Jurnal Teknika
ISSN : 2085 - 0859
Fakultas Teknik Universitas Islam Lamongan
Volume 2 No.2 Tahun 2010
PENGATURAN FREKUENSI BEBAN HIBRID TURBIN ANGIN DIESEL
DENGAN MENGGUNAKAN ALGORITMA GENETIKA
Zainal Abidin 1
1)
Dosen dpk pada Fakultas Teknik Prodi Elektro Universitas Islam Lamongan
Abstrak
Sistem hibrid adalah jaringan terkontrol dari beberapa pembangkit tenaga energi terbaharukan
seperti : turbin angin, sel surya, mikrohidro dan sebagainya. Kenyataan di lapangan bahwa terjadi
perbedaan fluktuasi frekuensi yang mempengaruhi kualitas daya sistem.
Ada beberapa permasalahan yang dapat meningkatkan osilasi frekuensi rendah. Di antaranya :
(a) Tingginya setting gain dan kecilnya waktu konstan pada Automatic Voltage Regulator, (b) Terlalu
banyak jaringan transmisi yang panjang sehingga kemampuan lemah (weak line). Dalam penelitian ini
diterapkan desain kontrol dengan Algoritma Genetika dengan mencari nilai optimum Proporsional
Intergral (PI) untuk mengatur frekuensi beban dengan program Matlab/ Simulink. Selanjutnya
mengubah fungsi transfer dari diagram turbin angin dan diesel ke dalam bentuk matrik dan
diaplikasikan dalam M-File algoritma genetika untuk mendapatkan nilai kontrol dengan melakukan
tuning rasio redam (damping ratio) dan real part untuk mendapatkan ovreshoot dan rise time yang
optimal. Semakin minimum real part, semakin cepat respon sistem. namun jika diminimumkan terus
akan mengurangi rasio redam sehingga memperbesar overshoot.
Nilai kontrol dengan metode algoritma genetika dapat melakukan tuning optimisasi dengan
pembangkitan hingga 100 generasi sebanyak 4 tahap. Respon sistem dengan Simulink/ Matlab dengan
membandingkan dengan sistem tak terkontrol menunjukkan bahwa overshoot dan respon keadaan
mantap pada sistem terkontrol algoritma genetika lebih cepat.
Kata Kunci : algoritma genetika, pengaturan frekuensi beban
1. Pengantar
Dewasa ini dunia dituntut untuk mengembangkan
sumber-sumber energi baru terbarukan yang dapat
menggantikan fungsi bahan bakar sebagai sumber
energi. Hal ini membuka riset di berbagai negara
dalam rangka pengembangan energi terbarukan.
Dalam tema kali ini peneliti mengambil
permasalahan tentang sistem hibrid. Sistem hibrid
adalah suatu jaringan yang terkontrol dari beberapa
sumber energi terbarukan seperti turbin angin,
photovoltaic, mikrohidro, dan sebagainya. Akan
tetapi dalam prakteknya karena adanya perbedaan
pengaturan fluktuasi frekwensi maka hal ini akan
berpengaruh terhadap kualitas suplai tenaga yang
ada pada sistem hibrid.
Pada penelitian sebelumnya studi kestabilan
operasi sistem hibrid membahas teknik pengaturan
frekwensi serta mendiskusikan teknik gabungan
sistem fuel cell dan elektrolisa hibrid untuk
meningkatkan kemampuan sistem mikrogrid dalam
peningkatan kualitas daya dari permasalahan
fluktuasi frekwensi. Pengaturan yang diajukan dan
sistem pemantauan (monitoring) yang dilakkan
adalah untuk menjaga kualitas daya, juga untuk
menjaga kestabilan fluktuasi frekwensi yang
disebabkan adanya daya random
pada
pembangkitan serta pada sisi beban juga untuk
menjaga kestabilan fluktuasi aliran daya pada tieline aliran daya yang diakibatkan fluktuasi
frekwensi dari interkoneksi sistem hibrid.
Dari beberapa permasalahan pengaturan frekwensi
yang menyebabkan fluktuasi aliran daya pada
berbagai jenis pembangkitan sistem hibrid yang
terkoneksi, maka peneliti mengambil tema
Pengaturan Frekwensi Pada Sistem Daya Hibrid
dengan Algoritma Genetika dengan mengkaji
sistem pembangkit diesel dan turbin angin.
2. Tinjauan Pustaka
2.1. Sistem Hibrid
Sistem daya hibrid diesel-turbin angin
stand alone mungkin secara ekonomis dapat
diterapkan dalam beberapa kasus penyediaan
energi listrik pada daerah terpencil misalnya
wilayah pegunungan atau kepulauan dimana
tingkat kecepatan angin cukup signifikan untuk
menggerakkan generator dalam memproduksi
7
Jurnal Teknika
ISSN : 2085 - 0859
Fakultas Teknik Universitas Islam Lamongan
Volume 2 No.2 Tahun 201
listrik tetapi untuk penyediaan energi pada sistem
jaringan terkoneksi tidak ekonomis [2].
Diharapkan hasil pembangkitan energi
listrik dari sistem hibrid Turbin Angin-Diesel
dapat menyediakan pelayanan yang baik bagi
pelayanan beban ke konsumen, namun semua itu
tergantung pada tipe dan karakteristik kontrol
pembangkitan. Hal ini berarti variasi sistem
frekuensi harus dapat dijaga kestabilannya agar
peralatan dapat beroperasi dengan baik dan efisien.
Strategi yang berbeda dapat diterapkan
dengan cara mereduksi perbedaan pembangkitan
dan beban serta mengatur deviasi frekwensi sistem
[5]. Adapun strategi-strategi yang dapat dilakukan
dengan cara pengaturan kontrol beban tiruan [7],
prioritas switching kontrol beban [6], penggunaan
flywheel [1], superkonduktor magnetik [4] dan
sistem penyimpanan energi baterai [5].
Untuk dapat menampilkan analisis
detail studi tentang sistem hibrid turbin angindiesel dan mikrohidro dengan model sinyal
transfer kecil. Pemilihan yang optimal dari
gain kontrol disarankan menggunakan teknik
ISE [8] untuk kasus kontrol kontinyu dan
kontrol diskrit.
Permasalahan yang terjadi pada
pembangkitan adalah terjadinya frekuensi
osilasi yang rendah. Hal ini muncul karena :
a. Tingginya setting gain dan rendahnya
waktu konstan pada Automatic Voltage
Regulator (AVR).
b. Terlalu banyak jaringan transmisi yang
panjang sehingga kemampuan lemah
(weak line).
Untuk
mengatasi
permasalahan
tingginya gain pada AVR, sebelumnya kita
membahas singkat fungsi transfer dari AVR
agar lebih mudah memahami pengaruh gain
dan waktu konstan AVR. Struktur AVR sering
direpresentasikan sebagai fungsi transfer orde
1 seperti gambar 1 berikut :
Vt
KA
1 + T AS
Efd
Gambar 1. Automatic Voltage
Regulator
tersebut. Pada dasarnya gain yang tinggi pada
AVR memiliki maksud :
a. Semakin tinggi gain, tegangan terminal
generator akan terkontrol dengan baik, karena
tujuan AVR memang membuat tegangan
terminal stabil.
b. Semakin tingginya gain pada AVR, ternyata
juga menimbulkan efek samping yaitu semakin
lemahnya
kemampuan
redam
(negatif
damping) dari generator sehingga berpotensi
timbulnya osilasi frekuensi rendah.
c. Dari kedua alasan di atas, dapat disimpulkan
bahwa pengaturan gain pada AVR adalah
sesuatu yang sangat penting, karena kalau
terlalu
rendah
akan
menimbulkan
ketidakstabilan monotik dan jika terlalu tinggi
akan menimbulkan osilasi frekuensi rendah.
Dalam permasalahan yang peneliti angkat
kali ini adalah mendesain kontrol dengan metode
algoritma genetika untuk mencari nilai fitnes
terbaik dari proporsional integral (PI) pengaturan
frekwensi beban dengan Matlab/Simulink dengan
langkah-langkahnya adalah mendesain kontrol
dengan M-File, menentukan state space dari
sistem, kemudian mengaplikasikannya pada
Simulink untuk mendapatkan sampel periode yang
berbeda juga respon transient dari sistem.
a. Model Simulasi
Pmax
Blade picth
Control
Governor
∑
Ptg
r
∑
Wind Energy
Supply
Energy
Conversion
System
Torsional
System
Prime Mover
Power
Fluid
Coupling
2
Pf
Diesel
Unit
Gen
1
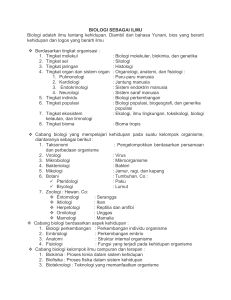
Gambar 2. Model Konsep Diesel dan Turbin
Angin
Model dalam studi kasus ini terdiri dari
sub sistem : model dinamik turbin angin, model
dinamik diesel, kontrol kecepatan sudu turbin
angin dan model dinamik generator .
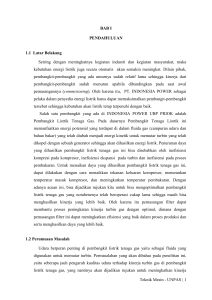
Blok diagram fungsi transfer Turbin Angin-Diesel
:
Dimana Ka= gain, memiliki fungsi sebagai
kendali proporsional dan Ta=waktu konstan, yang
menandakan kecepatan respon dari AVR, semakin
kecil waktu konstan, semakin cepat respon AVR
8
Jurnal Teknika
ISSN : 2085 - 0859
Fakultas Teknik Universitas Islam Lamongan
Volume 2 No.2 Tahun 201
P
X1
U1
X3
X2
H1
1
Kpc
∑
D
H
Turbin Angin
Ptg
controller
Kfc
∑
∑
2
∑
∑
Pload
ref
Pf
Diesel Power
Pf1
Gambar 3. Blok Diagram Fungsi Transfer untuk DieselTurbin Angin dengan Kontrol
adalah variabel tiruan (dummy variabel). Fungsi
c. Model Matematik sistem
Model linier digunakan untuk model turbin transfer dari governor diesel pada gambar 2 di
angin dan diesel digunakan untuk mengidentifikasi berikan :
dan menentukan nilai osilasi tak terkontrol. Pada
Pf(S)
Kd (1 + S )
model konsep seperti pada gambar 2. Aliran
=
kopling pada gambar tersebut dimana ada
.............(3)
S(1 + ST1)
perbedaan transfer kecepatan pada sisi tenaga. ref(S)- 2(S)
Fungsi aktual adalah non linier tetapi untuk model
tersebut dilinierkan, sehingga menghasilkan daya Karena ref adalah setting kecepatan referensi (a
set point secara konstan. Gambar 2.3 konstant) untuk generator diesel, sehingga ref =
memperlihatkan blok diagram fungsi yang 0.0 . Dengan mensubstitusikan ref =0.0 ke
ditentukan.
persamaan 3 di atas didapatkan :
Fungsi transfer dari aktuator hidrolik terpasang
dapat ditulis :
Pf(S)
Kd (1 + S )
................(4)
=
H(s)
Kp2(1 + STp1)
- 2(S)
S(1 + ST1)
=
............(1)
U1(s)
(TkS2) + STp2 +1) (1+S)
Fungsi transfer dari governor diesel pada
Tetapi Tk sangat kecil dibandingkan Tp2 sehingga persamaan di atas dipecah menjadi dua blok sistem
Tk diabaikan . Kemudian persamaan tersebut dan Pf1 adalah variabel tiruan.
ditulis sebagai :
d. Metode Optimasi Algoritma Genetika
H(s)
Kp2(1 + STp1)
..................(2)
Algoritma genetika (AG) adalah suatu
=.
teknik
yang
memiliki kemampuan intelejen.
U1(s)
(1+ STp2) (1+S)
Teknik ini adalah algoritma stokastik yang
memanfaatkan fenomena alam. Gagasan di
Fungsi transfer dari persamaan 2 dari aktuator belakang AG adalah mengerjakan yang dikerjakan
hidrolik terpasang dibagi menjadi dua blok oleh alam.
(gambar 2) dan H1
Secara detail, proses operasi AG untuk
melakukan
perhitungan
optimasi
dapat
9
Jurnal Teknika
ISSN : 2085 - 0859
Fakultas Teknik Universitas Islam Lamongan
Volume 2 No.2 Tahun 201
dipresentasikan melalui penjelasan yang dimulai
dengan mencari harga maksimum dari sebuah
fungsi g, dengan g = -f
Min f(x) = Maks g (x) = Maks {-f(x)}
(5)
Kita mengasumsikan bahwa fungsi
objektif f mengambil harga-harga positif pada
domiannya, dan kita dapat menambah konstanta C
positif.
Maks g(x) = Maks { g (x) + C }
(6)
Kita akan mencari harga maksimum fungsi dari k
variabel , f(x1, …., xk) : Rk R. Masing-masing
variabel x1 dapat mengambil harga dari domain Di
[a1, b1] R dan f (x1………,xk) > 0. Untuk sebuah
x1 Di, kita ingin mengoptimasi fungsi f dengan
ketelitian yang dibutuhkan, yaitu delapan desimal.
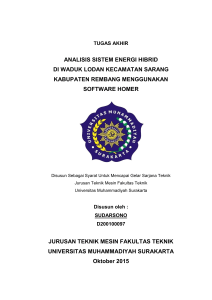
Adapun aliran program algoritma genetika
dapat dilihat pada gambar 5 berikut :
Mulai
Inisialisasi populasi
Generasi =0
Evaluasi nilai fitness
untuk tiap
kromosom
Perform Seleksi,
Crossover dan
Proses Mutasi
Gen=Gen+1
Generasi>max generasi
atau pencapain kontrol
Tidak
optimum
Ya
Selesai
Gambar 4. Diagram Alir Algoritma Genetika
3.Cara Penelitian
3.1. Bahan Penelitian
Bahan-bahan yang dibutuhkan untuk
penelitian adalah:
1. Buku teks yang menunjang
penelitian.
2. Makalah dan jurnal yang
berkaitan.
3. Data-data yang dibutuhkan
3.2. Alat Penelitian
Alat-alat penelitian yang digunakan
dalam penelitian :
1. Software Matlab/Simulink versi 7.0
2. Laptop PIV Intel Atom A-Note
3. Program Aplikasi Microsoft Excel
3.3. Jalannya Penelitian
Metodologi penelitian yang digunakan
adalah dengan mendesain blok sistem turbin
angin dan diesel kemudian diaplikasikan ke
dalam Matlab dan dilakukan uji performa
sistem. Adapun langkah-langkah sebagai
berikut :
a. Merancang blok sistem turbin angin dan
diesel
b. Menghitung state space dari blok transfer
kemudian dibentuk matrik dari variabel
kontrol dan matrik konstan.
c. Memasukkan matrik ke dalam program
matlab Algoritma Genetika dimaksudkan
untuk sebagai kontrol untuk tuning
damping ratio dan real part
untuk
menentukan overshoot dan rise time.
Semakin minimal real part, maka semakin
cepat respon sistem. Namun jika
diminimalkan terus akan mengurangi
damping ratio sehingga memperbesar
overshoot.
Untuk membuktikan respon rasio redam
dan real part maka harus disimulasikan
range rasio redam dan real part , misalnya:
a. Respon sistem jika rasio redam
diset : 0,1 kemudian dilanjutkan
rasio redam 0,2, rasio redam 0,3
sampai dengan 0,7.
b. Respon sistem jika real part
divariasi mulai dari -0.05 , -0.1 dan
seterusnya.
d.
Untuk
menampilkan
performance
stabilitas
sistem
kita
gunakan
Matlab/Simulink.
10
Jurnal Teknika
ISSN : 2085 - 0859
Fakultas Teknik Universitas Islam Lamongan
Volume 2 No.2 Tahun 201
4. Hasil Penelitian dan Pembahasan
a. Menghitung state space diagram sistem
1
(
).U1
1 STp
H1
a.
H1Tp2 U1 H1
H1
1
H1
U1
Tp2
Tp2
1
1
H1
U1
H1
Tp2
Tp2
Kp2 (1 STp1 )
H
H1
(1 S )
H H Kp2 (H1 H1Tp1 )
H Kp2 H1 H1 Kp2Tp1 H
1
)H1 .Kp2Tp1 H
Tp2
1
Kp2 H1 (1
Tp1 ) H
Tp2
Tp
Kp2 (1 1 )H1 H
Tp2
Kp3
D
H
(1 S )
Kp2 H1 (
c.
D D Kp3 H
D Kp3 H D
d.
1
1
( Kpc.D Kfc (1 2 )
2 HS
Kpc
Kfc
Kfc
1
D
1
2
2 H
2 H
2 H
1
.Kfc (1 2 ) + Pf
2 HdS
Kfc
Kfc
2
1
2 + Pf
2 Hd
2 Hd
Kd
f. Pf 1
.2
S
e.
2
Pf1 Kd2
(1 S )
Kd
.(Pf1
2 )
(1 ST1 )
S
H 1 H1TP2 U1
Pf
Pf PfT1 Pf1
b
g.
Kd
2 Pf1 Kd 2
S
PfT1 Pf1 Kd 2 Pf1 Kd 2 Pf
1
Kd
1
Pf Pf1
2 Pf
T1
T1
T1
Hasil dari state space blok sistem dimasukkan
ke dalam matrik A
1
Tp2
Kp Kp 2Tp1
2
Tp2
0
A
0
0
0
0
0
0
0
0
0
1
0
0
0
0
Kp3
1
Kpc
2 H
0
Kfc
2 H
Kfc
2 Hd
Kd
Kd
T1
0
0
0
0
0
0
Kfc
2 H
Kfc
2 Hd
0
0
0
0
0
0
0
0
1
T1
0
0
0
0
1
0
1
T1
Sementara matrik B karena terdiri dari matrik
7x 1 yang terdiri dari satu kontrol input, yakni
:
1
Tp
2
Kp 2Tp1
Tp 2
0
B
0
0
0
0
Sementara adalah matrik konstan pada sisi
gangguan (disturbance) adalah :
0
0
0
1
2H
0
0
0
0
0
1
2H d
0
0
0
0
Kemudian matrik A, B, dan diaplikasikan ke
dalam program Matlab untuk mencari fitnes
terbaik dengan algoritma genetika.
Adapun variabel mesin-mesin sebagai kajian
studi simulasi ini sebagai berikut :
PR (Daya ) = 350 kW
11
Jurnal Teknika
ISSN : 2085 - 0859
Fakultas Teknik Universitas Islam Lamongan
Volume 2 No.2 Tahun 201
sistem
ke
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
10
20
30
40
50
generasi
60
70
80
90
100
Gambar 7. Kurva fungsi obyektif pada 200
generasi
Error Value
1.4
dalam
1.2
1
In1
In2
wind
Sine Wave3
VSC
To Workspace1
0
Sine Wave1
fungsi obyektif
b. Mendesain blok
Matlab/Simulink
Error Value
0.8
fungsi obyektif
H
= dasar konstanta inersia mesin
turbin angin 3.5 s
Hd
= dasar konstanta inersia mesin
diesel = 8.5 s
Kfc
= 16.2 pu KW/ Hz
Kp2
= 1.25
Kp3
= 1.40
Pload
= 0.01 pu KW
T1
= 0.025 s
Kd
= 16.5 pu KW/Hz
Tp2
= 0.041 s
Tp1
= 0.60 s
Kpc
= 0.80
Tk
= 0.0009 s
0.8
0.6
Kpc1
0.4
Sine Wave2
-CConstant
Clock
In2
0.2
0
time
In1
To Workspace2
Pmax2
Kpc4
GA
0
Load
Band-Limited
White Noise
0
Kpc2
Band-Limited
White Noise1
In1
In2
0
10
20
30
To Workspace
40
50
generasi
60
70
80
90
100
Gambar 8. Kurva fungsi obyektif pada 300
generasi
-CConstant1
4a1
Error Value
1
In1
Pmax1
In2
0.14
Kpc3
4b1
0.12
Melakukan simulasi dengan Matlab
/Simulink
Dengan algoritma genetika sebanyak 100
generasi yang dilakukan dalam empat tahap
dapat ditampilkan secara grafis dan tabel
sebagai berikut :
Error Value
0.8
0.7
0.6
fungsi obyektif
c.
0.5
0.4
0.3
0.2
0.1
0
0
10
20
30
40
50
generasi
60
70
80
90
100
Gambar 6. Kurva fungsi obyektif pada 100
generasi
0.1
fungsi obyektif
Gambar 5. Blok sistem dalam
Matlab/Simulink
0.08
0.06
0.04
0.02
0
0
10
20
30
40
50
generasi
60
70
80
90
100
Gambar 9. Kurva fungsi obyektif pada 400
generasi
Dari gambar 6, 7,8 dan 9 adalah hasil
optimasi AG untuk fungsi obyektif sekaligus
mendapatkan nilai Kp dan Ki yang selanjutnya
dilakukan variasi rasio redam dan real part untuk
mendapatkan nilai optimal kontrol AG.
Tabel 4.1. Pencapaian Optimum Kp dan Ki
pada 400 generasi
Generasi
Kp
Ki
80
2.12
12.41
160
3.48
15.31
240
3.59
15.59
375
2.94
12.54
12
Jurnal Teknika
ISSN : 2085 - 0859
Fakultas Teknik Universitas Islam Lamongan
Volume 2 No.2 Tahun 201
Tabel 3. Mengubah parameter Kfc, Kd, dan Kpc
20 %
Variabel
Control
20%(+)
20% (-)
Kfc 16.2
19.44
12.96
Kd 16.5
19.88
13.2
Kpc 0.88
0.96
0.64
Pada variabel kontrol dengan Kfc =16.2, Kd=16,5
dan Kpc=0.8 hasil iterasi GA pada generasi ke-81
secara optimal didapat nilai :
Kp
Ki
4.1773 18.9782
error
-0.0052
dengan gain 0.59.
Plot nilai eigen sebagai berikut :
1.5
Gambar 10. Pencapaian PI pada 400
generasi
1
Respo
n
sistem
Eigen
Rise
time(s
)
Overs
hoot(s
)
Dam
=0.1
Re=
0.05
0.69
75
0.00
23
0.00
25
Perubahan damp.ratio dan real part
Dam Dam Dam Dam Dam
=0.2 =0.3 =0.4 =0.5 =0.6
Re=
Re=
Re=
Re=
Re=
-0.1
-0.2
-0.3
-0.4
-0.5
0.69
39
0.00
25
0.00
25
0.70
17
0.00
27
0.00
24
0.71
10
0.00
29
0.00
23
0.70
65
0.00
293
0.00
22
0.70
85
0.00
295
0.00
22
Dam
=0.7
Re=
-0.6
1.71
5
0.00
297
0.00
22
Dari gambaran tabel 2. didapatkan bahwa
rise time sangat dipengaruhi real part, semakin
minimal real part, respon sistem semakin cepat,
jika rasio redam besar, maka overshoot mengecil.
Melakukan simulasi dengan mengubah nilai
Kfc, Kd dan Kpc pada sistem sebelumnya
sebesar 20 %
0.5
Nilai Eigen
Adapun hasil dari variasi rasio redam dan real part
dapat ditunjukkan table 2 berikut :
Tabel 2
Konfigurasi respon sistem jika rasio
redam dan real part diubah
0
-0.5
-1
-1.5
-4
-3.5
-3
-2.5
-2
-1.5
axis
-1
-0.5
0
0.5
1
Gambar 7 . Plot Nilai Eigen
Dari gambar 7 bahwa sebaran sebagian nilai
eigen berada pada dua kwadran dan berjarak sama
yakni -0.7856i dan 0.7856i . Berdasarkan teori
bahwa kestabilan dari suatu sistem lup tertutup
ditentukan dari letak pole lup tertutup di bidang s
atau nilai eigen dari matriks konstanta A. Jika
terdapat pole lup tertutup yang terletak di sebelah
kanan sumbu imajiner bidang s (berarti bagian real
dari pole bertanda positif), maka dengan
bertambahnya waktu, pole tersebut akan
memberikan pengaruh yang sangat dominan,
sehingga respon sistem dalam waktu tertentu akan
naik turun atau berosilasi dengan amplitudo yang
semakin besar. Sedangkan suatu sistem kontrol
dikatakan stabil bila lup tertutup terletak di sebelah
kiri sumbu imajiner bidang s. Dari gambar 7 dapat
dikatakan bahwa sistem dalam kondisi stabil.
Sedangkan plot deviasi frekuensi dari
yang tidak terkompensasi, terkompensasi
13
Jurnal Teknika
ISSN : 2085 - 0859
Fakultas Teknik Universitas Islam Lamongan
Volume 2 No.2 Tahun 201
dengan AG dapat dilihat pada gambar 8
berikut :
Gambar 11 Deviasi Frekuensi Beban
(perubahan parameter 20%+)
Gambar 8. Deviasi Frekuensi Sistem
Sedangkan respon terhadap wind acak dapat dilihat
pada gambar 9 berikut :
0.025
Dari gambar di atas, terjadi penurunan
overshoot pada sistem GA dengan overshoot
sebesar 0.1 dan waktu keadaan mantap
10s.Sementara untuk perubahan Kf, Kd dan
Kpc pada perubahan 20% (-) didapatkan
gambar 12
0.02
Daya turbin angin
0.015
0.01
0.005
0
-0.005
0
5
10
15
time(s)
20
25
30
Gambar 9. Respon terhadap Wind Acak
Sementara respon terhadap perubahan beban
dapat dilihat pada gambar 10 berikut :
0.025
0.015
Beban
Perubahan Beban
Respon
Perubahan
0.02
0.01
0.005
0
0
5
10
15
time
20
25
30
Gambar 10. Perubahan Beban
Deviasi frekuensi dengan perubahan Kf, Kd dan
Kpc (20% +) dapat dilihat pada gambar 11
sebagai berikut :
Gambar 12. Deviasi Frekensi Beban
(perubahan parameter 20%(-)
Dari gambar 12 menunjukkan bahwa
kompensasi sistem dengan AG dengan
penurunan parameter 20 %(-) terjadi overshoot
pada 0.5 dan keadaan mantap pada waktu 12s.
Dari perubahan nilai parameter Kf, Kd dan Kpc
sebesar 20 % (+) menjadi lebih efektif dari
sistem awal karena dapat menurunkan
overshoot dan mencapai keadaan mantap lebih
cepat.
14
Jurnal Teknika
ISSN : 2085 - 0859
Fakultas Teknik Universitas Islam Lamongan
Volume 2 No.2 Tahun 201
Dengan algoritma genetika pada 100
generasi dengan fungsi obyektif yang
merupakan tuning real part dan rasio redam
seperti tabel 1, maka didapatkan nilai kontrol
yang terkompensasi algoritma genetik menjadi
:
zeta=-0.1,-0.2,-0.3,-0.4,-0.5,-0.6
1.8
-0.1
-0.2
-0.3
-0.4
-0.5
-0.6
1.6
1.4
Damping
c(t)
ratio
1.2
1
0.8
0.6
K(s) = Kp 2
0.4
(1 sTp1 )
(1 sTp2 )(1 s)
0.2
0
0
2
4
6
8
10
=
12
realwn*t
part
(time)
47.05
Gambar 13. Respon sistem variasi real
part terhadap rasio redam
Kontrol yang diajukan menjadi :
Dari gambar blok fungsi transfer
turbin angin diesel pada bagian turbin angin
dan bagian bawah dasar diesel dipasang SMES
(Superconducting Magnetic Energy Storage).
Sistem ini digunakan untuk meredam fluktuasi
frekuensi yang ditimbulkan oleh kecepatan
angin yang tidak konstan. Sebenarnya, kontrol
sudu terpasang (blade pitch control) dapat
digunakan untuk mengurangi fluktuasi
frekuensi tetapi ada kendala karena responnya
yang lambat. Berikut adalah SMES dan
kontrol yang digunakan untuk mengatur
fluktuasi frekuensi. Dalam hal ini kontrol
1
1 sTp2
Kp 2 (1 sTp1)
1 s
SMES
Kontrol
Gambar 14 . SMES dan Kontrol
(Mitani, 1988)
Sehingga dari gambar 4.18 terjadi umpan balik
sebesar :
H
Kp 2(1 sTp1)
U1 (1 sTp2)(1 s)
1.25(1 0.60s)
=
(1 0.041s)(1 s)
Dengan mengambil rata-rata dari Tp1 dan Tp2
dengan 20%, maka didapat nilai Tp1=0.60
dan Tp2= 0.041, sehingga :
Nilai K(s) =
10.76(0.60s 1)
(0.041s 1)
(1 1.642s)
(0.00286s 2 0.1108s 1)
K(s) = 47.05
(1.642s 1)
(0.1108s 1)
Nilai K(s) ini adalah kontrol
frekuensi untuk menentukan kompensasi
deviasi frekuensi.
Hasil dari simulasi kemudian
dibandingkan dengan desain sebelumnya
yakni Variable Structure Control (VSC)
(D.Das, DP.Kothari, 1999)
dengan
karakteristik desain :
UPPC = -KvPw jika Pw >
UPPC=-KpPw – Ki Pw dt
jika Pw ≤
dimana = 0.0004, Kv=-10,
Kp=10, dan Ki=4.
Dalam studi simulasi ini, range
daya -0.01≤uppc≤ 0.01 puKW dengan
basis daya 350 kW yang terpasang pada
output terminal dari kontrol.
5. Penutup
5.1. Kesimpulan
a. Algoritma genetika sebagai kontroller
dapat melakukan optimasi tuning untuk
menguji kontrol sistem dengan generasi
hingga 100 didapatkan nilai tuning
frekuensi kontrol sebesar :
K(s) = 47.05
b.
(1.642s 1)
(0.1108s 1)
Nilai K(s) ini adalah kontrol frekuensi
untuk menentukan kompensasi deviasi
frekuensi.
Dengan melakukan pengujian stabilitas
sistem
dengan
Simulink/Matlab
didapatkan bahwa jika dibandingkan
dengan sistem tak terkontrol, respon
overshoot lebih cepat dari sistem tak
terkompensasi sebesar 0.35 dan keadaan
15
Jurnal Teknika
ISSN : 2085 - 0859
Fakultas Teknik Universitas Islam Lamongan
Volume 2 No.2 Tahun 201
mantap pada 10s, sedangkan pada kontrol
led-lag 20%, pada 20 % (+) sistem terjadi
penurunan overshoot sebesar 0.1 dan
keadaan mantap pada 10s dan pada 20
%(-)terjadi
peningkatan
overshoot
sebesar 0.5 dan keadaan mantap pada
15s. Sebagian nilai eigen yang terbentuk
berada pada titik stabil yakni : 0.7856i
dan – 0.7856i pada penambahan 20% (+)
dan+ 0.7199i dan -0.7199i pada
pengurangan 20%. Hal ini menunjukkan
sistem dalam keadaan stabil.
5.2. Saran
Berdasarkan
hasil
penelitian
dan
pembahasan serta dari kesulitan-kesulitan
yang ditemui selama penelitian, maka
disarankan
untuk
melakukan
dan
mengembangkan metode yang lebih baik.
Daftar Pustaka
Dettmer, R., lEE Review, 149, 1990.
Hunter, R. and Eiloit, G., Wind-Diesel Systems, A
Guide
to
the
Technology
and
its
Implementation. Cambridge University Press,
Cambridge, 1994
Kothari, M. L., Nanda, J., Kothari, D. P. and Das,
D., IEEE Trans. on Power Systems, 1989, 4,
731
Mitani, Y., Tsuji, K. and Murakami, Y., IEEE
Trans., 1988, PAS-3, 141857
Nayar, C. V., Phillips, S. J., James, W. L., Pryor,
T. L. and Returner, D., Solar Energy, 1993, 51,
65
Nacfaire, H., Wind-Diesel and Autonomous Energy
Systems. Elsevier Science, London, 1989
Woodward, Boys J.T. Electrical Control & Drive
Wind. IEE Review. 1980
Tripathy, S. C., Bhatti, T. S., Jha, C. S., Malik, O.
P. and Hope, G. S., IEEE Trans.on PAS, 1984,
A-103,
1045
16