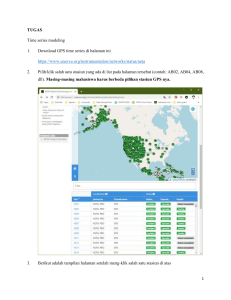
Derivasi (penurunan) anomaly gravitasi dari gravitimeter airborne dan rekaman IMU divalidasi dengan Analisa model regional mengguankan data gravity darat dan satelit Abstrak Untuk menguji kemampuan dari upgrade gravitimeter airborne Lacoste dan Romberg S124 dan mengevaluasi software terbaru, pengujian airborne gravity dilakukan di bagian utara jerman dilakukan oleh GFZ Postdam di musim gugur 2006 mwnggunakan pesawat Cessna 404 “Hansa Luftbild” perusahaan Munster. Pada paper ini menunjukan hasil dari sebuah profil terbang SW-NE di kedua arah pada ketinggian rata-rata yang hampir konstan sekitar ~1100 m dengan kecepatan gerak ~230km/h, melintasi salah satu anomaly gravitasi yang paling menonjol di eropa tengah dengan amplitudo peak-to-peak sekitar 70 mgal. Anomali gravity scalar disepanjang lintasan penerbangan telah diturunkan dari gravimeter airborne dengan memperhitungkan rekaman platform dari unit pengukuran inersia (IMU) Aerocontrol IIb yang dikendalikan oleh GPS. Semua koreksi umum yang telah dilakukan pada raw data gravity. Karena permasalahan pada perekaman GPS, maka hanya digunakan data IMU. Untuk memverivikasi hasil airborne gravitasi, data gravitasi darat dan satelit telah digunakan untuk menghitung model Analisa lokal medan gravitasi dalam metode baru yang memungkinkan kalkulasi anomaly gravitasi pada ketinggian penerbangan. Pada Sebagian besar ada kesepakatan(kecocokan) yang baik antara INS-airborne yang diturunkan dan anomaly gravitasi yang dimodelkan secara independent, menghasilkan RMS sekitar 3,5 Mgal Pointnya: Menguji kemampuan gravitimeter udara Lacoste dan Romberg S124 Mengevaluasi software baru Pengujian dilakukan di jerman bagian utara Menunjukan profil terbang SW-NE ketinggian konstan kecepatan gerak 230km/h Melintasi anomaly paling menonjol di eropa barat GPS bermasalah maka digunakan IMU saja Verifikasi data airborne menggunakan model darat dan satelit untuk menghitung modle Analisa local medan gravitasi dalam metode baru yang memungkinkan kalkuklasi anomaly gravity pada ketinggian penerbangan RMS sekitar 3.5 mgal Profil penerbangan dan titik anomali gravitasi terkait yang digunakan untuk prosedur validasi (3238 titik terestrial (titik coklat); titik turunan CHAMP pada 200 km (kecil kotak hijau) dan ketinggian 400 km (kotak merah besar); cf. penjelasan lebih lanjut di Bagian 6. 2. Hardware Komponen 2.1 Gravity Airborne Gravimeter LaCoste dan Romberg Air-Sea adalah gravimeter tipe pegas yang sangat teredam berdasarkan prinsip panjang nol yang dipasang di platform yang distabilkan oleh gyro dengan elektronik pengontrol dan akuisisi data (LaCoste, 1967; Valliant, 1992). Parameter teknis utamanya adalah: dimensi: 71cm × 56cm × 84 cm; massa: 86 kg; kisaran: 12.000 mgal; drift: 3mgal per bulan; akurasi: ∼1mgal; tingkat perekaman: 1 Hz; lapangan platform: ± 22◦; gulungan platform: ± 25◦. 2.2 GPS/IMU system Aerocontrol IIb Penentuan posisi sensor yang tepat dilakukan oleh sistem GPS / IMU Aerocontrol IIb. Sistem Aerocontrol dikembangkan terutama untuk penentuan posisi, orientasi, dan kecepatan sensor udara yang tepat untuk fotogrametri dan penginderaan jauh, seperti kamera pemetaan udara, sistem LiDAR udara, atau SAR. Untuk mendapatkan akurasi yang memadai untuk referensi geografis langsung dari sensor ini, sistem Aerocontrol dirancang untuk mencapai akurasi 0,005◦ untuk sudut roll dan pitch dan 0,01◦ untuk heading. Akurasi posisi absolut tergantung pada keakuratan GPS yang sebenarnya. Pemrosesan fase pembawa frekuensi ganda yang digunakan menyediakan pemosisian dalam akurasi dalam kisaran beberapa sentimeter. Meskipun kualitas solusi pemosisian akhir bergantung pada kondisi GPS sesaat, penggabungan GPS dan teknologi inersia mengarah pada peningkatan keakuratan penentuan lintasan sensor udara. Perbaikan utama adalah: IMU beroperasi pada kecepatan data yang jauh lebih tinggi daripada GPS. Untuk kampanye pengukuran yang dijelaskan, pesawat yang bergerak dengan kecepatan 230 km / jam (∼125 kts), jarak antara dua pengukuran posisi GPS kira-kira 64m untuk 1 Hz atau 13m untuk 5 Hz, masing-masing. Untuk data rate IMU yang digunakan (50 Hz) jarak antara dua posisi pengukuran adalah 128 cm. Untuk menghitung posisi yang tepat di antara pengukuran, pendekatan spline digunakan. Pengukuran orientasi IMU memungkinkan pengambilan offset posisi (efek lengan tuas) antara gravimeter udara, IMU, dan pusat fase antena GPS dengan benar. Lintasan termasuk sikap dan kecepatan dihitung dari pengukuran IMU dengan apa yang disebut "algoritma strap down". Kombinasi optimal dari GPS dan informasi IMU, termasuk perkiraan kalibrasi IMU yang tepat, dilakukan dalam proses filter Kalman. Output dari proses ini adalah lintasan yang dihaluskan yang diperoleh dari pemrosesan data maju dan mundur dalam waktu. IMU mencakup tiga akselerometer dan dua giroskop yang disetel dengan masing-masing dua sumbu sensitif. Properti mereka ditunjukkan pada Tabel 1. Pemrosesan sinyal berlangsung di unit elektronik terpisah yang dipasang di samping IMU. IMU-IIb menyediakan pengukuran tingkat sudut dan akselerasi dengan akurasi tinggi dengan kecepatan pembaruan 50 Hz. 3. Pengolahan dan Pemrosesan Data Dengan mengabaikan percepatan horizontal, karakteristik gravimeter laut / udara dinamis pegas panjang nol LaCoste dan Romberg dapat dijelaskan dengan persamaan diferensial Tegangan pegas secara perlahan disesuaikan dengan loop umpan balik untuk mencegah balok drifting terlalu jauh dari kesetimbangan. Pembacaan kecepatan balok ˙B dan tegangan pegas dapat dilakukan meskipun balok sedang bergerak. Pengukuran menjadi kombinasi kecepatan balok dan tegangan pegas sehingga orde pertama tidak tergantung pada posisi balok. Mempertimbangkan peercepatan vertical harus memperhitungkan efek cross coupling. Di sini percepatan vertikal menyebabkan defleksi lengan(arm) tuas dan percepatan horizontal yang bekerja setelah pergeseran fasa tertentu menyebabkan torsi tambahan. 3.1 Variasi gravitasi berasal dari gravimeter dan data platform (δgc) Merujuk ke persamaan 2 Maka pembacaan gravimeter dapat dihitung sebagai berikut