Laporan Praktikum Pengaturan Kecepatan Motor DC dengan IC NE555
advertisement

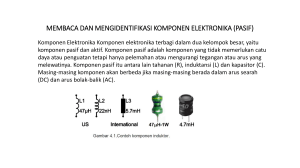
LAPORAN PRAKTIKUM PENGATURAN MESIN-MESIN LISTRIK DISUSUN OLEH : NAMA : AGRITIAN SEVTY FIDDARIANI KELAS : B2 NIM : 18/432299/SV/16235 HARI/TGL : SELASA, 5 OKTOBER 2020 DOSEN PENGAMPU : IR. Y. WAHYO SETIYONO ASISTEN DOSEN : 1. KURNIA PUTRA P 2. HABIB WARIH K PROGRAM STUDI DIPLOMA TEKNOLOGI LISTRIK DEPARTEMEN TEKNIK ELEKTRO DAN INFORMATIKA SEKOLAH VOKASI UNIVERSITAS GADJAH MADA 2020 HASIL PRAKTIKUM Pada pertemuan pertama ini, praktikan melaksanakan praktikum dengan topik rangkaian pengatur kecepatan motor DC menggunakan software Proteus 8.9 yang diproduksi oleh Labcenter Electronics. Langkah-langkah praktikum diawali dengan pemaparan materi Mesin-Mesin Listrik. Kemudian, praktikum dilanjutkan dengan mempelajari macam-macam rangkaian pengatur kecepatan motor DC. Jenis-jenis rangkaian pengatur kecepatan motor DC sangat beragam. Beberapa contoh yang bebas di pasaran adalah IC NE555, H-bridge, dan lain-lain. Praktikan membuat rangkaian pengatur kecepatan motor DC dengan menggunakan timer berjenis IC NE555. Berikut ini adalah skema rangkaian pengatur kecepatan motor DC dengan IC NE555 yang telah disimulasikan pada Proteus 8.9 : Komponen yang digunakan : 1. IC NE555 : 1 buah 2. Dioda 1N4007 : 3 buah 3. Resistor Variabel 100K Ω : 1 buah 4. Kapasitor 10000pF : 2 buah 5. Resistor 10K Ω : 1 buah 6. Mosfet IRLZ44N : 1 buah 7. Motor DC : 1 buah 8. Osiloskop : 1 buah Hasil Simulasi : Nilai Resistor Variabel : 0% Nilai Resistor Variabel : 25% Nilai Resistor Variabel : 50% Nilai Resistor Variabel : 75% Nilai Resistor Variabel : 100% Berdasarkan hasil praktikum, salah satu rangkaian pengatur kecepatan motor DC adalah dengan menggunakan IC NE555. Terlihat hasil gelombang membentuk pulsa yang disebut Pulse Width Modulation (PWM). Resistor variabel berfungsi untuk mengatur laju motor sesuai yang dibutuhkan. Semakin besar nilai resistor variabel, maka kecepatan gerak motor DC akan semakin lambat. Begitu juga sebaliknya. REVISI Terdapat beberapa penambahan komponen pada rangkaian pengatur kecepatan motor. Pertama, dilakukan penggantian jenis motor untuk dapat menampilkan kecepatan putar motor atau rpm. Kedua, dilakukan penambahan input pada osiloskop untuk mengetahui bentuk gelombang charge dan discharge dari fungsi kedua diode. Berikut merupakan rangkaian yang telah dilakukan penambahan komponen : Berikut merupakan hasil pengamatan gelombang : a. Nilai Resistor Variabel : 0 % Gelombang warna kuning merupakan gelombang output dari charge dan discharge, gelombang warna biru merupakan gelombang output dari sinyal PWM, dan gelombang warna pink merupakan gelombang output kinerja resistor variabel. Pada keadaan nilai resistor variabel sebesar 0%, kecepatan putar motor mencapai 361 rpm. Pada gelombang warna kuning yang merupakan output dari charge dan discharge, ketika dioda memberikan sinyal agar kapasitor mengisi arus listrik maka gelombang akan naik dan hal tersebut menyebabkan IC 555 mengeluarkan output sinyal on pada motor dc yang ditunjukkan pada gelombang warna biru. Selain itu, ketika dioda memberikan sinyal agar kapasitor mengalirkan arus listrik dan berangsurangsur menurun hingga mencapai titik 0 maka gelombang akan berada pada titik terbawah dan menyebabkan IC 555 mengeluarkan output sinyal off pada motor dc. Selanjutnya pada gelombang warna pink, gelombang ini menunjukkan lama waktu proses charge dan discharge yang diatur oleh nilai resistor variabel. Terlihat ketika nilai 0 lama waktu charge dan discharge jauh lebih singkat karena tidak terdapat penahanan waktu sehingga kecepatan motor pun dapat maksimal. b. Nilai Resistor Variabel : 25 % Kecepatan putar motor yang diraih sebesar 355 rpm. Terlihat dengan adanya nilai resistor yang meningkat gelombang penahanan waktu pun meningkat sehingga proses charge dan discharge menjadi lebih lambat serta hal tersebut mengakibatkan output gelombang PWM bertambah melambat. c. Nilai Resistor Variabel : 50% Kecepatan putar motor yang diraih sebesar 338 rpm yang artinya semakin melambat. Terlihat dengan adanya nilai resistor yang meningkat gelombang penahanan waktu pun meningkat sehingga proses charge dan discharge menjadi lebih lambat serta hal tersebut mengakibatkan output gelombang PWM bertambah melambat. d. Nilai Resistor Variabel : 75% Kecepatan putar motor yang diraih sebesar 291 rpm yang artinya semakin melambat. Terlihat dengan adanya nilai resistor yang meningkat gelombang penahanan waktu pun meningkat sehingga proses charge dan discharge menjadi semakin lambat serta hal tersebut mengakibatkan output gelombang PWM bertambah melambat. Hal tersebut menyebabkan kecepatan motor semakin lambat. e. Nilai Resistor Variabel : 100 % Motor menjadi terhenti dengan nilai rpm terakhir 298. Terlihat dengan adanya nilai resistor yang maksimum gelombang penahanan waktu pun secara total sehingga proses charge dan discharge menjadi semakin terhenti pada discharge saja serta hal tersebut mengakibatkan output gelombang PWM menjadi off. Hal tersebut menyebabkan kecepatan motor berhenti. ILMU YANG DIDAPAT Untuk mengatur kecepatan motor DC salah satunya dapat menggunakan metode PWM (Pulse Width Mudulation). Dengan metode ini motor DC diberikan sumber tegangan yang stabil dengan frekuensi kerja yang sama tetapi T-on duty cycle pulsa kontrol kecepatan motor DC yang bervariasi. Konsep PWM pada driver motor DC adalah mengatur lebar sisi positif dan negatif pulsa kontrol pada frekuensi kerja yang tetap. Semakin lebar sisi pulsa positif maka semakin tinggi kecepatan putar motor DC dan semakin lebar sisi pulsa negatif maka semakin rendah kecepatan putar motor DC.Prinsip pengaturan kecepatan motor DC menggunakan rangkaian kontrol kecepatan motor DC dengan NE555 adalah dengan mengontrol tegangan supply ke motor DC. IC NE555 di setting sebagai astable multivibrator dengan frekuensi kerja tetap (nilai RC tetap) dengan output diberikan ke rangkaian driver motor DC sederhana dengan mosfet. Konsep dasar kontrol PWM menggunakan rangkaian diatas terletak pada penambahan dua buah dioda yang mengendalikan proses charge dan discharge kapasitor 10000pF. Posisi tuas resistor variabel 100 K yang terhubung dengan dua buah diode tersebut akan menentukan waktu charge atau discharge kapasitor 10000pF. Terdapat dioda yang terpasang parallel dengan motor dan berfungsi sebagai pengaman apabila terjadi perubahan nilai tegangan yang signifikan. Dioda akan membalikkan tegangan yang dapat merusak motor.