BAB 2 TINJAUAN PUSTAKA 2.1. Harmonisa
advertisement

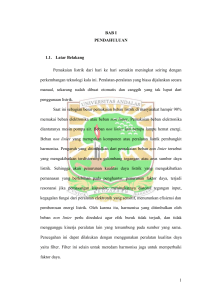
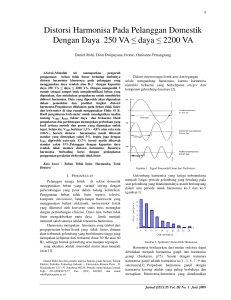
BAB 2 TINJAUAN PUSTAKA 2.1. Harmonisa Dalam sistem tenaga listrik dikenal dua jenis beban yaitu beban linier dan beban tidak linier. Beban linier adalah beban yang memberikan bentuk gelombang keluaran yang linier artinya arus yang mengalir sebanding dengan impedansi dan perubahan tegangan, sehingga gelombangnya bersih dan tidak terdistorsi. Tidak semua beban yang terpasang merupakan beban linier bahkan dewasa ini sebagian besar beban yang terpasang merupakan beban tidak linier. Pada beban tidak linier beban tidak lagi menggambarkan bentuk gelombang arus dan tegangan yang proporsional. Pemakaian beban tidak linier akan menghasilkan bentuk gelombang arus dan tegangan yang tidak sinusoidal. Akibatnya akan terbentuk gelombang terdistorsi yang akan menghasilkan harmonisa. Perbedaan bentuk gelombang yang dihasilkan oleh beban linier dan beban tidak linier dapat dilihat pada Gambar 2.1. (a) Beban linier (b) Beban tidak linier Gambar 2.1. Bentuk gelombang arus dan tegangan [5] Universitas Sumatera Utara Gambar 2.1 memperlihatkan perbedaan bentuk gelombang yang dihasilkan oleh beban linier dan beban tidak linier. Bentuk gelombang yang tidak sinusoidal ini merupakan gabungan dari bentuk gelombang fundamental dan gelombang yang mengandung sejumlah komponen harmonisa. Jadi harmonisa adalah gelombang arus atau tegangan sinusoidal yang frekuensinya merupakan kelipatan bilangan bulat dari frekuensi fundamentalnya. Misalnya bila frekuensi fundamentalnya 50 Hz maka harmonisa ke-2 adalah gelombang sinusoidal dengan frekuensi 100 Hz, harmonisa ke-3 gelombang sinusoidal dengan frekuensi 150 Hz dan seterusnya. 2.2. Sumber-Sumber Harmonisa Dalam sistem tenaga listrik dikenal dua jenis beban yaitu beban linier dan beban tidak linier. Beban linier adalah beban yang memberikan bentuk gelombang keluaran yang linier artinya arus yang mengalir sebanding dengan impedansi dan perubahan tegangan. Sedangkan beban tidak linier adalah bentuk gelombang keluaran yang tidak sebanding dengan tegangan masuk dalam setiap setengah siklus sehingga bentuk gelombang arus maupun tegangan keluarannya tidak sama dengan gelombang masukannya. Saat ini elektronika daya sebagai konverter banyak digunakan pada sistem penyearah atau inverter untuk sistem penyedia energi listrik sesuai kebutuhan [6]. IEEE 519-1992 (standar Internasional harmonisa) mengidentifikasi sumber utama dari harmonisa pada sistem tenaga adalah meliputi konverter daya, busur peleburan, statik Universitas Sumatera Utara VAR kompensator, inverters, kendali fasa elektronika daya, cycloconverters, power supply DC dan PWM. Beban tidak linier umumnya merupakan peralatan elektronik yang di dalamnya banyak terdapat komponen semikonduktor seperti switching power supplies, UPS, komputer, printer, LHE, DC drive, AC drive, welding arc, battery charger, dll. Proses kerja peralatan atau beban tidak linier ini akan menghasilkan gangguan atau distorsi gelombang arus yang tidak sinusoidal. 2.3. Perhitungan Harmonisa Harmonisa diproduksi oleh beberapa beban tidak linier atau alat yang mengakibatkan arus tidak sinusoidal. Untuk menentukan besar Total Harmonic Distortion (THD) dari perumusan analisa deret Fourier untuk tegangan dan arus dalam fungsi waktu yaitu [7]: ∞ 𝑣(𝑡) = 𝑉𝑜 + � 𝑉𝑛 𝑐𝑜𝑠(𝑛𝜔𝑡 + 𝜃𝑛 ) ….…………..…. (2.1) 𝑛=1 Dimana: V o = Komponen dc dari gelombang tegangan (V) ∞ 𝑖(𝑡) = 𝐼𝑜 + � 𝐼𝑛 𝑐𝑜𝑠(𝑛𝜔𝑡 + 𝜑𝑛 ) ….………..…………(2.2) Dimana: I o = Arus dc (A) 𝑛=1 Tegangan dan arus rms dari gelombang sinusoidal yaitu nilai puncak gelombang dibagi √2 dan secara deret Fourier untuk tegangan dan arus yaitu: Universitas Sumatera Utara ∞ 2 𝑉𝑟𝑚𝑠 = 𝑉𝑜 + � � � 2 𝑛=1 ∞ √2 𝐼𝑟𝑚𝑠 = 𝐼𝑜 + �� � 𝑛=1 𝑉𝑛 � 𝐼𝑛 √2 2 � …..…...………………………. (2.3) 2 ….……..…….......……………. (2.4) THD tegangan dan arus didefinisikan sebagai nilai rms harmonisa di atas frekuensi fundamental dibagi dengan nilai rms fundamentalnya, dengan tegangan dc-nya diabaikan. THD tegangan sebagai berikut: 𝑇𝐻𝐷𝑣 = 2 �∑∞ 𝑛=2(𝑉𝑟𝑚𝑠 ) 𝑉1 𝑟𝑚𝑠 ....…..……...………………. (2.5) Dengan mengabaikan tegangan dc (V o ) dan nilai V rms digantikan dengan 𝑉𝑛 /√2 pada Persamaan (2.5), sehingga THD dapat dituliskan dalam persamaan berikut: 𝑇𝐻𝐷𝑣 = � ∑∞ 𝑛=2 � 𝑉1 √2 𝑉𝑛 2 � √2 …………...………..…….…….. (2.6) THD arus sebagai berikut: 2 �∑∞ 𝑛=2(𝐼𝑟𝑚𝑠 ) 𝑇𝐻𝐷𝑖 = 𝐼1 𝑟𝑚𝑠 …...….………….……….…… (2.7) Universitas Sumatera Utara Dengan mengabaikan arus dc (I o ) dan nilai I rms digantikan dengan 𝐼𝑛 /√2 pada Persamaan (2.7), sehingga THD dapat dituliskan dalam persamaan berikut: 𝑇𝐻𝐷𝑖 = 2.4. �∑∞ 𝑛=2 � 𝐼1 √2 𝐼𝑛 2 � √2 2 �∑∞ 𝑛=2(𝐼𝑛 ) = 𝐼1 ….……..…….…………...… (2.8) Batasan Harmonisa Untuk mengurangi harmonisa pada suatu sistem secara umum tidaklah harus mengeliminasi semua harmonisa yang ada, tetapi cukup dengan mereduksi sebagian harmonisa tersebut sehingga diperoleh nilai di bawah standar yang diizinkan. Hal ini berkaitan dengan analisa secara teknis dan ekonomis, dimana dalam mereduksi harmonisa secara teknis di bawah standar yang diizinkan sementara dari sisi ekonomis tidak membutuhkan biaya yang besar. Standar yang digunakan sebagai batasan harmonisa adalah yang dikeluarkan oleh International Electrotechnical Commission (IEC) yang mengatur batasan harmonisa pada beban beban kecil satu fasa ataupun tiga fasa. Untuk beban tersebut umumnya digunakan standar IEC 61000-3-2. Hal ini disebabkan karena belum adanya standar baku yang dihasilkan oleh IEEE. Pada standar IEC 61000-3-2, beban-beban kecil tersebut diklasifikasikan dalam kelas A, B, C, dan D, dimana masing-masing kelas mempunyai batasan harmonisa yang berbeda-beda yang dijelaskan sebagai berikut [8,9]. Universitas Sumatera Utara a. Kelas A Kelas ini merupakan semua kategori beban termasuk didalamnya peralatan penggerak motor dan semua peralatan 3 fasa yang arusnya tidak lebih dari 16 Ampere perfasanya. Semua peralatan yang tidak termasuk dalam 3 kelas yang lain dimasukkan dalam kategori kelas A. Batasan harmonisanya hanya didefinisikan untuk peralatan satu fasa (tegangan kerja 230V) dan tiga fasa (230/400V) dimana batasan arus harmonisanya seperti yang diperlihatkan Tabel 2.1. Tabel 2.1. Batasan arus harmonisa untuk peralatan kelas A Harmonisa ke-n Arus harmonisa maksimum yang diizinkan (A) Harmonisa Ganjil 3 2,30 5 1,14 7 0,77 9 0,40 11 0,33 13 0,21 15≤n≤39 2,25/n Harmonisa Genap 2 1,08 4 0,43 6 0,30 8≤n≤40 1,84/n Sumber: IEC 61000-3-2 Universitas Sumatera Utara b. Kelas B Kelas ini meliputi semua peralatan tool portable yang batasan arus harmonisanya merupakan harga absolut maksimum dengan waktu kerja yang singkat. Batasan arus harmonisanya diperlihatkan pada Tabel 2.2. Tabel 2.2. Batasan arus harmonisa untuk peralatan kelas B Harmonisa ke-n Arus harmonisa maksimum yang diizinkan (A) Harmonisa Ganjil 3 3,45 5 1,71 7 1,155 9 0,60 11 0,495 13 0,315 15≤n≤39 3,375/n Harmonisa Genap 2 1,62 4 0,645 6 0,45 8≤n≤40 2,76/n Sumber: IEC 61000-3-2 c. Kelas C Kelas C termasuk didalamnya semua peralatan penerangan dengan daya input aktifnya lebih besar 25 Watt. Universitas Sumatera Utara Batasan arusnya diekspresikan dalam bentuk persentase arus fundamental. Persentase arus maksimum yang diperbolehkan untuk masing masing harmonisa diperlihatkan Tabel 2.3. Tabel 2.3. Batasan arus harmonisa untuk peralatan kelas C Harmonisa ke-n Arus harmonisa maksimum yang diizinkan (% fundamental) d. 2 2 3 30xPF rangkaian 5 10 7 7 9 5 11≤n≤39 3 Kelas D Termasuk semua jenis peralatan yang dayanya di bawah 600 Watt khususnya yaitu: a. Personal komputer. b. Monitor. c. TV. Batasan arusnya diekspresikan dalam bentuk mA/W dan dibatasi pada harga absolut yang nilainya diperlihatkan Tabel 2.4. Universitas Sumatera Utara Tabel 2.4. Batasan arus harmonisa untuk peralatan kelas D [10] Harmonisa Arus harmonisa maksimum Arus harmonisa maksimum ke-n yang diizinkan yang diizinkan (mA/W) (A) 75 < P < 600W P > 600W 3 3,4 2,30 5 1,9 1,14 7 1,0 0,77 9 0,5 0,40 11 0,35 0,33 13 0,296 0,21 15≤n≤39 3,85/n 2,25/n Sumber: IEC 61000-3-2 Seperti diketahui bahwa hampir semua peralatan elektronik bekerja dengan sumber tegangan arus searah sehingga dalam operasinya dibutuhkan peralatan penyearah dan dihubungkan langsung ke sumber tegangan bolak balik. Untuk penyearah yang terdistorsi gelombang arusnya cukup tinggi dan banyak dipakai secara bersamaan dimasukkan dalam kategori kelas D. Sementara untuk penyearah dengan arus yang terdistorsi dapat dimasukkan ke dalam kategori kelas A. Tabel 2.5. memperlihatkan batas harmonisa untuk kelas A dan kelas D dan penyearah dengan daya 100 Watt. Universitas Sumatera Utara Tabel 2.5. Batas arus harmonisa untuk kelas A dan kelas D [11] Harmonisa ke-n Batas klas A (A) Batas klas D Batas Klas D untuk input 100W (mA/W) (A) 3 2,30 3,4 0,34 5 1,14 1,9 0,19 7 0,77 1,0 0,10 9 0,40 0.5 0,05 11 0,33 0,35 0,035 13≤n≤39 0,15x15/n 3,85/n 0,386/n Sumber: IEC 61000-3-2 2.5. Penyearah Terkendali Penyearah terkendali merupakan beban tidak linier yang banyak menyumbang harmonisa pada saluran tenaga listrik. Penyearah terkendali dapat diatur tegangan keluarannya dengan merubah sudut penyalaan atau trigger pada thyristor. Penyearah terkendali dapat dibedakan yang dalam 6 (enam) jenis, yakni [12]: a. Penyearah terkendali satu fasa semiconverter. b. Penyearah terkendali satu fasa full converter. c. Penyearah terkendali satu fasa dual converter. d. Penyearah terkendali tiga fasa semiconverter. e. Penyearah terkendali tiga fasa full converter. f. Penyearah terkendali tiga fasa dual converter. Universitas Sumatera Utara Banyaknya urutan harmonisa yang dibangkitkan (n) oleh beban penyearah tergantung pada kelipatan dari frekuensi dasar dengan jumlah pulsa dari penyearah, dapat dihitung dengan menggunakan Persamaan (2.9) [13,14]. 𝑛= Dimana: 𝑓𝑛 𝑓1 = 𝑘. 𝑝 ± 1 ……………....……………………………(2.9) n = urutan harmonisa yang dibangkitkan. k = kelipatan dari frekuensi dasar = 1, 2, 3, dan seterusnya. p = jumlah pulsa dari penyearah. 2.5.1. Penyearah terkendali satu fasa full converter Penyearah tekendali satu fasa full converter tersusun dari 4 buah thyristor seperti pada Gambar 2.2 digunakan untuk mensuplai daya listrik pada lilitan jangkar dimana tegangan lilitan jangkar untuk mengatur kecepatan putar motor arus searah baik untuk starting maupun running saat kerja pada rangkaian terbuka [12]. is + + vp vs - - + 1 3 R v0 4 L 2 + io= Ia - - (a) Rangkaian Universitas Sumatera Utara O n T3 vs vm T4 0 α T3 T4 T1 T2 ν= vm Sin ωt ∏ ωt 2∏ ∏+α v0 α 0 Ia 2∏ ∏ t ∏+α io Arus Beban 0 Ia 0 - Ia ω ∏ is α (b) 2∏ ∏+α 2∏ ∏ ωt ωt Bentuk Gelombang Gambar 2.2. Full converter satu fasa [12] Rangkaian full converter satu fasa tampak seperti Gambar 2.2 dengan beban induktif yang tinggi sehingga arus beban kontinyu dan bebas dari ripple. Tegangan output dapat ditentukan dari persamaan berikut ini [12]. 𝑉𝑑𝑐 = 𝑉𝑑𝑐 = 2 𝜋+𝛼 ∫ 2𝜋 𝛼 𝑉𝑚 𝜋 𝑉𝑚 sin(𝜔𝑡) 𝑑(𝜔𝑡) = [cos α + cos 𝛼] = 2𝑉𝑚 𝜋 2𝑉𝑚 2𝜋 [− cos(𝜋 + 𝛼) + cos 𝛼] [cos α] ……………...….…… (2.10) Arus input sesaat dapat dinyatakan dalan bentuk deret Fourier seperti: 𝑖𝑠 (𝑡) = 𝑎0 + ∑∞ 𝑛=1,2,…(𝐴𝑛 cos 𝑛𝜔𝑡 + 𝐵𝑛 sin 𝑛𝜔𝑡) Dimana: 𝑎0 = 1 2𝜋+𝛼 ∫ 2𝜋 𝛼 𝑖𝑠 (𝑡) 𝑑(𝜔𝑡) = 1 2𝜋 𝜋+𝛼 �∫𝛼 2𝜋+𝛼 𝐼𝑎 𝑑(𝜔𝑡) − ∫𝜋+𝛼 𝐼𝑎 𝑑(𝜔𝑡)� =0 Universitas Sumatera Utara 𝑎𝑛 = 1 2𝜋+𝛼 � 𝑖𝑠 (𝑡) cos 𝑛𝜔𝑡 𝑑(𝜔𝑡) 𝜋 𝛼 1 𝜋+𝛼 = �∫𝛼 𝜋 = − = 0 4𝐼𝑎 (sin 𝑛𝛼) 𝑛𝜋 untuk n = 1, 3, 5, … untuk n = 2, 4, 6, … 1 2𝜋+𝛼 𝑏𝑛 = � 𝑖𝑠 (𝑡) sin 𝑛𝜔𝑡 𝑑(𝜔𝑡) 𝜋 𝛼 1 𝜋+𝛼 = �∫𝛼 𝜋 = 2𝜋+𝛼 𝐼𝑎 cos 𝑛𝜔𝑡 𝑑(𝜔𝑡) − ∫𝜋+𝛼 𝐼𝑎 cos 𝑛𝜔𝑡 𝑑(𝜔𝑡)� 2𝜋+𝛼 𝐼𝑎 sin 𝑛𝜔𝑡 𝑑(𝜔𝑡) − ∫𝜋+𝛼 𝐼𝑎 sin 𝑛𝜔𝑡 𝑑(𝜔𝑡)� 4𝐼𝑎 (cos 𝑛𝛼) 𝑛𝜋 untuk n = 1, 3, 5, … = 0 untuk n = 2, 4, 6, … Karena a 0 = 0, arus input dapat dituliskan sebagai: ∞ Dimana: 𝑖𝑠 (𝑡) = � 𝑛=1,3,5 √2 Isn sin(𝑛𝜔𝑡 + 𝜙𝑛 ) 𝜙𝑛 = 𝑡𝑎𝑛−1 𝑎𝑛 𝑏𝑛 = −𝑛𝛼 𝜙𝑛 adalah perubahan sudut dari harmonisa n arus. Nilai rms harmonisa n arus input, diberikan oleh persamaan: 𝐼𝑠𝑛 = 1 √2 �𝑎𝑛 2 + 𝑏𝑛 2 � 1� 2 = 4 𝐼𝑎 √2𝑛𝜋 = 2√2𝐼𝑎 ……..………….. 𝑛𝜋 (2.11) Nilai rms arus input dapat dihitung dari Persamaan (2.11) sebagai berikut: 1/2 2 𝐼𝑠 = �∑∞ 𝑛=1,2,… 𝐼 𝑠𝑛 � ……………………….……(2.12) Universitas Sumatera Utara I s juga dapat dihitung secara langsung dari: 1/2 2 𝜋+𝛼 2 𝐼𝑠 = � � 𝐼𝑎 𝑑(𝜔𝑡)� 2𝜋 𝛼 Total Harmonic Distortion: 𝐼𝑠 2 = 𝐼𝑎 1 2 𝑇𝐻𝐷 = �� � − 1� …………..….……………….. (2.13) 𝐼𝑠1 2.6. Penyearah PWM Penyearah dioda dan penyearah thyristor yang dikendalikan sudut fasanya masih banyak digunakan dalam aplikasi tertentu karena faktor kesederhanaan dan biaya yang rendah, tetapi penyearah jenis ini akan mengurangi kualitas daya pada sisi ac masukan yang disebabkan adanya kandungan harmonisa yang masih besar serta faktor daya yang relatif rendah. Teknik modulasi lebar pulsa (PWM = Pulse Width Modulation) banyak diterapkan pada aplikasi penyearah [15]. Konverter ac-dc yang menggunakan penyearah PWM beroperasi dengan menjaga frekuensi dijaga konstan dan waktu divariasikan, dengan demikian lebar pulsa bervariasi [12]. Dengan teknik ini, penyearah akan memiliki distorsi arus masukan yang rendah, faktor daya yang tinggi, filter masukan relatif lebih kecil. Penyearah dikontrol dengan cara menggunakan bentuk arus yang diperlukan [16]. PWM akan menarik arus dari sumber hampir mendekati bentuk gelombang sinusoidal. PWM sangat baik digunakan untuk meningkatkan faktor kerja penyearah dan Universitas Sumatera Utara mengurangi harmonisa arus masukan, karena tipe kontrol PWM dapat dinyalakan dan dimatikan beberapa kali setiap setengah siklus, sehingga dapat meredam harmonisa pada arus masukan. Bentuk rangkaian dan prinsip kerja dari penyearah PWM satu fasa seperti yang tampak pada Gambar 2.3 penyearah PWM full bridge, dimana menggunakan empat buah switch daya untuk mengontrol tegangan dc (V o ) [17]. Gambar 2.3. Penyearah PWM satu fasa full bridge. (a) Rangkaian penyearah PWM, rangkaian ekivalen dengan (b) T 1 dan T 4 On, (c) T 2 dan T 3 On, (d) T 1 dan T 3 atau T 2 dan T 4 On [17] Penyearah terdiri dari empat buah transistor IGBT dimana bentuknya seperti itu disebut dengan bentuk full bridge, induktansi diletakkan di sisi input dan kapasitansi diletakkan di sisi output yang dikontrol oleh PWM. Tegangan sumber berupa V s Universitas Sumatera Utara tegangan pada sisi penyearah input berupa V o dengan bentuk gelombang yang sinusoidal yang dipisahkan oleh induktansi input. Penyearah ini bekerja dengan cara: a. Apabila T 1 dan T 4 dalam keadaan on maka T 2 dan T 3 dalam keadaan off , V AFE = V o (Gambar 2.3(b)). b. Apabila T 1 dan T 4 dalam keadaan off, maka T 2 dan T 3 dalam keadaan on, V AFE = -V o (Gambar 2.3(c)). c. Apabila T 1 dan T 3 dalam keadaan on, T 2 dan T 4 dalam keadaan off, atau T 1 dan T 3 dalam keadaan off , T 2 dan T 4 dalam keadaan on, V AFE = 0 (Gambar 2.3(d)). Tujuan untuk mengontrol penyearah yaitu untuk menyerap arus harmonisa dari sumber jaringan, dimana sefasa dengan sumber tegangan. Hal ini didapatkan dengan mengontrol penyearah salah satunya dengan cara modulasi lebar pulsa. Tegangan dan arus dalam kondisi kontrol dapat dilihat seperti pada Gambar 2.4 [18]. Salah satu cara yang bisa dilakukan pada switching transistor seperti yang tampak pada Gambar 2.4 menggambarkan dua keadaan alternatif, yaitu: a. Arus mengalir ke beban (T 1 dan T 4 berkonduksi). b. Penyearah input di short circuit (D 1 dan T 3 berkonduksi). Area hitam menggambarkan konduksi transistor. Area putih menggambarkan elemen pasif berkonduksi. Transistor diturn off dan arus mengalir melalui dioda. Universitas Sumatera Utara U reff U Ug(1) m U r (1) δ Ud Un Ic Un (1) m I d reff i n ( 1) T1; D1 T2; D2 T3; D3 T4; D4 Gambar 2.4. Bentuk gelombang tegangan dan arus pada penyearah PWM [18] 2.7. Filter Harmonisa Tujuan utama dari filter harmonisa adalah untuk mengurangi amplitudo satu frekuensi tertentu dari sebuah tegangan atau arus. Dengan penambahan filter harmonisa pada suatu sistem tenaga listrik yang mengandung sumber-sumber harmonisa, maka penyebaran arus harmonisa keseluruh jaringan dapat ditekan sekecil mungkin. Selain itu filter harmonisa pada frekuensi fundamental dapat Universitas Sumatera Utara mengkompensasi daya reaktif dan dipergunakan untuk memperbaiki faktor daya sistem. Banyak sekali cara yang digunakan untuk memperbaiki sistem khususnya meredam harmonisa yang sudah dikembangkan saat ini. Secara garis besar ada beberapa cara untuk meredam harmonisa yang ditimbulkan oleh beban tidak linier yaitu diantaranya: a. Penggunaan filter pasif pada tempat yang tepat, terutama pada daerah yang dekat dengan sumber pembangkit harmonisa sehingga arus harmonisa terjerat di sumber dan mengurangi peyebaran arusnya. b. Penggunaan filter aktif. c. Kombinasi filter aktif dan pasif. d. Konverter dengan reaktor antar fasa, dan lain-lain. Disamping sistem di atas dapat bertindak sebagai peredam harmonisa, tetapi juga dapat memperbaiki faktor daya yang rendah pada sistem. Jika perbaikan faktor daya langsung dipasang kapasitor terhadap sistem yang mengandung harmonisa, maka akan menyebabkan amplitudo pada harmonisa tertentu akan membesar. 2.8. Filter Pasif Filter pasif dipasang pada sistem dengan tujuan utama untuk meredam harmonisa dan tujuan lain yaitu untuk memperbaiki faktor daya, berupa komponen L, C yang dapat ditala untuk satu atau dua frekuensi. Filter dengan penalaan tunggal ditala pada salah satu orde harmonisa (biasanya pada orde harmonisa rendah). Universitas Sumatera Utara Dalam beberapa kasus, reaktor saja tidak akan mampu mengurangi distorsi harmonisa arus ke tingkat yang diinginkan. Dalam kasus ini sangat diperlukan filter yang lebih baik [20]. L C Gambar 2.5. Filter pasif single tuned [19] Filter pasif terdiri dari kapasitor dan induktor seperti pada Gambar 2.5 yang dituning pada frekuensi harmonisa tunggal dan mempunyai impedansi sangat rendah. Jika filter harmonisa dituning sebagai teknik peredaman harmonisa, maka perlu memberikan filter ganda untuk memenuhi batas distorsi yang ditentukan. Saat filter harmonisa jenis shunt dihubungkan dengan sistem daya, mereka menyebabkan pergeseran frekuensi resonansi alami pada sistem tenaga. L L C Gambar 2.6. Low pass filter harmonic [20] Universitas Sumatera Utara Low pass filter harmonisa pada Gambar 2.6 sebagai penekan luas harmonisa, menawarkan pendekatan untuk meredam harmonisa. Filter dituning untuk harmonisa tertentu, filter tersebut menyaring semua frekuensi harmonisa, termasuk harmonisa ketiga. Filter tersebut terhubung secara seri dengan beban tidak linier dengan impedansi seri besar tersambung. Tidak perlu dilakukan tuning terhadap low pass filter. Karena ada impedansi seri yang besar. Sebaliknya mereka dipasok ke drive melalui kapasitor filter. Untuk alasan ini, sangat mudah untuk memprediksi tingkat distorsi yang akan dicapai dan untuk menjamin hasilnya. Sebuah low pass filter dapat dengan mudah menawarkan tingkat harmonisa arus serendah 8% sampai 12% [20]. 2.9. Filter LCL Filter LCL adalah filter pasif yang terdiri dari komponen-komponen pasif R, L dan C, seperti pada Gambar 2.7. Gambar 2.7. Filter LCL [1] Dari Gambar 2.7 tampak bahwa sebuah filter LCL terbuat dari resistor (R) dan induktor (L) pada sisi penyearah, resistor (R f ) dan induktor (L f ) pada sisi jaringan, dan kapasitor C f (teredam dengan resistor R d ). Universitas Sumatera Utara Filter LCL dapat mereduksi harmonisa arus karena arus harmonisa akan mengalir pada reaktansi yang lebih rendah. Dengan pemasangan C, arus dengan frekuensi tinggi akan mengalir melalui kapasitor karena kapasitor memiliki impedansi yang rendah pada frekuensi tinggi. Agar tegangan beban bebas harmonisa, dipasang filter C yang paralel dengan beban. Dengan menggunakan filter C ini semua riak arus dengan frekuensi tinggi akan mengalir melewati kapasitor bukan ke beban. Filter L biasanya dipasang secara seri terhadap beban. Dengan menggunakan filter L, arus yang mengalir melalui L akan sulit berubah berbanding lurus dengan besarnya L. Filter LCL diletakkan antara jaringan dan beban, seperti pada Gambar 2.8. [1]. Gambar 2.8. Rangkaian Filter LCL pada Penyearah Terkendali Satu Fasa [1] Filter LCL bertujuan untuk mengurangi harmonisa orde tinggi pada sisi jaringan, tetapi desain filter yang buruk dapat menyebabkan redaman yang lebih rendah dibandingkan dengan apa yang diharapkan. Penyearah arus harmonisa dapat menyebabkan kejenuhan induktor atau resonansi filter. Oleh karena itu, induktor harus benar dirancang dengan mempertimbangkan arus ripple, dan filter harus teredam Universitas Sumatera Utara untuk menghindari resonansi. Namun, tingkat redaman dibatasi oleh biaya, nilai dari induktor, kerugian dari kinerja filter [1]. Prosedur untuk memilih filter LCL menggunakan parameter seperti daya dari penyearah aktif, frekuensi jaringan dan frekuensi switching sebagai input. Nilai filter diperoleh sebagai persentase dari nilai dasar, yang diberikan dengan: Zb = 𝐿𝑏 = Cb = Dimana: En 2 Pn ……………………….………………… (2.18) 𝑍𝑏 ……………………..…….……………. (2.19) 1 ...………………..….………………….. (2.20) 𝜔𝑛 ωn Zb Z b : Impendansi dasar (Ω) L b : Induktansi dasar (H) C b : Kapasitansi dasar (F) E n : Tegangan rms (V) P n : Daya aktif yang diserap oleh penyearah (Watt) ω n : Frekuensi jaringan (Hz) Harmonisa tegangan pada sisi penyearah aktif v(h sw ) ≠ 0 dan harmonisa tegangan pada sisi jaringan v g (h sw ) = 0. Rangkaian ekivalen filter LCL untuk h harmonisa dapat dilihat seperti Gambar 2.9 dengan mengabaikan R, R g dan R d (Gambar 2.8). i(h) dam v(h) menunjukkan harmonisa arus dan harmonisa tegangan, sementara h sw adalah orde harmonisa [1]. Universitas Sumatera Utara Gambar 2.9. Ekivalen filter LCL satu fasa pada harmonisa h [1] Redaman riak dari sisi converter hingga sisi sumber, dapat dihitung dengan langkah: ig (hSW ) v(hSW ) i(hSW ) v(hSW ) ig (hSW ) i(hSW ) Dimana: z 2 LC = ω2 res = 1 Lg Cf ≈ = z2 LC ……………….……….……(2.21) ωSW L.|ω2 res −ω2 SW | 1 ωSW L |ω2 .…………………………………….…. (2.22) z2 LC 2 res −ω SW | ………………………………..... (2.23) , LT z2 LC L = , dengan LT = L + Lg ω2 sw = (2πfsw )2 fsw = frekuensi switching ωn = Frekuensi jaringan (Hz) hsw = orde frekuensi harmonisa = ωsw ωn Universitas Sumatera Utara 2.10. Rancangan filter LCL Filter LCL akan dirancang dengan langkah-langkah sebagai berikut [1]: a. Pilih daya reaktif yang diserap pada kondisi rata-rata, ambil x sebagai persentase penyerapan daya reaktif di bawah kondisi rata-rata, tidak boleh melebihi 5%. Dengan demikian besar kapasitor pada filter dapat dihitung dengan Persamaan (2.24). b. Cf = xCb ………….……………………(2.24) Pilih arus ripple untuk dapat menghitung induktansi sisi konverter (L) dengan menggunakan Persamaan (2.22). c. Pilih reduksi arus ripple yang diinginkan. Dengan mengetahui nilai x, reduksi arus ripple dapat dihitung dengan dengan Persamaan (2.25). ig (hSW ) i(hSW ) d. 1 = |1+r(1−a.x)| ………………..….………..(2.25) Dimana 𝑎 = LC b ω sw 2 sebagai konstanta. Dengan mengetahui induktansi sisi konverter (L), maka induktansi sisi jaringan (L g ) dihitung menggunakan indeks r, hubungan dua induktansi: e. 𝐿𝑔 = 𝑟𝐿 …………………………………….…….. (2.26) Uji frekuensi resonansi yang diperoleh dengan cara: ωres = � L+Lg L.Lg. Cf …………...……………………… (2.27) Nilai frekuensi resonansi harus lebih besar sepuluh kali lipat dari frekuensi jaringan dan lebih dari setengah kali frekuensi switching. Universitas Sumatera Utara