BAB 2 LANDASAN TEORI 2.1. Mikrokontroller AVR Mikrokontroller
advertisement

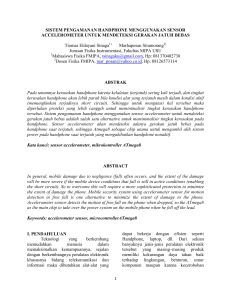
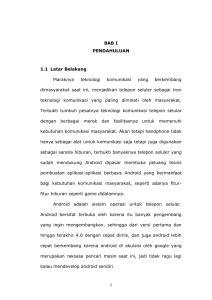
BAB 2 LANDASAN TEORI 2.1. Mikrokontroller AVR Mikrokontroller adalah suatu alat elektronika digital yang mempunyai masukan serta keluaran serta dapat di read dan write dengan cara khusus. Mikrokontroller dapat diberikan suatu program yang bekerja sesuai dengan keinginan pengguna. Sehingga mikrokontroller dapat dihubungkan dengan alat-alat lain. Bisa dikatakan mikrokontroller sebagai otak dari sistem secara keseluruhan. Tipe AVR yang kami pakai adalah : 2.1.1. AVR ATmega8535 Seri ATmega mempunyai program memory sebanyak 4256 kB dengan jumlah pin sebanyak 28-100 pin serta set instruksi yang lebih banyak untuk menangani program yang lebih besar. Dilengkapi pula set perangkat yang lebih luas. AVR memiliki arsitektur RISC 8 bit, sehingga semua instruksi dikemas dalam kode 16 bit (mnemonic) dan sebagian semua instruksi di eksekusi dalam satu siklus instruksi clock. Yang membedakan dari semua keluarga AVR adalah ukuran memori ROM, perangkat yang dipakai, dan fitur yang tersedia. Untuk instruksi dan arsitektur bisa dikatakan hampir sama. 5 6 ATmega8535 Gambar 2.1 Konfigurasi pin ATmega8535 2.2 Accelerometer Accelerometer adalah sebuah alat yang berfungsi untuk mengukur percepatan, mendeteksi dan mengukur getaran, ataupun untuk mengukur percepatan akibat gravitasi bumi. Accelerometer juga dapat digunakan untuk mengukur getaran yang terjadi pada getaran, bangunan, dan mesin. Selain itu, accelerometer juga biasa digunakan untuk mengukur getaran yang terjadi di dalam bumi, getaran mesin, jarak yang dinamis, dan kecepatan dengan ataupun tanpa dipengaruhi gravitasi bumi. 7 2.2.1 Cara Kerja Accelerometer Sebuah Accelerometer digunakan untuk mengukur percepatan dan gravitasi yang dirasakan. Sebuah aceelerometer yang diletakkan di permukaan bumi mendeteksi percepatan sebesar 1g (ukuran gravitasi bumi) pada titik vertikal. Untuk percepatan yang dikarenakan oleh pergerakan horizontal, accelerometer akan mengukur percepatan secara langsung ketika bergerak secara horizontal. Dalam penelitian ini, accelerometer akan digunakan untuk mengukur percepatan statis yang akan digunakan sebagai sensor kemiringan untuk mendapatkan nilai sudut. Keluaran yang dihasilkan accelerometer adalah tegangan analog yang berbanding lurus dengan kemiringan. 8 Untuk menghitung sudut kemiringan dari tegangan keluaran accelerometer, beberapa tahap perlu dimasukkan dalam program perangkat lunak mikrokontroller : Misalkan: Vcc = 3.3 V, A = 1g, nbits = 10, Voffset= 1.65 V Persamaan (2-1) (2-2) (2-3) (2-4) (2-5) 2.2.2 Accelerometer Piezoelektrik Kristal piezoelektrik terpasang pada accelerometer akan menghasilkan tegangan akibat getaran dimana tegangan yang dikeluarkan akan dikonversikan menjadi kecepatan. 9 2.2.3 Spesifikasi Accelerometer Spesifikasi dari accelerometer MMA7361L yang dipakai adalah : 2.3 • Dimensi : 3 mm x 5 mm x 1.0 mm • Konsumsi arus : 400 uA • Arus dalam mode sleep : 3 uA • Operasi tegangan : 2.2 V – 3.6 V • Sensivitas : 800 mV/g @ 1.5g • Pilihan sensitivitas : ±1.5 g, ±6 g • Waktu menyala : 0.5 ms Enable Response Time • Rentang temperatur : –40 to +125°C • Maksimum percepatan : ±5000 g • Tegangan pasokan : –0.3 V to + 3.6 V Gyroscope Gyroscope adalah alat yang berguna untuk menentukan orientasi gerak yang berotasi dengan cepat pada poros sumbu. Gyroscope memiliki keluaran yang peka terhadap kecepatan sudut dari arah sumbu x yang nantinya akan menjadi sudut Φ (roll), dari sumbu y nantinya menjadi sudut θ (pitch), dan sumbu z nantinya menjadi sumbi ψ (yaw). 10 Gambar 2.2 Arah pengukuran kecepatan oleh gyroscope. Gyroscope mengukur kecepatan sudut dalam sudut/detik atau rad/detik. Untuk menghitung kecepatan sudut dari keluaran gyroscope, beberapa tahap perlu dimasukkan dalam program perangkat lunak mikrokontroller : Misalkan: Vcc = 3.3 V, nbits = 10, Vstatic = 1.65 V (2-6) (2-7) 11 (2-8) (2-9) 2.4 Sistem Kendali Sistem kendali dapat dikatakan sebagai hubungan antara komponen yang membentuk sebuah konfigurasi sistem, yang akan menghasilkan respon sistem yang diharapkan. Jadi harus ada yang dikendalikan, yang merupakan suatu sistem fisis, yang biasa disebut dengan kendalian (plant). Masukan (input) dan keluaran (output), merupakan variabel atau besaran fisis. Keluaran merupakan hal yang dihasilkan oleh kendalian, artinya yang dikendalikan. Masukan adalah yang mempengaruhi kendalian, yang mengatur keluaran. Kedua dimensi masukan dan keluaran tidak harus sama. 2.4.1 Jenis-jenis Sistem Kendali Jenis – jenis sistem kendali terdiri dari 2 macam sistem kendali yaitu sistem untaian terbuka (open loop) dan sistem untaian tertutup (closed loop).Yang kami pakai adalah sistem untaian tertutup (closed loop). 12 2.4.1.1 Sistem Untaian Tertutup (Closed Loop) Sistem kendali untaian tertutup (sistem closed loop) memanfaatkan variabel yang sebanding dengan selisih respon yang terjadi terhadap respon yang diinginkan. Sistem seperti ini juga sering dikenal dengan sistem kendali umpan balik. Gambar 2.3 Sistem Pengendalian Untaian Tertutup 2.5 Motor DC Motor listrik merupakan perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik menggunakan tegangan masukan sebagai variabel pengendali. Motor DC juga banyak digunakan dalam dunia industri. Kumparan medan pada motor DC disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). 13 Motor DC tersedia dalam banyak ukuran, namun penggunaannya pada umumnya dibatasi untuk beberapa penggunaan berkecepatan rendah, penggunaan daya rendah hingga sedang, seperti peralatan mesin dan rolling mills, sebab sering terjadi masalah dengan perubahan arah arus listrik mekanis pada ukuran yang lebih besar. Penelitian yang akan kami buat menggunakan Motor DC dengan spesifikasi: 2.6 • Maksimal tegangan : 18 V • Maksimal arus : 7.5 A • Ratio gear adalah 1 : 75 Motor Driver 2.6.1 Cara kerja Driver Rangkaian driver motor DC disebut dengan half-bridge dikarenakan konfigurasi/susunan transistornya seperti membentuk huruf H. Transistor-transistor ini digunakan sebagai switching sehingga motor dapat berputar searah jarum jam (clockwise) dan berlawanan arah jarum jam ( counter clockwise). Prinsip kerja half-bridge adalah mengatur aliran arus pada motor DC. Apabila aliran arus dibalik maka motor DC akan berputar ke arah sebaliknya. 14 Gambar 2.4 Rangkaian Half-Bridge 2.6.2 Motor Driver yang digunakan Motor driver yang kami gunakan adalah dual full-bridge driver L298 yang merupakan dual-motor driver yang dapat beroperasi dalam jangkauan tegangan 6 hingga 46 V dan mengatur 4 A arus, pada IC ini terdapat 4 buah masukan untuk mengatur arah jalannya motor, dan enable pada setiap 2 buah jalur masukan. 15 2.7 PWM ( Pulse Width Modulation ) PWM adalah bentuk gelombang digital/pulsa yang bisa kita atur duty cycle untuk digunakan pada motor DC. Dengan memberi pulsapulsa untuk waktu on/high dan off/low atau sebuah cara pengalihan daya dengan menggunakan sistem lebar pulsa untuk mengendalikan kecepatan putaran motor DC. Jadi sebenarnya yang diatur adalah rasio waktu pemberian tegangan kepada motor DC melalui perbandingan lama pada saat 1 atau on dan lama periode satu gelombang pulsa. PWM dapat dilakukan dengan dua cara yaitu dengan perangkat keras (hardware) dan perangkat lunak (software). (2-10) Gambar 2.5 Pulse Width Modulation 16 Dengan mengunakan metode PID, hasil dari perhitungan dari PID harus dikonversikan ke PWM. Sinyal kendali dikalibrasikan ke sebuah nilai variabel dalam program yang mempunyai rentang 0-255. 2.8 Sistem Kendali PID Sistem kendali PID (Proporsional Integral Derivatif) adalah sebuah generic controller yang banyak dipakai pada dunia industri. Sebuah sistem kendali PID mencoba untuk memperbaiki kesalahan antara sebuah nilai proses dan nilai setpoint yang diinginkan dengan menghitung dan melakukan pembenaran sehingga dapat meminimalkan kesalahan. Sistem kendali PID terdiri dari 3 komponen utama, yaitu : proportional, integral, derivatif. Proportional menentukan nilai reaksi terhadap kesalahan saat ini. Derivatif menentukan nilai perubahan kesalahan yang terjadi dari kesalahan saat ini dengan kesalahan sebelumnya. Integral menentukan hasil penjumlahan nilai kesalahan yang terjadi. Hasil nilai dari proses PID ditentukan dengan rumus : ( 2-11) 17 Gambar 2.6 PID controller Secara sederhana rumus dari persamaan (2-11) dapat ditulis : u(t) = P+ I + D (2-12) P = KP * error (2-13) I = KI * ( I + error) (2-14) D = KD * (error – error terakhir) (2-15) error = setpoint – keluaran (2-16) Tabel 2.1 Efek dari nilai komponen PID Parameter Rise time Overshoot Settling time Steady state error KP Menurun Meningkat Perubahan kecil Menurun KI Menurun Meningkat Meningkat Hilang KD Perubahaan Kecil Menurun Menurun Perubahan Kecil 18 2.9 Kalman Filter Algoritma filtering yang bagus merupakan algoritma yang dapat menghilangkan noise dari sinyal electromagnetic tetapi tetap mempertahankan informasi yang berguna. Kalman filter merupakan algoritma yang dapat memperkirakan variabel dari berbagai macam proses. Dalam istilah matematika, kita dapat mengatakan kalman filter memperkirakan kondisi dari sistem linier. Kalman filter tidak hanya bekerja dengan baik dalam praktek, tetapi secara teoritis juga menarik karena dapat ditunjukan bahwa dari semua filter yang mungkin, kalman filter merupakan salah satu filter yang meminimalkan varian dari perkiraan error. Kalman filter seringkali diimplementasi dalam sistem embedded control, karena dalam rangka untuk mengontrol suatu proses, diperlukan perkiraan yang akurat dari variabel proses. Gambar 2.7 Algoritma Perhitungan Kalman Filter