T1_612011802_BAB III
advertisement

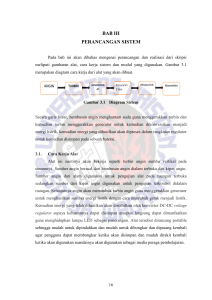
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari skripsi meliputi gambaran alat, cara kerja system dan modul yang digunakan. Gambar 3.1 merupakan diagram cara kerja dari alat yang akan dibuat. Gambar 3.1 Blok Diagram Alat 3.1 Cara Kerja Sistem Secara garis besar system ini terdiri dari pompa air yang berfungsi membuat arus air yang dapat diatur besar debit airnya. Besar debit air diukur secara manual. Selanjutnya laju air tersebut akan menumbuk sudu turbin kemudian menggerakkan generator. Output dari generator akan distabilkan oleh konverter DC-DC (regulator voltage) agar keluarannya dapat digunakan untuk mengisi aki. Output generator akan ditampilkan dalam display tegangan dan arus, begitu juga dengan output dari regulator. 13 3.2 Perancangan Perangkat Keras Pada sub bab ini akan dijelaskan perangkat keras yang digunakan sistem, secara garis besar terdiri dari beberapa bagian yaitu pompa air, turbin darrieus, turbin gorlov, turbin achard, generator, mikrokontroler Arduino Mega, meja alat, modul regulator dan display, modul pengatur kecepatan pompa air, modul catu daya. 3.2.1 Pompa Air Menggunakan pompa air Lifetech SP-609 berdaya output motor maksimal 130W dengan kapasitas debit air maksimal 9000L/jam pada Head 5m. Gambar 3.2 Pompa Air Lifetech SP-609 Diameter lubang air keluar sebesar 1inch = 2,54cm sehinggajarijarinya sebesar 1,27cm, pompa setelah di kalibrasi manual besar debit maksimal aliranya adalah sekitar 92,36L/menit sehingga dapat dicari besar potensi daya dari fluida tersebut. 𝐴 = 𝜋𝑟 2 ……………….… (3.1) 𝐴 = 22⁄7 × ( 1,27 × 10−2 )2 = 0,50 × 10−3 𝑚2 3 𝑄 = 92,36 𝐿⁄𝑚𝑒𝑛𝑖𝑡 = 1,54 × 10−3 𝑚 ⁄𝑠 𝑄 = 𝐴 × 𝑣 ……………….. (3.2) 3 1,54 × 10−3 𝑚 ⁄𝑠 = 0,50 × 10−3 𝑚2 × 𝑣 1,54 × 10−3 𝑚 ⁄ = 3,08 𝑚⁄𝑠 𝑣= 0,50 × 10−3 𝑠 14 𝑃= 𝑃= 1 2 × 𝜌 × 𝑄 × 𝑣 2 ……..(3.3) 1 × 1000 × 1,54 × 10−3 × 3.082 2 𝑃 = 7,30 Kg m ⁄ 2 = 7,30 Watt s Dimana : 𝑃 = Daya air yang tersedia … … … … … … … … … Kg m⁄ s2 3 𝑄 = Debit aliran air … … … … … … … … … … … . … … m ⁄s Kg 𝜌 = massa jenis air … … … … … … … … … … … … … . . ⁄ 3 m 𝐴 = Luas penampang aliran air … … … … … . … … . . m2 𝑣 = Kecepatan aliran air … … … … … . … … . … … … . . m⁄s 𝑟 = Jari − jari lubang air … … … … … . … … . … … … . . m Sehingga didapat besar daya yang tersedia pada air sebesar 7,30Watt yang nantinya akan digunakan sebagai perhitungan pada efisiensi turbin. Gambar 3.3 Skema Pompa Air dan Pengatur Debit Air Rangkaian diatas bekerja dengan cara analog merubah tegangan supply pada pompa air dengan mengatur menggunakan potensiometer dan kemudian diac (dioda AC) berfungsi sebagai pemicu atau trigger pada triac yang mempengaruhi besarnya tegangan bias pada triac. Dimana semakin besar bias gate pada triac yang diberikan maka semakin besar pula level tegangan yang diberikan pada pompa air sehingga mempengaruhi besar debit air yang dikeluarkan dan sebaliknya. 15 Gambar 3.4 Realisasi Pengatur Debit Air 3.2.2 TurbinDarrieus Semua turbin dalam perancangan ini memiliki 2 bagian yang pertama bagian sudunya dan kedua penyangga sudu. Sudu adalah bagian dari turbin atau sering juga di sebut blade atau bilah dimana terjadinya konversi energi tumbukan antara arus air dengan turbin. Turbin darrieus memiliki dimensi panjang 15cm dengan diameter 15cm dan memiliki 3 sudu. Bentuk sudu turbin darrieus lurus memanjang keatas dan memiliki bentuk airfoil NACA 0015 dimana bentuk NACA ini adalah simetris, panjang sudu 4cm dengan lebar 2cm dan tingginya 15cm. Bahan dari sudu turbin adalah resin yang sudah diberi katalisator sehingga mengeras dan dapat dibentuk sesuai dengan yang diinginkan. 16 Gambar 3.5 Sudu Turbin Darrieus Dengan NACA 0015 Sedangkan bentuk penyangga dari sudu turbin darrieus memiliki panjang 15cm lebar 14cm dan memiliki tiga penyangga untuk menempatkan sudu yang telah dibuat dengan menggunakan sekrup, dibagian atas penyangga turbin terdapat lubang berdiameter 10mm yang difungsikan untuk memasukkan poros berupa silinder panjang. Berat total turbin darrieus adalah 615gram = 0,615Kg. Besar daya yang dihasilkan turbin darrieus dapat dihitung dengan cara berikut dan akan digunakan untuk mengetahui besar efisiensi dari turbin tersebut. - Kecepatan Sudut Turbin a. Pada saat tanpa beban pulley generator 𝜔 = 72 𝑟𝑝𝑚 = 72 × 2𝜋 𝑟𝑎𝑑 𝑟𝑎𝑑 = 7,53 60 𝑠 𝑠 b. Saat dihubungkan dengan pulley generator 𝜔 = 58 𝑟𝑝𝑚 = 58 × - 2𝜋 𝑟𝑎𝑑 𝑟𝑎𝑑 = 6,07 60 𝑠 𝑠 Kecepatan Turbin 𝒗 = 𝝎 × 𝒓…………………………. (3.4) Dimana : m s rad 𝜔 = Kecepatan Sudut … . . s 𝑣 = Kecepatan … … … … … 17 𝑟 = Jari − jari Turbin … . . m a. Pada saat tanpa beban 𝑚 𝑣 = 7,53 × 0,075 = 0,56 𝑠 b. Saat dihubungkan pulley generator 𝑚 𝑣 = 6,07 × 0,075 = 0,45 - 𝑠 Percepatan Turbin 𝒂 = 𝝎𝟐 × 𝒓…………………………….(3.5) Dimana : 𝑎 = Percepatan … … … … … . . … … … . . m s2 rad 𝜔 = Kecepatan Sudut … … … … … … … . . . s 𝑟 = Jari − jari Turbin … … … … … … … . . . m a. Pada saat tanpa beban 𝑎 = 7,532 × 0,075 = 4,25 𝑚 𝑠2 b. Saat dihubungkan pulley generator 𝑎 = 6.072 × 0,075 = 2,76 - 𝑚 𝑠2 Gaya Translasi Turbin 𝑭𝒕 = 𝒎 ( 𝒗𝟐 𝒓 )………………………… (3.6) Dimana : 𝐹𝑡 = Gaya Translasi Turbin. . … … … . . . N 𝑣 = Kecepatan … … … … … … … . . … … … … m s 𝑟 = Jari − jari Turbin … … … … … … … . . . m 𝑚 = massa turbin dan poros … . . … … . . . kg a. Pada saat tanpa beban 0,562 ) = 3,46 𝑁 𝐹 = 0,615 ( 0,075 b. Saat dihubungkan pulley generator 0,452 𝐹 = 0,615 ( ) = 1,66𝑁 0,075 18 - Torsi Turbin 𝝉 = 𝑭𝒕 × 𝒓…………….……………(3.7) Dimana : 𝜏 = Torsi … … … … … … … … … … . . … … … Nm 𝐹𝑡 = Gaya Translasi Turbin. . … . . … … … . N 𝑟 = Jari − jari Turbin … … … … . . … … . . … . . . m a. Pada saat tanpa beban 𝜏 = 3,46 × 0,075 = 0,25 𝑁𝑚 b. Saat dihubungkan pulley generator 𝜏 = 1,66 × 0,075 = 0,12 𝑁𝑚 - Daya Turbin 𝑷𝑻 = 𝝉 . 𝝎…………………………(3.8) Dimana : 𝑃𝑇 = Daya turbin … … … … … … … … … . Nm⁄s 𝜏 = Torsi … … … … … … … … … … . . … … . Nm 𝜔 = Kecepatan sudut … … … … … … … . . . rad s a. Pada saat tanpa beban 𝑃𝑇 = 0,25 . 7,53 = 1,88 𝑁𝑚⁄𝑠 = 1,88 𝑊𝑎𝑡𝑡 b. Saat dihubungkan pulley generator 𝑃𝑇 = 0,12 . 6,07 = 0,72 𝑁𝑚⁄𝑠 = 0,72 𝑊𝑎𝑡𝑡 - Efisiensi daya turbin 𝜂𝑇 = 𝐷𝑎𝑦𝑎 𝑇𝑢𝑟𝑏𝑖𝑛 0,72 × 100% = × 100% = 9,8% 𝐷𝑎𝑦𝑎 𝐴𝑖𝑟 𝑌𝑎𝑛𝑔 𝑇𝑒𝑟𝑠𝑒𝑑𝑖𝑎 7,30 19 Gambar 3.6 Realisasi Turbin Darrieus 3.2.3 Turbin Gorlov Turbin Gorlov dalam perancangan ini menggunakan 3 sudu turbin dan menggunakan NACA airfoil 4418 dengan berat turbin 615gram = 0,615 Kg. Bentuk sudu turbin gorlov menyerupai bentuk spiral ulir. Gambar 3.7 Sudu Turbin Gorlov Besar daya yang dihasilkan turbin Gorlov dapat dihitung dengan cara berikut dan akan digunakan untuk mengetahui besar efisiensi dari turbin tersebut. 20 - Kecepatan Sudut Turbin a. Pada saat tanpa beban pulley generator 𝜔 = 75 𝑟𝑝𝑚 = 75 × 2𝜋 𝑟𝑎𝑑 𝑟𝑎𝑑 = 7,85 60 𝑠 𝑠 b. Saat dihubungkan dengan pulley generator 𝜔 = 64 𝑟𝑝𝑚 = 64 × - 2𝜋 𝑟𝑎𝑑 𝑟𝑎𝑑 = 6,69 60 𝑠 𝑠 Kecepatan Turbin 𝒗 = 𝝎 × 𝒓…………………………. (3.9) Dimana : m s rad 𝜔 = Kecepatan Sudut … . . s 𝑟 = Jari − jari Turbin … . . m 𝑣 = Kecepatan … … … … … a. Pada saat tanpa beban 𝑚 𝑣 = 7,85 × 0,075 = 0,58 𝑠 b. Saat dihubungkan pulley generator 𝑚 𝑣 = 6,69 × 0,075 = 0,50 𝑠 - Percepatan Turbin 𝒂 = 𝝎𝟐 × 𝒓………………………….(3.10) Dimana : 𝑎 = Percepatan … … … … … . . … … … . . m s2 rad 𝜔 = Kecepatan Sudut … … … … … … … . . . s 𝑟 = Jari − jari Turbin … … … … … … … . . . m a. Pada saat tanpa beban 𝑎 = 7,852 × 0,075 = 4,62 𝑚 𝑠2 b. Saat dihubungkan pulley generator 𝑎 = 6,692 × 0,075 = 3,35 - 𝑚 𝑠2 Gaya Translasi Turbin 𝑭𝒕 = 𝒎 ( 21 𝒗𝟐 𝒓 )……………………… (3.11) Dimana : 𝐹𝑡 = Gaya Translasi Turbin. . … … . . N 𝑣 = Kecepatan … … … … … … … . . … … … m s 𝑟 = Jari − jari Turbin … … … … … … … . . . m 𝑚 = massa turbin dan poros … . . … … . . . kg a. Pada saat tanpa beban 0,582 ) = 2,75 𝑁 𝐹 = 0,615 ( 0,075 b. Saat dihubungkan pulley generator 0,502 𝐹 = 0,615 ( ) = 2,05𝑁 0,075 - Torsi Turbin 𝝉 = 𝑭𝒕 × 𝒓……………….…………(3.12) Dimana : 𝜏 = Torsi … … … … … … … . . … … … . . … … Nm 𝐹𝑡 = Gaya Translasi Turbin … … . . … … … . N 𝑟 = Jari − jari Turbin … … … … … … … . . … . . . m a. Pada saat tanpa beban 𝜏 = 2,75 × 0,075 = 0,20 𝑁𝑚 b. Saat dihubungkan pulley generator 𝜏 = 2,05 × 0,075 = 0,15 𝑁𝑚 - Daya Turbin 𝑷𝑻 = 𝝉 . 𝝎…………………………(3.13) Dimana : 𝑃𝑇 = Daya turbin … … … … … … … … … . Nm⁄s 𝜏 = Torsi … … … … … … … … … … . . … … . Nm 𝜔 = Kecepatan sudut … … … … … … … … . . . rad s a. Pada saat tanpa beban 𝑃𝑇 = 0,20 . 7,85 = 1,57 𝑁𝑚⁄𝑠 = 1,57 𝑊𝑎𝑡𝑡 b. Saat dihubungkan pulley generator 𝑃𝑇 = 0,15 . 6,69 = 1,00 𝑁𝑚⁄𝑠 = 1,00 𝑊𝑎𝑡𝑡 22 - Efisiensi daya turbin 𝜂𝑇 = 𝐷𝑎𝑦𝑎 𝑇𝑢𝑟𝑏𝑖𝑛 1,00 × 100% = × 100% = 13,69% 𝐷𝑎𝑦𝑎 𝐴𝑖𝑟 𝑌𝑎𝑛𝑔 𝑇𝑒𝑟𝑠𝑒𝑑𝑖𝑎 7,30 Gambar 3.8 Realisasi Turbin Gorlov 3.2.4 Turbin Achard and Maitre Turbin Achard dalam perancangan ini menggunakan 3 sudu turbin dan menggunakan NACA airfoil 4418. Dengan berat 0,615Kg dan sudunya berbentuk delta. Gambar 3.9 Gambar Sudu Turbin Acahrd 23 Besar daya yang dihasilkan turbin Achard dapat dihitung dengan cara berikut dan akan digunakan untuk mengetahui besar efisiensi dari turbin tersebut. - Kecepatan Sudut Turbin a. Pada saat tanpa beban pulley generator 𝜔 = 74 𝑟𝑝𝑚 = 74 × 2𝜋 𝑟𝑎𝑑 𝑟𝑎𝑑 = 7,74 60 𝑠 𝑠 b. Saat dihubungkan dengan pulley generator 𝜔 = 60 𝑟𝑝𝑚 = 60 × - 2𝜋 𝑟𝑎𝑑 𝑟𝑎𝑑 = 6,28 60 𝑠 𝑠 Kecepatan Turbin 𝒗 = 𝝎 × 𝒓………………………… (3.14) Dimana : m s rad 𝜔 = Kecepatan Sudut … . . s 𝑣 = Kecepatan … … … … … 𝑟 = Jari − jari Turbin … . . m a. Pada saat tanpa beban 𝑚 𝑣 = 7,74 × 0,075 = 0,58 𝑠 b. Saat dihubungkan pulley generator 𝑚 𝑣 = 6,28 × 0,075 = 0,47 𝑠 - Percepatan Turbin 𝒂 = 𝝎𝟐 × 𝒓……………………….(3.15) Dimana : 𝑎 = Percepatan … … … … … . . … … … . . m s2 rad 𝜔 = Kecepatan Sudut … … … … … … … . . . s 𝑟 = Jari − jari Turbin … … … … … … … . . . m a. Pada saat tanpa beban 𝑎 = 7,742 × 0,075 = 4,49 24 𝑚 𝑠2 b. Saat dihubungkan pulley generator 𝑎 = 6.282 × 0,075 = 2,96 - 𝑚 𝑠2 Gaya Translasi Turbin 𝑭𝒕 = 𝒎 ( 𝒗𝟐 )……………………… (3.16) 𝒓 Dimana : 𝐹𝑡 = Gaya Translasi Turbin. . … . . … . . N 𝑣 = Kecepatan … … … … … … … … … … … m s 𝑟 = Jari − jari Turbin … … … … … … … . . . m 𝑚 = massa turbin dan poros … . . … … . . . kg a. Pada saat tanpa beban 0,582 𝐹 = 0,615 ( ) = 2,76 𝑁 0,075 b. Saat dihubungkan pulley generator 0,472 𝐹 = 0,615 ( ) = 1,81𝑁 0,075 - Torsi Turbin 𝝉 = 𝑭𝒕 × 𝒓……………….…………(3.17) Dimana : 𝜏 = Torsi … … … … … … … . . … … . . … … … Nm 𝐹𝑡 = Gaya Translasi Turbin … . . … … … . N 𝑟 = Jari − jari Turbin … … … … … . . … . . … . . . m a. Pada saat tanpa beban 𝜏 = 2,76 × 0,075 = 0,21 𝑁𝑚 b. Saat dihubungkan pulley generator 𝜏 = 1,81 × 0,075 = 0,13 𝑁𝑚 - Daya Turbin 𝑷𝑻 = 𝝉 . 𝝎…………………………(3.18) Dimana : 𝑃𝑇 = Daya turbin … … … … … … … … … . Nm⁄s 𝜏 = Torsi … … … … … … … … … … . . … … . Nm 25 𝜔 = Kecepatan sudut … … … … … … … . . . rad s a. Pada saat tanpa beban 𝑃𝑇 = 0,21 . 7,74 = 1,62 𝑁𝑚⁄𝑠 = 1,62 𝑊𝑎𝑡𝑡 b. Saat dihubungkan pulley generator 𝑃𝑇 = 0,13 . 6,28 = 0,81 𝑁𝑚⁄𝑠 = 0,81 𝑊𝑎𝑡𝑡 - Efisiensi daya turbin 𝜂𝑇 = 0,81 𝐷𝑎𝑦𝑎 𝑇𝑢𝑟𝑏𝑖𝑛 × 100% = × 100% = 11,09% 𝐷𝑎𝑦𝑎 𝐴𝑖𝑟 𝑌𝑎𝑛𝑔 𝑇𝑒𝑟𝑠𝑒𝑑𝑖𝑎 7,30 Gambar 3.10 Realisasi Turbin Achard 3.2.5 Sensor Tegangan dan Arus Sensor tegangan yang digunakan adalah dengan rangkaian pembagi tegangan. Rangkaian ini digunakan untuk mengurangi besarnya tegangan yang masuk ke input analog pada mikrokontroler arduino yang hanya bisa mendeteksi tegangan sebesar 5V. Rumus pembagi tegangan : 𝑉𝑜𝑢𝑡 = 𝑅2 × 𝑉𝑖𝑛 𝑅1 + 𝑅2 26 Gambar 3.11 Rangkaian Pembagi Tegangan Sedangkan untuk sensor arus pada keluaran generator menggunakan hambatan 1 Ohm untuk dilihat nilai perbandingan tegangan masuk sebelum resistor dan sesudah resistor kemudian di masukkan pada inputan positif dan negatif pada differential amplifier yang dikuatkan 100 kali untuk kemudian dimasukkan pada inputan ADC arduino. XL 6009 1 Ohm input 12V +V Output 10k + + VG2 ADC Arus - Generator LM324 1M 1M Ground Ground 10k Gambar 3.12 Sensor Arus Dengan Differential Amplifier Besarnya arus pada beban di regulator dapat dilihat dengan menggunakan beban resistor yang kemudian di buat pembagi tegangan dengan hambatan 1 Ohm dan keluaran pembagi tegangan dikuatkan dengan Non Inverting Amplifier agar dapat dibaca pada ADC arduino 27 12V +V XL 6009 input S3 12V +V + Output + ADC Arus LM324 22 Ohm 1 Ohm LM324 9k 9K 1k 1k Ground Gambar 3.13 Sensor Arus Dengan Non Inverting Amplifier 3.2.6 Mikrokontroler Arduino Mega Arduino mega digunakan sebagai control utama untuk pengambilan dan pengolahan data dari sensor ACS712 maupun sensor tegangan dari pembagi tegangan. Besar tegangan dan arus akan ditampilkan di seven segmen 3digit. Tabel 3.1 Konfigurasi Penggunaan Pin/Port Arduino Mega Port Aplikasi Port MikroArduino V1 V2 I1 I2 Port (a) 7segmen 13 22 48 39 Port (b) 7segmen 12 24 46 41 Port (c) 7segmen 11 26 44 43 Port (d) 7segmen 10 28 42 45 Port (e) 7segmen 9 30 40 47 Port (f) 7segmen 8 32 38 49 Port (g) 7segmen 7 34 36 50 Port (dot) 7segmen 3 29 15 16 Port (Com1) 7segmen 4 23 33 51 Port (Com2) 7segmen 5 25 35 52 Port (Com3) 7segmen 6 27 37 53 Inputan V1 A0 Inputan V2 A1 Inputan ACS1 A7 Inputan ACS2 A8 28 3.2.7 Modul Regulator Regulator menggunakan XL6009 yaitu regulator converter DC to DC Boost Regulator atau regulator penguat tegangan dengan output yang diatur untuk pengisian aki yaitu sebesar 14.7 VDC. Gambar 3.14 Skematik Rangkaian Regulator XL6009 Rangkaian diatas bekerja pada inputan diatas 3 V DC dan dapat diatur besar keluarannya dengan potensiometer. Besarnya keluaran pada modul regulator XL 6009 dapat dicari dengan cara Vout = 1,25 × ( 1 + R2 ) R1 Gambar 3.15 Modul Regulator XL6009 3.2.8 Pulley Pulley berfungsi sebagai penghubung gerakan turbin kegenerator. Dalam perancangan ini menggunakan pulley dengan perbandingan 2:3, untuk pulley turbin menggunakan diameter 9cm sedangkan diameter pulley generator sebesar 6cm. 29 Perbandingan pulley di dapat dari besar diameter kedua pulley dan berpengaruh pada besar rpm. Jika jari-jari pulley yang pertama atau pulley turbin (𝑟1) = 4,5cm = 0,045m sedangkan pulley generator (𝑟2 ) = 3cm = 0.03m dan dihasilkan putaran sudut pulley turbin (𝜔1 ) = 58rpm = 6,07 rad/s maka putaran sudut pulley generator (𝜔2 ) sebesar : 𝝎𝟏 𝒓𝟏 = 𝝎𝟐 𝒓𝟐 …………………..…..(3.19) Dimana : 𝑟 1 = Jari − jari Pulley Turbin … … … … … … … … … … . … . . … . . . m 𝑟 2 = Jari − jari Pulley Generator … … … … … … … . … … … … … m 𝜔 1 𝜔 2 rad s rad = Kecepatan Sudut Pulley Generator … … . … … … … … . . . s = Kecepatan Sudut Pulley Turbin … … … … … … … … … . . . 6,07 × 0,045 = 𝜔2 × 0,03 𝜔2 = 9,10 𝑟𝑎𝑑 𝑠 = 86,9 rpm = 87 rpm Gambar 3.16 Pulley 3.2.9 Meja Alat Berfungsi sebagai tempat dari semua mekanik dan modul. Berukuran 𝑃𝑎𝑛𝑗𝑎𝑛𝑔 × 𝐿𝑒𝑏𝑎𝑟 × 𝑇𝑖𝑛𝑔𝑔𝑖 = 80𝑐𝑚 × 45𝑐𝑚 × 80𝑐𝑚 Meja alat diberi roda pada bagian bawahnya agar mudah dipindahkan. 30 . Gambar 3.17 Meja Alat 3.3 Perancangan Perangkat Lunak Pada bagian ini akan dijelaskan tentang perangkat lunak yang ada pada sistem. Perangkat lunak ini meliputi perancangan perangkat lunak yang ditanamkan pada mikrokontroler Arduino Mega 2560. Gambar 3.18 Blok Diagram Alir 31 Penjelasan diagram alir mikrokontroler arduino : 1. Saat pertama dihidupkan mikrokontroler arduino akan langsung melakukan inisialisasi sensor arus dan tegangan 2. Jika ada arus dan tegangan yang dideteksi maka akan diolah pada inputan ADC arduino 3. Data dari ADC arduino akan ditampilkan pada 7 Segmen 3 digit dengan sistem scaning timer satu persatu. 4. Saat arduino selesai melakukan tugasnya maka arduino akan menunggu sampai ada masukan berikutnya dan melakukan tugas selanjutnya. 3.3.1 Pembacaan ADC Arduino Arduino memiliki karakteristik 10 bit ADC dan dapat menerima inputan tegangan maksimal 5 volt sehingga untuk mendeteksi tegangan diatas 5 volt diperlukan pembagi tegangan untuk mengurangi besar tegangan yang masuk pada inputan ADC arduino. Cara membaca inputan ADC pada arduino, dikarenakan memiliki 10 bit ADC dan maksimal tegangan 5 volt maka data yang terbaca pada arduino jika dikonversi adalah 10 𝑏𝑖𝑡 = 210 = 1024 𝑑𝑖𝑔𝑖𝑡 = 0-1023 pada saat tegangan maksimal 5 volt. Sehingga setiap langkah dapat dihitung 5 1023 = 0,00488 𝑣𝑜𝑙𝑡 per langkah., dengan kata lain jika ada inputan tegangan 3 volt akan 3 dibaca 615 oleh ADC arduino, ADC Reading 3V = 0,00488 = 615𝑑𝑖𝑔𝑖𝑡 . Jadi untuk mencari voltase analognya = reading (615 digit atau 3.00 volt) didapat sesuai 3 volt. Berikut contoh coding pada pembacaan inputan ADC 32 5 1023 × ADC