 dengan posisi Normally Open (NO) - Koil kimer dengan posisi Normally Close (NC) pada saat hubung Star sedangkan posisi Normally Open (NO) pada saat terhubung Delta f. Keluaran fasa dari anak kontaktor K1 masuk inputan Timer g. Keluaran fasa dari anak kontaktor K2 terhubung dengan inputan koil K1 (A1) h. Keluaran fasa dari koil timer dengan posisi Normally Close (NC) terhubung dengan inputan anak kontaktor K3 dengan posisi Normally Close (NC) i. Keluaran fasa dari anak kontaktor K3 terhubung dengan inputan koil kontaktor K2 (A1) j. Keluaran fasa dari koil timer dengan posisi Normally Open (NO) terhubung dengan inputan anak kontaktor K2 dengan posisi Normally Close (NC) k. Keluaran fasa dari anak kontaktor K2 terhubung dengan inputan koil kontaktor K3 (A1) 24 l. Keluaran fasa dari timer, kontaktor K1 (A2), , kontaktor K2 (A2), , kontaktor K3 (A2) semuanya akan terhubung dengan netral dari sumber 3.5 Kekurangan dan Kelebihan Metode Direct On Line (DOL) dan Metode Star-Delta 3.5.1 Metode Star-Delta Kelebihan Metode Star-Delta 1. Arus starting lebih efisien dibanding system DOL. 2. Biaya pemeliharaan murah dan realiable dibanding softstater & VSD. 3. Dapat memperpanjang usia motor. Kelemahan Metode Star-Delta 1. Menggunakan tiga kontaktor sehingga system agak sedikit rumit. 2. Menggunakan banyak komponen dimana potensi kerusakan lebih besar terutama pada relay timer. 3. Cost lebih tinggi disbanding system DOL. 3.5.2 Metode Direct On Line (DOL) Kelebihan Metode D.O.L 1. Rangkaian lebih praktis & sederhana. 2. Biaya pembuatan murah karena tidak memerlukan banyak komponen tambahan. 3. Mudah untuk perbaikan dan pemeliharaan Kekurangan Metode D.O.L 1. Arus starting bisa 7-8 kali arus nominal pada nameplate motor sehingga menyebabkan motor panas jika terlalu sering start/stop dalam waktu singkat (bisa memperpendek usia motor). 2. Jika settingan proteksi tidak pas, akan menyebabkan breaker sering trip dikarenakan Inrush current yang terlau tinggi. 25 26