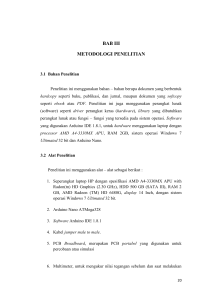
FREE e-book v1.0 Tutorial Pemrograman Mikrokontroler AVR dengan WinAVR GCC (ATMega16/32/8535) http://klikdisini.com/embedded oleh Agfianto Eko Putra ([email protected]) dan Dhani Nugraha ([email protected]) Dapatkan ebook ini gratis di http://klikdisini.com/embedded FREE EBOOK!! Jika Anda merasa ebook ini bermanfaat silahkan mendistribusikan ebook ini dengan GRATIS di website Anda atau dimana saja, selama tidak merubah isi yang ada di e-book ini. Terima kasih… Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 1 Tutorial Pemrograman Mikrokontroler AVR dengan WinAVR GCC (ATMega16/32/8535) Disusun oleh: Agfianto Eko Putra – [email protected] dan Dhani Nugraha - [email protected] Daftar Isi 1. 2. Apakah Mikrokontroler itu? ...................................................................................................... 3 Pengetahuan Dasar Mikrokontroler AVR .................................................................................. 6 2.1. Pendahuluan ....................................................................................................................... 6 2.2. Memilih AVR “yang benar” ............................................................................................... 7 2.3. Ada apa dengan Mikrokontroler AVR ATMega16? ............................................................ 8 2.3.1. Ringkasan Fitur-fitur Mikrokontroler AVR ATMega16 ............................................... 8 2.3.2. Diagram Pin dan Diagram Blok Mikrokontroler AVR ATMega16 ............................... 9 2.3.3. Penjelasan Singkat Pin-pin pada Mikrokontroler AVR ATMega16 ............................ 10 3. Pengenalan Bahasa C untuk Mikrokontroler AVR ................................................................... 13 3.1. Struktur Penulisan Bahasa C ............................................................................................. 13 3.2. Tipe-tipe data dalam Bahasa C .......................................................................................... 14 3.3. Deklarasi Variabel dan Konstanta ..................................................................................... 14 3.4. Pernyataan ........................................................................................................................ 14 3.5. Fungsi ............................................................................................................................... 14 3.6. Pernyataan berkondisi dan Pengulangan............................................................................ 14 3.7. Operasi Logika dan Bilangan Biner .................................................................................. 15 3.8. Operasi Aritmetika............................................................................................................ 16 3.9. Pengulangan Terus-menerus atau Infinite Looping ............................................................ 16 4. Menggunakan AVR Studio dengan WinAVR GCC ................................................................. 17 5. Masukan/Luaran (I/O) pada Mikrokontroler AVR ................................................................... 22 5.1. Register DDRx ................................................................................................................. 23 5.2. Register PORTx................................................................................................................ 23 5.3. Register PINx ................................................................................................................... 24 6. Latihan Tahap-I ....................................................................................................................... 25 6.1. Percobaan-1: LED berkedip-kedip .................................................................................... 25 6.2. Percobaan-2: Membunyikan buzzer! ................................................................................. 26 6.3. Percobaan-3: Aplikasi Pushbutton untuk ON/OFF LED.................................................... 28 7. Timer/Counter pada Mikrokontroler AVR ............................................................................... 29 7.1. Percobaan-4: Menggunakan Timer1 .................................................................................. 33 7.2. Percobaan-5: Menggunakan Timer2 .................................................................................. 35 7.3. Percobaan-6: Menggunakan Timer0 .................................................................................. 37 8. Komunikasi Serial ................................................................................................................... 38 8.1. Penghasil Detak - Clock Generator ................................................................................... 40 8.2. Mengirim Data – USART Transmitter .............................................................................. 44 8.3. Menerima Data – USART Receive ................................................................................... 46 8.4. Percobaan-7: Komunikasi Serial ....................................................................................... 47 9. Setelah Ini kemana? ................................................................................................................ 49 Bonus-1: Hasil kompilasi Flowcode AVR 3.0 yang unik?! .............................................................. 51 Bonus-2: FlowCode AVR 3.0: Aplikasi I/O Sederhana ................................................................... 55 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 2 Bonus-3: FlowCode AVR 3.0: Aplikasi LCD 2x16 karakter ........................................................... 58 Bonus-4: FlowCode AVR 3.0: Menghitung Sapi! ........................................................................... 62 Bonus-5: Animasi LED Mikrokontroler ATMega32 dengan C dan Assembly ................................. 73 Bonus-6: Aplikasi Pushbutton Mikrokontroler ATMega32 dengan Assembly ................................. 78 Belajar Mikrokontroler AT89C51/52/55: Teori dan Aplikasi, Edisi 2 .............................................. 83 PLC: Konsep, Pemrograman dan Aplikasi Omron Sysmac dan ZEN ............................................... 84 Penapis Aktif Eltronika: Teori dan Praktek ..................................................................................... 85 Belajar Bahasa Assembly dengan Emu8086 .................................................................................... 86 Pengendalian Mobile Robot (MOBOT) dengan MOBOTSIM v1.0 ................................................. 87 Pasti Ada Hikmahnya...! ................................................................................................................. 88 1. Apakah Mikrokontroler itu? Jika kita bicara tentang Mikrokontroler, maka tidak terlepas dari pengertian atau definisi tentang Komputer itu sendiri, mengapa? Ada kesamaan-kesamaan antara Mikrokontroler dengan Komputer (atau Mikrokomputer), antara lain: Sama-sama memiliki unit pengolah pusat atau yang lebih dikenal dengan CPU (Central Processing Unit); CPU tersebut sama-sama menjalankan program dari suatu lokasi atau tempat, biasanya dari ROM (Read Only Memory)1 atau RAM (Random Access Memory)2; Sama-sama memiliki RAM yang digunakan untuk menyimpan data-data sementara atau yang lebih dikenal dengan variabel-variabel; Sama-sama memiliki beberapa luaran dan masukan (I/O) yang digunakan untuk melakukan komunikasi timbal-balik dengan dunia luar, melalui sensor (masukan) dan aktuator (luaran), perhatikan bagan yang ditunjukkan pada Gambar 1. Masukanmasukan Pemroses • sensor cahaya • sensor suhu • sensor tekanan, dll • uC AT89 • uC AVR • uC PIC16F, dll Luaran-luaran • aktuator motor • relay • speaker, dll Gambar 1. Bagan masukan, pemrosesan hingga luaran Lantas apa yang membedakan antara Mikrokontroler dengan Komputer atau Mikrokomputer? Begitu mungkin pertanyaan yang ada di benak kita, saat kita membaca beberapa daftar kesamaan yang sudah saya tuliskan tersebut. Sama sekali berbeda, itu jawaban yang saya berikan kepada Anda: Mikrokontroler adalah versi mini dan untuk aplikasi khusus dari Mikrokomputer atau Komputer! 1 2 Memori yang hanya bisa dibaca saja. Memori yang bisa dibaca juga bisa ditulisi. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 3 Berikut saya berikan kembali daftar kesamaan yang pernah kemukakan sebelumnya dengan menekankan pada perbedaan antara Mikrokontroler dan Mikrokomputer: CPU pada sebuah Komputer berada eksternal dalam suatu sistem, sampai saat ini kecepatan operasionalnya sudah mencapai lebih dari 2,5 GHz, sedangkan CPU pada Mikrokontroler berada didalam (internal) sebuah chip, kecepatan kerja atau operasionalnya masih cukup rendah, dalam orde MHz (misalnya, 24 MHz, 40 MHz dan lain sebagainya). Kecepatan yang relatif rendah ini sudah mencukupi untuk aplikasi-aplikasi berbasis mikrokontroler. Jika CPU pada mikrokomputer menjalankan program dalam ROM atau yang lebih dikenal dengan BIOS (Basic I/O System) pada saat awal dihidupkan, kemudian mengambil atau menjalankan program yang tersimpan dalam hard disk. Sedangkan mikrokontroler sejak awal menjalankan program yang tersimpan dalam ROM internal-nya (bisa berupa Mask ROM atau Flash PEROM atau Flash ROM). Sifat memori program dalam mikrokontroler ini nonvolatile, artinya tetap akan tersimpan walaupun tidak diberi catu daya. RAM pada mikrokomputer bisa mencapai ukuran sekian GByte dan bisa di-upgrade ke ukuran yang lebih besar dan berlokasi di luar CPU-nya, sedangkan RAM pada mikrokontroler ada di dalam chip dan kapasitasnya rendah, misalnya 128 byte, 256 byte dan seterusnya dan ukuran yang relatif kecil inipun dirasa cukup untuk aplikasi-aplikasi mikrokontroler. Luaran dan masukan (I/O) pada mikrokomputer jauh lebih kompleks dibandingkan dengan mikrokontroler, yang jauh lebih sederhana, selain itu, pada mikrokontroler akses keluaran dan masukan bisa per bit. Jika diamati lebih lanjut, bisa dikatakan bahwa Mikrokomputer atau Komputer merupakan komputer serbaguna atau general purpose computer, bisa dimanfaatkan untuk berbagai macam aplikasi (atau perangkat lunak). Sedangkan mikrokontroler adalah special purpose computer atau komputer untuk tujuan khusus, hanya satu macam aplikasi saja. Perhatikan Gambar 2, agar Anda mendapatkan gambaran tentang mikrokontroler lebih jelas. Gambar 2. Diagram Blok mikrokontroler (yang) disederhanakan Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 4 ALU, Instruction Decoder, Accumulator dan Control Logic, sebagaimana ditunjukkan pada Gambar 1.2, merupakan Otak-nya mikrokontroler yang bersangkutan. Jantungnya berasal dari detak OSC (lihat pada Gambar 1.2 sebelah kiri atas). Sedangkan di sekeliling ‘Otak’ terdapat berbagai macam periferal seperti SFR (Special Function Register) yang bertugas menyimpan data-data sementara selama proses berlangsung). Instruction Decoder bertugas menerjemahkan setiap instruksi yang ada di dalam Program Memory (hasil dari pemrograman yang kita buat sebelumnya). Hasil penerjemahan tersebut merupakan suatu operasi yang harus dikerjakan oleh ALU (Arithmetic Logic Unit), mungkin dengan bantuan memori sementara Accumulator yang kemudian menghasilkan sinyal-sinyal kontrol ke seluruh periferal yang terkait melalui Control Logic. Memori RAM atau RAM Memory bisa digunakan sebagai tempat penyimpan sementara, sedangkan SFR (Special Function Register) sebagian ada yang langsung berhubungan dengan I/O dari mikrokontroler yang bersangkutan dan sebagian lain berhubungan dengan berbagai macam operasional mikrokontroler. ADC atau Analog to Digital Converter (tidak setiap mikrokontroler memiliki ADC internal), digunakan untuk mengubah data-data analog menjadi digital untuk diolah atau diproses lebih lanjut. Timer atau Counter digunakan sebagai pewaktu atau pencacah, sebagai pewaktu fungsinya seperti sebuah jam digital dan bisa diatur cara kerjanya. Sedangkan pencacah lebih digunakan sebagai penghitung atau pencacah event atau bisa juga digunakan untuk menghitung berapa jumlah pulsa dalam satu detik dan lain sebagainya. Biasanya sebuah mikrokontroler bisa memiliki lebihd dari 1 timer. EEPROM (sama seperti RAM hanya saja tetap akan menyimpan data walaupun tidak mendapatkan sumber listrik/daya) dan port-port I/O untuk masukan/luaran, untuk melakukan komunikasi dengan periferal eksternal mikrokontroler seperti sensor dan aktuator. INFORMASI PELATIHAN PRIVATE AVR DI HTTP://KLIKDISINI.COM/PELATIHANAVR Beberapa catatan mikrokontroler lainnya adalah: ‘Tertanam’ (atau embedded) dalam beberapa piranti (umumnya merupakan produk konsumen) atau yang dikenal dengan istilah embedded system atau embedded controller; Terdedikasi untuk satu macam aplikasi saja (lihat contoh-contoh yang akan saya terangkan pada bagian lain dari buku ini); Hanya membutuhkan daya yang (cukup) rendah (low power) sekitar 50 mWatt (Anda bandingkan dengan komputer yang bisa mencapai 50 Watt lebih); Memiliki beberapa keluaran maupun masukan yang terdedikasi, untuk tujuan atau fungsifungsi khusus; Kecil dan relatif lebih murah (seri AT89 di pasaran serendah-rendahnya bisa mencapai Rp. 15.000,00, mikrokontroler AVR di pasaran saat ini juga relatif murah sedangkan Basic Stamp bisa mencapai Rp. 500.000,00); Seringkali tahan-banting, terutama untuk aplikasi-aplikasi yang berhubungan dengan mesin atau otomotif atau militer. Mikrokontroler yang beredar saat ini dibedakan menjadi dua macam, berdasarkan arsitekturnya: Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 5 o Tipe CISC atau Complex Instruction Set Computing yang lebih kaya instruksi tetapi fasilitas internal secukupnya saja (seri AT89 memiliki 255 instruksi); o Tipe RISC atau Reduced Instruction Set Computing yang justru lebih kaya fasilitas internalnya tetapi jumlah instruksi secukupnya (seri PIC16F hanya ada sekitar 30-an instruksi). 2. Pengetahuan Dasar Mikrokontroler AVR 2.1. Pendahuluan Keluarga Mikrokontroler AVR merupakan mikrokontroler dengan arsitektur modern (emang selama ini ada yang kuno kali??). Perhatikan Gambar 3, Atmel membuat 5 (lima) macam atau jenis mikrokontroler AVR, yaitu: TinyAVR (tidak ada kaitannya ama mbak Tini yang jualan gudeg…) Mikrokontroler (mungil, hanya 8 sampai 32 pin) serbaguna dengan Memori Flash untuk menyimpan program hingga 16K Bytes, dilengkapi SRAM dan EEPROM 512 Bytes. MegaAVR (nah yang ini sudah mulai banyak yang nulis bukunya…) Mikrokontroler dengan unjuk-kerja tinggi, dilengkapi Pengali Perangkat keras (Hardware Multiplier), mampu menyimpan program hingga 256 KBytes, dilengkapi EEPROM 4K Bytes dan SRAM 8K Bytes. AVR XMEGA Mikrokontroler AVR 8/16-bit XMEGA memiliki periferal baru dan canggih dengan unjukkerja, sistem Event dan DMA yang ditingkatkan, serta merupakan pengembangan keluarga AVR untuk pasar low power dan high performance (daya rendah dan unjuk-kerja tinggi). AVR32 UC3 Unjuk-kerja tinggi, mikrokontroler flash AVR32 32-bit daya rendah. Memiliki flash hingga 512 KByte dan SRAM 128 KByte. AVR32 AP7 Unjuk-kerja tinggi, prosesor aplikasi AVR32 32-bit daya rendah, memiliki SRAM hingga 32 KByte. Gambar 3. Mikrokontroler Atmel: Sukses melalui inovasi Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 6 Cuman yang populer di Indonesia adalah tinyAVR dan megaAVR, itupun masih kalah populer dengan keluarga AT89 yang belakangan juga sudah mulai banyak yang beralih ke AVR. Perbedaan jenis-jenis tersebut terletak dari fasilitas, atau lebih dikenal dengan fitur-fiturnya. Jenis TinyAVR merupakan mikrokontroler dengan jumlah pin yang terbatas (sedikit maksudnya) dan sekaligus fitur-fiturnya juga terbatas dibandingkan yang megaAVR. Semua mikrokontroler AVR memiliki set instruksi (assembly) dan organisasi memori yang sama, dengan demikian berpindahpindah (walaupun tidak disarankan) antar mikrokontroler AVR gak masalah dan mudah! Beberapa mikrokontroler AVR memiliki SRAM, EEPROM, antarmuka SRAM eksternal, ADC, pengali perangkat keras, UART, USART dan lain sebagainya. Bayangkan saja Anda punya TinyAVR dan MegaAVR, kemudian telanjangi (maksudnya copotin) semua periferal-nya, nah Anda akan memiliki AVR Core yang sama! Kayak membuang semua isi hamburger, maka Anda akan mendapatkan rotinya doang yang sama… 2.2. Memilih AVR “yang benar” Moralnya… tidak peduli tinyAVR, megaAVR, XMEGA AVR (AVR32 pengecualian karena masuk ke mikrokontroler 32-bit) semuanya memiliki unjuk-kerja yang sama saja, tetapi dengan “kompleksitas” atau fasilitas yang berbeda-beda, ibaratnya begini: banyak fasilitas dan fitur = megaAVR, fitur atau fasilitas terbatas = TinyAVR. Gitu aja kok repot… Untuk lebih jelasnya perhatikan keterangan singkat yang saya berikan berikut ini, berdasar informasi resmi dari Atmel (http://www.atmel.com) dan maaf masih dalam bahasa Inggris (supaya kelihatannya aura kecanggihannya, he he he...). tinyAVR o Optimized for simple applications requiring a small microcontroller. o Great performance for cost effective devices. o Fully featured with 10-bit ADCs and high speed PWMs onboard. o Self-Programming Flash memory for maximum flexibility. o debugWIRE On-Chip Debug and In-System Programming. megaAVR o Self-Programming Flash memory with boot block. o High accuracy 10-bit A/D converters with up to x200 analog gain stage. o USART, SPI and TWI(1) compliant serial interfaces. o IEEE 1149.1 compliant JTAG interface on megaAVRs with 44 pins or more. o On-Chip Debug through JTAG or debugWIRE interface. AVR XMEGA o picoPower technology for ultra low power consumption o True 1.6 volt operation and CPU speed up to 32 MHz. o Event System and DMA Controller. o High speed, high resolution 12-bit ADC and DAC. o Crypto engine, Timers/Counters and fast communication interfaces. o Accurate and flexible Clock System with dynamic clock switching. AVR32 UC3 o High CPU performance. o Low power consumption. o High data throughput. o Low system cost. o High reliability. o Easy to use. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 7 AVR32 AP7 o High CPU perfromance. o Low power consumption. o SIMD / DSP instructions. o Instruction & data caches. o Memory management unit. o Built for embedded Linux 2.3. Ada apa dengan Mikrokontroler AVR ATMega16? O tidak apa-apa! Dalam buku saya ini memang sengaja menggunakan mikrokontroler AVR ATMega16 karena fitur-fitur yang dibutuhkan. Tentu saja Anda bisa menggunakan tipe AVR lainnya, apakah yang 40 pin atau yang kurang dari itu, bisa ATMega88, ATMega16, ATMega128, ATMega8535, ATMega168 dan lain sebagainya. 2.3.1. Ringkasan Fitur-fitur Mikrokontroler AVR ATMega16 Berikut ini saya ringkaskan berbagai macam fitur-fitur untuk Mikrokontroler AVR ATMega16 atau Atmega16L (Mikrokontroler AVR 8-bit dengan Flash ISP 16kByte) langsung dari datasheet-nya, maaf juga masih sebagian besar dalam Bahasa Inggris3... • • Mikrokontroler AVR 8-bit daya-rendah dengan unjuk-kerja tinggi. Arsitektur RISC tingkat lanjut – 131 Instruksi yang ampuh – Hampir semuanya dieksekusi dalam satu detak (clock) saja – 32 x 8 General Purpose Working Registers – Operasi statis penuh – Throughput hingga 16 MIPS pada 16 MHz – Pengali On-chip 2-cycle • High Endurance Non-volatile Memory segments – 16K Bytes of In-System Self-programmable Flash program memory – 512 Bytes EEPROM – 1K Byte Internal SRAM – Write/Erase Cycles: 10,000 Flash/100,000 EEPROM – Data retention: 20 years at 85°C/100 years at 25°C – Optional Boot Code Section with Independent Lock Bits In-System Programming by On-chip Boot Program True Read-While-Write Operation – Programming Lock for Software Security Antarmuka JTAG (IEEE std. 1149.1 Compliant) – Boundary-scan Capabilities According to the JTAG Standard – Extensive On-chip Debug Support – Programming of Flash, EEPROM, Fuses, and Lock Bits through the JTAG Interface Fitur-fitur periferal – Dua Pewaktu/Pencacah 8-bit dengan Praskalar dan Mode Pembanding terpisah. – Sebuah Pewaktu/Pencacah 16-bit Timer/Counter Dengan Praskalar, Mode Pembanding dan Capture yang terpisah. – Pencacah Real Time dengan Osilator terpisah – Empat kanal PWM – 8-kanal, 10-bit ADC 8 Single-ended Channels • • 3 Jika Anda bingung dengan istilah-istilah pada fitur-fitur ini silahkan merujuk ke datasheet aslinya, sehingga fokus pada buku ini tidak melulu pada datasheet... Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 8 • • • • • 7 Differential Channels in TQFP Package Only 2 Differential Channels with Programmable Gain at 1x, 10x, or 200x – Byte-oriented Two-wire Serial Interface – Programmable Serial USART – Master/Slave SPI Serial Interface – Pewaktu Watchdog yang bisa diprogram dengan Osilator On-chip yang terpisah – Komparator Analog On-chip Fitur-fitur Mikrokontroler khusus – Reset saat Power-on dan Deteksi Brown-out yang bisa diprogram – Internal Calibrated RC Oscillator – Sumber interupsi Eksternal dan INternal – Enam Mode Sleep: Idle, ADC Noise Reduction, Power-save, Power-down, Standby and Extended Standby I/O and Packages – 32 Programmable I/O Lines – 40-pin PDIP, 44-lead TQFP, and 44-pad QFN/MLF Tegangan kerja – 2.7 - 5.5V untuk Atmega16L – 4.5 - 5.5V untuk Atmega16 Kecepatan (frekuensi clock) – 0 - 8 MHz untuk Atmega16L – 0 - 16 MHz untuk Atmega16 Konsumsi daya pada 1 MHz, 3V, 25°C for Atmega16L – Aktif: 1.1 mA – Idle Mode: 0.35 mA – Mode Power-down: < 1 A INFORMASI PELATIHAN PRIVATE AVR DI HTTP://KLIKDISINI.COM/PELATIHANAVR 2.3.2. Diagram Pin dan Diagram Blok Mikrokontroler AVR ATMega16 Pada Gambar 4 dan 5 ditunjukkan diagram pin, masing-masing, untuk Mikrokontroler AVR ATMega16 tipe PDIP dan TQFP/MLF atau dikenal sebagai SMD. Gambar 4. Diagram Pin Mikrokontroler AVR ATMega16 tipe PDIP Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 9 Pada Gambar 6 dan 7 ditunjukkan diagram blok untuk Mikrokontroler AVR ATMega16, perhatikan begitu banyaknya fitur-fitur dalam diagram blok tersebut, sebagaimana juga sudah saya kutipkan pada bagian sebelumnya. Gambar 5. Diagram Pin Mikrokontroler AVR ATMega16 tipe SMD 2.3.3. Penjelasan Singkat Pin-pin pada Mikrokontroler AVR ATMega16 Berikut kita jelaskan secara singkat fungsi dari masing-masing PIN pada Mikrokontroler AVR ATMega16. Vcc GND Port A (PA7..PA0) Port B (PB7..PB0) Port C (PC7..PC0) 4 Masukan tegangan catu daya Ground, emang apalagi kalau bukan ground... Port A berfungsi sebagai masukan analog ke ADC internal pada mikrokontroler ATMega16, selain itu juga berfungsi sebagai port I/O dwi-arah 8-bit, jika ADC-nya tidak digunakan. Masing-masing pin menyediakan resistor pull-up internal4 yang bisa diaktifkan untuk masing-masing bit. Port B berfungsi sebagai sebagai port I/O dwi-arah 8-bit.Masingmasing pin menyediakan resistor pull-up internal yang bisa diaktifkan untuk masing-masing bit. Port B juga memiliki berbagai macam fungsi alternatif, sebagaimana ditunjukkan pada Tabel 1.1 Port C berfungsi sebagai sebagai port I/O dwi-arah 8-bit.Masingmasing pin menyediakan resistor pull-up internal yang bisa diaktifkan untuk masing-masing bit. Port C juga digunakan sebagai antarmuka JTAG, sebagaimana ditunjukkan pada Tabel 1.2 Resistor pull up internal berkaitan dengan rangkaian internal pada mikrokontroler AVR yang bersangkutan. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 10 Port D (PD7..PD0) /RESET XTAL1 XTAL2 AVCC AREF Port D berfungsi sebagai sebagai port I/O dwi-arah 8-bit.Masingmasing pin menyediakan resistor pull-up internal yang bisa diaktifkan untuk masing-masing bit. Port D juga memiliki berbagai macam fungsi alternatif, sebagaimana ditunjukkan pada Tabel 1.3 Masukan Reset. Level rendah pada pin ini selama lebih dari lama waktu minimum yang ditentukan akan menyebabkan reset, walaupun clock tidak dijalankan. Masukan ke penguat osilator terbalik (inverting) dan masukan ke rangkaian clock internal. Luaran dari penguat osilator terbalik Merupakan masukan tegangan catu daya untuk Port A sebagai ADC, biasanya dihubungkan ke Vcc, walaupun ADC-nya tidak digunakan. Jika ADC digunakan sebaiknya dihubungkan ke Vcc melalui tapis lolos-bawah (low-pass filter). Merupakan tegangan referensi untuk ADC Gambar 6. Diagram blok Mikrokontroler AVR ATMega16 – Bagian I Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 11 Gambar 7. Diagram blok Mikrokontroler AVR ATMega16 – Bagian II Pada Tabel 1, 2 dan 3 ditunjukkan masing-masing alternatif fungsi dari Port B, Port C dan Port D. Dalam buku saya ini sengaja penjelasan dari masing-masing fungsi tersebut (kecuali antarmuka JTAG) akan dibahas pada saat digunakan, sehingga Anda bisa memahami langsung dengan mencoba, istilah kerennya “Learning by Doing”... Tabel 1. Alternatif fungsi PORTB Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 12 Tabel 2. Alternatif fungsi PORTC Tabel 3. Alternatif fungsi PORTD 3. Pengenalan Bahasa C untuk Mikrokontroler AVR Bahasa C luas digunakan untuk pemrograman berbagai jenis perangkat, termasuk mikrokontroler, khususnya seri AVR dari Atmel. Ada yang menyebutkan bahwa bahasa ini merupakan High Level Language sisanya menyebut sebagai Midle Level Language. Dengan demikian seorang programmer dapat menuangkan (menuliskan) algoritmanya dengan mudah. 3.1. Struktur Penulisan Bahasa C Perhatikan struktur penulisan dalam Bahasa C sebagai berikut... #include < [library1.h] > // Opsional #define [nama1] [nilai]; // Opsional [global variables] [functions] // Opsional // Opsional int main(void) // Program Utama { [Deklarasi local variable/constant] [Isi Program Utama] } Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 13 Keterangan: Opsional artinya boleh ditulis boleh tidak, menyesuaikan kebutuhan – tuliskan pustaka apa saja yang digunakan dan lain sebagainya Penulisan variabel dilakukan di awal agar aman bisa digunakan sepanjang program, demikian juga dengan deklarasi fungsi-fungsi yang terlibat Silahkan ikuti (baca) terus tutorial ini untuk melihat contoh-contoh program di bagian lain tutorial ini. 3.2. Tipe-tipe data dalam Bahasa C char : 1 byte ( -128 s/d 127 ) unsigned char : 1 byte ( 0 s/d 255 ) int: 2 byte ( -32768 s/d 32767 ) unsigned int: 2 byte ( 0 s/d 65535 ) long: 4 byte ( -2147483648 s/d 2147483647 ) unsigned long: 4 byte ( 0 s/d 4294967295 ) float: bilangan desimal array: kumpulan data-data yang sama tipenya. 3.3. Deklarasi Variabel dan Konstanta Variabel adalah memori penyimpanan data yang nilainya dapat diubah-ubah. Penulisan : [tipe data] [nama] = [nilai]; Konstanta adalah memori penyimpanan data yang nilainya tidak dapat diubah. Penulisan : const [nama] = [nilai]; Global variable atau constant dapat diakses di seluruh bagian program. Local variable atau constant hanya dapat diakses oleh fungsi tempat dideklarasikannya. 3.4. Pernyataan Statement atau pernyataan adalah setiap operasi dalam pemrograman, harus diakhiri dengan [;] atau [}]. Pernyataan tidak akan dieksekusi bila diawali dengan tanda [//] untuk satu baris. Lebih dari 1 baris gunakan pasangan [/*] dan [*/]. Pernyataan yang tidak dieksekusi disebut juga komentar. Contoh: suhu=adc/255*100; //contoh rumus perhitungan suhu 3.5. Fungsi Function atau fungsi adalah bagian program yang dapat dipanggil oleh program utama. Penulisan : [tipe data hasil] [nama function]([tipe data input 1],[tipe data input 2]) { [pernyataan_1]; [pernyataan_2]; ... } 3.6. Pernyataan berkondisi dan Pengulangan if else: digunakan untuk menyeleksi satu atau beberapa kondisi if ( [persyaratan] ) { Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 14 [statement1]; [statement2]; ... } else { [statement3]; [statement4]; ... } for : digunakan untuk pengulangan dengan jumlah yang sudah diketahui – berapa kali diulang. for ( [nilai awal] ; [syarat] ; [operasi nilai] ) { [statement1]; [statement2]; ... } while: digunakan untuk pengulangan (looping) jika dan sealama memenuhi suatu kondisi masih dipenuhi (pengulangan selama benar while ( [persyaratan] ) { [statement1]; [statement2]; ... } do while: digunakan untuk pengulangan jika dan selama memenuhi syarat tertentu, namun min 1 kali do { [statement1]; [statement2]; ... } while ([persyaratan]) switch case: digunakan untuk seleksi dengan banyak kondisi switch ( [nama variabel] ) { case [nilai1]: [statement1]; break; case [nilai2]: [statement2]; break; ... } 3.7. Operasi Logika dan Bilangan Biner Operator Logika Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 15 AND: NOT: OR : && ! || AND: OR : XOR : Shift right: Shift left : & | ^ >> << Biner Lebih besar sama dengan: >= Lebih kecil/besar: < , > Lebih kecil sama dengan : <= 3.8. Operasi Aritmetika Operator +, -, *, / +=, -=, *=, /= % ++, -- Keterangan Tambah, kurang, kali dan bagi Nilai di sebelah kiri operator ditambah, dikurangi, dikali atau dibagi dengan nilai di sebelah kanan operator. Sisa pembagian Ditambah 1 (increment) atau dikurangi satu (decrement) Contoh: a = 5 * 6 + 2 / 2 – 1 hasilnya 30 a *= 5 jika nilai awal a=30, maka hasilnya 150 a += 3 jika nilai awal a=30, maka hasilnya 33 a++ jika nilai awal a=5, maka hasilnya 6 a-jika nilai awal a=5, maka hasilnya 4, dst 3.9. Pengulangan Terus-menerus atau Infinite Looping Apa itu Pengulangan terus-menerus atau infinite looping? Yaitu suatu pengulangan atau kalang (loop) yang dilakuka terus-menerus tanpa batas, hingga rangkaian tidak lagi mendapatkan sumber catu daya. Yang perlu Anda ingat, bahwa kode-kode program yang dijalankan, dalam kaidah Bahasa C, adalah yang ada di fungsi utama atau main, seperti contoh berikut... void main() { // pernyataan-pernyataan program } Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 16 Program akan dijalankan berurutan dari atas ke bawah dan program tersebut hanya akan dijalankan sekali saja. Jika menggunakan infinite loop (ada yang mengatakan sebagai pengulangan tak-hingga atau kalang tak-hingga, gak masalah, artinya sama saja kok), maka program yang ada di dalam pengulangan tersebut akan dijalankan berulang-ulang terus-menerus, contoh... void main() { // pernyataan-pernyataan program while (1); // infinite loop { // pernyataan2 } } Untuk keluar dari infinite looping gunakan perintah break; Mengapa terjadi Infinite Looping ?? Perhatikan pada contoh tersebut, pernyataan atau instruksi while (1) menyatakan bahwa kondisi SELALU BENAR, sehingga selalu dilakukan pengulangan terus-menerus! Coba bedakan dengan contoh berikut... void main() { // pernyataan-pernyataan program while (index<5); // infinite loop { // pernyataan2 Index += 1; } } Program di dalam kurung kurawa setelah instruksi while (index<5) akan dijalankan selama nilai dari index kurang dari 5, index merupakan variabel sehingga nilainya bisa berubah. Nah, jika index lebih dari atau sama dengan 5, maka pengulangan dihentikan. 4. Menggunakan AVR Studio dengan WinAVR GCC AVR Studio 4 merupakan perangkat lunak gratis (free software) yang bisa anda unduh di internet melalui websitenya Atmel5. Perangkat lunak ini bisa Anda gunakan untuk menulis program bahasa mesin (assembly) dan, jika diintegrasikan dengan winAVR GCC6, bahasa C, mensimulasi program yang Anda buat7 dan kemudian mendebug program sehingga menghasilkan berkas dengan ekstensi .hex yang bisa anda unduh kedalam IC mikrokontroller anda. Untuk pertama kali, Anda harus melakukan instalasi AVR Studio 4 ini ke komputer anda, jika ingin diintegrasikan dengan WinAVR GCC, lakukan instalasi WinAVR GCC terlebih dahulu sebelum AVR Stdui 4.0. Cara menginstalnya pun mudah layaknya anda menginstal perangkat lunak komputer 5 http://www.atmel.com Unduh WinAVR GCC di 7 Pengertian simulasi disini adalah simulasi dalam tingkat register bukan simulasi dengan piranti (device). Jika Anda menginginkan simulasi dengan rangkain dan piranti, gunakan free software lainnya yaitu VMLAB yang bisa diunduh di http://amctools.com/download.htm (versi terbaru saat ebook ini ditulis adalah v3.15) 6 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 17 yang lain. Gambar 8 adalah contoh tampilan utama dari AVR Studio 4.0 saat pertama kali Anda jalankan. Gambar 8. Tampilan awal AVR Studio 4.0 – Wizard Dialog Tampilan yang ditunjukkan pada Gambar 8 bukan merupakan tampilan utama dari AVR Studio 4, melainkan kotak dialog wizard yang akan menuntun kita, khususnya, membuat program baru (lihat pada tanda panah, bahwa dialog ini diaktifkan setiap kali AVR Studio 4 dijalankan, hilangkan tanda centang jika Anda tidak ingin mengaktifkan kotak dialog ini di awal program). Okey, sekarang kita klik New Project, sehingga akan ditampilkan pilihan dan isian-isian yang ditunjukkan pada Gambar 9. Perhatikan tanda panah di Gambar 9, lakukan pilihan bahasa apa yang akan Anda gunakan, apakah Atmel AVR Assembler atau AVR GCC? Karena kita akan belajar pemrograman mikrokontroler AVR menggunakan Bahasa C, maka dipilih AVR GCC. Langkah berikutnya adalah, perhatikan tanda panah di Gambar 10, mengisi Project name (atau nama proyek), Initial file (nama file utama proyek yang bersangkutan) dan Location (tempat menyimpan proyek Anda, klik pada tanda panah jika Anda menginginkan lokasi lainnya). Kemudian klik Next jika sudah selesai. Kemudian ditampilkan Gambar 11. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 18 Gambar 9. Halaman 2 kotak dialog wizard Gambar 10. Halaman 2 kotak dialog wizard saat dipilih AVR GCC Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 19 Gambar 11. Halaman 3 kotak dialog wizard – memilih mikrokontroler AVR Langkah selanjutnya adalah memilih mikrokontroler AVR yang digunakan, perhatikan tanda panah pada Gambar 11, dan akhiri dengan klik Finish. Sehingga ditampilkan jendela utama dari AVR Studio 4, sebagaimana ditunjukkan pada Gambar 12, dengan editor (perhatikan tanda panah pada Gambar 12) siap digunakan untuk mengetikkan program Anda. Gambar 12. Jendela utama AVR Studio 4 Okey, misalnya sekarang kita ketikkan program berikut, ketik saja dulu, ntar kita terangkan atau berikan penjelasan tentang program ini di halaman-halaman berikutnya... Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 20 Simpan berkas (program) Anda dengan Ctrl+S atau pilih menu File Save. Kemudian lakukan kompilasi (tekan F7), jika tidak ada kesalahan akan ditampilkan laporan seperti contoh berikut... Wow! Anda sudah berhasil membuat program mikrokontroler AVR Anda yang pertama, selamat ya! Luar biasa! Lha terus habis gini ngapain? Oya, Anda langsung bisa mensimulasikan-nya (Ctrl+Shift+Alt+F5) dengan AVR Studio 4 (perhatikan Gambar 13) atau men-download-kan hex-nya ke board mikrokontroler AVR Anda8. 8 Untuk urusan mendownload program (HEX) ke mikrokontroler silahkan merujuk ke artikel saya yang terkait di ??, dan ikuti diskusi-nya. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 21 Gambar 13. Jendela Debugger AVR Studio 4 Okey, sampai disini pendahuluan AVR Studio 4-nya, sekarang kita mulai bahas konsep pemrogramannya, antara lain: Konsep Masukan/Luaran atau I/O, dan Timer/Counter pada Mikrokontroler AVR 5. Masukan/Luaran (I/O) pada Mikrokontroler AVR Mohon silahkan melihat kembali berbagai macam fitur ATMega16 (sebagai contoh mikrokontroler AVR) pada halaman-halaman sebelum ini. Salah satunya adalah memiliki 4 x 8 saluran masukan dan luaran digital (berlogika 0 atau 1), totalnya 32 bit atau 32 pin! Masing-masing diberi nama A, B, C dan D (masing-masing 8 pin atau 8 bit). Kali ini kita akan membahas tentang hal dasar berkaitan dengan konsep I/O atau masukan/luaran pada mikrokontroler AVR: Membaca tingkat tegangan masukan, apakah berlogika 0 (tegangan disekitar 0 volt) atau 1 (tegangan sekitar 5 volt maksimal); Mengeluarkan tingkat tegangan 0 (sekitar 0 volt) atau 1 (sekitar 5 volt); Untuk keperlua tersebut, AVR memiliki beberapa register yang terkait, yaitu DDRx, PORTx dan PINx9, berikut penjelasan masing-masing... 9 Tanda ‘x’ diganti dengan A, B, C atau D menyesuaikan dengan pin masukan/luaran yang digunakan. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 22 5.1. Register DDRx Digunakan untuk menentukan apakah sebuah pin pada sebuat PORT (A, B, C atau D) sebagai masukan atau luaran atau disebut sebagai arah (direction) dari pin yang bersangkutan: Berikan logika 1 (satu) pada bit yang terkait agar dijadikan sebagai luaran atau output. Berikan logika 0 (nol) pada bit yang terkait agar dijadikan sebagai masukan atau input. Misal PORTA semua bit akan digunakan sebagai masukan, maka untuk mengaturnya kita gunakan perintah... DDRA= 0x00; //seluruh pin-pin pada Port A digunakan sebagai input Misalnya lagi, PORTA.0 akan dijadikan masukan sedangkan PORTA.2 sampai PORTA.7 akan digunakan sebagai luaran, maka perintahnya... DDRA= 0xFE; Perhatikan 0xFE (heksa) = 0b11111110 (biner), perhatikan baik-baik konversi biner ini, setiap bit nilai biner mewakili Pin-Pin pada PortA. 5.2. Register PORTx Sebagaimana dijelaskan sebelumnya, jika sebuah PORT, semua atau sebagian, dikonfigurasi sebagai masukan, maka register ini berfungsi sebagai penentu apakah kondisi pin yang terkait di-pullup atau Floating. Begitu juga jika dikonfigurasi sebagai luaran, maka register ini menentukan kondisi pin yang terkait terbaca HIGH atau LOW. Untuk memahami hal ini, perhatikan Gambar 14. Gambar 14. Kondisi pullup pada suatu PORT Penjelasan: Jika PIN.1 dihubungkan ke VCC (tegangan 5 Volt) melalui resistor (R), maka inilah yang di maksud dengan pullup. Saat tidak ada tegangan dari luar, PIN.1 akan cenderung berkondisi HIGH (logika 1). Sedangkan PIN.2 dibiarkan begitu saja sehingga kondisi logik dari PIN.2 begitu rentan terhadap pengaruh disekitarnya. PIN.2 bisa berlogika HIGH, bisa juga berlogika LOW, ini artinya logika PIN.2 mengambang (floating). Kondisi floating biasanya diperlukan saat PIN sebuah mikrokontroler dihubungkan ke suatu sensor. Karena jika di pullup, dikhawatirkan kondisi logik PIN tersebut mengganggu kondisi logik pin-pin sensor yang bersangkutan. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 23 Perhatikan contoh-contoh berikut... DDRA=0x00; PORTA = 0xFF; Ini berarti seluruh pin-pin pada PORTA dijadikan sebagai masukan dan di-pullup, artinya pada rangkaian yang terkait, jika menggunakan tombol atau pushbutton, jika tidak ditekan akan terbaca HIGH dan jika ditekan akan terbaca LOW. Gunakan contoh rangkaian pada Gambar 15 dan perhatikan tanda panah, pushbutton satu ujung dihubungkan ke pin yang terkait sedangkan ujung lainnya di-GND-kan. INGAT! Ini bukan satu-satu-nya cara membuat rangkaian masukan dengan pushbutton, tetapi ini cara yang mudah dan murah meriah... he he he... Contoh lainnya... DDRB= 0x00; PORTB=0x0F; Ini artinya seluruh pin-pin PORTB dijadikan masukan, dengan konfigurasi 0x0F (0b00001111) atau PORTB.0 sampai PORTB.3 di-pullup, sedangkan PORTB.4 sampai PORTB.7 dikonfigurasi floating. 5.3. Register PINx Digunakan untuk membaca masukan pada pin yang bersangkutan, akan dijelaskan pada contoh program di halaman-halaman berikutnya. Gambar 15. Contoh rangkaian aktif rendah tombol pushbutton. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 24 6. Latihan Tahap-I 6.1. Percobaan-1: LED berkedip-kedip Percobaan pertama ini menggunakan rangkaian yang ditunjukkan pada Gambar 16 10, sedangkan contoh penempatan LED dan pushbutton (percobaan-3) pada AVR Trainer v2.0 ditunjukkan pada Gambar 17. Gambar 16. Rangkaian LED pada PORTB mikrokontroler ATMega16 Gambar 17. Penempatan LED dan Pushbutton pada AVR Trainer v2.0 10 Gambar AVR Trainer v2.0 selengkapnya ada di cover dari ebook ini! Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 25 Listing program ditunjukkan sebagai berikut... Penjelasan: Baris 1 – 4 merupakan deklarasi untuk definisi kristal yang digunakan, yaitu 11.0592MHz11. Pustaka apa saja yang digunakan (baris 2 dan 3) dan alias untuk PORTB sebagai led (baris 4); Baris 7- 10 merupakan subrutin untuk inisialisasi PORTB sebagai luaran (baris 9). Perhatikan bahwa DDRB diberi logika 1 semua (=0xFF atau 255 desimal); Program utama ditunjukkan pada baris 13 – 23, diawali dengan inisialisasi port (baris 15), kemudian dilakukan pengulangan tak-hingga (baris 16); Yang dilakukan adalah menyalakan LED, dengan cara memberikan logika 1 (baris 18), kemudian melakukan penundaan 1 detik (baris 19), kemudian mematikan LED dengan logika 0 (baris 20) dan diakhiri dengan penundaan 1 detik (baris 21); Demikian seterusnya, LED akan berkedip-kedip dengan tundaan 1 detik. 6.2. Percobaan-2: Membunyikan buzzer! Masih menggunakan rangkaian yang sama seperti sebelumnya, sekarang buzzer juga akan dibunyikan, penempatan buzzer pada AVR Trainer v2.0 dtinjukkan pada Gambar 18. Gambar keseluruhan dari AVR Trainer v2.0 bisa dilihat di cover ebook ini. 11 Silahkan membaca artikel saya yang menjelaskan tentang masalah sistem clock pada mikrokontroler AVR di http://agfi.staff.ugm.ac.id/blog/index.php/2009/12/mengenal-system-clock-pada-mikrokontroler-avr/ Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 26 Gambar 18. Buzzer pada AVR Trainer Board v2.0 Perhatikan listing berikut ini... Penjelasan: Baris 2 – 5 sama seperti penjelasan pada percobaan-1; Baris 8 dan 9 digunakan untuk mendeklarasikan suatu instruksi untuk memberikan nilai pada PORTA.7 dengan nilai logika 1 (baris 8) dan logika 0 (baris 9); Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 27 Selebihnya adalah program utama (baris 19 – 31), silahkan Anda pelajari dengan seksama. 6.3. Percobaan-3: Aplikasi Pushbutton untuk ON/OFF LED Kali ini menggunakan rangkaian pushbutton yang terhubung ke PORTB (ditunjukkan pada Gambar 15. Ada 2 tombol, satu untuk menyalakan LED dan yang .lain untuk mematikan LED, berikut listing programnya... Penjelasan: Baris 1 - 4 sudah jelas khan? Belum? Ya monggo, silahkan lihat dulu atau baca lagi penjelasan dari percobaan-percobaan sebelumnya, jika sudah paham silahkan kembali lagi kesini... Baris 6 – 8 digunakan untuk mendeklarasikan 3 macam alias, yaitu ‘tombol’, ‘satu’ dan ‘dua’. Jika Anda perhatikan, khusus tombol didefinisikan sebagai register PIND, sebagaimana janji saya sebelumnya register PINx saya jelaskan disini, yaitu digunakan untuk membaca masukan. Artinya untuk memberikan luaran melalui register PORTx sedangkan untuk membaca masukan gunakan register PINx; Perhatikan sekarang pada rutin init_devices() yang berbeda dengan sebelumnya (baris 11 – 18): o DDRB=255 sama seperti sebelumnya, PORTB semuanya dijadikan sebaga saluran luaran; o PORTD.2 dan PORTD.3 digunakan sebagai saluran masukan, sehingga harus diberi logika ‘0’, caranya bagaimana? Anda bisa langsung memberikan instruksi DDRD = 0b00001100 atau DDRB = 0x0C; Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 28 DDRD &= ~(1<<2) untuk PORTD.2 (tanda ‘~” artinya NOT), dan DDRD &= ~(1<<3) untuk PORTD.3, perhatikan masing-masing baris 14 dan 15; o Karena rangkaian pushbutton menggunakan konfgurasi active low12, maka kedua pin tersebut diaktifkan pullup-nya, menggunakan instruksi masing-masing PORTD |= (1<<2) untuk PORTD.2 dan PORTD |= (1<<3) untuk PORTD.3, perhatikan baris 16 dan 17. Program utama dimulai dari baris 20 hingga 29: o Diawali dengan inisialisasi device pada 22; o Dilanjutkan dengan mematikan semuan led, baris 23; o Yang diulang-ulang terus menerus menggunakan instruksi for (;;) {..}, sebagaimana dituliskan pada baris 24 hingga 28, adalah proses memeriksa apakah tombol yang dihubungkan ke PIND.2 ditekan? Atau justru tombol di PIND.3 yang ditekan: Jika tombol yang ada di PIND.2 ditekan maka led dinyalakan semua (baris 26), sebaliknya Jika tombol yang ada di PIND.3 ditekan maka led dimatikan semua (baris 27)! o Mudah bukan? 7. Timer/Counter pada Mikrokontroler AVR Timer/Counter dalam mikrokontroler merupakan fasilitas yang salah satu fungsinya dapat digunakan sebagai pewaktu atau cacahan suatu event. Sumber clock atau pemicau dapat dibangkitkan dari sinyal eksternal maupun internal. Jika sumber sinyal pemicu atau clock berasal dari internal maka Timer/Counter berfungsi sebagai pewaktu atau timer dan jika sumber sinyal berasal dari luar maka disebut sebagai pencacah atau counter. Mikrokontroler ATMega16 memiliki 3 buah timer yaitu Timer0, Timer1 dan Timer2. Timer0 dan Timer2 memiliki kapasitas 8-bit sedangkan Timer1 memiliki kapasitas 16-bit. Apa yang dimaksud timer 8 bit dan 16 bit? Timer 8-bit adalah pewaktu yang bisa mencacah atau menghitung hingga maksimal nilai 0xFF heksa (dalam biner = 11111111). Timer 16-bit sama seperti timer 8-bit, hanya saja nilai maksimalnya mencapai 0xFFFF. Pada ebook ini akan dibahas mengenai Timer1, 16-bit, dan untuk dapat menjalankan atau menggunakan Timer1 ini, maka kita harus mempelajari terlebih dulu register-register yang berkaitan dengan Timer1 karena di register itulah tempat pengaturan Timer/Counter1 agar bisa bekerja. Pada Gambar 19 ditunjukkan diagram blok dari Timer1 16-bit, terlihat adanya beberapa register yang terkait, antara lain (dari atas): TCNT1, OCR1A, OCR1B, ICR1, TCCR1A, TCCR1B dan juga beberapa bit-bit terkait seperti: TOV1, OC1A, OC1B dan ICF1. 12 Jika ditekan bernilai logika ‘0’. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 29 Gambar 19. Diagram blok TIMERn (n diganti dengan 1) Register Timer1 yang akan kita libatkan di awal ini adalah: TCCR1B TCNT1 TIMSK TIFR Register TCCR1B, ditunjukkan pada Gambar 20, merupakan tempat pengaturan clock yang intinya agar Timer/Counter1 bisa bekerja, maka register TCCR1B ini jangan sampai diisi dengan 0x00 (dikosongkan). Gambar 20. Register TCCR1B Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 30 Kok tidak boleh berisi 0x00 atau semua bit pada TCCR1B nol semua? Coba perhatikan Tabel 1. Sumber clock bisa berasal dari internal mulai dari prescaler 1 hingga 1024 atau bisa juga dari sumber eksternal, semua bisa diatur sesuai atau mengikuti aturan pada Tabel 1. Apa nilai praskalar itu? Timer1 (juga timer/counter lainnya) membutuhkan sumber detak atau clock source. Biasanya sumber detak yang biasa kita pakai berasal dari XTAL. Besarnya maksimum sama dengan XTAL yang digunakan dan minimum XTAL/1024. Nah nilai pembagi atau 1024 inilah yang disebur nilai praskalar atau prescaler. Apa yang terjadi jika semua bit di TCCR1B nol semua? Artinya bit 0, 1 dan 2 juga nol semua, perhatikan Gambar 19, itu artinya CS12=0, CS11=0 dan CS10=0 dan itu menurut Tabel 1 “No clock source (Timer/Counter stopped)” Timer berhenti bekerja! Atau tidak bekerja!! Tabel 1. Konfigurasi sumber clock atau detak pada TCCR1B Tiga bit (CS12, CS11 dan CS10) ini dulu yang kita perhatikan... Okey! Register TCNT1 merupakan register pencacah, artinya nilai di dalamnya akan dinaikkan setiap kali ada pemicu, bisa tepi naik atau tepi turun. Jika sumbernya dari dalam (internal) pencacahan dilakukan pada saat tepi naik. Register ini akan mencacah naik dari 0x0000 sampai nilai max 0xFFFF kemudian di-reset kembali lagi ke 0x0000. Overflow (melimpah) terjadi saat kondisi dari 0xFFFF ke 0x0000, sehingga mengakibatkan bit TOV1 pada register TIFR akan di-set (diberi logika 1). Kondisi overflow juga bisa digunakan untuk menjalankan interrupsi. Register TIMSK, yang ditunjukkan pada Gambar 21, merupakan register tempat pengaturan interupsi overflow dari Timer/Counter1 yang ingin diaktifkan atau tidak. Dengan memberikan logika 1 pada bit TOIE1 (bit-2 pada TIMSK), maka interupsi Timer/Counter1 aktif dengan catatan bit interupsi global diaktifkan (bit-7 di register Status SREG, perhatikan Gambar 22). Perhatikan juga bit-bit lain yang berkaitan dengan masing-masing Timer: Timer/Counter-0: OCIE0 dan TOIE0 – masing-masing bit 1 dan 0; Timer/Counter-1: TICIE1, OCIE1A, OCIE1B dan TOIE1 – masing-masing bit 5, 4, 3 dan 2; Timer/Counter-2: OCIE2 dan TOIE2 – masing-masing bit 7 dan 6; Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 31 Gambar 21. Register TIMSK Gambar 22 Register SREG Penjelasan register SREG13: I – Global Interrupt Enable: digunakan untuk mengaktifkan interupsi menyeluruh (global); T – Bit copy storage H – Half Carry Flag S – Sign bit V – Two’s Complement Overflow Flag N – Negative flag Z – Zero flag C – Carry flag Sedangkan register TIFR (Timer/Counter Interrupt Flag Register), sebagaimana ditunjukkan pada Gambar 23, digunakan sebagai indikator atau penanda apakah sudah terjadi overflow atau belum. Pada Timer/Counter1, kondisi overflow ditandai dengan logika 1 pada bit TOV1 (bit-2) pada register TIFR. Gambar 23. Register TIFR Persamaan untuk mencari waktu jeda yang ingin digunakan adalah berdasarkan nilai awal yang harus dimasukkan ke dalam TCNT1, gunakan persamaan berikut: TCNT1 = (1+0xFFFF) - (waktu *( XTAL / praskalar) ) Waktu waktu yang diinginkan XTAL frekuensi kristal yang dipakai praskalar nilai prescaler (lihat penjelasan berikut ini) 13 Hanya saya tuliskan yang terkait saja, selengkapnya silahkan merujuk datasheet ATMega16. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 32 7.1. Percobaan-4: Menggunakan Timer1 Menyalakan dan mematikan LED pada PORTB dengan jeda 1 detik menggunakan Timer1. Bedakan dengan Percobaan-1 dan 2 yang hanya menggunakan fungsi delay yang sama sekali tidak menggunakan fasilitas Timer/Counter. Okey, sekarang kita cari dulu nilai TCNT1-nya... Nilai XTAL-nya 11,0592MHz atau 11.059.200Hz; Nilai praskalarnya 1024; Waktu yang diinginkan 1 detik, maka Gunakan TCNT1 = (1+0xFFFF) - (waktu *( XTAL / prescaler) ), jadi... TCNT1 = = = = = (1+65535)-(1detik * (11059200/1024)) 65536 - (1detik*10800) 65536-10800 54736 (desimal) D5D0 (heksadesimal) Alternatif lain, Anda bisa menggunakan programnya AVR Timer yang bisa diunduh melalui website http://www.techideas.co.nz. Langkah-langkah penggunakan program ini kita jelaskan berikut: 1. Setelah mengunduh program AVR Timer dari http://www.techideas.co.nz, langkah selanjutnya adalah menjalankan AVRTimer1Clac.exe untuk perhitungan atau kalkulasi Timer1; 2. Lakukan pengisian beberapa nilai sebagaimana ditunjukkan pada Gambar 23, menyesuaikan dengan kebutuhan yang telah kita tetapkan tadi: a. Frekuensi kristal: 11,0592MHz atau ditulis 11.059.200 Hz; b. Pilih nilai prescale sebesar 1024; c. Isikan Timer1 Interrupts per second (berapa kali interupsi/detik) sebesar 1 kali; d. Perhatikan hasilnya (Gambar 24). Gambar 24. Contoh penggunaan ATMega Timer Calculator – TIMER1 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 33 Listing programnya... Penjelasan: Program ini pada dasarnya sama seperti percobaan-1, hanya saja sekarang tundaan atau jeda menggunakan fasiltas Timer1 yang ada di ATMega16; Cukup saya jelaskan saja subrutin delay1detik(), yang lainnya sama seperti penjelasan percobaanpercobaan sebelumnya: o Baris-15 merupakan pengisian register TCCR1B agar digunakan nilai prescale sebesar 1024, artinya nilai kristal 11,0592MHz dibagi dengan 1024, sekaligus mengaktifkan Timer1; o Baris-16 memberikan nilai awal pada TCNT1 sesuai dengan perhitungan atau kalkulasi yang telah dilakukan sebelumnya, yaitu mengisi dengan nilai awal 54.736 (desimal) atau 0xD5D0 (heksadesimal); o Baris-17 menunggu hingga terjadi overflow – ini merupakan proses pooling bukan interupsi; o Jika sudah terjadi overflow atau melimpah, maka flag TOV1 di-reset (baris 18) dan Timer1 dimatikan (baris 19). Gampang tho!? Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 34 7.2. Percobaan-5: Menggunakan Timer2 Okey sekarang saya tunjukkan contoh lainnya menggunakan Timer2 dan penggunaan AVRTimer2Calc ditunjukkan pada Gambar 25. Untuk 10 milidetik diisi 100 kali interupsi per detik. Gambar 25. Contoh penggunaan ATMega Timer Calculator – TIMER2 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 35 Penjelasan (waktu ngisi titik-titik jangan lihat kuncinya dulu ya): Percobaan-5 ini sebenarnya juga mirip/sama dengan percobaan-4 (sebelumnya), hanya saja digunakan fasilitas Timer2 untuk melakukan penundaan 1 detik; Anda perhatikan pada 12 hingga 28: o Terdapat ....14 subrutin yaitu delay10ms() dan ........................15; o Mengapa kok tidak langsung dilakukan tundaan 1 detik? Mengapa harus melakukan pengulangan ....16 kali subrutin delay10ms()? Perhatikan baris 24 – 27; o Ingat, Timer2 merupakan timer ....17 bit, artinya dengan kemampuan seperti itu tidak bisa dilakukan langsung tundaan 1 detik, cara paling gampang untuk mendapatkan tundaan 1 detik atau 1.000 milidetik adalah mengulang 100 kali tundaan 10 milidetik; o Perhatikan register TCCR2 bit 0, 1 dan 2 pada Gambar 23. Kemudian perhatikan juga Tabel 2 untuk semua kemungkinan nilai CS22, CS21 dan CS20. o Nilai prescale yang digunakan, mengikuti Tabel 2, perhatikan pada baris 14, adalah sebesar ....18 atau nilai clock dibagi dengan nilai prescale tersebut; o Agar terjadi penundaan sekitar 10 milidetik, maka nilai register TCNT2 (pada baris 15) diberi nilai sebesar .....19 heksadesimal atau .......20 desimal; Gambar 26. Register TCCR2 o Baris 16 digunakan untuk menunggu terjadinya ......................21 pada Timer2, kemudian bit overflow tersebut direset (baris-17). 14 Jawaban: 2 (dua) Jawaban: delay1detik() 16 Jawaban: 100 (seratus) 17 Jawaban: 8 (delapan) 18 Jawaban: 1024 19 Jawaban = 94 20 Jawaban = 148 (seratus empat puluh delapan) 15 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 36 o Timer2 kemudian dihentikan dengan memberi nilai .........22 pada register TCCR2. Tabel 2. Konfigurasi sumber clock atau detak pada TCCR2 7.3. Percobaan-6: Menggunakan Timer0 Bagaimana kalau menggunakan Timer0? Pengaturan pewaktuan menggunakan AVRTimer0Calc ditunjukkan pada Gambar 27. Untuk penundaan 10 milidetik sebanyak 100 kali, parameter-nya sama seperti Timer2. Gambar 27. Contoh penggunaan ATMega Timer Calculator – TIMER0 21 22 Jawaban: overflow Jawaban: 0 (nol) atau 0x00 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 37 Berikut listing programnya... Penjelasan: Silahkan tulis beberapa paragraf yang menjelaskan program ini – mengikuti kaidah-kaidah yang sudah dijelaskan sebelumnya... 8. Komunikasi Serial Komunikasi serial pada mikrokontroler AVR menggunakan fasilitas USART singkatan dari Universal Syncronous and Asyncronous Receiver Transmitter sangat handal dan berguna dalam berbagai aplikasi yang berhubungan antarmuka komunikasi serial dengan PC atau sesama Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 38 mikrokontroler AVR atau bahkan mikrokontroler lain yang memiliki fasilitas komunikasi serial, misalnya program pemantauan suhu ruangan sekaligus pengontrolan AC atau kipas menggunakan antarmuka program PC Visual Basic atau Delphi, dan lain-lain. Jalur komunikasi serial pada mikrokontroler AVR ATMega16/32/8515 terdapat pada pin PORTD.0 (RXD) dan PORTD.1 (TXD), perhatikan pin-pin yang terkait pada Gambar 4 dan 5. Diagram bloknya ditunjukkan pada Gambar 28. Gambar 28. Diagram blok fasilitas komunikasi serial AVR Berikut fitur-fitur komunikasi serial atau USART pada ATMega16: • • • • • • • Full Duplex Operation (Independent Serial Receive and Transmit Registers) Asynchronous or Synchronous Operation Master or Slave Clocked Synchronous Operation High Resolution Baud Rate Generator Supports Serial Frames with 5, 6, 7, 8, or 9 Data Bits and 1 or 2 Stop Bits Odd or Even Parity Generation and Parity Check Supported by Hardware Data OverRun Detection Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 39 • • • • • Framing Error Detection Noise Filtering Includes False Start Bit Detection and Digital Low Pass Filter Three Separate Interrupts on TX Complete, TX Data Register Empty, and RX Complete Multi-processor Communication Mode Double Speed Asynchronous Communication Mode Pembahasan komunikasi serial USART dipisahkan menjadi 3 bagian yaitu Penghasil detak (clock generator), Mengirim data (Data Transmit) dan Menerima data (Data Receive). 8.1. Penghasil Detak - Clock Generator Penghasil detak atau Clock Generator tergantung pada mode data transfer, yaitu terdapat 4 (empat) mode penghasil detak, yaitu: • • • • Normal asynchronous; Double Speed asynchronous; Master synchronous, dan Slave synchronous. Pada Gambar 29 ditunjukkan diagram blok logik penghasil detak yang terkait dengan beberapa register seperti UBRR (16-bit: UBRRL dan UBRRH) dan lain-lain. Gambar 29. Diagram blok logik penghasil detak untuk komunikasi serial Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 40 Kebanyakan yang digunakan adalah Asynchronous Internal Clock Generator. Register penentuan baudrate atau kecepatan komunikasi serial atau UBRR digunakan dimana nilai yang diberikan adalah untuk down-counter. Setiap kali nilai down-counter mendekati nol, maka sebuah clock dibangkitkan. Anda bisa menghitung berapa nilai UBRR yang sesuai dengan baudrate yang diinginkan mengacu pada osilator atau kristal yang digunakan oleh mikrokontroler menggunakan persamaan BAUD = fclk/(16(UBRR+1)) Persamaan ini digunakan untuk Asynchronous Normal Mode, jika menggunakan mode Double Speed Asynchronous, maka persamaan yang digunakan adalah BAUD = fclk/(8(UBRR+1)) Informasi detil tentang clock generator ini bisa dilihat di datasheet AVR ATMega16. Anda bisa juga memanfaatkan website http://www.wormfood.net/avrbaudcalc.php untuk menghitung secara online. Misalkan digunakan frekuensi osilator untuk mikrokontroler sebesar 8 MHz (atau 8.000.000 Hz) dan baudrate yang diinginkan adalah 9600, setelah dihitung menggunakan persamaan diatas diperoleh nilai UBRR sebesar 51,083333333, kita bulatkan menjadi 51. Dengan nilai UBRR =51, maka nilai seseungguhnya dari baudrate adalah 9615 (bukan 9600), jika dibagi dengan 9600 diperoleh 1.0016 dan karena itu error-nya adalah 0.16%. Dengan error tersebut USART masih dapat bekerja tetapi tidak sempurna. Anda bisa menggunakan AVR Assistant yang dibuat oleh Mike Henning (bisa Anda unduh program tersebut di http://www.esnips.com/web/AtmelAVR), program ini juga bisa digunakan sebagai alternatif dari AVR Timer Calculator yang telah dijelaskan sebelumnya. Tampilan awal ditunjukkan pada Gambar 30. Gambar 30. Contoh penggunaan AVR Assistant v1.3 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 41 Penjelasan Gambar 30: • • Bagian kiri digunakan untuk mengatur baudrate, sedangkan bagian kanan digunakan untuk mengatur Timer0, 1 dan 2 (jadi satu antarmukanya); Contoh untuk baudrate 9600, dengan kristal 8MHz, hasil perhitungannya ditunjukkan pada Gambar 31 kiri, sedangkan untuk kristal 7,372MHz ditunjukkan pada Gambar 31 kanan. Perhatikan perbedaan error %-nya. Gambar 31. Contoh penggunaan AVR Assistant v1.3 untuk dua frekuensi MPU berbeda • Untuk contoh pengaturan Timer1 agar menunda interupsi terjadi 100 kali per detik (seperti kasus timer yang dijelaskan sebelumnya), dengan frekuensi kristal 11,059MHz, ditunjukkan pada Gambar 32. Gambar 32. Contoh penggunaan untuk TIMER1 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 42 Untuk mengatasi ketidak-akuratan baudrate tersebut, biasanya digunakan kristal dengan frekuensi 7,372MHz atau 11,0592MHz. Perhatikan informasi selengkapnya untuk nilai UBRR di Tabel 3. Tabel 3. Nilai-nilai UBRR dengan 8MHz, 7,372MHz dan 11,0592MHz23 Berikut adalah subrutin yang digunakan untuk menghitung nilai UBRR pada winAVR GCC Variabel MYUBRR digunakan untuk menyimpan nilai UBRR setelah dilakukan perhitungan sebagaimana ditunjukkan pada listing tersebut. Pemanggilannya menggunakan instruksi initserial(MYUBRR); 23 Hasil perhitungan dari http://www.wormfood.net/avrbaudcalc.php Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 43 8.2. Mengirim Data – USART Transmitter Pengirim USART atau UASRT Transmitter dapat diaktifkan dengan memberikan logika satu di bit TXEN yang terdapat dalam register UCSRB pada bit-3, perhatikan register UCSRB yang ditunjukkan pada Gambar 33. Gambar 33. Register UCSRB Saat bit TXEN diberi logika 1, artinya USART Transmitter diaktifkan, dengan demikian pin TxD pada PORTD.1 hanya bisa digunakan untuk pengiriman data pada komunikasi serial. Lakukan terlebih dahulu inisialisasi baudrate, mode kerja dan format data sebelum mengirimkan data-data melalui port serial. Untuk mengatur berapa stop bit, digunakan USBS pada register UCSRC, sedangkan mengatur lebar bit data digunakan UCSZ2 (di register UCSRB), UCSZ1 dan UCSZ0 (di register UCSRC) mengikuti Tabel 4. Gambar 34. Register UCSRC Tabel 4. Jumlah data bit yang ditentukan UCSZ2..0 Jika Anda menggunakna mode sinkron, maka pin XCK (PORTB.0) hanya boleh digunakan untuk mengirimkan detak atau clock transmisi. Berikut adalah subrutin yang digunakan untuk mengaktifkan UASRT Transmitter pada winAVR GCC. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 44 Penjelasan: Perhatikan baris 12 (selain TXEN=1, sekaligus untuk mengakifkan UASRT Receiver di RXEN=1). Format datanya 8-bit data (lihat Tabel 4) dengan instruksi (3<<UCSZ0), 1-bit stop dengan instruksi (1<<USBS). Karena UCSRC menggunakan lokasi yang sama dengan UBBRH, maka URSEL harus diberi logika 1 untuk mengakses UCSRC dengan instruksi (1<<URSEL). Berikut adalah subrutin (b dan uart_putc()) yang digunakan untuk mengirimkan sebuah data (karakter) Penjelasan: Pada subrutin pertama, uart_putc(), data dikirimkan dengan cara menuliskan sebuah kode karakter ke register UDR, perhatikan Gambar 35, perhatikan baris 19; Namun sebelum menuliskan atau mengisi register UDR, ditunggu dulu nilai bit UDRE (bit5) pada register UCSRA (Gambar 36) agar bernilai 1 (satu), maksudnya jika UDRE=1 berarti UDR-nya kosong dan siap mengirim data berikutnya, perhatikan baris 18; Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 45 Gambar 35. Register UDR Read dan Write Gambar 36. Register UCSRA Subrutin kedua, yaitu uart_puts() digunakan untuk mengirimkan serangkaian data (tidak hanya satu karakter saja), perhatikan terjadinya pengulangan subtrutin uart_putc() pada baris 27 dan 28. 8.3. Menerima Data – USART Receive Untuk menerima data, USART Receiver dapat kita aktifkan dengan memberikan logika 1 pada bit RXEN yang terdapat dalam register UCSRB, perhatikan kembali Gambar 33. Saat bit RXEN diberi logika 1, artinya USART Reciever diaktifkan, dengan demikian pin RxD pada PORTD.0 hanya bisa digunakan untuk penerimaan data pada komunikasi serial. Berikut adalah cara yang digunakan untuk menerima data (karakter), ada di dalam program utama (main()): Untuk menerima data caranya mudah, yaitu dengan memeriksa apakah bit RXC (bit ke 7) pada register UCSRA bernilai 1? Perhatikan Gambar 36 dan baris 50. Jika RXC bernilai 1 artinya UDR Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 46 berisi data yang diterima secara serial, sehingga setelah terdeteksi RXC=1, dilanjutkan dengan menyalin isi UDR ke suatu variabel (pada contoh digunakan tempserial), sebagaimana ditunjukkan pada baris 52. 8.4. Percobaan-7: Komunikasi Serial Percobaan komunikasi serial ini bertujuan menampilkan dua kalimat pembuka dan mengirim kembali apapun yang diketikkan melalui terminal serial (hasil-nya ditunjukkan pada Gambar 37), misalnya, jika diketik “a”, maka karakter “a” ini dikirim kembali ke serial, perhatikan baris 52 dan 53 pada listing program berikut: Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 47 Gambar 37. Ragkaian untuk komunikasi serial dan contoh running hasil aplikasi Konektor komunikasi serial pada AVR Trainer Board v2.0 ditunjukkan pada Gambar 38. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 48 Gambar 38. Koneksi serial RS232 pada AVR Trainer Board v2.0 9. Setelah Ini kemana? Masih banyak yang harus dipelajari selain I/O dasar dan Timer/Counter pada Mikrokontroler AVR, antara lain interupsi, antarmuka I2C (misalnya EEPROM eksternal, RTC DS1307, dan lain sebagainya), akses EEPROM internal, ADC dan lain sebagainya. Silahkan ikuti pelatihan mikrokontroler AVR di http://klikdisini.com/pelatihanavr! Apa saja yang akan Anda dapatkan dalam pelatihan tersebut? Silahkan klik link tersebut! Catatan: Saran dan masukan untuk ebook ini silahkan kirim email ke [email protected], terima kasih! --- selesai --- INFORMASI TENTANG PELATIHAN MIKROKONTROLER Hanya dengan minimal 5 JAM24 (karena langsung dibimbing oleh Pakarnya) Anda bisa memahami konsep dasar dan membuat aplikasi mikrokontroler AVR! Ditambah dengan konsultasi GRATIS Anda bisa meningkatkan kemampuan Anda dalam mikrokontroler AVR! Anda juga bisa menghasilkan INCOME TAK TERBATAS! Dengan memanfaatkan kemampuan Anda di bidang mikrokontroler! Pelatihan yang saya selenggarakan memberikan konsep dasar dan tip/trik pembuatan aplikasi mikrokontroler AVR! Informasi & pendaftaran silahkan akses ke 24 http://klikdisini.com/pelatihanavr Waktu minimal pelatihan, Anda juga bisa menambah jumlah jam jika masih merasa kurang – tingkat lanjut! Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 49 INFORMASI PERANGKAT KERAS UNTUK BELAJAR MIKROKONTROLER AVR Anda mengalami kesulitan dalam belajar Mikrokontroler AVR?? Bingung memilih/menentukan hardware yang bisa dipakai dengan mudah untuk belajar Mikrokontroler AVR? Pengin yang simpel, murah dan komplit untuk belajar Mikrokontroler AVR? Kekhawatiran Anda akan berakhir! Kesulitan Anda akan segera teratasi Apa yang Anda cari akan segera ditemukan! Dapatkan PENAWARAN ISTIMEWA selama promosi! Dapatkan informasi selengkapnya di http://klikdisini.com/jualavrbasic Saya tersugesti, klo baca bukunya pak agfi, saya baru bisa paham... padahal saya juga uda punya buku mikro yg lain, spt nya gak enak, klo gak baca punya pak agfi, aneh memang... Teguh Budiman Waduh, emang sip banget penjelasannya pak Agfi, salah satu yang saya kagumi dari pak Agfi adalah kalo pak Agfi njelasin sesuatu pasti dengan ringkas, padat, berisi, to the point dan mudah di mengerti.. saya juga senang baca buku-bukunya pak Agfi lho, nah.. itu adalah tanda-tanda dari dosen, entrepreneur dan sekaligus penulis yang profesional..| salut dah buat pak Agfi.. Seandainya sebagian besar dosen bisa aktif seperti pak Agfi, pasti Indonesia makin maju neh.. Herlambang (http://indomicron.co.cc) Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 50 Bonus-1: Hasil kompilasi Flowcode AVR 3.0 yang unik?! Kali ini saya coba-coba menggunakan perangkat lunak Flowcode AVR versi 3.025 (tampilan awal ditunjukkan pada Gambar 1.1) untuk melakukan kompilasi program mikrokontroler AVR hanya dengan menggambarkan diagram alir atau flowchartnya. Apaan? Cukup pake diagram alir? Yup betul! Gambar 1.1 Baiklah, untuk percobaan, saya buka berkas baru dengan tampilan seperti Gambar 1.2. Tampak awal dari diagram alir dan daftar pin dari mikrokontroler AVR ATmega32 yang saya gunakan sebagai contoh kali ini. Gambar 1.2 25 Pada saat ebook ini ditulis sudah tersedia versi 4.3.3.6, silahkan di-unduh di http://www.4shared.com/file/kTQ_NYyL/Flowcode_AVR_Professional_4366.html dan jika suka silahkan dibeli. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 51 Selanjutnya, singkat cerita saya buat sebuah diagram alir yang intinya menghidupan dan mematikan LED pada PORTA secara bergantian dengan selang 500 milidetik atau 0,5 setik (perhatikan Gambar 1.3). Hasilnya LED akan berkedip-kedip dengan tundaan 500 milidetik (tampilan simulasi pada Gambar 1.4). Gambar 1.3 Gambar 1.4 (kiri LED mati, kanan LED menyala) Justru yang saya ulas disini adalah hasil kompilasi yang aneh atau barangkali unik atau barangkali itulah ciri khas dari Flowcode AVR? Sebagaimana ditunjukkan pada Gambar 1.5 dan Gambar 1.6. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 52 Gambar 1.5 Pada Gambar 1.5 keunikan terjadi karena inisialisasi PORTA yang seharusnya cukup sekali saja dilakukan justru dilakukan pada tiap instruksi untuk mengirimkan nilai 0 (LED mati semua) dan 255 (LED hidup semua), perhatikan tanda panah pada Gambar 1.5. Mengapa tidak sekali saja yach? Mungkin untuk jaga-jaga kali yaaa…?? Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 53 Gambar 1.6 Pada Gambar 1.6 terjadi pengulangan instruksi yang sama persis (lihat tanda panah), kenapa tidak dibuat subrutin-nya skalian yach?? Kesimpulannya: Enakan pake ASM atau Native C langsung untuk membuat program mikrokontroler AVR, agar kita bisa langsung menulis kode-kode secara efisien dan efektif. Bagaimana dengan BASCOM AVR? Boleh-boleh saja, cuman tetap harus hati-hati… Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 54 Bonus-2: FlowCode AVR 3.0: Aplikasi I/O Sederhana Kali ini Flowcode AVR kita gunakan untuk mencoba membuat sebuah aplikasi sederhana yang melakukan pembacaan masukan di PORT A kemudian menampilkan hasil pembacaan tersebut, yang sebelumnya melalui suatu variabel DATANYA, ke PORT B. Rancangan Flowcode AVR-nya ditunjukkan pada Gambar 2.1. Gambar 2.1 Kemudian kita kompail dan disimulasikan hasilnya (juga) bisa dilihat pada Gambar 2.1 tersebut. Perhatikan bahwa tidak semua masukan PORT A kita buat berlogika 1, hanya A7, A5, A3 dan A1. Hasilnya juga tidak semua LED pada PORT B menyala, hanya sesuai dengan PORT A saja, yaitu B7, B5, B3 dan B1. Nah sekarang pertanyaannya: Bagaimana dengan hasil kompilasi dalam bahasa C-nya (juga dalam bahasa ASM-nya)? Berikut saya cuplik sebagian hasil kompilasi dalam bahasa C (baris 59-96), cukup yang utama dulu, selebihnya Anda bisa mencermati bahwa di awal program C-nya merupakan inisialisasi variabel, pemetaan mikrokontroler dan lain-lain. Perhatikan Gambar 2.2. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 55 Gambar 2.2 Pada cuplikan listing tersebut saya sudah memberikan catatan. Bagaimana dengan Anda? Apa yang dilakukan pada bagian inisialisasi, baris 76 dan 77? Instruksi MCUCSR = 0×00; digunakan untuk mereset (memberikan logika 0) pada semua bit di register MCUCSR (MCU Control and Register), perhatikan penjelasan pada Gambar 2.3. Sedangkan WDTCR = 0×10; digunakan untuk mematikan watchdog, perhatikan penjelasan register WDTCR (Watchdog Control Register) di Gambar 2.4. Langkah ini dilakukan oleh Flowcode AVR, menurut saya, untuk keamanan atau play safe saja. Karena kemungkinan kompailer C yang digunakan tidak mematikan watchdog secara otomatis (ada beberapa kompailer yang bisa melakukan-nya secara otomatis selama tidak secara eksplisit dinyatakan penggunaan watchdog). Listing program selebihnya adalah sesuai dengan yang diharapkan, baca masukan seperti pada baris 85, namun sebelumnya ada inisialisasi PORT A sebagai masukan, mengapa tidak langsung aja DDRA = 0×00? Kok harus di-AND-kan segala dengan 0, khan hasilnya sama saja logika-0 khan? Aneh? Kemudian dilanjutkan dengan mengirimkan isi variabel dari pembacaan PORT A ke PORTB, lihat baris 91, yang sebelumnya (juga) diawali dengan inisialisasi PORT B sebagai luaran (nah kalo ini caranya langsung). Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 56 Gambar 2.3 Gambar 2.4 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 57 Jika Anda berikan loop pada program, seperti pada Gambar 2.5, hasilnya juga sama saja, keunikan juga terjadi lagi seperti saya jelaskan pada artikel sebelumnya26. Gambar 2.5 Bonus-3: FlowCode AVR 3.0: Aplikasi LCD 2x16 karakter Wow enaknya belajar pemrograman aplikasi mikrokontroler AVR menggunakan Flowcode 3 for AVR sebagaimana sudah saya tulis artikel-nya sejak awal27. Kali ini dicoba membuat aplikasi dengan tampilan LCD 2×16, hanya sekedar menampilkan dua kalimat, masing-masing di baris-1 dan baris-2, diagram atau flow-nya ditunjukkan pada Gambar 3.1 (termasuk hasil simulasinya). Hasil kompilasi kedalam Bahasa C saya tunjukkan satu persatu. Pada bagian pertama, sebagaimana ditunjukkan pada Gambar 3.2, merupakan deklarasi fungsi-fungsi makro untuk menangani LCD (baris 66 - 74). Terdapat 9 macam fungsi makro LCD dan hanya 3 yang akan digunakan dalam program, yaitu: FCD_LCDDisplay0_Start(), digunakan untuk inisialisasi LCD; FCD_LCDDisplay0_PrintString(char* String, char MSZ_String), digunakan untuk menuliskan string, dan 26 27 Lihat pembahasan Bonus-1 Lihat pembahasan Bonus-1 dan Bonus-2 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 58 FCD_LCDDisplay0_Cursor(char x, char y), digunakan untuk menempatkan kursor dengan posisi kolom,baris). Gambar 3.1 Gambar 3.2 Untuk fungsi FCD_LCDDisplay0_Start() listing programnya ditunjukkan pada Gambar 3.3. Apa yang dilakukan oleh fungsi ini adalah melakukan inisialisasi tampilan LCD dengan antarmuka 4 bit data (Flowcode 3 AVR hanya menyediakan antarmuka 4-bit data LCD walaupun bisa juga digunakan rangkaian antarmuka 8-bit data LCD). Rangkaian yang digunakan menggunakan pemetaan PORT dan pin LCD sebagai berikut: Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 59 #define #define #define #define #define #define LCD_2360334_BIT0 LCD_2360334_BIT1 LCD_2360334_BIT2 LCD_2360334_BIT3 LCD_2360334_RS LCD_2360334_E 2 3 4 5 0 1 ` Gambar 3.3 Untuk fungsi FCD_LCDDisplay0_PrintString() listingnya ditunjukkan pada Gambar 3.4. Fungsi ini digunakan untuk menampilkan string ke LCD pada posisi kursor saat itu. Fungsi ini membutuhkan dua parameter, string yang akan ditampilkan dan jumlah karakter pada string tersebut. Gambar 3.4 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 60 Untuk fungsi FCD_LCDDisplay0_Cursor(char x, char y) listingnya ditunjukkan pada Gambar 3.5. Fungsi ini membutuhkan dua parameter yaitu x (untuk posisi kolom) dan y (untuk posisi baris), jika dituliskan FCD_LCDDisplay0_Cursor(0,1) artinya menempatkan kursor pada kolom pertama baris kedua, demikian seterusnya… Gambar 3.5 Nah program utama ditunjukkan pada Gambar 3.6. Diawali dengan inisialisasi register MCUCSR dan WDTCR pada baris 373 dan 374 (baca artikel saya sebelumnya28). Kemudian dilanjutkan dengan melakukan inisialisasi LCD (baris 381) menggunakan fungsi FCD_LCDDisplay0_Start(). Diikuti dengan menampilkan string “Halo Flowcode3 (baris 386, angka 14 merupakan jumlah karakter pada string yang bersangkutan), menempatkan kursor pada baris kedua kolom pertama (baris 391), menampilkan string “by ATMega32 (baris 396) dan diakhiri dengan infinite-loop atau kalang-takhingga (baris 399). Jika Anda perhatikan baik-baik pada ketiga fungsi tersebut, maka bisa Anda temukan pemanggilan fungsi lain yaitu LCD_2360334_RawSend(char nIn, char nMask), yang digunakan untuk mengirimkan satu karakter. Pendefinisian fungsi ini ada di dalam fungsi FCD_LCDDisplay0_GetDefines(). Program selengkapnya bisa diunduh disini29. 28 29 Lihat pembahasan Bonus-2 Klik http://www.4shared.com/file/HVLCKV_0/serial_lcd01.html Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 61 Gambar 3.6 Bonus-4: FlowCode AVR 3.0: Menghitung Sapi! Kali ini kita akan belajar membuat program menggunakan Flowcode AVR30 untuk menghitung sapisapi kita yang masuk kandang. Caranya bagaimana? Kita gunakan sensor detektor sapi melalui PORT A (yang disimulasikan menggunakan pushbutton) untuk mendeteksi sapi-sapi yang masuk ke kandang. Sensor ini akan memicu proses perhitungan jumlah atau cacah sapi. Sementara ini hasil perhitungan ditampilkan melalui LED pada PORT B, bisa juga melalui 7segmen biar keren, tapi itu entar aja dech. Silahkan membuat kerangka diagram alir menggunakan acuan Gambar 4.1. Pada blok Calculation masih kita kosongkan… Okey, langkah selanjutnya lakukan klik-ganda pada blok Calculation, sehingga dimunculkan kotak dialog yang ditunjukkan pada Gambar 4.2. Ganti nama “Calculation” (pada Display Name) menjadi “Total Sapi” (tanpa tanda petik). Kemudian lanjutkan menuliskan persamaan untuk menghitung total sapi sebagai berikut: TOTAL = TOTAL + SAPI (pada bagian isian Calculations). Perhatikan Gambar 4.3. 30 Pada saat ebook ini ditulis sudah tersedia versi 4.3.3.6, silahkan di-unduh di http://www.4shared.com/file/kTQ_NYyL/Flowcode_AVR_Professional_4366.html Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 62 Gambar 4.1 Gambar 4.2 Sensor detektor sapi disimulasikan menggunakan tombol tekan atau pushbutton yang dipasang pada PORTA.0. Jika tombol ditekan maka akan menghasilkan nilai 1 yang kemudian disimpan ke dalam variabel SAPI. Dengan demikian, penekanan tombol pada PORTA.0 akan menambah nilai TOTAL sebesar 1. Jika tidak ditekan, ya artinya nilai pada variabel SAPI tetap 0 (nol) dan tidak merubah nilai dari TOTAL, demikian seterusnya. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 63 Klik Variables pada kotak dialog Calculations untuk mulai mendefinisikan variabel-variabel yang terkait. Akan ditampilkan kotak dialog seperti pada Gambar 4.4. Gambar 4.3 Gambar 4.4 Sekarang kita lanjutkan dengan mendefinisikan variabel-variabel yang terkait tersebut. Variabel yang akan kita definisikan adalah TOTAL dan SAPI. Penggunaan kedua variabel ini sudah saya jelaskan sebelumnya, jika belum paham silahkan ditengok lagi, nanti baru kembali lagi kesini… Klik pada tombol Add New Variable… sehingga dimunculkan kotak dialog Create sebagaimana ditunjukkan pada Gambar 4.5. Ketik “SAPI” (tanpa tanda petik) pada isian Name of New Variable Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 64 dan pilih Byte pada Variable Type, akhiri dengan klik Ok. Lakukan hal yang sama untuk variabel TOTAL. Sehingga sekarang isi dari variabel kita seperti ditunjukkan pada Gambar 4.6. Gambar 4.5 Gambar 4.6 Klik Close, kemudian kembali lagi ke kotak dialog Calculations dan akhiri dengan klik Ok. Hasil dari diagram alir sampai tahap ini ditunjukkan pada Gambar 4.7. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 65 Gambar 4.7 Sekarang saatnya mengatur pengulangan (loop). Klik pada blok Loop sehingga ditampilkan kotak dialog seperti pada Gambar 4.8. Gambar 4.8 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 66 Silahkan Anda cermati kotak dialog tersebut, Anda bisa memilih antara Loop While dengan Loop Count. Pada isian Loop while, kita bisa mengisikan berbagai macam kondisi syarat pengulangan. Misalnya, tertulis angka 1 pada kotak dialog tersebut, artinya dianggap selalu benar, sehingga terjadilah pengulangan terus menerus (infinite loop). Atau Anda bisa mengisikan syarat-syarat tertentu untuk pengulangan, misalnya cacah < 4, cacah = 0 dan lain sebagainya. Perhatikan juga pilihan Test the loop at, yaitu Start dan End. Apakah pengujian dilakukan di awal pengulangan (Start) atau diakhir (End)? Hal ini tentu saja berpengaruh terhadap jumlah pengulangan yang terjadi. Isian Loop Count merupakan bentuk pengulangan yang pasti, berapa kali dilakukan pengulangan, Anda bisa mengisikan angka yang sesuai dengan kepentingan program. Sementara ini biarkan isian seperti itu, klik saja Cancel untuk membatalkan. Okey, kita lanjutkan dengan klik ganda pada blok Input, sehingga ditampilkan Gambar 4.9 (perhatikan 3 tanda panah-nya). Gambar 4.9 Ubah Display name (panah teratas) menjadi “Cek sensornya”. Klik tombol Variables… (sebelah kanan panah tengah), klik pada variabel SAPI dan klik tombol Use Variable. Perhatikan isian Port yang sudah terisi dengan PORT A dan ini sudah sesuai dengan program kita, so akhiri dengan klik Ok. Langkah selanjutnya adalah menentukan luaran melalui PORT B. Klik ganda pada blok Output. Mirip dengan cara menentukan masukan sebagaimana sudah saya jelaskan. Klik tombol Variables, pilih variabel TOTAL dengan cara yang sama seperti sebelumnya. Ganti isian Port menjadi PORT B. Hasil akhir dari diagram alir ditunjukkan pada Gambar 4.10. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 67 Gambar 4.10 Berikutnya adalah menambahkan tampilan LED pada Flowcode AVR untuk kepentingan simulasi. Klik pada ikon LED (ada di sebelah kiri atas gambar LED berjejer miring). Maka pada Flowcode AVR akan ditampilkan kotak LED, perhatikan (panah pada) Gambar 4.11. Untuk menghubungkan LED ini dengan PORT B, klik pada panah kebawah di LED dan pilih Component Connections…, sehingga ditampilkan kotak dialog seperti Gambar 4.12. Gantilah PORT A pada kotak dialog Component Connections.. tersebut dengan PORT B, bit 0 sampai dengan 7 untuk masing-masing LED. Sekarang tambahkan pushbutton pada Flowcode AVR dengan klik ikon Switch (di sebelah kanan ikon LED yang telah Anda klik sebelumnya). Perhatikan Gambar 4.13. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 68 Gambar 4.11 Gambar 4.12 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 69 Gambar 4.13 Kita atur Properties dari switch ini dengan klik tanda panah kebawah dan pilih Properties, sehingga ditampilkan Gambar 4.14. Jumlah pushbutton cuman 1, ganti angka pada Number of switch menjadi 1 (perhatikan tanda panah yang terkait). Lanjutkan dengan klik pada Tab Switch label dan ketik seperti pada Gambar 4.15. Okey, tugas membuat program sudah selesai, hasil akhir dari tampilan Flowcode AVR ditunjukkan pada Gambar 4.16. Selanjutnya sudah bisa dilakukan simulasi. Klik Run (tanda panah pada Gambar 4.16) dan nikmati hasilnya! Kenapa? Wow pencacahan dilakukan dengan sangat cepat, ketikan kli pada pushbutton LED pada PORT B berubah secara cepat (sekali)! Bagaimana mengatasinya? Sisipkan tundaan di dalam flowchart sebagaimana ditunjukkan pada Gambar 4.17. Kemudian jalankan lagi simulasinya… Listing program utama (main()) dalam Bahasa C ditunjukkan pada Gambar 4.18 Terima kasih...! Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 70 Gambar 4.14 Gambar 4.15 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 71 Gambar 4.16 Gambar 4.17 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 72 Gambar 4.18 Bonus-5: Animasi LED Mikrokontroler ATMega32 dengan C dan Assembly Artikel ini sengaja saya tulis sebagai awal pembelajaran bagaimana membuat sebuah program aplikasi mikrokontroler AVR (khususnya ATMega32 dengan frekuensi kristal 7,3728MHz) untuk membuat animasi LED berjalan dari pin 0 hingga 7. Rangkaian yang digunakan ditunjukkan pada Gambar 5.1, sengaja LED disusun secara CA atau common Anoda, sehingga untuk menyalakan LED harus dikirimkan logika ‘0 . Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 73 Gambar 5.1 Untuk kompilasi digunakan AVR Studio versi 4.0 (silahkan unduh GRATIS dari http://www.atmel.com). Program kita awali dengan beberapa macam deklarasi, keterangan sengaja saya masukkan dalam listing program untuk memudahkan pembelajaran langsung dari listingnya, perhatikan instruksi yang diawali dengan ‘.’ merupakan directive dari AVR Studio, bukan instruksi assembly mikrokontroler AVR: ;-----------------------------------------;animasi LED berjalan dalam bahasa Assembly ;untuk mikrokontroler Atmel AVR ATMega32 ;frekuensi kristal 7.3728MHz ;http://agfi.staff.ugm.ac.id ;-----------------------------------------.nolist ;bagian ini .include "m32def.inc" ;tidak perlu ditampilkan dalam .list ;berkas list Ingat berkas “m32def.inc” kita sertakan (directive .include) karena akan digunakan pustaka ATMega32 dalam program kita, tetapi tidak perlu disertakan dalam hasil berkas LIST-nya (hasil kompilasi program) menggunakan directive .nolist dan .list. Selanjutnya dilakukan inisialisasi awal: ;----------inisialisasi konstanta dan register .equ led=0b01111111 ;portb-7 ON .def temp=r16 ;temp sebagai alias untuk R16 ;====== program utama ==================== Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 74 .cseg .org 0000 ;awal kode program pada alamat 0x0000 Variabel LED digunakan untuk menyimpan data yang akan dikeluarkan melalui PORTA, awalnya diisi 0b01111111, artinya LED-0 akan dinyalakan terlebih dahulu. Variabel TEMP digunakan variabel alias untuk R16 (register-16), Anda boleh menggunakan nama alias apa saja, misalnya, tahu, brokoli, wortel dan lain sebagainya (emang buat sayur yach? he he he)… Program diawali dengan mendeklarasikan segmen kode (.cseg) dan dimulai alamat0×0000 (.org) ini paling logis kita siapkan di alamat tersebut, silahkan saja kalo mo diganti dengan alamat lain asalkan tidak konflik dengan kepentingan lainnya dalam program. Ragu-ragu? Ya sudah ikuti saja pake alamat 0×0000, aman dech…! Selanjutnya kita lakukan INISIALISASI STACK: ;menyiapkan alamat SP - Stack Pointer ;harus dituliskan sebagai inisialisasi SP pada RCALL ;jika tidak dilakukan program akan macet! ldi temp,low(ramend) out spl,temp ldi temp,high(ramend) out sph,temp Jika Anda lupa atau tidak melakukan inisialisasi stack, ada kemungkinan besar akan terjadi kemacetan pada program, artinya program seakan-akan stuck. Jika Anda menggunakan simulator semacam Proteus (yang pernah saya coba menggunakan Proteus 7.6 SP4), program akan berjalan tanpa kesalahan, namun ketika dicobakan ke rangkaian sesungguhnya program akan berhenti (stuck). Saran saya, ada baiknya tidak terlalu mengandalkan simulator mikrokontroler semacam Proteus, usahakan untuk mencoba di dunia nyata, di rangkaian sesungguhnya. Berikut cuplikan program untuk menginisialisasi stack di akhir ruang RAM (RAMEND). Karena STACK pada ATMega32 ukuran 16bit atau 2byte, maka pengisian SP dilakukan dua kali untuk SP Low atau SPL dan SP High atau SPH. Fungsi Low() dan High()masing-masing digunakan untuk mendapatka bagian LOW atau HIGH dari variabelRAMEND yang suda tersimpan dalam “m32def.inc”. Pengisian register pada AVR tidak bisa dilakukan langsung, dalam hal ini melalui variabel TEMP baru kemudian dipindahkan ke SPL dan SPH. Hal ini berlaku juga untuk penjelasan terkait berikut ini… Berikutnya, karena kita menggunakan mikrokontroler AVR, sudah wajib kita menentukan sebuah PORT sebagai masukan atau luaran, jika masing-masing bit pada register DDRx diberi nilai ‘1 artinya sebagai luaran (jika ‘0 sebagai masukan). Karena digunakan PORTA maka digunakan register DDRA (penulisan ke DDRA (out ddra,temp) tidak bisa langsung, sehingga digunakan variabel TEMP (ldi temp,0b01111111)): ;----------- inisialisasi port--------------------ldi temp,0b11111111 ;set semua bit register temp out ddra,temp ;tuliskan ke register DDRA Selanjutnya program utama dituliskan: ;--------portb telah di seting menjadi luaran -----ldi temp,led ;isi register temp dengan led7 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 75 sec putar: out rcall ror rjmp ;set carry flag (agar carry=1, LED mati) porta,temp tunda temp putar ;kirim data ke porta (LED) ;tunda sesaat 0.25 detik ;putar satu bit ke kanan melalui carry ;lompat ke label putar Data disimpan terlebih dahulu di variabel TEMP (ldi temp,led), kemudian baru dikeluarkan ke PORTA (out porta,temp), tidak bisa langsung dikirim ke PORTA. Untuk menggeser dan memutar bit pada variabel TEMP digunakan instruksi ROR (Rotate Right Using Carry), karena melewati Carry sedangkan Carry biasanya isinya ‘0 , maka harus diberi ‘1 dulu dengan instruksi SEC. Pengulangan dilakukan dengan melompat kembali ke label ‘putar’ menggunakan rjmp putar. Bagian akhir dari program adalah subrutin penundaan sekitar 0.25detik (lihat pada listing program lengkap). Kok bisa ya? Ya pake saja program AVR Delay Loop Generator, sebagaimana screen shoot-nya ditunjukkan pada Gambar 5.2, silahkan unduh gratis di-sini31. Memang menggunakan pengulangan register, penundaan 0.25 detik tidak akan akurat, tetapi lumayan buat melakukan penundaan sesaat. Jika Anda ingin akurat, gunakan fasilitas Timer/Counter pada mikrokontroler AVR yang bersangkutan. Gambar 5.2 Program selengkapnya sebagai berikut (ingat akhiri program dengan .exit)… 31 http://www.electronics-lab.com/downloads/cnt/fclick.php?fid=23 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 76 ;-----------------------------------------;animasi LED berjalan dalam bahasa Assembly ;untuk mikrokontroler Atmel AVR ATMega32 ;frekuensi kristal 7.3728MHz ;http://agfi.staff.ugm.ac.id ;-----------------------------------------.nolist ;bagian ini .include "m32def.inc" ;tidak perlu ditampilkan dalam .list ;berkas list ;----------inisialisasi konstanta dan register .equ led=0b01111111 ;portb-7 on .def temp=r16 ;temp sebagai alias untuk R16 ;====== program utama ==================== .cseg .org 0000 ;awal kode program pada alamat 0x0000 ;menyiapkan alamat SP - Stack Pointer ;harus dituliskan sebagai inisialisasi SP pada RCALL ;jika tidak dilakukan program akan macet! ldi temp,low(ramend) out spl,temp ldi temp,high(ramend) out sph,temp ;----------- inisialisasi port--------------------ldi temp,0b11111111 ;set semua bit register temp out ddra,temp ;tuliskan ke register DDRA ;--------portb telah di seting menjadi luara -----ldi temp,led ;isi register temp dengan led7 sec ;set carry flag (agar carry=1, LED mati) putar: out porta,temp ;kirim data ke porta (LED) rcall tunda ;tunda sesaat 0.25 detik ror temp ;putar satu bit ke kanan melalui carry rjmp putar ;lompat ke label putar ; ============================= ; delay loop generator ; 1843200 cycles: ; untuk frek 7.3728MHz ; penundaan 0.25 detik ; ----------------------------; delaying 1843182 cycles: tunda: ldi R17, $12 WGLOOP0: ldi R18, $A1 WGLOOP1: ldi R19, $D3 WGLOOP2: dec R19 brne WGLOOP2 dec R18 brne WGLOOP1 dec R17 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 77 brne WGLOOP0 ; ----------------------------; delaying 18 cycles: ldi R17, $06 WGLOOP3: dec R17 brne WGLOOP3 ; ============================= ret ; ============================= .exit ;akhir program Sedangkan dalam Bahasa C Native (menggunakan AVR Studio 4 dan GCC) ditunjukkan lengkap sebagai berikut: //======================================== // animasi LED di PORTA //========================================= #include #include //pustaka DELAY untuk frek 1MHz #define PORTLED PORTB //penentuan alias untuk PORTB #define DDRLED DDRB //penentuan alias untuk DDRB int main (void) { unsigned char temp=0x80; DDRLED=0xFF; while(1){ PORTLED=temp; _delay_ms(250); temp=(temp<<7)|(temp>>1);} return(0); } // data untuk LED // PORT sebagai luaran //tulis ke port //lakukan penundaan sesaat //ROR dalam bahasa C Silahkan Anda cermati perbedaan penulisan menggunakan Assembly dan Native C (gcc), untuk urusan penundaah digunakan fungsi _delay_ms() yang sudah didefinisikan di berkas “delay.h” dan berlaku untuk frekuensi operasional 1MHz. Sedangkan inisialisasi PORT sama seperti pada Assembly. Yang mungkin Anda pertanyakan adalah pengganti perintah ROR yaitu menggunakan instruksi “temp=(temp<<7)|(temp>>1);“, untuk ROL tinggal Anda ganti dengan “temp=(temp<<1)|(temp>>7);” dan “unsigned char temp=0×80;” menjadi “unsigned char temp=0×01;“. Demikian penjelasan singkat saya tentang aplikasi animasi LED berjalan menggunakan bahasa assembly dan C untuk mikrokontroler AVR ATMega32. Semoga bermanfaat dan sukses selalu untuk Anda! Bonus-6: Aplikasi Pushbutton Mikrokontroler ATMega32 dengan Assembly Jika pada kesempatan sebelumnya saya bahas tentang animasi LED menggunakan ASsembly dan C, maka kali ini kita akan belajar tentang konsep masukan menggunakan pushbutton, dalam dunia aplikasi, masukan digital ini bisa berasal dari berbagai macam sensor. Rangkaian yang kita gunakan mirip dengan animasi LED, hanya saja sekarang kita tambahkan 2 buah pushbutton yang dihubungkan ke PORTD.0 dan PORTD.1, perhatikan Gambar 1. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 78 Gambar 6.1 Selanjutnya kita buat programnya dengan diagram alir yang ditunjukkan pada Gambar 6.2. Gambar 6.2 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 79 Program selengkapnya sebagai berikut: ;======================================================================= ;program aplikasi pushbutton dan animasi LED ;http://agfi.staff.ugm.ac.id ;======================================================================= .nolist .include "m32def.inc" .list ;-----------inisialisasi konstanta dan register-------------------------------.equ led=0b10000000 ;variabel LED sebagai data .def temp=r16 .def delay1=r17 .def delay2=r18 .def delay3=r19 ;--- deklarasi segmen untuk kode/program ----------.cseg .org 0000 ;awal kode program pada alama 0x0000 ; menyiapkan alamat SP - Stack Pointer ---------------; harus dituliskan sebagai inisialisasi SP pada RCALL ldi temp,low(ramend) out spl,temp ldi temp,high(ramend) out sph,temp ;-----------inisialisasi port---------------------------------------------ldi temp,0b11111111 ;inisialisasi untuk pin di out ddrb,temp ;PORTB sebagai luaran semua clr temp ;inisialisasi untuk pin di out ddrd,temp ;PORTD sebagai masukan semua ser temp ;inisialisasi untuk pin di out portd,temp ;PORTD agar aktif semua internal pullup-nya ldi temp,led ;persiapan data untuk animasi LED kanan: out sbis rjmp rcall ror rjmp portb,temp pind,0 kiri tunda temp kanan ;keluarkan melalui PORTB ;cek apakah pind,0 HIGH ;YA! lompat ke label kiri ;TIDAK! ;putar satu bit ke kanan ;lagi! out sbis rjmp rcall rol portb,temp pind,1 kanan tunda temp ;keluarkan melalui OPRTB ;cek apakah pind,1 HIGH ;YA! lompat ke label kanan ;TIDAK! ;putar satu bit ke kiri kiri: Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 80 rjmp kiri ;lagi! ; ============================= ; delay loop generator ; 2000000 cycles: ; ----------------------------; delaying 1999998 cycles: tunda: ldi R17, $12 WGLOOP0: ldi R18, $BC WGLOOP1: ldi R19, $C4 WGLOOP2: dec R19 brne WGLOOP2 dec R18 brne WGLOOP1 dec R17 brne WGLOOP0 ; ----------------------------; delaying 2 cycles: nop nop ret ; ============================= .exit ;akhir program Penjelasan: Untuk penjelasan tentang inisialisasi stack dan rutin tundaan silahkan lihat artikel bonus-5; Perhatikan blok inisialisasi PORT, untuk menentukan apakah suatu PORT digunakan sebagai luaran atau masukan digunakan register DDRx, dengan x diisi A, B, C atau D menyesuaikan dengan penggunaan port yang digunakan. Dalam kasus ini digunakan DDRB dan DDRD, masing-masing untuk PORTB danPORTD. Logika ‘1 untuk luaran, logika ‘0 untuk masukan. Sekali lagi penulisan ke DDRx tidak bisa dilakukan langsung, artinya Anda tidak bisa memberikan instruksi, misalnya, ‘out ddrd,0b00000000 yang mengakibatkan adanya kesalahan saat kompilasi. Gak percaya? Ya silahkan dicoba sendiri… Selanjutnya label ‘KANAN‘ dan ‘KIRI‘ digunakan untuk melakukan animasi LED sesuai dengan pushbutton yang ditekan. Pada label KANAN, diawali dengan mengeluarkan data TEMP ke PORTB, kemudian diikuti dengan instruksi SBISyang merupakan instruksi “Skip if Bit in I/O Register is Set“, artinya abaikan instruksi berikutnya jika bit yang diperiksa bernilai HIGH atau berlogika ‘1 . Karena yang diperiksa adalah PORTD.0, dan konfigurasinya adalah aktif rendah (ditekan berarti HIGH), sehingga jika tidak ditekan (dalam kondisi 1 atau SET), maka instruksi RJMP KIRI akan diabaikan, dan program melanjutkan ke penundaan sesaat (RCALL TUNDA), melakukan rotasi bit ke kanan pada TEMP (ROR TEMP) dan mengulang lagi (RJMP KANAN). Hal di atas berlaku juga untuk label KIRI, demikian seterusnya. Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 81 INFORMASI TENTANG PELATIHAN MIKROKONTROLER Hanya dengan minimal 5 JAM32 (karena langsung dibimbing oleh Pakarnya) Anda bisa memahami konsep dasar dan membuat aplikasi mikrokontroler AVR! Ditambah dengan konsultasi GRATIS Anda bisa meningkatkan kemampuan Anda dalam mikrokontroler AVR! Anda juga bisa menghasilkan INCOME TAK TERBATAS! Dengan memanfaatkan kemampuan Anda di bidang mikrokontroler! Pelatihan yang saya selenggarakan memberikan konsep dasar dan tip/trik pembuatan aplikasi mikrokontroler AVR! Informasi & pendaftaran silahkan akses ke http://klikdisini.com/pelatihanavr INFORMASI PERANGKAT KERAS UNTUK BELAJAR MIKROKONTROLER AVR Anda mengalami kesulitan dalam belajar Mikrokontroler AVR?? Bingung memilih/menentukan hardware yang bisa dipakai dengan mudah untuk belajar Mikrokontroler AVR? Pengin yang simpel, murah dan komplit untuk belajar Mikrokontroler AVR? Kekhawatiran Anda akan berakhir! Kesulitan Anda akan segera teratasi Apa yang Anda cari akan segera ditemukan! Dapatkan PENAWARAN ISTIMEWA selama promosi! Dapatkan informasi selengkapnya di http://klikdisini.com/jualavrbasic Pak Agfi, salut buat jiwa “technopreneur” yang kuat dan inovatif. Saya bisa lihat di tulisan tulisan Bapak. Btw, saya sendiri juga sedang belajar untuk mengembangkan bidang otomasi, esp. PLC dan SCADA Handy (http://learnautomation.wordpress.com/) btw,,saya sudah mempunyai buku mikon mas dah lama bgt,, thanx atas bukunya mas,,saya jadi bisa memahami mikon,,saya juga sudah bisa membuat alat yg berbasis mikon,,khususnya at89sxx Ruby 32 Waktu minimal pelatihan, Anda juga bisa menambah jumlah jam jika masih merasa kurang – tingkat lanjut! Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 82 Belajar Mikrokontroler AT89C51/52/55: Teori dan Aplikasi, Edisi 2 Buku ini ditujukan bagi mereka yang ingin memanfaatkan mikrokontroler tipe CISC yaitu AT89C51/52/55 (seri AT89 dari Atmel, Inc.) dalam aplikasi pengontrolan elektronik. Selain itu juga dalam rangka memperkaya pustaka nasional dalam bidang elektronika maupun sistem elektronika. Buku yang terdiri dari 7 bagian ini mengupas tuntas AT89C (sudah obsolette diganti dengan seri AT89S) atau AT89S mulai dari awal tentang arsitektur dasar keluarga AT89 atau seri MCS-51, set instruksi (termasuk cara pengeditan program hingga siap untuk disimpan ke dalam Flash PEROM AT89C), kanal paralel (termasuk karakteristik dari masing-masing port dan aplikasinya), karakteristik timer dan counter, kanal serial dan penanganan sistem interupsi. Program mikrokontroler disimpan ke dalam Flash PEROM-nya AT89, sekaligus bisa juga dihapus, keunggulan ini dapat dimanfaatkan sebagai sarana belajar mikrokontroler, karena tidak memerlukan memori program luar seperti EPROM maupun EEPROM, yang membutuhkan peralatan pengisian dan penghapusan yang merepotkan. Sehingga pada bagian terakhir dibahas secara singkat pembuatan alat untuk mengisi (sekaligus menghapus) program dari mikrokontroler AT89 menggunakan Pemrogram Easy Downloader 2.2, selain itu buku ini dilengkapi dengan CDROM yang berisi dokumentasi lengkap Pemrogram Easy Downloader 2.2 dan program pendukung untuk kompilasi dan informasi lainnya. Anda bisa mendownload daftar isi33 dan/atau contoh bab34 yang ada di buku ini… monggo… Untuk pemesanan secara online: http://www.gavamedia.net/products-page/microcontroller-robotika-dan-plc/belajar-mikrokontrolerat-89c515255-teori-dan-aplikasi-edisi-2/ 33 34 http://www.esnips.com/doc/e2fdc2b1-84e6-4a54-a7dd-6b311894e1a4/isi_mcs51 http://www.esnips.com/doc/cef364e2-6759-462f-9303-4b99c62f7db0/mcs51_03 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 83 PLC: Konsep, Pemrograman dan Aplikasi Omron Sysmac dan ZEN PLC atau Programmable Logic Controller adalah alat kontrol terprogram yang sudah banyak dijumpai dan dipakai dalam industri-industri untuk pengontrolan prosesproses produksi, buku ini ditujukan kepada siapa saja yang ingin belajar PLC, khususnya Omron Sysmac dan ZEN Programmable Relay. Buku ini tersusun dalam 7 Bab, Bab 1 membahas dasardasar atau konsep dasar PLC (Programmable Logic Controller) mulai dari sejarah, konsep dasar PLC hingga jalur-jalur keluaran dan masukan PLC secara umum. Pada Bab 2 dibahas tentang PLC Omron seri Sysmac atau yang dikenal dengan tipe CPM1A/CPM2A mulai dari konsep jalur keluaran dan masukan hingga struktur memori di dalam PLC tersebut. Pada Bab 3 dibahas tentang ZEN Programmable Relay secara garis besar, fitur-fitur yang dimiliki, area memori hingga catatan khusus untuk pengguna PLC Omron Sysmac jika ingin menggunakan ZEN Programmable Relay. Kemudian di Bab 4 dijelaskan konsep-konsep pemrograman diagram tangga ditinjau dari PLC Omron Sysmac. Pada Bab 5 dijelaskan tentang perangkat lunak yang digunakan dalampemrograman PLC, baik Syswin v3.4, ZEN Support Software v3.0 (serta simulatornya) dan PLC Simulator v1.0 karya Tang Tung Yan yang bisa digunakan untuk belajar pemrograman diagram tangga tanpa harus memiliki PLC Sysmac yang harganya mahal. Aplikasi untuk masing-masing PLC, Sysmac dan ZEN Programmable Relay dibahas pada Bab 6 dan Bab 7. Khusus untuk PLC Sysmac, saya membagi dua macam aplikasi, yaitu dasar dan lanjut, sedangkan pada ZEN dikelompokkan berdasar fungsi-fungsi yang ada pada ZEN tersebut. Anda bisa mendownload daftar isi35 dan/atau contoh bab36 yang ada di buku ini… monggo… Untuk pemesanan secara online: http://www.gavamedia.net/products-page/microcontroller-robotika-dan-plc/plc-konseppemrograman-dan-aplikasi/ 35 36 http://www.esnips.com/doc/c7a08a88-3662-4f33-b6d9-7f44d81f572f/isi_plc http://www.esnips.com/doc/d2484bf8-0d3d-4234-a2e3-dab82aafa8e7/plc06 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 84 Penapis Aktif Eltronika: Teori dan Praktek Buku ini ditujukan bagi para hobist maupun mahasiswa D3 dan S1 jurusan atau program studi Elektronika atau Elektronika dan Instrumentasi agar dapat digunakan untuk membantu mengetahui sekaligus memahami tentang seluk-beluk Penapis Aktif Elektronika secara teori dan praktek. Cakupan buku (terdiri atas 8 bab) ini meliputi antara lain: Dasar-dasar penggunaan penguat operasional sebagai dasar rangkaian penapis aktif Dasar-dasar penapis (low-pass, high-pass, bandpass dan notch) Penapis aktif lolos-rendah dan tinggi Order Pertama Penapis VCVS Order Kedua Penapis Ragam-umpanbalik Order Kedua Penapis-penapis Order Tinggi Penapis aktif Notch dan Lolos-pita Penapis Peubah-kondisi (state variable). Anda bisa mendownload daftar isi37 dan/atau contoh bab38 serta bonus39 yang ada di buku ini… monggo… Untuk pemesanan secara online: http://www.gavamedia.net/products-page/komputer-dan-teknologi-informasi/penapis-aktifelektronika-teori-dan-praktek/ 37 http://www.esnips.com/doc/d5dd6e60-4940-4d7b-b58d-dec153ba4ca7/isi_tap http://www.esnips.com/doc/ddd17fc3-cc8f-4eff-b131-b838d9003e7f/tapis04 39 http://www.esnips.com/doc/4808c7b5-55f0-4838-a6e7-f0b3551b9c02/filters 38 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 85 Belajar Bahasa Assembly dengan Emu8086 Segala sesuatu untuk mempelajari Bahasa Assembly dapat Anda peroleh menggunakan perangkat lunak Emu8086 (Emu8086, Inc), yang digunakan dalam buku ini adalah versi 2.58. Bab 1 Membicarakan tentang pengertian sistem bilangan dalam dunia komputer terutama dalam pemrograman Bahasa Assembly, termasuk operasi aritmetika yang terkait. Bab 2 membicarakan tentang perkembangan prosesor atau CPU pengertian Bahasa Assembly termasuk penggunaan secara umum Emu8086, Emulator dan Drive semu (virtual drive). Bab 3 menjelaskan cara-cara pengaksesan memori dalam pemrograman Bahasa Assembly termasuk pengertian memori stack dan wataknya, dilengkapi dengan contoh-contoh program. Juga diberikan penjelasan tentang variabel dalam permograman Bahasa Assembly serta cara-cara penggunaannya. Termasuk dalam bab ini dibahas tentang larik (array), pengalamatan variabel dan konstanta serta tentang stack. Pada Bab 4 dibicarakan secara singkat instruksi-instruksi pada prosesor 80×86 yang meliputi instruksi untuk transfer data, aritmetika, manipulasi bit, transfer kontrol, string, interupsi dan kontrol prosesor. Bab 5 diulas berbagai macam interupsi Prosesor 8086 dan cara penggunaannya. Bab 6 dibahas tentang cara membuat dan menggunakan prosedur dan makro dibicarakan pada bab ini. Selain itu program Emu8086 dilengkapi fungsi-fungsi siap pakai yang memudahkan dalam pembuatan program Bahasa Assembly. Sedangkan pada Bab 7, jika Anda suka dengan elektronika, maka dijelaskan bahwa dengan Bahasa Assembly-pun Anda bisa melakukan pengamatan dan pengendalian perangkat keras di luar komputer (yang biasa juga dikenal sebagai Teknik Antarmuka PC), tentunya bisa disimulasikan dengan piranti semu (virtual devices) yang telah disediakan oleh Emu8086. Program EMU8086 bisa diunduh disini40 sedangkan listing program dalam buku bisa diunduh disini41. Anda bisa mendownload daftar isi42 dan/atau contoh bab43 yang ada di buku ini… monggo… Untuk pemesanan secara online: http://www.gavamedia.net/products-page/komputer-dan-teknologi-informasi/belajar-bahasaassembly-dengan-emu-8086/ 40 http://www.4shared.com/network/search.jsp?searchmode=2&searchName=emu8086 http://www.esnips.com/doc/72832fb6-3e0f-485a-a403-720c02e34c06/program 42 http://agfi.staff.ugm.ac.id/pdf/daftar_isi_asm.pdf 43 http://agfi.staff.ugm.ac.id/pdf/sampel_asm03.pdf 41 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 86 Pengendalian Mobile Robot (MOBOT) dengan MOBOTSIM v1.0 Buku ini menjelaskan teknik-teknik pengendalian robot mobile atau mobot menggunakan bantuan perangkat lunak simulasi mobot MOBOTSIM v1.0 dari mobotsoft. Buku ini cocok untuk siapa saja yang akan menekuni teknik pengendalian robotika dasar terutama mobot atau Mobile Robot, sedangkan perangkat lunak MOBOTSIM bisa digunakan untuk belajar teknik pengendalian sekaligus melakukan berbagai eksperimen pengendalian mobot, seperti penghindaran rintangan (obstacle avoidance), penerapan kecerdasan buatan dan lain sebagainya. Buku ini tersusun atas 5 Bab. Pada Bab 1 diberikan penjelasan tentang perangkat lunak MOBOTSIM v1.0, kemudian dilanjutkan pada Bab 2 dibahas tentang teknik pengendalian mobot dasar tanpa menggunakan sensor, sedangkan pada Bab 3 dan 4 masing-masing dibahas bagaimana cara mengendalikan mobot dengan bantuan sensor posisi dan sensor jarak (dalam dunia nyata biasanya berupa sensor ultrasonik atau sejenisnya). Akhirnya pada Bab 5 dijelaskan teknik penghindaran rintangan dengan metode VFF dan VFH yang dikembangkan sejak tahun 1989 oleh Borenstein dan kawan-kawan dari Michigan University. Buku ini juga dilengkapi dengan CDROM yang isinya perangkat lunak MOBOTSIM v1.0 edisi evaluasi serta berbagai macam informasi yang berkaitan dengan robotika terutama mobot atau Mobile Robot serta bonus-bonus lainnya khusus untuk para pembaca. Anda bisa mendownload daftar isi44 dan/atau contoh bab45 yang ada di buku ini… monggo… Untuk pemesanan secara online: http://www.gavamedia.net/products-page/microcontroller-robotika-dan-plc/pengendalian-mobilerobot-mobot-dengan-mobotsim-v1-0/ 44 45 http://www.esnips.com/doc/cec2661a-0c49-4e83-8bb5-f1840871a0a5/isi_mobot http://www.esnips.com/doc/ebb66bc3-823e-4606-b124-3b4157b63185/mobot02 Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 87 Pasti Ada Hikmahnya...! Subhanallah... dilihat dari covernya begitu sederhana namun ketika membuka halaman buku ini trnyata "WAH..!!!" saya menemukan sesuatu yang amat sangat istimewa.. buku ini dapat mengubah mindset seseorang, dari yang berpikir tidak memiliki harapan menjadi memiliki smngt yang besar tuk menjalani kehidupan ini, dengan rasa syukur dan sabar. Dan seseorang yang beruntung adalah dia yang dapat mengambil Hikmah dari setiap kejadian. Wallahu'alam – M.F. Hadikusuma pengalaman hidup yang LUAR BIASA!!!!!!!!!!! membuka mata n hati, karena dari sebuah pengalaman yg sangat kecill bisa menjadi pelajaran hdup bagi smua umat. mengingatkan saya,yang tiap harinya hanya berdoa n meminta, dan lalai untuk mensyukuri anugerahNYA ... salut ma pak agfi,bisa berbagi pengalaman hidup sambil dakwah melalui media yang ringan tpi sangat mengenaaaa.. sukses selalu pak,.. – Eni Cute Model penulisan per kasus yang simpel, tidak berteletele, langsung ke inti dari buku ini membuat yang membaca tidak cepat bosan. Hal lain yang menarik adalah isi yang ditulis juga dialami oleh Pak Agfi, jadi ketika membaca, saya merasa akrab, mungkin karena memang isinya dapat terjadi sehari-hari (tidak mengadaada), lebih terasa sebagai share pengalaman sendiri sehingga terasa menyampaikan dengan hati dan mengena. Saya merasa tidak digurui, tapi saya merasa diingatkan, terima kasih Pak. – Sri Supadmi Buku ini COCOK untuk Anda maupun HADIAH dari untuk keluarga maupun sahabatsahabat dekat Anda Buku ini mengungkap renungan-renungan perjalanan hidup seorang dosen Elektronika & Instrumentasi (ELINS), AGFIANTO EKO PUTRA, yang banyak di-share kepada kolega maupun mahasiswa2-nya, sehingga banyak di antara mereka mulai memandang kehidupan ini menjadi lebih optimis dan bersemangat, serta memiliki tujuan-tujuan yang mulia, Insya Allah Anda-pun juga bisa mengalaminya... Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 88 Dalam buku ini, Anda akan... Mengetahui apa dan bagaimana menangani Virus Kebiasaan Menemukan jawaban Mengapa Hasil Seminar Motivasi tidak bertahan lama... Mengetahui bahaya dari sikap "ntar dulu ach..." Menyadari bahwa Kegagalan adalah... Bagaimana sebuah Laptop yang error bisa memberikan pelajaran bagi pemiliknya... Mewaspadai pikiran-pikiran kotor... Bagaimana dompet yang (nyaris) hilang juga bisa memberikan pelajaran atau hikmah... Mengenal secara sekilas kekuatan D.U.I.T - Doa, Usaha, Ikhlas dan Tawakal... Mengetahui rahasia besar dalam film Kun Fayakun... dan masih banyak lagi lainnya... Total lebih dari 40 kisah/artikel ditambah dengan 10 artikel BONUS! Unduh ebooknya di http://klikdisini.com/pah Pemesanan langsung secara ONLINE di http://klikdisini.com/jual_pah Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 89 Tip dan Trik Mikrokontroler AT89 dan AVR: Tingkat Pemula hingga Lanjut Buku ini merupakan kumpulan berbagai macam catatan atau artikel selama penulis melakukan berbagai macam penelitian dan eksperimen hingga tahun 2009. Banyak hal yang penulis dapatkan selama itu, terutama ilmu dan pengembangan aplikasi atau terapan mikrokontroler keluarga Atmel AT89 dan Atmel AVR. Semoga para pembaca juga mendapatkan hal yang sama serta bisa ikut serta dalam menyumbangkan acuan dalam bidang mikrokontroler AT89 dan AVR. Juga saya tambahkan sebuah artikel bagaimana cara mendapatkan penghasilan dengan menguasai teknologi mikrokontroler, sehingga diharapkan bisa menjadi ilmu bermanfaat bagi calon-calon Technopreneur di Indonesia, amin! saya tersugesti, klo baca bukunya pak agfi, saya baru bisa paham… padahal saya juga uda punya buku mikro yg lain, spt nya gak enak, klo gak baca punya pak agfi, aneh memang… Teguh Budiman Waduh, emang sip banget penjelasannya pak Agfi, salah satu yang saya kagumi dari pak Agfi adalah kalo pak Agfi njelasin sesuatu pasti dengan ringkas, padat, berisi, to the point dan mudah di mengerti.. saya juga senang baca buku-bukunya pak Agfi lho, nah.. itu adalah tandatanda dari dosen, entrepreneur dan sekaligus penulis yang profesional..| salut dah buat pak Agfi.. Seandainya sebagian besar dosen bisa aktif seperti pak Agfi, pasti Indonesia makin maju neh.. Herlambang (http://indomicron.co.cc/) Pak Agfi, salut buat jiwa “technopreneur” yang kuat dan inovatif. Saya bisa lihat di tulisan tulisan Bapak. Btw, saya sendiri juga sedang belajar untuk mengembangkan bidang otomasi, esp. PLC dan SCADA Handy (http://learnautomation.wordpress.com/) Pesan secara ONLINE di http://www.gavamedia.net/products-page/buku-baru/tip-dan-trikmikrokontroler-at89-dan-avr/ Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 90 Untuk Kerjasama Seminar/Proyek/Coaching silahkan hubungi 08886931260 atau email ke [email protected] Seminar Teknologi Embedded Electronics (mikrokontroler, fpga, plc) Seminar/Talkshow Pasti Ada Hikmahnya & Transformasi Diri Otomasi Sistem, Coaching Tugas Akhir (S1, S2, S3) Copyright (c) 2010 by Agfianto Eko Putra and Dhani Nugraha - 91