BAB II RESPONS STRUKTUR TERHADAP PEMBEBANAN DINAMIK
advertisement

Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
BAB II
RESPONS STRUKTUR TERHADAP PEMBEBANAN DINAMIK
2.1 UMUM
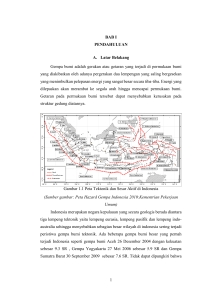
Gempa bumi adalah suatu gerakan tiba–tiba atau suatu rentetan gerakan tiba–tiba
dari tanah dan bersifat transien yang berasal dari suatu daerah terbatas dan
menyebar dari titik tersebut ke segala arah (M. T. Zein). Gempa bumi ini adalah
penyebab goncangan tanah. Goncangan tanah ini menyebabkan suatu gedung
berespons secara khusus, respons ini disebut respons dinamis gedung.
Beban dinamik adalah beban yang merupakan fungsi dari waktu, jadi besar dan
arah beban berubah-ubah tergantung waktu. Apabila struktur menerima beban
dinamik ini maka struktur akan berespons secara dinamik juga, dimana selain
mempunyai simpangan juga mempunyai kecepatan dan percepatan.
Selain sifat perubahan waktu pada masalah dinamik seperti di atas, juga terdapat
sifat lain yaitu pada pembebanan dinamik timbul gaya inersia yang menahan
percepatan struktur akibat pembebanan.
P(t)
Gaya inersia
Gambar 2.1 Struktur dengan pembebanan dinamik
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-1
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
Untuk keadaan seperti pada gambar di atas, analisis gaya inersia sangat rumit
karena massa terdistribusi secara kontinu sepanjang bentang sehingga
perpindahan dan percepatan harus ditetapkan untuk tiap-tiap titik sepanjang
bentang tersebut. Untuk menyederhanakan hal tersebut, massa batang dianggap
terpusat pada titik-titik tertentu. Dengan demikian gaya inersia, perpindahan dan
percepatan hanya terjadi pada titik-titik tersebut. Hal ini yang disebut dengan
konsep massa tergumpal (lumped mass).
Jumlah
komponen
perpindahan
pada
massa
tergumpal
yang
harus
dipertimbangkan agar mewakili pengaruh semua gaya inersia yang penting dari
struktur tersebut disebut jumlah derajat kebebasan dinamik.
Apabila suatu sistem dengan satu massa tergumpal dibuat sedemikian rupa
sehingga massa tersebut hanya dapat bergerak dalam satu arah saja maka disebut
sistem dengan satu derajad kebebasan (SDOF). Komponen-komponen utama
dalam pembebanan dinamik pada sistem SDOF ini adalah massa, sifat elastis
(kekakuan), mekanisme kehilangan energi (redaman) dan beban luar. Percepatan,
kecepatan dan simpangan masing-masing akan menimbulkan gaya inersia, gaya
redaman, dan gaya pegas.
2.2 SIFAT GONCANGAN TANAH
Berdasarkan penyebab goncangan tanah, terdapat beberapa macam gempa bumi,
yaitu :
a. Gempa bumi runtuhan
Gempa bumi ini disebabkan antara lain oleh keruntuhan yang terjadi baik di atas
maupun di bawah permukaan tanah, contohnya tanah longsor, salju longsor, dan
jatuhnya batuan.
b. Gempa bumi vulkanik
Gempa bumi ini disebabkan oleh kegiatan gunung berapi baik sebelum maupun
saat meletusnya gunung berapi tersebut.
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-2
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
c. Gempa bumi tektonik
Gempa bumi ini disebabkan oleh terjadinya pergeseran kulit bumi (litosfer) yang
umumnya terjadi di daerah patahan kulit bumi.
Beberapa retakan yang terdapat pada permukaan tanah kadang-kadang menjadi
besar akibat suatu goncangan gempa dengan arah goncangan gempa adalah
sembarang. Suatu rekaman gempa (earthquake record) terdiri dari tiga bagian
yang diukur dalam masing-masing arah yang tegak lurus, yaitu dua buah
komponen horisontal dan satu buah komponen vertikal sebagaimana yang
dilukiskan dalam Gambar 2.2. Dari gambar ini kita dapat melihat harga
goncangan gempa maksimum, tidak serentak terjadi pada ketiga arah yang saling
tegak lurus. Hasil ini dapat diramalkan apabila sifat goncangan gempa tadi adalah
benar-benar sembarang (semacam random process). Sekarang timbul pertanyaan
lain yaitu apa tolak ukur yang paling tepat digunakan untuk melukiskan
goncangan tanah itu ?
Gambar 2.2 Sifat goncangan gempa
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-3
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
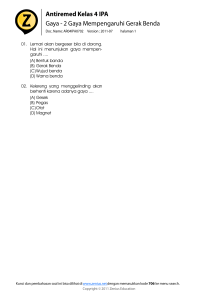
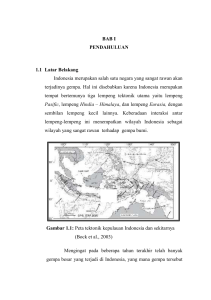
Goncangan atau gerakan tanah dapat dilukiskan dengan menggunakan tolak ukur
perpindahan, kecepatan atau percepatan. Dalam Grafik 2.1 menggambarkan
mengenai rekaman gempa bumi El-Centro (1940) N-S, Amerika Serikat.
Rekaman tersebut dilukiskan dengan menggunakan tolak ukur seperti yang telah
disebutkan di atas.
Bilamana rekaman percepatan dengan waktu diintegrasikan maka akan dihasilkan
rekaman kecepatan dengan waktu. Kemudian bilamana rekaman baru ini
diintegrasikan sekali lagi maka akan dihasilkan rekaman perpindahan dengan
waktu. Dengan kata lain, bilamana kita mengetahui salah satu dari rekamanrekaman tadi maka dengan mudah dapat ditentukan rekaman yang lainnya. Tetapi
mana dari ketiga rekaman tadi yang paling berguna, atau apakah kita harus
menggunakan lebih dari satu bentuk rekaman? Berhubung pengertian kita
terhadap rekaman kecepatan dan perpindahan masih sangat terbatas maka
biasanya kita hanya memakai rekaman percepatan saja untuk analisis dinamik.
Biasanya juga kita mengabaikan pengaruh dari komponen goncangan tanah yang
vertikal dalam perencanaan struktur bangunan gedung. Tetapi untuk beberapa
elemen gedung harus diakui bahwa ada pengaruh goncangan vertikal. Jadi, tiap
bangunan gedung tahan gempa harus direncankan agar dapat menahan goncangan
gempa horisontal, yang terdiri dari dua komponen yang saling tegak lurus.
4.00
Time History Acceleration El Centro
2.00
2
x"g (m/s )
3.00
1.00
0.00
-1.000.00
10.00
20.00
30.00
40.00
50.00
60.00
-2.00
-3.00
t (detik)
Grafik 2.1 Rekaman gempa bumi El-Centro
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-4
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
2.3 RESPONS STRUKTUR DENGAN SATU DAN DUA DERAJAT
KEBEBASAN
Dalam dinamika struktur, jumlah koordinat bebas (independent coordinates)
diperlukan untuk menetapkan susunan atau posisi sistem pada setiap saat, yang
berhubungan dengan jumlah derajat kebebasan (degree of freedom). Pada
umumnya struktur berkesinambungan mempunyai jumlah derajat kebebasan tak
berhingga. Namun dengan posisi idealisasi atau seleksi, sebuah model matematis
yang tepat dapat mereduksi jumlah derajat kebebasan menjadi suatu jumlah diskrit
dan untuk beberapa keadaan dapat menjadi berderajat kebebasan tunggal. Suatu
struktur dapat dianggap sebagai berderajat tunggal bila dapat dimodelisasikan
sebagai sistem dengan koordinat perpindahan tunggal (single displacement
coordinate).
2.3.1 Model Matematik Sistem Dinamik SDOF
Persamaan gerak untuk sistem dengan SDOF dapat diperoleh dengan prinsip
kesetimbangan dari gaya-gaya yang bekerja pada sistem tersebut, yaitu gaya luar
dan gaya-gaya lainnya yang terjadi akibat adanya gerakan-gerakan pada sistem
tersebut, seperti gaya inersia dan gaya elastik pegas seperti terlihat pada Gambar
2.3 di bawah ini.
Gambar 2.3 Sistem dinamik massa-pegas SDOF
Struktur yang paling sederhana pada masalah dinamik dapat diidealisasikan
seperti pada Gambar 2.3, dengan satu derajat kebebasan yaitu translasi lateral.
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-5
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
Sistem berderajat tunggal dapat dijelaskan secara tepat dengan model matematis
yang mempunyai elemen-elemen sebagai berikut: (1) elemen massa m
menyatakan massa dan sifat inersia dari struktur, (2) elemen pegas k yang
menyatakan gaya balik elastis (elastic restoring force) dan kapasitas energi
potensial dari struktur, (3) elemen redaman c yang menyatakan sifat geseran dan
kehilangan energi dari struktur dan (4) gaya pengaruh P(t) yang menyatakan gaya
luar yang bekerja pada sistem struktur.
Sehingga persamaan gerak dapat ditulis sebagai persamaan kesetimbangan dari
gaya-gaya tersebut, yaitu :
FI(t) + FD(t) + FS(t) = P(t)
(2-1)
dimana FI = gaya inersia, FD = gaya redaman, FS = gaya pegas (elastik), P = beban
dinamik, yang semuanya merupakan fungsi dari waktu. Gaya inersia, redaman,
dan elastik dapat diperoleh melalui persamaan :
FI = m&x& (t)
FD = cx& (t)
(2-2)
FS = kx(t)
Substitusi Persamaan (2-2) kedalam Persamaan (2-1) maka persamaan gerak
SDOF adalah :
m&x& (t)+ cx& (t) + kx(t) = P(t)
(2-3)
dimana :
&x&(t )
= percepatan
x& (t )
= kecepatan
x(t)
= perpindahan
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-6
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
dengan m, c dan k berturut-turut adalah massa, redaman dan kekakuan struktur,
P(t) adalah beban dinamik fungsi waktu t yang bekerja pada sistem, yang
selanjutnya untuk alasan praktis, fungsi waktu t dapat tidak ditulis.
Beban gempa bumi adalah beban dari percepatan tanah ( &x&g (t)) bukan beban luar
P(t), sehingga persamaan menjadi :
m( &x& + &x&g ) + cx& + kx = 0
(2-4)
Dalam membahas sifat dinamis dari sistem berderajat kebebasan tunggal,
dianggap bahwa gaya pemulih (restoring forces) selaras dengan perpindahan pada
model yang mewakili struktur. Juga dianggap terjadi kehilangan energi akibat
mekanisme redaman liat dimana gaya redaman selaras dengan kecepatan. Sebagai
tambahan, massa pada model selalu ditetapkan tak berubah. Sebagai akibat dari
anggapan ini, persamaan gerak sistem menjadi persamaan diferensial linear orde
kedua dengan koefisien konstan seperti Persamaan (2-3) di bawah ini :
m&x& (t)+ cx& (t) + kx(t) = P(t)
Persamaan (2-3) menyatakan sifat dinamis dari berbagai struktur dengan model
sebagai sistem berderajat kebebasan tunggal. Namun, ada kondisi fisik dimana
model linear tak dapat menyatakan karakteristik dinamis dari struktur. Analisis
keadaan ini memerlukan suatu model dimana gaya pegas atau gaya redaman tidak
tetap proporsional terhadap perpindahan atau kecepatan. Akibatnya hasil
persamaan gerak tidak linear dan pada umumnya solusi matematisnya lebih rumit
dan sering memerlukan penyelesaian numerik untuk integrasinya.
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-7
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
Pergerakan (respons) SDOF absolut adalah sebagai berikut :
xs
Respons SDOF relatif terhadap dasar struktur
Absolut displacemen x(t) = x1(t) + xs(t)
(x1,0)
(0,0)
x1
&x&g
Gambar 2.4 Idealisasi struktur SDOF yang mengalami gerakan pada tumpuannya
pada saat t
dimana :
FI
= m (&x&s (t ) + &x&g (t ) ) merupakan gaya inersia pada struktur (percepatan
absolut struktur).
FD
= c x& s (t ) merupakan gaya damping (respons relatif).
FS
= kxs(t) merupakan gaya pegas, gaya ini harus dipikul oleh struktur
terutama elemen vertikal (respons relatif).
2.3.2 Respons Getaran Bebas (free vibration)
Respons getaran bebas adalah akibat adanya simpangan dan/atau kecepatan awal
dari struktur. Dalam hal ini beban luar P(t) = 0 (tidak ada). Apabila Persamaan (23) diselesaikan untuk getaran bebas tanpa redaman dengan c dan P(t) = 0 maka
akan diperoleh persamaan umum simpangan :
x(t) =
x& 0
ω
sin ωt + x0 cos ωt
Bab II Respons Struktur Terhadap Pembebanan Dinamik
(2-5)
II-8
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
dimana :
ω
= 2πf =
1 ω
2π
k
(Hz), dengan 1 Hz
(radian/detik), T =
(detik), f = =
m
ω
T 2π
= 1 siklus perdetik dan ω menyatakan frekuensi alami dari sistem tersebut.
x0
= perpindahan awal pada saat t = 0.
x& 0
= kecepatan awal pada saat t = 0.
2.3.3
Respons Getaran Paksa (forced vibration)
Respons ini adalah akibat adanya beban luar dinamik yang berupa beban periodik.
Beban periodik merupakan beban yang mempunyai besar dan bentuk yang sama
setiap selang waktu tertentu.
a. Beban harmonik
Beban harmonik adalah beban periodik yang berbentuk sederhana, biasanya
merupakan fungsi sinus. Beban bervariasi secara harmonik dengan amplitudo F0
dan frekuensi sudut Ω (dari gaya luar) dan didefenisikan sebagai :
P(t) = F0 sin Ωt
Respons dinamik akibat beban harmonik untuk sistem getaran paksa tanpa
redaman adalah :
x(t) =
F0 / k
sin Ωt
(1 − r 2 )
(2-6)
Persamaan (2-6) ini biasa disebut juga sebagai persamaan steady state.
dimana r = perbandingan antara frekunsi gaya luar dengan frekuensi alami sistem,
r=
Ω
ω
.
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-9
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
b. Beban kompleks
Beban kompleks adalah beban periodik dengan bentuk yang lebih kompleks.
Beban ini biasa dinyatakan sebagai Deret Fourier.
Beban harmonik dan beban kompleks merupakan beban yang sifatnya periodik.
Adapula beban-beban luar yang sifatnya non periodik, seperti beban impulsif dan
beban dinamik sembarang.
a. Beban impulsif
Beban impulsif adalah beban yang bekerja dengan waktu yang sangat singkat.
Karena beban bekerja dalam waktu yang sangat singkat maka redaman tidak
mempunyai cukup waktu untuk mengabsorpsi energi impuls sehingga struktur
berespons dengan sistem tanpa redaman sampai terjadinya respons maksimum.
Beban impuls digambarkan sebagai gaya dikalikan dengan waktu terjadinya gaya
tersebut, beban ini dapat digunakan sebagai dasar untuk pengembangan formula
untuk mencari respons beban dinamik sembarang.
b. Beban sembarang
Diasumsikan sebagai kumpulan dari beban impulsif. Beban-beban ini dapat
berupa gaya luar konstan, gaya luar segiempat, gaya luar segitiga, dan gaya luar
sinusoidal.
2.3.4
Sistem Dinamik Dengan Dua Derajat Kebebasan
Sistem dengan dua derajat kebebasan merupakan bagian dari sistem dengan
banyak derajat kebebasan (MDOF). Sistem dinamik dengan dua derajat kebebasan
dapat diperlihatkan pada Gambar 2.5 di bawah ini.
Gambar 2.5 Model massa-pegas dengan dua derajat kebebasan
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-10
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
Persamaan gerak untuk sistem yang diperlihatkan pada Gambar 2.5 adalah :
m1 &x&1 + (c1 + c 2 ) x&1 − c 2 x& 2 + (k1 + k 2 ) x1 − k 2 x 2 = P1
m2 &x&2 + c 2 x& 2 − c 2 x&1 + k 2 x 2 − k 2 x1 = P2
(2-7)
Dalam bentuk matriks, persamaan (2-7) menjadi :
⎡m1
⎢0
⎣
0 ⎤ ⎧ &x&1 ⎫ ⎡c1 + c 2
⎨ ⎬+
m2 ⎥⎦ ⎩ &x&2 ⎭ ⎢⎣ − c 2
− c 2 ⎤ ⎧ x&1 ⎫ ⎡k1 + k 2
⎨ ⎬+
c 2 ⎥⎦ ⎩ x& 2 ⎭ ⎢⎣ − k 2
− k 2 ⎤ ⎧ x1 ⎫ ⎧ P1 ⎫
⎨ ⎬=⎨ ⎬
k 2 ⎥⎦ ⎩ x 2 ⎭ ⎩ P2 ⎭
(2-8)
dimana P1 dan P2 adalah gaya yang masing-masing bekerja pada m1 dan m2.
a. Getaran Bebas
Untuk gerakan bebas tanpa gaya luar maka P1 dan P2 = 0 dan persamaannya
menjadi :
M&x& + Kx = 0
(2-9)
dimana :
⎡m
M= ⎢ 1
⎣0
0⎤
⎡k + k 2
, K =⎢ 1
⎥
m2 ⎦
⎣ − k2
− k2 ⎤
⎧x ⎫
⎧P ⎫
, x = ⎨ 1 ⎬ dan P = ⎨ 1 ⎬ .
⎥
k2 ⎦
⎩ x2 ⎭
⎩ P2 ⎭
Frekuensi alami dari sistem tersebut dapat diperoleh dengan menyelesaikan
Persamaan (2-9).
Solusi non-trivial didapat dengan mencari harga ω yang menganulir harga
determinan matriks.
K − ω 2 M = 0 dan akar-akar persamaan ini adalah ω1 dan ω 2 yang mengandung
k
.
m
dimana : ω1 dan ω 2 adalah frekuensi alami yang ditinjau.
Dengan mensubstitusi ω1 dan ω 2 kedalam Persamaan (2-9) didapat :
2 ⎧x ⎫
2
Δ(ω1 )⎨ 1 ⎬ = Δ (ω1 )φ1 = 0
x
⎩ 2⎭
2
2 ⎧x ⎫
Δ(ω 2 )⎨ 1 ⎬ = Δ(ω 2 )φ 2 = 0
⎩x2 ⎭
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-11
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
dimana φ1 dan φ 2 adalah mode getaran dari sistem. Secara umum dikatakan
bahwa ω1 , φ1 dan ω 2 , φ 2 menyatakan dua buah mode getaran dari sistem.
b. Getaran Paksa
Persamaan gerak umum untuk sistem getaran paksa dengan gaya luar harmonik
adalah :
M&x& + Cx& + Kx = P(t )
(2-10)
dimana gaya luar adalah merupakan fungsi harmonik P(t) = F0 e jΩt .
Jawab dari Persamaan (2-10) dapat diperoleh dengan berbagai pendekatan
misalnya dengan Metode Eksak atau Metode Modal.
2.4 RESPONS STRUKTUR DENGAN BANYAK DERAJAT KEBEBASAN
Analisis dinamis struktur yang dibebani oleh beban sebagai fungsi waktu disebut
analisis yang tertentu (deterministic). Bila beban yang bekerja pada struktur
mempunyai bentuk yang acak dan dalam analisisnya ditentukan secara statistik
maka dinamakan analisis tak tentu (non-deterministic). Beban seperti ini dijumpai
pada ledakan yang terjadi dekat struktur, getaran pada jet dan getaran akibat
gempa.
Getaran akibat gempa termasuk dalam analisis non-deterministic sebab tidak
diketahui harga sesaatnya. Meskipun demikian, fenomena random ini mempunyai
keteraturan bila dianalisis secara statistik. Bila jumlah data yang tersedia cukup
banyak (untuk dianalisis secara statistik) maka hasil yang akan didapat semakin
mendekati kebenaran, sayangnya catatan (rekaman) data gempa yang terbatas.
Struktur akan berespons dinamis jika struktur tersebut menerima gaya luar atau
simpangan awal. Yang dimaksud dengan gaya luar disini adalah beban dinamis
yaitu beban dan arah dan besarnya merupakan fungsi waktu. Beban dinamis
tersebut dapat berupa beban harmonis, beban impulsif ataupun beban yang
diakibatkan oleh gempa.
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-12
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
Sifat dari beban harmonis maupun beban impulsif adalah beban luar murni karena
bekerja langsung pada struktur dan menghasilkan respons struktur yang searah.
Tidak demikian halnya dengan beban yang diakibatkan oleh gempa karena gempa
tidak mengakibatkan gaya luar murni akan tetapi mengakibatkan percepatan
tanah. Percepatan tanah ini akan mengakibatkan struktur berespons secara dinamis
dengan arah berlawanan.
Masalah dinamis yang gaya-gayanya tergantung pada waktu dan yang
menyebabkan getaran pada struktur, perlu diperhitungkan gaya akibat inersia
massa yang mempunyai percepatan. Untuk itu, kita gunakan hukum gerak Newton
kedua yang menyatakan bahwa hasil kali massa dan percepatannya sama dengan
gaya. Dalam prakteknya, beban dinamis ditimbulkan oleh gaya gempa, angin yang
tidak tetap, ledakan, mesin torak atau kejut (impact) akibat beban bergerak.
Asumsi yang digunakan dalam analisis dengan MDOF adalah :
a. Massa perlantai sangat kaku (diafragma).
b. Gaya aksial diabaikan.
c. Derajat Kebebasan (degree of freedom) lateral.
2.4.1 Model Matematik Sistem Dinamik MDOF
Sebagaimana sistem SDOF, persamaan gerak untuk sistem MDOF dapat
diperoleh dari prinsip kesetimbangan gaya-gaya yang bekerja pada sistem
tersebut, yaitu gaya luar, gaya inersia, gaya elastik pegas dan gaya redaman.
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-13
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
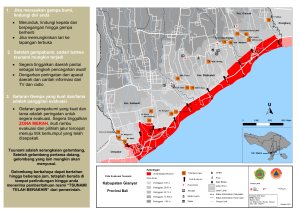
Gambar 2.6 Idealisasi tiga struktur dengan massa tergumpal
Persamaan umum MDOF adalah :
[m]{&x&s + &x&g }+[c] {x& s }+[k]{xs} = P(t)
(2-11)
dimana :
[m]
= matiks massa yang merupakan matriks diagonal
[c]
= matriks redaman
[k]
= matriks kekakuan lateral
{P}
= vektor gaya luar yang bekerja pada massa
{xs}
= vektor simpangan relatif
{x& s }
= vektor kecepatan
{&x&s }
= vektor percepatan relatif
{&x&
= vektor percepatan total
g
+ &x&s }
&x&g (t )
= percepatan gempa (ground).
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-14
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
Persamaan di atas biasa ditulis :
[m]{&x&}+[c] {x&}+[k]{x} = -[m] {&x&g }
(2-12)
Semua matriks di atas berdimensi (nxn), sedangkan semua vektor berdimensi
(1xn) dimana n adalah jumlah derajat kebebasan horisontal yang sama dengan
jumlah lantai tingkat dari struktur yang ditinjau.
m10 &x&10 = F10 (t )
k10 ( x10 − x9 )
m9 &x&9 = F9 (t )
k9 ( x9 − x8 )
m8 &x&8 = F8 (t )
k8 ( x8 − x7 )
m7 &x&7 = F7 (t )
k 7 ( x7 − x6 )
m6 &x&6 = F6 (t )
k 6 ( x6 − x5 )
m5 &x&5 = F5 (t )
k5 ( x5 − x4 )
m4 &x&4 = F4 (t )
k 4 ( x4 − x3 )
m3 &x&3 = F3 (t )
k3 ( x3 − x2 )
m2 &x&2 = F2 (t )
k 2 ( x2 − x1 )
m1 &x&1 = F1 (t )
k1 x1
Gambar 2.7 Pemodelan bangunan menjadi sistem lumped mass
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-15
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
Berdasarkan kesetimbangan gaya dari Gambar 2.7, diperoleh gaya-gaya yang
bekerja pada setiap massa (untuk 5 lantai) :
..
m1 x1 + k1 x1 − k 2 ( x 2 − x1 ) − P1 = 0
..
m2 x 2 + k 2 ( x 2 − x1 ) − k 3 ( x3 − x 2 ) − P2 = 0
..
m3 x 3 + k 3 ( x3 − x 2 ) − k 4 ( x 4 − x3 ) − P3 = 0
(2-13)
..
m4 x 4 + k 4 ( x 4 − x3 ) − k 5 ( x5 − x 4 ) − P4 = 0
..
m5 x 5 + k 5 ( x5 − x 4 ) − P5 = 0
Dalam bentuk matriks dapat ditulis sebagai :
⎡m1
⎢0
⎢
[M ] = ⎢ 0
⎢
⎢0
⎢⎣ 0
0
0
0
m2
0
0
0
0
m3
0
0
m4
0
0
0
⎡ k1 + k 2
⎢ −k
2
⎢
[K ] = ⎢ 0
⎢
⎢ 0
⎢⎣ 0
0⎤
0 ⎥⎥
0 ⎥ merupakan matriks massa.
⎥
0⎥
m5 ⎥⎦
− k2
k 2 + k3
0
− k3
0
0
− k3
k3 + k 4
− k4
0
− k4
k 4 + k5
0
0
− k5
0 ⎤
0 ⎥⎥
0 ⎥ merupakan matriks kekakuan.
⎥
− k5 ⎥
k 5 ⎥⎦
Vektor {X}, { X&& } dan {P} adalah masing-masing vektor perpindahan, vektor
percepatan dan vektor beban gempa, seperti ditunjukkan di bawah ini :
⎡ P1 (t ) ⎤
⎡ &x&1 ⎤
⎡ x1 ⎤
⎢ P (t )⎥
⎢ &x& ⎥
⎢x ⎥
⎢ 2 ⎥
⎢ 2⎥
⎢ 2⎥
&
&
{ X } = ⎢ x3 ⎥, { X } = ⎢ &x&3 ⎥, {P} = ⎢ P3 (t ) ⎥
⎥
⎢
⎢ ⎥
⎢ ⎥
⎢ P4 (t )⎥
⎢ &x&4 ⎥
⎢ x4 ⎥
⎢⎣ P5 (t ) ⎥⎦
⎢⎣ &x&5 ⎥⎦
⎢⎣ x5 ⎥⎦
Bab II Respons Struktur Terhadap Pembebanan Dinamik
(2-14)
II-16
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
Dalam bentuk matriks notasi dapat ditulis sebagai berikut :
[M] { X&& }+ [K]{X} = {P}
dimana :
[M]
= matriks massa
[K]
= matriks kekakuan.
Solusi umumnya dapat ditulis sebagai : {X} = {Xh} + {Xk}
dimana :
{Xh} = vektor perpindahan solusi homogen
{Xk} = vektor perpindahan solusi khusus
Dan solusi homogennya dapat ditulis sebagai :
[M]{ X&& } + [K]{X} = 0
(2-15)
Apabila solusi homogen berbentuk fungsi sinusoidal, maka perpindahannya
menjadi :
xi(t) = Ai cos ωt + Bi sin ωt
x& i (t) = -ωAi sin ωt + ωBi cos ωt
&x&i (t) = -ω2Ai cos ωt -ω2Bi sin ωt = -ω2 xi
(2-16)
Apabila Persamaan (2-16) disubstitusi ke Persamaan (2-15) akan didapatkan :
-ω2[M]{X} + [K]{X} = 0
ω2[M]{X} = [K]{X}
[K] −1 [K]{X} = ω2[K] −1 [M]{X}
1
ω
2
[I]{X} = [K] −1 [M]{X}
1 ⎤
⎡ -1
⎢⎣[K] [M] - ω 2 [I]⎥⎦ {X} = 0, bentuk ini dapat diubah menjadi persamaan di bawah
ini :
1 ⎤
⎡
⎢⎣[ A] − λ [ I ]⎥⎦{ X } = 0
Bab II Respons Struktur Terhadap Pembebanan Dinamik
(2-17)
II-17
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
Dimana [A] = [K] −1 [M] yang merupakan matriks dinamik dan λ =
1
ω2
yang
biasa disebut sebagai nilai eigen (eigen value).
⎡k1 + k2 − m1ω2
− k2
0
0
0 ⎤⎡x1 ⎤ ⎡0⎤
⎢
⎥⎢ ⎥ ⎢ ⎥
− k2
− k3
0
0 ⎥⎢x2 ⎥ ⎢0⎥
k2 + k3 − m2ω2
⎢
⎢
− k3
− k4
0
0 ⎥⎢x3 ⎥ = ⎢0⎥
k3 + k4 − m3ω2
⎢
⎥⎢ ⎥ ⎢ ⎥
− k4
− k5 ⎥⎢x4 ⎥ ⎢0⎥
0
0
k4 + k5 − m4ω2
⎢
⎢
− k5
0
0
0
k5 − m5ω2 ⎥⎦⎢⎣x5 ⎥⎦ ⎢⎣0⎥⎦
⎣
Untuk solusi non-trivial maka determinan matriks diatas harus nol, sehingga dapat
ditulis sebagai :
⎤
⎡k1 + k2 − m1ω 2
0
0
0
− k2
⎥
⎢
2
k2 + k3 − m2ω
0
0
− k2
− k3
⎥
⎢
2
⎥ =0
⎢
k3 + k4 − m3ω
0
0
− k3
− k4
⎥
⎢
k4 + k5 − m4ω 2
0
0
− k4
− k5 ⎥
⎢
⎢
k5 − m5ω 2 ⎥⎦
0
0
0
− k5
⎣
Sebagaimana
uraian
kesetimbangan
gaya-gaya
untuk
5
(lima)
lantai,
kesetimbangan gaya-gaya untuk 10 (sepuluh) lantai sama saja, dan setelah
dijabarkan maka akan diperoleh persamaan matriks dengan determinan sebagai
berikut :
2
k1 +k2 −m1ω
−k2
−k2
k2 +k3 −m2ω
−k3
0
−k3
k3 +k4 −m3ω
−k4
0
−k4
k4 +k5 −m4ω
−k5
0
−k5
k5 +k6 −m5ω
−k6
0
0
0
0
2
2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
−k7
0
0
0
0
0
2
2
2
0
0
0
0
−k6
k6 +k7 −m6ω
0
0
0
0
0
−k7
2
k7 +k8 −m7ω
−k8
0
−k8
k8 +k9 −m8ω
−k9
0
0
0
0
0
2
0
2
0
0
0
0
0
0
0
−k9
k9 +k10−m9ω
0
0
0
0
0
0
0
0
−k10
Bab II Respons Struktur Terhadap Pembebanan Dinamik
−k10
2
k10−m10ω
II-18
=0
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
Perhitungan-perhitungan di atas akan dilakukan dengan program Matlab 5.3.
Perhitungan eigen value ( λi ) , frekuensi alami ( ω i =
1 ) , mode getar ( xi )
λi
yang biasa disebut juga sebagai eigen vector { φi } . Vektor-vektor eigen
menggambarkan pola-pola deformasi dari struktur pada setiap frekuensi alaminya.
2.4.2 Normalisasi Mode
Harga dari mode getar { φi } adalah harga relatif, elemen-elemen dari mode getar
menunjukkan perbandingan satu dengan lainnya. Untuk mendapatkan harga mode
getar yang umum maka mode getar yang didapat dari hasil perhitungan problem
eigen harus dinormalisasi terlebih dahulu.
Ada beberapa cara normalisasi mode getar yang biasa digunakan, antara lain :
a. Mode getar untuk setiap modenya dinormalisasi dengan membuat massa
umum Mi menjadi satu φ T Mφ = I .
b. Elemen-elemen tertentu dari setiap mode getar dibuat sama dengan satu satuan
dan elemen lainnya hanya merupakan perbandingan saja.
Pemilihan normalisasi tergantung kepada kebutuhan dan acuan yang digunakan
dalam analisis dinamik.
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-19
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
2.5 GAYA TUMBUKAN
Bila dua buah benda bermassa saling bertumbukan, maka diantara kedua benda
tersebut akan timbul gaya tumbukan atau berturan (Fc) yang arahnya saling
berlawanan satu dengan lainnya, seperti yang ditunjukkan pada Gambar (2-8) di
bawah ini :
Fc=kDt
M1
M2
Gambar 2.8 Gaya tumbukan Fc dari dua massa yang saling bertumbukan
Bila kedua benda tersebut rigid (padat) maka akan terjadi tumbukan yang sangat
singkat dengan amplitudo gaya tumbukan yang ditimbulkan akan sangat besar.
Persamaan gerak dari kedua massa selama tumbukan dapat ditulis sebagai berikut:
Sistem 1 : [M] 1 [ X&& ] 1 + [K] 1 [X] 1 + [Fc] = P(t)
Sistem 2 : [M] 2 [ X&& ] 2 + [K] 2 [X] 2 - [Fc] = P(t)
(2-18)
dimana :
P(t)
= adalah beban gempa yang bekerja pada sistem.
Fc
= adalah gaya bentur yang bekerja pada struktur yang merupakan gaya
luar.
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-20
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
Indeks pada persamaan-persamaan di atas menunjukkan bangunan ke-1 dan ke-2.
Besarnya gaya tumbukan Fc bergantung pada perilaku dinamis zona kontak
massa dan kecepatan tumbukan. Perilaku zona kontak biasanya disimulasikan
dengan model matematis. Penyelesaian persamaan gerak selama tumbukan
dilakukan dengan menggunakan metode numerik, dalam skripsi ini digunakan
metode Runga-Kutta.
Benturan akan terjadi bila jarak benturan (gap atau Dt) antara dua buah model
tidak mencukupi (negatif atau nol), dan dapat ditulis dalam bentuk :
Dt = Initial gap + x 2 − x1
(2-19)
Initial gap
Dt
x2
x1
M1
M1
M2
M2
&x&g
Gambar 2.9 Jarak Benturan (Dt)
dimana :
x1
= Displacement relatif massa ke-1.
x2
= Displacement relatif massa ke-2.
Dt
= Jarak benturan.
Initial gap
= Jarak antara bangunan yang berdampingan.
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-21
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
2.6 INTEGRASI NUMERIK RUNGA-KUTTA
Untuk sistem dinamik dengan banyak derajad kebebasan yang mengalami beban
sembarang seperti beban gempa, angin, gelombang laut, beban mesin atau beban
dinamik sembarang lainnya, respon struktur dapat dihitung dengan menggunakan
integrasi numerik Runga-Kutta.
Integrasi numerik metode Runga-Kutta banyak digunakan karena ketepatan dan
kemudahannya. Metode ini adalah metode numerik yang mereduksi persamaan
diferensial orde kedua menjadi dua persamaan diferensial orde pertama.
Persamaan diferensial tingkat dua dari sistem dinamik dengan n-derajat kebebasan
adalah :
[ X&& ] = [ M ] −1{[ P(t )] − [C ][ X& ] − [ K ][ X ] = [G ( X , X& , t )]
(2-20)
Persamaan di atas dapat juga ditulis menjadi dua buah persamaan diferensial
tingkat satu, yaitu :
[ X& ] = [Y ]
[Y& ] = [G ( X , Y , t )]
(2-21)
Respons struktur sebagai fungsi waktu untuk setiap interval waktu Δt dapat
dihitung dengan menggunakan persamaan :
1
[ X (t n + h)] = [ X (t n )] + h([Y1 ] + 2[Y2 ] + 2[Y3 ] + [Y4 ])
6
1
[ X& (t n + h)] = [ X& (t n )] + h([G1 ] + 2[G2 ] + 2[G3 ] + [G4 ])
6
−
1
[ X&& (t n + h)] = M [ P(t n )] − [C ][ X& (t n )] − [ K ][ X (t n )]
Bab II Respons Struktur Terhadap Pembebanan Dinamik
(2-22)
II-22
Laporan Tugas Akhir
Pemodelan Numerik Respons Benturan Tiga Struktur Akibat Gempa
dimana :
T1 = t i
[X1] = [X i ]
[Y1] = [Y i ]
[G1] =
[G(T1,X1,Y1)]
T2 = t i +
h
2
[X2] = [X i ] + [Y1]
h
2
[Y2] = [Y i ]+[P1]
h
2
[G2] =
[X3] = [X i ] + [Y2]
h
2
[Y3] = [Y i ]+[P2]
h
2
[G3] =
[X4] = [X i ] + [Y3]
h
2
[Y3] = [Y i ]+[P3] h
[G3] =
[G(T2,X2,Y2)]
T3 = t i +
h
2
[G(T3,X3,Y3)]
T4 = t i +
h
2
[G(T4,X4,Y4)]
(2-23)
h = Δt , X i dan Y i adalah vektor respons awal pada setiap iterasi.
Bab II Respons Struktur Terhadap Pembebanan Dinamik
II-23