STRUKTUR RANGKA BATANG
advertisement

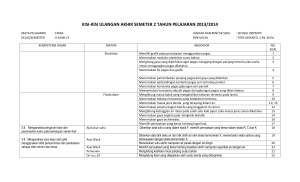
PEMODELAN PARAMETER Komponen-komponen yang merupakan pemodelan himpunan parameter dari sebuah struktur adalah Sesuatu yang menghubungkan gaya dengan perpindahan, kecepatan, dan percepatan. Komponen yang menghubungkan gaya dengan perpindahan disebut pegas. Gambar idealisasi pegas tak bermassa dan plot gaya dari pegas terhadap regangan. Hubungan linier antara gaya dan regangan dinyatakan : fs = k e dan, e=u2-u1 dimana k adalah konstanta pegas. Besaran k adalah pound/inc (lb/in) atau N/m Energi tegangan dinyatakan dengan : V = ½ (k e2) Energi tegangan dinyatakan sebagai area dibawah kurva fs terhadap e. Model analitis yang paling umum dari redaman dalam analisa dinamika struktur adalah model tahanan dashpot, Gaya redaman fD dinyatakan : fD = c (ů 2 – ů1 ) dari fungsi linier dari kecepatan relatif antara dua ujung dashpot. Konstanta c disebut koefisien viscositas redaman dan besarannya adalah pond/inc/detik atau N/m/detik. Model matematis dalam analisa dinamika struktur mempunyai beberapa elemen sebagai berikut: massa m menyatakan massa dan sifat inersia dari struktur pegas k menyatakan gaya balik elastis dan kapasitas energy potensial dari struktur redaman c menyatakan sifat geseran dan kehilangan energy dari struktur gaya pengaruh F(t) menyatakan gaya luar yang bekerja pada sistem struktur sebagai fungsi dari waktu. Namun dalam pembahasan dinamika struktur dengan analisa sederhana pada sistem berderajat kebebasan tunggal, redaman c diabaikan. PEMODELAN MATEMATIS Contoh model matematis pada struktur m K EI Model Struktur Model SDOF Model Matematis K m y PEMODELAN MATEMATIS Contoh model matematis pada struktur m P(t) P(t) K1 K2 Model Struktur K Model SDOF Model Matematis K m P(t) PEMODELAN MATEMATIS Jika suatu pegas terpasang secara paralel atau seri, maka diperlukan penentuan konstanta pegas ekivalen dari sistem tersebut Pegas Paralel Pegas Seri K1 K1 K2 K2 y m y P ke k1 k2 n k e ki i 1 1 1 1 ke k1 k 2 n 1 1 ke i 1 ki KONSTANTA PEGAS P K . yo yo K P yo P yo P Ph 3 yo 12 EI P P 12 EI K Ph 3 yo h3 12 EI P EI EI h yo PL3 yo 48EI P P 48EI K 3 3 PL yo L 48 EI P EI yo L Pl 3 yo 3EI P P 3EI K Pl 3 yo L3 3EI suatu sketsa dari benda yang dipisahkan dari benda lainnya, dimana semua gaya luar pada benda terlihat jelas K m P(t) FBD….? fs P(t) I Dari gambar free body diagram diatas, menunjukan bahwa massa m yang dipindahkan dengan adanya gaya luar sebesar P(t), dan memberikan gaya pegas sebesar Fs=ky serta gaya inersia I. Persamaan Gerak dari beberapa model, dapat diturunkan dengan menggunakan : 1. Hukum Newton Kedua 2. Prinsip D’Alembert 1. Hukum Newton Kedua ΣF=m.a m = massa a = percepatan (m/s^2) 1. Hukum Newton Kedua y fs fs m ΣF=m.a P(t) - fs m.y fs m.y P(t) k.y m.y P(t) P(t) CONTOH 2.1 Gunakan hukum Newton untuk menurunkan persamaan gerakan dari system pegas sederhana dan dashpot massa di bawah ini. Asumsikan hanya ada gerakan vertical. Dan asumsikan bahwa pegas linier dengan konstanta pegas k. Abaikan gesekan udara, massa pegas, dan redaman dalam pegas. P(t) adalah gaya yang bekerja pada massa dari luar. k c Penyelesaian Tentukan bidang referensi dan kordinat perpindahan k c Pilih sumbu x sepanjang garis pergerakan dan tentukan titik acuan awal (misal x = 0) pada lokasi dimana pegas tidak teregang. u perpindahan pada arah x. Gambar diagram free body dari partikel Gunakan hukum Newton yang kedua Fx mu catatan : tanda + menunjukkan arah ke bawah dimana u adalah positif untuk arah ke bawah. p fs fd W mu •Hubungkan gaya dengan system variable gerakan fs ke ku fd ce cu • Gabungkan dan sederhanakan, susunlah variable yang tidak diketahui di bagian kanan pada persamaan mu cu ku W p(t ) Persamaan ini bisa disederhanakan dengan pertimbangan sebagai berikut. Perpindahan statis dari berat W pada pegas linier dinyatakan W u st k Misalkan perpindahan dari massa terukur relatif terhadap posisi kesetimbangan statis sebagai ur sehingga : u u r u st dimana ust adalah konstan, Persamaan gerak bisa ditulis sebagai : mur cur kur p(t ) Hukum Newton yang kedua digunakan langsung, sehingga tidak ada gaya inersia yang diperlihatkan pada diagram free body. 2. Prinsip D’Alembert Sebuah sistem dapat dibuat dalam keadaan keseimbangan dinamis dengan menambahkan sebuah gaya fiktif pada gaya-gaya luar yang disebut sebagai gaya inersia. Contoh yang sering kita rasakan adalah bila kita naik mobil, kemudian di rem atau diperlambat dimana percepatan yang arahnya berlawanan dengan gerak mobil. Kita akan merasa terdorong ke depan. Sebenarnya gaya yang mendorong kita adalah gaya inersia yang timbul karena mobil mempunyai percepatan. fI=-m.a Keseimbangan dinamis= ΣF+fI = 0 2. Prinsip D’Alembert y fs fs = ky m P(t) I my Keseimbangan dinamis= ΣF+fI = 0 P(t) - fs fI 0 P(t) - k.y m.y 0 k.y m.y P(t) Gunakan metode gaya D’alembert untuk menentukan persamaan gerakan dari massa m, asumsikan bahwa gaya redaman pada system bisa diwakili dengan viskos dashpot linier seperti yang diperlihatkan pada gambar di bawah. Asumsikan bahwa eksitasi terdukung z(t) diketahui. Jika u = z = 0 pegas belum diregangkan. Main Menu Penyelesaian Gambarkan diagram free body dari massa termasuk gaya inersia bersama dengan gaya sesungguhnya. Tulis persamaan kesetimbangan dinamis F 'x 0 Dari diagram freebody didapat p fs fd mu 0 Hubungkan gaya sederhanakan dengan variable gerakan dan mu c(u z) k (u z) p Ingat bahwa gaya redaman dan gaya pegas yang dihubungkan dengan gerakan dari massa mempunyai hubungan dengan gerakan yang terdukung. Persamaan diatas bisa dituliskan dengan semua nilai yang diketahui dari bagian kanan persamaan. mu cu ku cz kz p wu z cw kw p mz mw k k c fs P(t) I fs fd I P(t) k.u P(t) m.u c.u k.u P(t) m.u